水下機器人推進器控制系統PWM及電流信號降噪方法
2021-05-15 07:54:16殷寶吉周佳惠唐文獻董亞鵬
水下無人系統學報 2021年2期
殷寶吉, 周佳惠, 唐文獻, 董亞鵬
水下機器人推進器控制系統PWM及電流信號降噪方法
殷寶吉1, 2, 3, 周佳惠1, 2, 唐文獻1, 2, 董亞鵬1, 2
(1. 江蘇科技大學 機械工程學院, 江蘇 鎮江, 212003; 2. 江蘇科技大學 江蘇省船海機械先進制造及工藝重點實驗室, 江蘇 鎮江, 212003; 3. 哈爾濱工程大學 水下機器人技術重點實驗室, 黑龍江 哈爾濱, 150001)
針對水下機器人推進器控制及其運行狀態監測問題, 研究了推進器控制系統脈沖寬度調制(PWM)信號及電流信號降噪方法。針對基于典型串聯接地方式建立的推進器控制電路中, PWM信號的紋波幅值及占空比波動都較大的問題, 設計了一種冗余接地電路, 該電路在主控中央處理器和模擬轉脈沖寬度調制模塊之間單獨增加一條地線, 以避免信號受到電源地線的干擾。針對推進器工作電流信號數據中噪聲干擾較強, 以及基于小波分解降噪后電流數據與真實電流數據的誤差仍然較大的問題, 提出了一種基于小波分解和七點滑移平均交叉耦合的耦合降噪方法。水池試驗結果表明, 冗余接地電路與典型串聯接地電路相比, 具有更小的紋波幅值和占空比波動; 利用所提耦合降噪方法的電流數據與原始電流數據和小波分解降噪后電流數據相比, 與真實電流數據的誤差更小。試驗結果驗證了上述方法的有效性。
水下機器人; 推進器; 控制電路; 脈沖寬度調制信號; 電流信號; 降噪
0 引言
水下機器人在海洋資源開發、海洋工程檢測、海洋環境監測等領域得到了廣泛的應用[1]。推進器是水下機器人關鍵動力部件[2], 起著保障水下機器人機動性能的作用[3], 其可靠性直接影響水下機器人的安全性[4]。良好的控制系統是推進器可靠運行的重要條件。同時, 推進器在工作過程中, 要承受交變載荷、腐蝕等多種作用, 也是水下機器人主要故障源之一[5], 所以, 需要實時監測其運行狀態[6]。監測推進器運行狀態的一種有效手段是監測其工作電流[7-8]。為此, 文中圍繞水下機器人推進器控制系統脈沖寬度調制(pulse width modulation, PWM)信號及電流信號降噪方法展開研究。
文中設計了一種如圖1所示的水下機器人推進器控制系統。其工作過程為: 水下機器人控制器輸出控制電壓信號至模擬-PWM(analog-PWM, A-PWM)模塊, A-PWM模塊根據控制電壓信號幅值, 按照線性比例輸出相應占空比的PWM信號, 并通過功率放大模塊控制推進器轉速大小; 同時, 水下機器人控制器輸出數字信號, 通過功率放大模塊控制推進器旋轉方向, 當數字信號I為高電平, 數字信號II為低電平時, 推進器正轉; 當數字信號I為低電平, 數字信號II為高電平時, 推進器反轉; 當數字信號I和數學信號II均為低電平時, 推進器停轉; 電流傳感器測量推進器工作過程中消耗的電流, 并將測量結果以模擬電壓信號的形式反饋給水下機器人控制器。
