采動影響下巷道圍巖變形破壞規(guī)律
2021-05-14 06:49:44郭良林周大偉張德民周寶慧
采礦與巖層控制工程學報 2021年2期
郭良林,周大偉,張德民,周寶慧
1. 中國礦業(yè)大學 環(huán)境與測繪學院,江蘇 徐州 221116;2. 中國礦業(yè)大學 江蘇省資源環(huán)境信息工程重點實驗室,江蘇 徐州 221116;3. 新能礦業(yè)有限公司,內(nèi)蒙古 鄂爾多斯 017000 )
煤炭資源的開采和利用極大地推動了國民經(jīng)濟的發(fā)展[1-4]。煤炭開采過程中,巷道圍巖變形破壞嚴重、支護體失效頻繁,冒頂、片幫等事故時有發(fā)生,影響煤炭開采工作正常進行[5-7]。準確地監(jiān)測巷道圍巖變形以及揭示巷道圍巖變形規(guī)律,對于巷道的正常使用和安全開采具有重要意義。諸多學者針對井下巷道變形機理及控制進行了廣泛研究,通過多種手段進行巷道圍巖變形值的獲取,如全站儀、鉆孔應(yīng)力計、數(shù)顯收斂計等僅會在巷道的幾個特殊位置布設(shè)應(yīng)力計,屬于“點狀”觀測數(shù)據(jù),不能獲得巷道整體的監(jiān)測數(shù)據(jù),以有限的點位變化規(guī)律來反映被監(jiān)測對象整體變形情況的監(jiān)測方式誤差較大。
三維激光掃描技術(shù)又被稱為實景復(fù)制技術(shù),是測繪領(lǐng)域內(nèi)繼GP S技術(shù)之后的又一次技術(shù)革命[8]。在井下巷道變形監(jiān)測應(yīng)用領(lǐng)域,KAJ Z AR V等[9-10]研究了Leica C10在金屬礦山巷道中的應(yīng)用效果,證實了該技術(shù)用于礦山巷道監(jiān)測中的可能性,采用三維激光掃描儀對煤礦巷道和煤柱進行監(jiān)測,得出圍巖的收斂數(shù)據(jù)及煤柱的穩(wěn)定性情況;劉曉陽等[11]利用三維激光掃描對煤礦巷道頂板穩(wěn)定性進行了監(jiān)測,通過多期數(shù)據(jù)對比得出頂?shù)装宓淖冃沃担炞C了該項技術(shù)用于頂板穩(wěn)定性監(jiān)測的可行性;江權(quán)等[12]通過三維激光掃描技術(shù)、鉆孔攝像觀測、位移計等多種方式,在金川二礦深部巖體大變形時,獲取了巷道圍巖位移數(shù)據(jù),揭示了深部巷道表面變形特點和破壞方式的新特征;JIANG Q等[13]提出基于三維激光掃描和點云數(shù)據(jù)處理算法巷道三維變形測量技術(shù),并應(yīng)用該技術(shù)對深埋巷道圍巖進行監(jiān)測,得出巷道變形四維時空的演化過程。
