用于單矢量水聽器方位估計的加權直方圖法
2021-05-15 08:41:38張小勇張國軍尚珍珍王帥
水下無人系統學報 2021年2期
張小勇,張國軍,尚珍珍,王帥
用于單矢量水聽器方位估計的加權直方圖法
張小勇1, 2, 張國軍1, 尚珍珍1,王 帥2
(1. 中北大學 動態測試省部共建實驗室, 山西 太原, 030051; 2. 太原學院 計算機科學與工程系, 山西 太原, 030032)
在水下無人系統中使用矢量水聽器進行聲源方位估計具有較大的優勢, 采用加權直方圖法可以利用單個矢量水聽器實現方位估計, 且計算量較小。文中分析了聲能流檢測器的原理, 由聲能流可以獲得平面內聲能量的分布情況, 為加權直方圖法提供了理論基礎。通過分析發現: 在低信噪比下, 聲源的能量擴展到了真實方位之外, 使得加權直方圖法的統計間隔會分割聲源能量, 從而出現方位估計誤差。針對這一問題, 提出了改進的基于能量搜索的加權直方圖法, 該算法采用滑動窗口法尋找聲源所在區間, 并利用重心法獲得區間內的能量中心即方位估計的結果。通過仿真證明: 改進后的算法在統計間隔為10°, 信噪比為-10~10 dB時, 均比原算法具有更好的性能, 其均方根誤差平均減小43.7%, 且在多目標(干擾)環境下的方位估計結果也更準確。文中研究可為有效改進單矢量水聽器方位估計算法提供參考。
水下無人系統; 矢量水聽器; 方位估計; 加權直方圖; 滑動窗口法; 重心法
0 引言
水聽器可有效感知水聲信號, 被廣泛應用于水下無人系統聲源方位估計中。在無人水下航行器、潛標等設備布放空間嚴格受限的水下無人系統中, 標量水聽器陣列因為體積較大, 使用受到了極大限制[1]。矢量水聽器具有共點測量聲壓與聲矢量的特點[2], 采用加權直方圖法可以利用單個矢量水聽器實現聲源目標方位估計[3]。近年來出現的微機電系統(micro-electro-mechanical system, MEMS)矢量水聽器兼具性能好、體積小及功耗低等優點[4]。因此, 在水下無人系統中使用矢量水聽器進行方位估計具有較大的優勢, 對單矢量水聽器方位估計算法的研究具有重要意義。
近年來, 國內外學者對單矢量水聽器方位估計領域展開了諸多研究。Nehorai[5]提出用于單矢量水聽器方位估計的復聲強法, 對算法的性能進行了分析, 給出了理論誤差的計算方法; 孫貴青等[6]證明了在各向同性噪聲場中聲能流是極大似然檢測, 聲能流方向是聲源方位的極大似然估計, 并給出了這種估計方法的克拉美羅界; 姚直象等[7]在復聲強法的基礎上, 提出直方圖與加權直方圖方位估計算法, 給出了信號處理流程, 并指出加權直方圖法適用于聲源包含線譜與寬帶信號的情況, 而這種信號更接近現實中艦艇產生的信號。除此以外還有大量波束形成、子空間類算法研究, 這些算法的理論精度較好, 但計算復雜度較高[8], 不利于在水下無人系統中的使用。