基于圖1所示控制系統進行試驗時, 發現如下問題: 1) 典型串聯接地電路中, A-PWM模塊輸出的PWM紋波幅值及占空比波動都較大; PWM中的紋波噪聲使得PWM高電平電壓大于理論值, 當其輸入到功率放大模塊時, 其高電平電壓將大于功率放大模塊輸入元件的額定電壓, 造成過載,縮短功率放大模塊的使用壽命。同時, 由于主控中央處理器(central processing unit, CPU)通過調節PWM的占空比來控制推進器的轉速, 所以, PWM占空比波動將引起推進器轉速波動。2) 控制器采集到的推進器電流信號含有較強的噪聲干擾。采用監測推進器電流的方式來監測推進器運行狀態, 電流信號中較強的噪聲干擾容易掩蓋推進器故障在電流信號中所引起的故障特征, 導致出現誤報或漏報。

圖1 水下機器人推進器控制系統
為減小PWM信號紋波幅值和占空比波動, 本質上需要減小電路中的紋波電壓(其依據將在1.1節詳細闡述)。劉揚[9]采用并聯電容的方式減小單一電源紋波電壓。何德軍等[10]采用雙脈寬調制方式減小并聯電源紋波電壓。張國榮等[11]采用正負序雙環直流側電壓控制策略減小柔性多狀態開關直流側紋波電壓。這些方法均從抑制電源紋波電壓的角度出發來減小電路中的紋波幅值, 效果較好, 但是需要添加額外的器件或算法, 從而增加了系統復雜性。文中設計了一種冗余接地電路, 其基本思路是縮短主控CPU與A-PWM模塊之間的共地連接路徑, 以減少共地連接路徑通過的功能模塊的數量, 從而減少不同功能模塊紋波噪聲的疊加。冗余接地電路與典型串聯接地電路的不同之處在于: 典型串聯接地電路中主控CPU的地線需要經過電源模塊I、電源轉換模塊連接到A-PWM模塊的地線上; 而文中冗余接地電路中主控CPU的地線不經過任何功能模塊, 直接連接到A-PWM模塊的地線上。
針對推進器工作電流信號含有較強的噪聲干擾的問題, 常用電流信號降噪方法有小波分解 (wavelet decomposition, WD)降噪方法[12]、小波閾值降噪與經驗模態分解(empirical mode decomposition, EMD)結合方法[13]、粒子濾波算法[14]等, 其中, WD是一種典型的降噪方法[15], 但在試驗中發現, WD降噪后的電流信號與真實電流信號的誤差仍然較大。為此, 文中提出一種基于小波分解和七點滑移平均(seven point slip average, SPSA)的耦合降噪方法, 其基本思路是基于七點滑移平均算法減少每一層小波近似分量中存在的隨機噪聲。