本文為探究工作面采動影響下巷道頂板受破壞的程度,結(jié)合上述學者研究思路與技術(shù)方法,通過三維激光掃描技術(shù),以監(jiān)測巷道頂板變形為主,分析巷道頂板變形規(guī)律和支護方案的支護效果。
1 工程背景
新能礦業(yè)有限公司王家塔煤礦位于內(nèi)蒙古自治區(qū)鄂爾多斯市,礦井核定生產(chǎn)能力為800萬t/a。東邊為101工作面,于2016年初開采完畢,西邊為202工作面暫未開采,輔助運輸巷位于201工作面西側(cè),平面位置如圖1所示。

圖1 輔助運輸巷與工作面位置 Fig. 1 Position of auxiliary transport roadway and working face
輔助運輸巷支護方案為錨網(wǎng)索梁聯(lián)合支護,如圖2所示。頂部錨桿采用φ 20 mm×2 400 mm左旋無縱筋錨桿,間排距1 000 mm×900 mm,每孔2卷樹脂藥卷。幫部錨桿采用φ 20 mm×1 800 mm錨桿,間排距900 mm×900 mm,每孔1卷樹脂藥卷。①,⑦號錨索為φ 22 mm×10 000 mm鋼絞線,間排距2 000 mm;③,⑤號錨索為φ 20 mm×10 000 mm鋼絞線,間排距1 000 mm;④號錨索為φ17.8 mm×7 300 mm鋼絞線+4.5 m 鋼帶,間排距2 000 mm;②,⑥號錨索為φ 22 mm×10 000 mm 鋼 絞 線+4.5 m 鋼 帶,間 排 距2 000 mm。鋼筋梯子梁采用φ 12 mm鋼筋焊制,金屬網(wǎng)采用φ 6.5 mm鋼筋焊制,網(wǎng)格為100 mm×100 mm,搭接100 mm,地板硬化厚度200 mm,混凝土強度C30,噴射混凝土75 mm,強度C20。
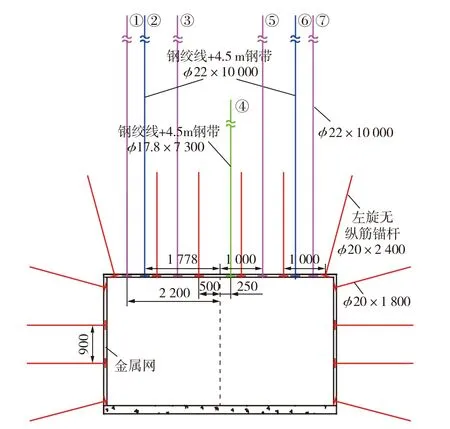
圖2 巷道支護斷面設(shè)計方案 Fig. 2 S cheme of roadway support section