矢量水聽器在水下無人系統中使用時, 要考慮其所搭載系統的姿態變化與自身運動對測量結果的影響, 使用姿態傳感器、加速度傳感器等配合三維矢量水聽器及相關算法, 可以對上述因素所造成的誤差進行修正[9]。文中討論了在遠場平面波場中使用二維矢量水聽器(矢量輸出為振速)且其姿態水平的情形, 對用于單矢量水聽器方位估計的加權直方圖法的原理做了進一步研究, 分析了該算法存在的問題, 在此基礎上提出了改進的基于能量搜索的加權直方圖法, 并與原算法進行了仿真對比, 對理論進行了驗證。
1 聲能流檢測器原理


將式(1)更換積分順序可得
式中, 聲能流檢測器輸出可視為對各個向上的聲能流密度進行時域積分后得到每個角度對應的聲能量, 再對所有角度上的能量積分。即: 聲能流檢測器的輸出是與各角度的聲能量之和正相關的量。
將式(2)變換到頻域, 得

二維矢量水聽器并不能直接輸出聲能流矢量, 它的3個輸出量()、v()和v()分別為聲壓及振速的2個相互垂直分量的模, 聲能流的模為[10]

聲能流的方向可由下式獲得, 該結果是對聲源方位角的極大似然估計

將式(4)和式(5)變換到頻域時, 便可得式(3)所需各頻率的聲能量與方位。在各向同性高斯噪聲場中, 聲能流檢測器的輸出也可寫為
其中
由式(8)可知, 聲源與噪聲不相關時, 矢量聲能流檢測器能夠抵消各向同性噪聲的干擾, 使得檢測器在噪聲干擾下依然能夠分辨聲源的聲能流信號。
2 加權直方圖方位估計算法
應用于單矢量水聽器的加權直方圖法的信號處理流程框圖如圖1所示。
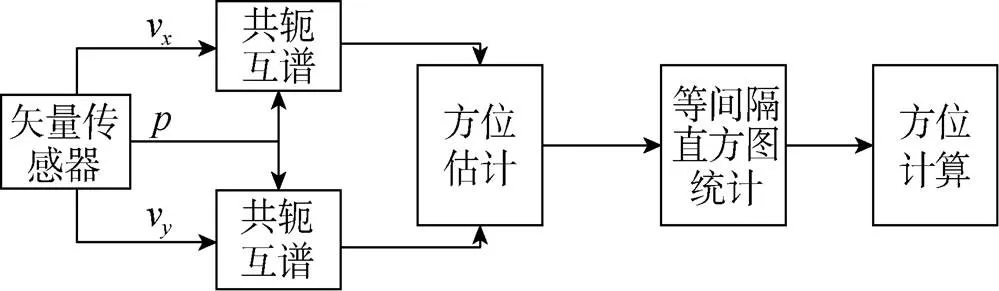
圖1 加權直方圖法信號處理流程框圖
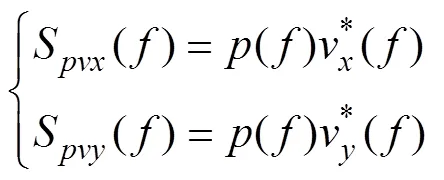
在海洋信道中, 近似滿足聲學歐姆定律, 聲壓與振速同相位, 根據傅里葉變換的基本特性, 2個同相位輸入的能量集中在互譜的實部[12]。因此, 對式(9)的運算結果取實部便得到各頻率的聲能流分量()和I(), 將式(4)和式(5)變換到頻域, 得到各頻率的聲能流模為
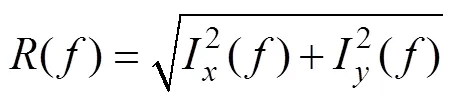
各頻率聲源的方位估計值為

由式(8)可知, 在存在各向同性噪聲時, 依然可在聲源方位上獲得較大的能量值, 從而在加權直方圖中形成1個峰值。在加權直方圖法中, 使用較小的統計間隔, 峰值所對應的角度即聲源方位估計結果, 其分辨率取決于統計間隔的值, 例如: 統計間隔取1°時, 所獲結果的置信區間為1°。
3 改進的加權直方圖法
3.1 算法原理