1 冗余接地電路
1.1 典型串聯接地電路
水下機器人推進器控制電路由多個功能模塊組成。為實現這些功能模塊的共地, 典型串聯接地電路將各功能模塊的接地端口依次連接起來, 如圖2所示。

圖2 基于串聯接地的推進器控制電路
記錄圖2中點和點之間PWM信號的紋波和占空比波動。結果如圖3所示。
圖3中:1為紋波幅值;2為占空比波動幅值。在試驗中,1最大值為0.46 V, 占PWM幅度5 V的9.2%。2最大值為0.8 μs, 占PWM周期63.64 μs的1.3%。試驗結果反映出輸入到功率放大模塊PWM信號的紋波幅值和占空比波動較大。

圖3 串聯接地電路中的PWM信號
為分析產生上述問題的原因, 對圖2所示電路做進一步測試。測試過程和結果顯示: 將示波器的2個探針分別接在點和GND7時, PWM信號紋波噪聲減小, 但占空比波動仍然較大; 將GND5與GND6斷開, 而后將GND5直連到GND7, 再次測量點和GND7的PWM時, 發現PWM信號紋波噪聲和占空比波動都減小。
基于上述試驗及測試結果, 分析接地方式的干擾機理: 當GND5與GND6斷開、GND5與GND7直接相連、示波器接在點和GND7時, 主控CPU的地信號以及數模輸出信號以最短路徑直接輸入到A-PWM模塊中, 且這條共地路徑未經過其他功能模塊, 此時對A-PWM模塊而言, 引入到輸入信號中的紋波噪聲最小, 使得其輸出PWM信號的占空比波動也最小, 又由于示波器接在點和GND7時, 本質上是測量A-PWM模塊本身的地線和輸出信號之間的PWM, 使得引入到PWM信號中的紋波噪聲也最小, 故此時示波器測得的PWM信號紋波噪聲和占空比波動都較小; 當GND5與GND7斷開、GND5與GND6直接相連、示波器接在點和GND7時, 主控CPU的地GND5經過GND4、GND3連接到GND7上, 此時, 對A-PWM模塊而言, 其輸入信號中已經引入了電源模塊I以及電源轉換模塊的紋波噪聲, 使得A-PWM模塊輸出的PWM信號存在較大的占空比波動, 又由于示波器接在點和GND7, 引入到PWM信號中的紋波噪聲最小, 故此時示波器測得的PWM信號紋波噪聲較小, 但占空比波動較大; 當GND5與GND7斷開、GND5與GND6直接相連、示波器接在點和點時, A-PWM模塊的輸入信號中引入了電源模塊I以及電源轉換模塊的紋波噪聲, 使得A-PWM模塊輸出的PWM信號存在較大的占空比波動, 又由于示波器接在點和點, 本質上是測量GND6與A-PWM模塊輸出信號之間的PWM, 此時GND6經過GND5、GND4和GND3連接到GND7上, 導致電源模塊I以及電源轉換模塊的紋波噪聲引入到測量回路, 使得示波器測得的PWM信號紋波噪聲較大, 所以此時PWM信號的紋波幅值和占空比波動較大。