201工作面平均走向長度為1 252 m,傾向長度為260 m,采厚為3.26 m,采深為200 m,煤層傾角為2°。煤層以暗煤為主,屬于半暗淡型煤。根據(jù)相鄰巷道已經(jīng)揭露的實際資料和鉆孔資料來看,本工作面區(qū)域內(nèi)的煤層結(jié)構(gòu)較簡單,沉積穩(wěn)定,屬穩(wěn)定型煤層。模型影響邊界范圍選取300 m,模型尺寸為900 m×1 800 m×200 m,模型巷道部分加密網(wǎng)格為0.5 m,其他區(qū)域網(wǎng)格1~10 m不等。巖石物理力學參數(shù)見表1。
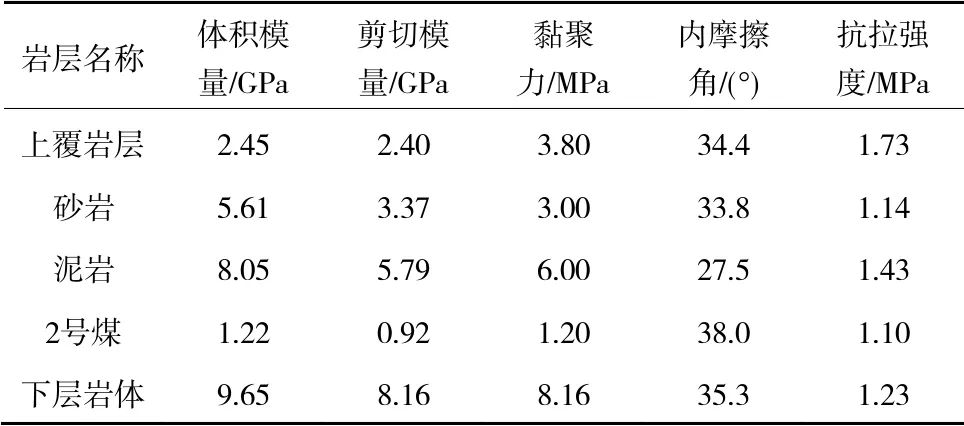
表1 巖石物理力學參數(shù) Table 1 Physical and mechanical parameters of rock
通過圖3,巷道未支護下ZZ軸方向上的應(yīng)力云圖,顯示巷道頂板和底板應(yīng)力集中區(qū)較兩幫嚴重,頂?shù)装鍛?yīng)重點支護。在巷道支護后,巷道兩幫和頂?shù)撞繎?yīng)力值得到明顯改善,支護效果明顯。
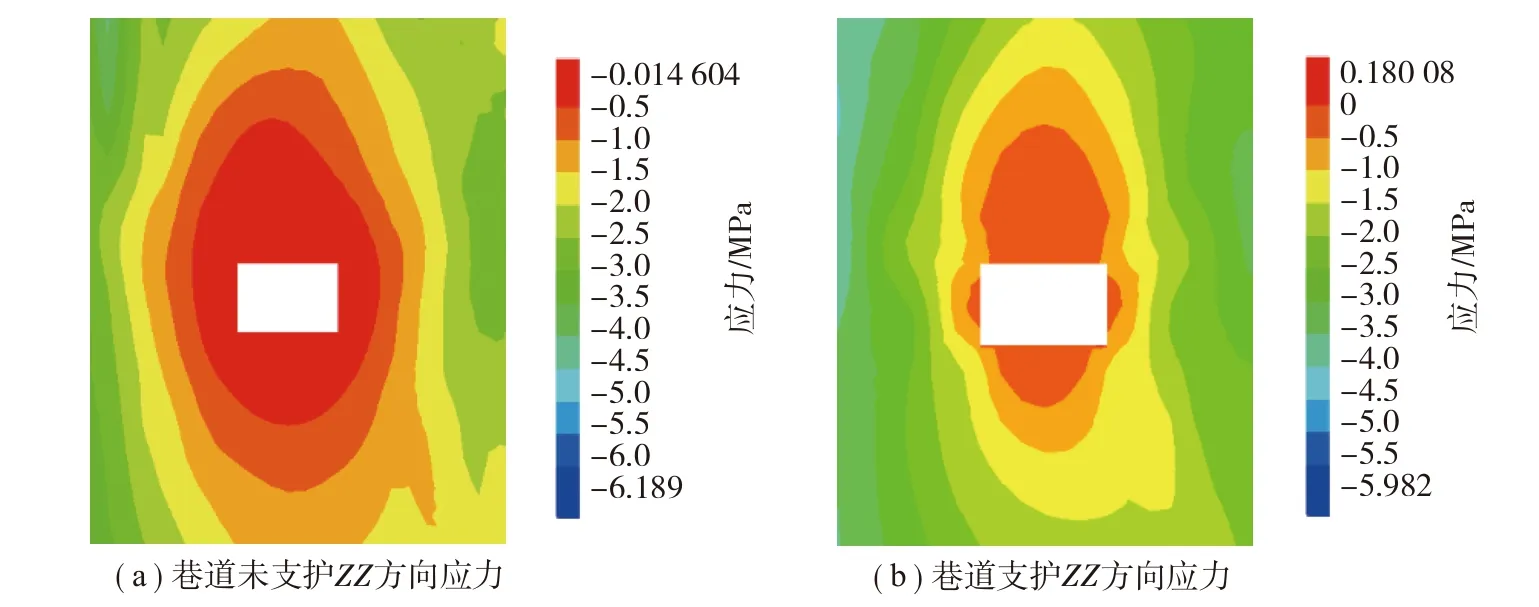
圖3 巷道斷面應(yīng)力云圖 Fig. 3 S tress diagram of roadway section
2 三維激光掃描原理與方案設(shè)計
2.1 三維激光掃描原理
三維激光技術(shù)獲取目標物體表面的三維坐標是基于三維直角坐標系的,激光束從坐標原點處發(fā)出,橫向掃描沿著X,Y軸方向,豎直掃描沿著Z軸方向[14]。計時器記錄下激光往返于三維激光掃描儀和目標物體表面的時間,根據(jù)該時間可計算出目標物體表面各點和掃描儀之間的距離S,掃描儀發(fā)射的瞬時激光的水平角和垂直角則由儀器內(nèi)精密時鐘控制編碼器進行記錄,根據(jù)式( 1 )即可得到每個點的三維坐標( X,Y,Z )。
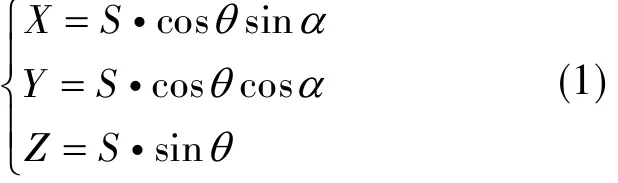
式中,S為掃描儀與物體之間的距離,m;θ為掃描儀與物體之間的豎直角度,( ° );α為掃描儀與物體之間的水平角度,( ° )。
2.2 巷道掃描監(jiān)測方案
三維激光掃描技術(shù)具有快速、海量、動態(tài)、高精度等技術(shù)特點[15],為了獲取巷道三維點云數(shù)據(jù),沿煤層推進方向共布設(shè)4個測站點,分別為Q5,2F,K1,K2,相鄰兩測站間平均距離約為200 m,同時在巷道圍巖兩幫及頂板布設(shè)反射片,用于后期點云同名特征點拼接。
測站點大地坐標采用全站儀觀測,觀測具體坐標信息見表2。