由第2章可知, 使用加權直方圖法對聲源方位進行估計, 本質上是尋找聲源能量所在方位。在低信噪比下使用加權直方圖法對聲能量的分布情況進行仿真, 仿真條件為: 信噪比0 dB, 噪聲為與聲源不相關的高斯噪聲, 采樣率4 kHz, 采樣時間1 s, 聲源為連續譜寬帶信號(10~500 Hz), 方位為20°。仿真得到的聲能量分布如圖2所示。

圖2 信噪比為0 dB時聲能量分布圖
由圖2可知, 信噪比較低時, 在聲源方位附近形成了1個峰, 但聲源能量在真實方位之外較大的范圍內均存在, 且分布圖上的峰值不一定是真實方位。這種情況下使用加權直方圖法, 在較小的統計間隔下, 必然造成聲源能量被分割在不同的統計間隔中, 真實方位所在統計間隔的能量不一定是最大的, 從而引起方位估計誤差。為避免這種情況, 文中提出一種改進的基于能量搜索的加權直方圖法, 其信號處理流程如圖3所示。
圖3 改進算法信號處理流程框圖

然后, 進一步在這一區間中確定聲源的方位。由于已經獲得了能量的分布情況, 這里使用能量重心法計算能量中心所在位置, 并以此位置作為方位估計結果。能量重心法基于對稱窗函數功率譜的能量重心特性, 在得到聲源所在的統計間隔后, 將該區間的各個角度及其對應的聲能流值代入下式即得到目標方位角[15]

3.2 實驗與結果分析
均方根誤差用來衡量觀測值與真實值之間的偏差, 能夠很好地反映出測量的準確度, 其值是測量值與真實值偏差的平方和與觀測次數比值的平方根。文中采用均方根誤差這一指標對算法的性能進行驗證與分析。
為了驗證統計間隔對改進算法的影響, 進行如下仿真。仿真條件為: 信噪比0 dB, 噪聲為與聲源不相關的高斯噪聲, 采樣率4 kHz, 采樣時間1 s, 聲源為連續譜寬帶信號(10~500 Hz), 方位20°, 統計間隔由1°~10°, 滑動步距0.1°。仿真次數1 000次, 仿真結果如圖4所示。
由仿真結果可知, 方位估計結果的均方根誤差隨著統計間隔的增加而減小, 在10°附近均得到較小的值, 且基本達到穩定。這表明: 隨著統計間隔的增加, 被測聲源能量更多的被納入統計間隔之中時, 增大了方位估計的準確性, 從而有效判斷區間內能量中心的所在位置。
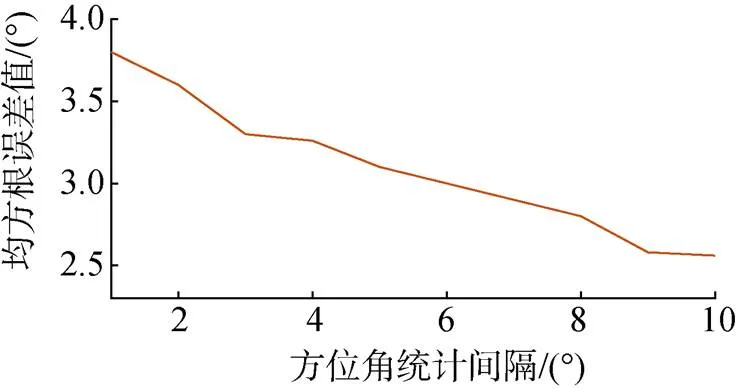
圖4 不同統計間隔下的仿真結果
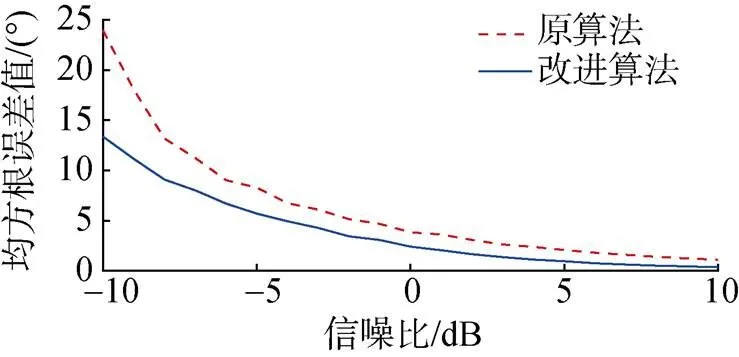
圖5 不同信噪比下的仿真結果Fig. 5 Simulation results under different SNRs
由仿真結果可知: 當信噪比為–10~10 dB時, 2種算法的方位估計結果均隨著信噪比的增加而改善, 改進算法的估計結果在各個信噪比均優于原算法; 均方根誤差平均減小了43.7%, 這表明所獲數據的準確性有所提高。