1.2 冗余接地電路
為減小PWM信號紋波幅值和占空比波動, 本質上需要減小電路中的紋波電壓。文中基于測試試驗結果設計了一種冗余接地電路, 如圖4所示。

圖4 基于冗余接地的推進器控制電路
如圖4虛線框所示, 電路在GND5和GND7 2個端口之間添加了1根連接線, 使得主控CPU地線與A-PWM模塊地線直接相連, 避免信號受到電源地線的影響, 從而降低電路中的紋波噪聲, 減小PWM信號的紋波幅值和占空比波動。而在典型串聯接地電路中, 如圖2虛線框所示, GND5未與GND7直接相連, 即主控CPU的地GND5需要經過GND4、GND3才能到達A-PWM模塊的地GND7。
2 耦合降噪方法
2.1 典型WD方法
控制器采集到的電流信號原始數據往往含有較強的隨機噪聲, 難以根據工作電流來判斷推進器運行狀態, 因此, 需要對電流信號原始數據進行降噪處理。WD是一種典型的降噪方法[15], 其流程圖如圖5所示[16]。

圖5 WD降噪方法流程圖
在電流信號WD降噪試驗中發現, WD后的電流信號與真實電流信號的誤差仍然較大。文獻[17]提出一種七點滑移平均+小波分解(SPSA+ WD)的推進器電流降噪方法, 該方法采用SPSA方法減小電流數據中傳感器自身隨機噪聲干擾, 基于WD方法減小電流數據中純電流數據本身的隨機性, 效果較好。但進一步研究電流信號數據發現, 電流信號數據中傳感器自身隨機噪聲在各層小波近似分量中都存在, 而SPSA+WD方法只是減小了原始電流信號中的隨機噪聲, 所以該方法的降噪效果有待提高。
2.2 耦合降噪方法
為減小實際電流數據和降噪后電流數據之間的誤差, 提出一種基于WD和SPSA耦合的降噪方法, 其流程如圖6所示。
如圖6中虛線框所示, 首先對原始電流信號進行SPSA處理, 再對處理后信號進行1級WD, 提取1層小波近似分量, 其次對1層小波近似分量進行SPSA處理, 再對處理后信號進行2級WD, 提取2層小波近似分量, 以此類推。該方法在每一層小波分解前加SPSA處理。而在圖5所示的WD流程中, 并未涉及SPSA處理。
耦合降噪方法的具體實現過程如下。
1) 對電流原始數據進行SPSA處理
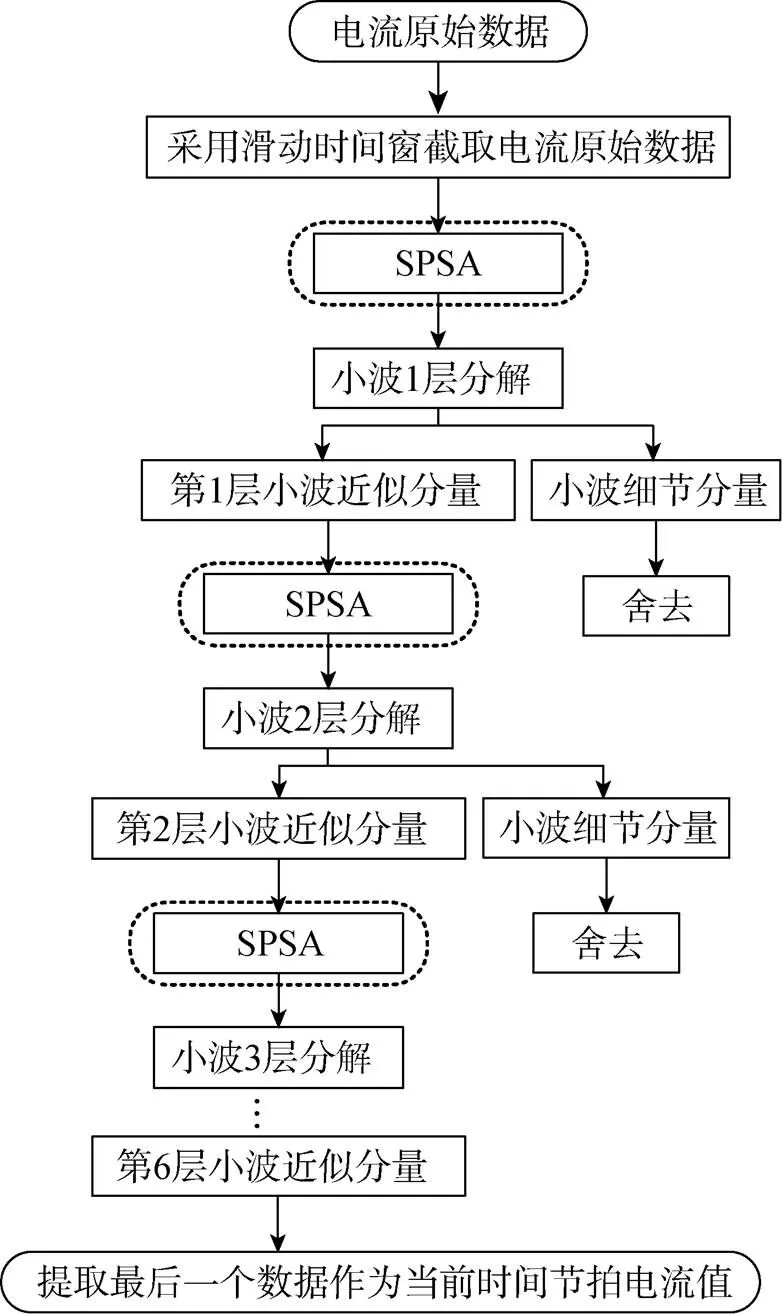
圖6 文中耦合降噪方法流程圖
電流原始數據SPSA處理過程為[18]
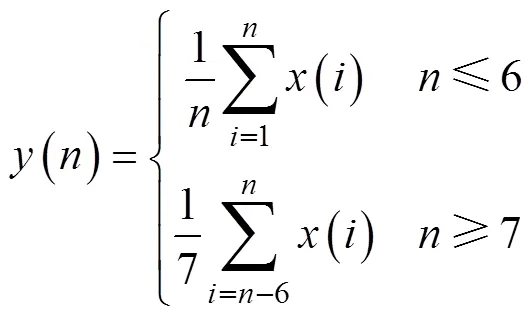
式中:()為電流原始數據;()為SPSA處理后的電流數據,為電流數據個數。
2) 對SPSA后數據進行1層WD
對()進行1層WD[16]

式中:A()為尺度系數;D()為小波系數;()為DB4尺度函數;()為DB4小波函數;為WD層數,=1; < >為內積運算符號。
3) 重構第1層小波近似分量
將尺度系數A()代入小波單支重構公式[16], 得到小波近似分量, 即
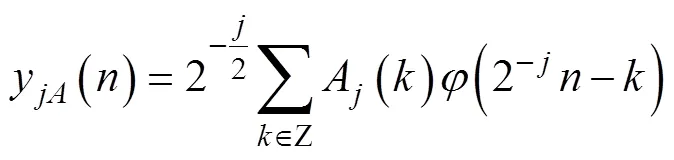
式中,=1。
4)逐層進行耦合降噪
用y()代替()代入式(1)進行SPSA處理, 將處理結果依次代入式(2)和式(3)進行WD與重構。此時, WD層數=2, 得到第2層小波近似分量。
重復上段過程, 逐次增加WD與重構層數, 直到=6, 耦合降噪后的第6層小波近似分量作為最終降噪結果。
綜上可知, SPSA與WD重構交叉耦合進行, 且小波層數逐漸增大, 可有效平滑各層小波近似分量中的傳感器自身噪聲, 減小實際電流數據和降噪后電流數據之間的誤差。
3 試驗驗證
3.1 試驗裝置
為驗證冗余接地電路、耦合降噪方法的有效性進行推進器水池試驗, 試驗裝置如圖7所示。
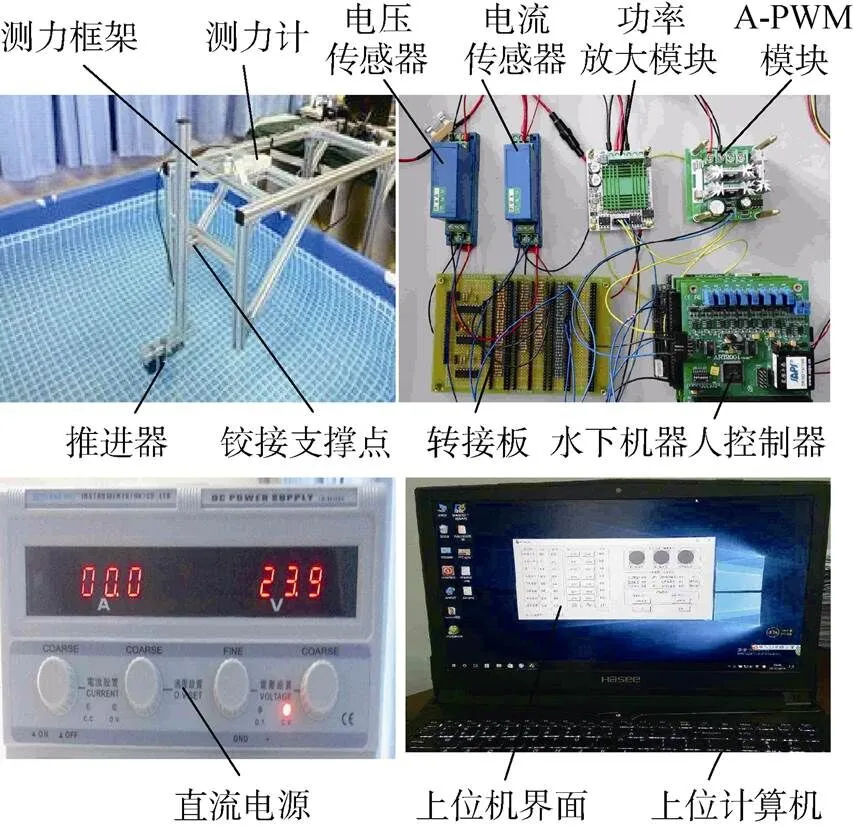
圖7 推進器控制系統和電流信號降噪試驗裝置
該試驗裝置基于圖1所示原理圖搭建, 并根據試驗需求進行了更改, 具體更改內容為: 采用數顯直流電源代替電源模塊II; 在系統中增加上位計算機, 上位機中含有上位機控制界面, 通過操作上位機控制界面向水下機器人控制器發送各個推進器的控制電壓信號。
3.2 冗余接地電路試驗驗證
試驗中, 將圖7中的各功能模塊分別按照典型串聯接地電路(如圖2所示)和冗余接地電路(如圖4所示)進行連接。利用示波器觀察功率放大模塊接收到的PWM信號, 并總結其紋波幅值和占空比波動, 其中, 最大紋波幅值用1max表示, 最大占空比波動幅值用2max表示。
試驗中, 典型串聯接地電路的1max為0.46 V, 冗余接地電路的1max為0.16 V, 與串聯電路相比降低了0.30 V(相對降低65.2%); 典型串聯接地電路的2max為0.8 μs, 冗余接地電路的2max為0.08 μs, 與串聯電路相比降低了0.72 μs(相對降低90.0%)。可以看出, 與典型串聯接地電路相比, 文中電路在減小PWM信號紋波幅值和占空比波動方面更為有效。
3.3 耦合降噪方法試驗驗證
電流信號數據獲取過程如下: 每單擊一次上位機控制界面的增速按鍵, 推進器控制電壓增加0.2 V, 手工記錄數顯直流電源所顯示的電流數據, 并將此數據作為推進器實際電流數據, 同時, 水下機器人控制器采集電流傳感器數據, 并將此作為原始電流數據發送給上位計算機進行存儲。
分別采用文中提出的耦合降噪方法、WD、SPSA、WD+SPSA、SPSA+WD降噪方法對原始電流數據進行降噪處理, 結果如圖8所示。