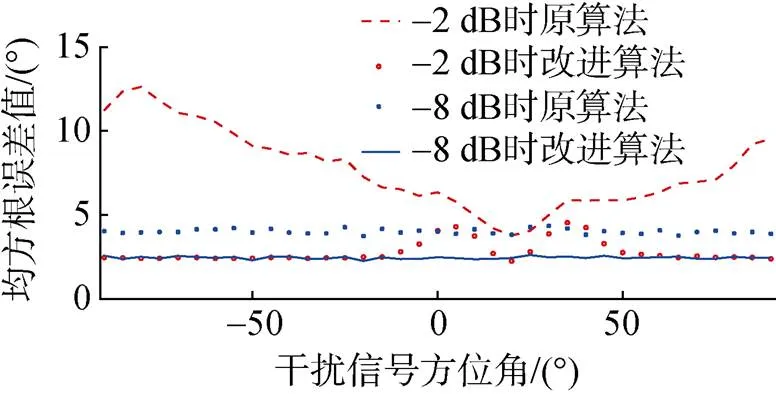
圖6 干擾信號與目標頻帶不同時的仿真結果
其他條件不變的情況下, 在干擾信號為連續譜寬帶信號(10~500 Hz), 即與目標聲源頻帶相同時進行仿真, 各條件下的仿真次數均為1 000次。仿真結果如圖7所示。
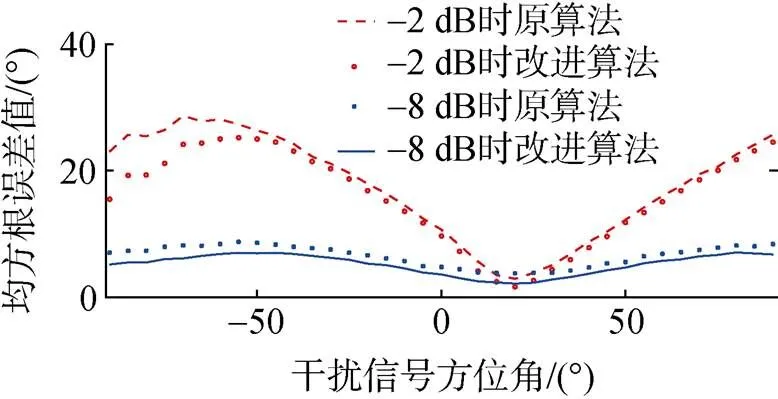
圖7 干擾信號與目標頻帶相同時的仿真結果
4 結束語
[1] 申輝. 基于纖毛式納機電矢量水聽器的潛標系統設計與實現[D]. 太原: 中北大學, 2015.
[2] Zhang G P, Zheng C, Lin W S, et al. Steering Acoustic Intensity Estimator Using a Single Acoustic Vector Hydrophone[J]. Journal of sensors, 2018(3): 1-10.
[3] Anbang Z, Lin M, Juan H, et al. Open-Lake Experimental Investigation of Azimuth Angle Estimation Using a Single Acoustic Vector Sensor[J]. Journal of Sensors, 2018(3): 1-11.
[4] Zhang X Y, Xu Q D, Zhang G J, et al. Design and Analysis of a Multiple Sensor Units Vector Hydrophone[J]. Aip Advances, 2018(8): 085124.
[5] Nehoral A. Acoustic Vector Sensor Array Processing[J]. IEEE Trans.Signal Processing, 1994(9): 2481-2491.
[6] 孫貴青, 楊德森, 張攬月, 等. 基于矢量水聽器的最大似然比檢測和最大似然方位估計[J]. 聲學學報, 2003, 28(1): 66-72.Sun Gui-qin, Yang De-sen, Zhang Lan-yue, et al. Maximum Likelihood Ratio Detection and Maximum Likelihood DOA Estimation Based on the Vector Hydrophone[J]. Acta Acustica, 2013, 28(1): 66-72.