根據圖8所示數據, 分別計算各降噪方法的平均誤差、均方根誤差和平均相對誤差表示實際數據與原始或降噪后的數據之間的誤差[18], 結果如表1所示。其中:ME為平均誤差;RMSE為均方根誤差;MAPE為平均相對誤差。
如表1所示, 文中方法與原始數據、WD、SPSA、SPSA+WD和WD+SPSA相比,ME分別降低了0.061、0.046、0.055、0.039和0.041(相對降低62.2%、55.4%、59.8%、51.3%和52.6%);RMSE分別降低0.327、0.136、0.135、0.076和0.111(相對降低69.6%、48.7%、48.6%、34.7%和43.7%);MAPE分別降低0.154、0.076、0.086, 0.055和0.064(相對降低24.4%、13.8%、15.3%、10.4%和11.9%)。結果表明, 文中方法比原始數據、WD、SPSA、SPSA+WD和WD+SPSA具有較小的誤差。
4 結束語
文中設計了一種水下機器人推進器控制系統, 重點研究了冗余接地電路、耦合降噪方法。水下機器人推進器水池試驗結果表明: 與串聯接地電路相比, 冗余接地電路能夠有效的降低紋波幅值和占空比幅值; 與原始電流數據和WD方法相比, 利用耦合降噪方法降噪的電流數據與真實電流數據的誤差更小。

圖8 原始和降噪后的電流數據

表1 不同方法的降噪效果
冗余接地電路為主控CPU與各功能模塊的共地連接問題提供了一種有效方案, 考慮到文中只是在主控CPU與A-PWM模塊之間增加了一條冗余接地路徑, 在后續研究工作中, 可以嘗試在主控CPU與各個功能模塊之間都增加一條冗余接地路徑。推進器電流信號降噪, 本質上是電機電流信號降噪, 所以可嘗試將耦合降噪方法應用于其他領域的電機電流信號降噪場合。
[1] 黃琰, 李巖, 俞建成, 等. AUV智能化現狀與發展趨勢[J]. 機器人, 2020, 42(2): 215-231.Huang Yan, Li Yan, Yu Jian-cheng, et al. State-of-the-art and Development Trends of AUV Intelligence[J]. Robot, 2020, 42(2): 215-231.
[2] Hao L Y, Zhang H, Yue W, et al. Fault-tolerant Compensation Control Based on Sliding Mode Technique of Unmanned Marine Vehicles Subject to Unknown Persistent Ocean Disturbances[J]. International Journal of Control, Automation and Systems, 2020, 18(3): 739-752.
[3] Liu X, Zhang M J, Wang Y J, et al. Design and Experimental Validation of an Adaptive Sliding Mode Observer-based Fault-tolerant Control for Underwater Vehicles[J]. IEEE Transactions on Control Systems Technology, 2019, 27(6): 2655-2662.
[4] He J Y, Li Y, Jiang Y Q, et al. Propeller Fault Diagnosis Based on a Rank Particle Filter for Autonomous Underwater Vehicles[J]. Brodogradnja, 2018, 69(2): 147-164.
[5] Chan T K, Chin C S. Health Stages Diagnostics of Underwater Thruster Using Sound Features with Imbalanced Dataset[J]. Neural Computing & Applications, 2019, 31(10): 5767-5782.
[6] Yao F, Wang F, Zhang M. Weak Thruster Fault Detection for Autonomous Underwater Vehicle Based on Artificial Immune and Signal Pre-processing[J]. Advances in Mechanical Engineering, 2018, 10(2): 538-550.
[7] Abed W, Sharma S K, Sutton R, et al. An Unmanned Marine Vehicle Thruster Fault Diagnosis Scheme Based on OFNDA[J]. Journal of Marine Engineering and Technology, 2017, 16(1): 37-44.
[8] 程學龍, 朱大奇, 孫兵, 等. 深海載人潛水器推進器系統故障診斷的新型主元分析算法[J]. 控制理論與應用, 2018, 35(12): 1796-1804.Cheng Xue-long, Zhu Da-qi, Sun Bing, et al. Principal Component Analysis Algorithm for Fault Diagnosis of Thruster System in Deep-sea Human Occupied Vehicle[J]. Control Theory & Applications, 2018, 35(12): 1796-1804.
[9] 劉揚. 模塊電源紋波電壓的測量與有效抑制[J]. 計量與測試技術, 2018, 45(1): 52-53.Liu Yang. Measurment and Effective Suppress for Ripple Voltage of Module Power[J]. Metrology & Measurement Technique, 2018, 45(1): 52-53.
[10] 何德軍, 石曉磊. 一種直流并聯電源的輸出紋波抑制技術研究[J]. 信息技術, 2019, 43(9): 101-105.He De-jun, Shi Xiao-lei. Research on Output Ripple Suppression Technology of DC Parallel Power Supply[J]. Information Technology, 2019, 43(9): 101-105.
[11] 張國榮, 桂紅明, 彭勃, 等. 柔性多狀態開關直流側電壓紋波的抑制策略[J]. 高電壓技術, 2020, 46(4): 1133- 1141.Zhang Guo-rong, Gui Hong-ming, Peng Bo, et al. DC Side Voltage Ripple Suppression Strategy on Flexible Multi-state Switch[J]. High Voltage Engineering, 2020, 46(4): 1133-1141.
[12] 張小翠, 徐小明. 一種基于變頻器電流檢測機床刀具磨損新方法的研究[J]. 機床與液壓, 2019, 47(13): 213-218.Zhang Xiao-cui, Xu Xiao-ming. Research on New Method of Tool Wear for Machine Tool Based on Frequency Converter Current Detection[J]. Machine Tool & Hydraulics, 2019, 47(13): 213-218.
[13] 趙坤, 鄭小霞. 基于改進EMD和小波閾值法的風機數據降噪研究[J]. 上海電力大學學報, 2020, 36(2): 136-140.Zhao Kun, Zheng Xiao-xia. Noise Reduction of Wind Turbine Data Based on Improved EMD and Wavelet Threshold[J]. Journal of Shanghai University of Electric Power, 2020, 36(2): 136-140.
[14] 朱圓圓, 易挺. 粒子濾波的焊接電流信號降噪方法研究[J]. 精密制造與自動化, 2018, 1(1): 4-6.Zhu Yuan-yuan, Yi Ting. Research on Noise Reduction of Welding Current Signal Based on Particle Filter[J]. Precise Manufacturing & Automation, 2018, 1(1): 4-6.
[15] Liu H, Wang W, Xiang C, et al. A De-noising Method Using the Improved Wavelet Threshold Function Based on Noise Variance Estimation[J]. Mechanical Systems and Signal Processing, 2018, 99(15): 30-46.