[7] 姚直象, 惠俊英, 殷敬偉, 等. 基于單矢量水聽器四種方位估計方法[J]. 海洋工程, 2006, 24(1): 122-127.Yao Zhi-xiang, Hui Jun-yin, Yin Jin-wei, et al. Four Approaches to DOA Estimation Based on a Single Vector Hy- drophone[J]. The Ocean Engineering, 2006, 24(1): 122-127.
[8] 曾雄飛, 孫貴青, 李宇, 等. 單矢量水聽器的幾種DOA估計方法[J]. 儀器儀表學報, 2012, 33(3): 499-507.Zeng Xiong-fei, Sun Gui-qin, Li Yu, et al. Several Approaches of DOA Estimation for Single Vector Hydrophone[J]. Chinese Journal of Scientific Instrument, 2012, 33(3): 499-507.
[9] 孫芹東. 一種新型姿態實時修正矢量水聽器的設計[C]// 中國聲學學會水聲學分會2015年學術會議論文集. 武漢: 中國聲學學會水聲學分會, 2015.
[10] 楊德森, 洪連進. 矢量水聽器原理及應用引論[M]. 北京: 科學出版社, 2009.
[11] 李春旭, 王逸林, 梁國龍. 平均聲強器性能分析[C]//中國聲學學會1999年青年學術會議論文集. 武漢: 中國聲學學會, 1999.
[12] 姚直象, 惠俊英, 蔡平, 等. 單矢量水聽器方位估計的柱狀圖方法[J]. 應用聲學, 2006, 25(3): 161-167.Yao Zhi-xiang, Hui Jun-yin, Cai Pin, et al. A Histogram Approach of the Azimuth Angle Estimation Using a Single Vector Hydrophone[J]. Applied Acoustics, 2006, 25(3): 161-167.
[13] 彭策. 單矢量水聽器被動定位方法研究[D]. 哈爾濱: 哈爾濱工程大學, 2014.
[14] 吳鵬, 趙風海, 黃洋. 一種結合線性預測倒譜法和組合滑動窗口平滑法的基音周期估計改進算法[J]. 南開大學學報(自然科學版), 2019, 52(2): 29-33.Wu Peng, Zhao Feng-hai, Huang Yang. An Improved Pitch Period Estimation Cepstrum Algorithm Combined Linear Prediction and Sliding Window Smoothing[J]. Acta Sci- entiarum Naturalium Universitatis Nankaiensis(Natural Science Edition), 2019, 52(2): 29-33.
[15] 陳平, 王佳昌, 吳興研. 能量重心法的改進FFT算法分析及應用研究[J]. 機械科學與技術, 2018, 37(12): 1883-1889.Chen Ping, Wang Jia-chang, Wu Xing-yan. Analysis and Application of an Improved FFT Algorithm for Energy Centrobaric Correction Method[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(12): 1883-1889.
[16] 惠俊英, 惠娟. 矢量聲信號處理技術[M]. 北京: 北京國防工業出版社, 2004.
Weighted Histogram Method for DOA Estimation Using Single Vector Hydrophone
ZHANG Xiao-yong1, 2, ZHAGN Guo-jun1, SHANG Zhen-zhen1, WANG Shuai2
(1. State Key Laboratory of Dynamic Testing Technology, North University of China, Taiyuan 030051, China; 2. Department of Computer Science and Engineering, Taiyuan University, Taiyuan 030032, China)
unmanned undersea system; vector hydrophone; direction of arrival(DOA) estimation; weighted histogram; slide window method; gravity center method
TJ630.34; TB566
A
2096-3920(2021)02-0164-06
10.11993/j.issn.2096-3920.2021.02.005
張小勇, 張國軍, 尚珍珍, 等. 用于單矢量水聽器方位估計的加權直方圖法[J]. 水下無人系統學報, 2021, 29 (2): 164-169.
2020-04-27;
2020-07-30.
國家自然科學基金項目資助(61525107, 61727806).
張小勇(1982-), 男, 在讀博士, 副教授, 主要研究方向為矢量水聽器及其信號處理.
(責任編輯: 楊力軍)