[16] Zhang M, Yin B, Liu W, et al. Thruster Fault Feature Extraction for Autonomous Underwater Vehicle in Time-varying Ocean Currents Based on Single-channel Blind Source Separation[J]. Proceedings of the Institution of Mechanical Engineers Part I: Journal of Systems and Control Engineering, 2016, 230(1): 46-57.
[17] 殷寶吉, 董亞鵬, 唐文獻, 等. 船舶螺旋槳水下清洗機器人推進器驅動及關鍵部件狀態監測研究[J]. 江蘇科技大學學報(自然科學版), 2019, 33(4): 31-37.Yin Bao-ji, Dong Ya-peng, Tang Wen-xian, et al. Research on Thruster Driving and Key Parts Condition Monitoring for Ship Propeller Underwater Cleaning Vehicle[J]. Journal of Jiangsu University of Science and Technology(Natural Science Edition), 2019, 33(4): 31-37.
[18] 申中杰, 陳雪峰, 何正嘉, 等. 基于相對特征和多變量支持向量機的滾動軸承剩余壽命預測[J]. 機械工程學報, 2013, 49(2): 183-189.Shen Zhong-jie, Chen Xue-feng, He Zheng-jia, et al. Remaining Life Predictions of Rolling Bearing Based on Relative Features and Multivariable Support Vector Machine[J]. Journal of Mechanical Engineering, 2013, 49(2): 183-189.
Denoising Method for the Pulse Width Modulation Signal and Current Signal in the Control System of Underwater Robot Thruster
YIN Bao-ji1,2,3, ZHOU Jia-hui1,2, TANG Wen-xian1,2, DONG Ya-peng1,2
(1. School of Mechanical Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China; 2. Jiangsu Provincial Key Laboratory of Advanced Manufacture and Process for Marine Mechanical Equipment, Jiangsu University of Science and Technology, Zhenjiang 212003, China; 3. Science and Technology on Underwater Vehicle Technology, Harbin Engineering University, Harbin 150001, China)
With the aim of achieving thruster control and monitoring this control under operating conditions, a denoising method for the pulse width modulation(PWM) signal and current signal in the control system of underwater robot thruster is explored in this study. The ripple amplitude and duty cycle fluctuation of the PWM signal are large in a thruster control circuit based on typical series grounding. Therefore, to reduce the ripple amplitude and duty cycle fluctuation, a redundant grounding circuit is designed, in which an extra ground wire is added between the central processing unit(CPU) and the module converting analog voltage to PWM to avoid the interference of the ground signal of the power. However, the error between the denoised current data and the actual data has a large magnitude even after the current data is denoised using the wavelet decomposition method. Hence, to further denoise the current data, a coupling denoising method based on the cross coupling of wavelet decomposition and seven-point slip average is proposed. The water-tank experimental results obtained are as follows: The designed redundant grounding circuit has a smaller ripple amplitude and duty cycle fluctuation than those of the series grounding circuit. The proposed coupling denoising method has a smaller error between the denoised current data and the actual data when compared with that between the raw data and the denoised data as obtained via the wavelet decomposition. The effectiveness of the abovementioned methods is therefore verified by the experimental results.
underwater robot; thruster; control circuit; pulse width modulation(PWM) signal; current signal; denoising
TP273.2; TN911.7
A
2096-3920(2021)02-0196-07
10.11993/j.issn.2096-3920.2021.02.010
殷寶吉, 周佳惠, 唐文獻, 等. 水下機器人推進器控制系統PWM及電流信號降噪方法[J]. 水下無人系統學報, 2021, 29(2): 196-202.
2020-04-27;
2020-07-02.
江蘇省自然科學基金資助項目(BK20190964); 江蘇省高校自然科學基金資助項目(19KJB510003); 水下機器人技術重點試驗室研究基金資助項目(6142215180306).
殷寶吉(1987-), 男, 博士, 講師, 主要研究方向為水下機器人故障診斷.
(責任編輯: 許 妍)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