表2 巷道測站點坐標 Table 2 Coordinate of roadway stations
3 點云數(shù)據(jù)處理
3.1 點云密度分析
掃描數(shù)據(jù)密度直接影響形變值提取的準確性。在三維激光掃描應(yīng)用于隧道巷道等工程時,儀器的俯仰角度和參數(shù)設(shè)置、站點間距以及掃描儀工作環(huán)境等因素直接影響點云的最終掃描密度。本節(jié)取第1次觀測數(shù)據(jù)即6月份觀測數(shù)據(jù)進行點云密度分析,通過截取等規(guī)格斷面讀取點云斷面數(shù)量的方法判斷點云密度隨掃描距離的變化趨勢,數(shù)量變化曲線如圖4所示。
圖4中曲線呈急速下降趨勢,掃描距離為40 m時點云數(shù)量趨近于0,有效掃描距離減少嚴重。
通過上述點云密度分析,在本次巷道掃描方案中,相鄰測站距離過大,在實際掃描過程中巷道內(nèi)空氣附著的水汽是影響掃描距離的主要因素之一。煤礦井巷內(nèi)滲水是常見情況,因此建議在類似井巷工程現(xiàn)場掃描實測中,相鄰測站點間距不宜超過50 m,儀器垂直掃描范圍為30°~130°,水平掃描范圍為0°~360°。

圖4 點云數(shù)量變化曲線 Fig. 4 Curve of point cloud quantity
為了保證形變值提取的準確性,下文僅取有效掃描區(qū)域數(shù)據(jù)進行分析。李臣[16-17]等指出煤層開采后,采空區(qū)周邊形成支承壓力帶減壓區(qū)、增壓區(qū)、穩(wěn)壓區(qū),近采空區(qū)附近圍巖處于高偏應(yīng)力狀態(tài)。巷道2F測站距離開切眼最近,位置處在減壓區(qū),若支護體失效,則該位置很大概率會出現(xiàn)大變形。因此采用有效掃描區(qū)域內(nèi)監(jiān)測數(shù)據(jù)仍能作為判斷支護方案強度和頂板穩(wěn)定性的依據(jù)。各測站有效監(jiān)測區(qū)域示意如圖5所示。

圖5 巷道有效掃描區(qū)域 Fig. 5 Effective scanning area of roadway
3.2 點云配準
點云配準首先將各測站點云拼接為一個整體,然后進行坐標轉(zhuǎn)換,將工程坐標系轉(zhuǎn)換為大地坐標系。點云的拼接方法主要為同名點拼接,通過ICP迭代算法達到精度更高的目的[18]。由于本次重疊部分點云密度較低,因此利用同名拼接整體精度為18.4 mm,在經(jīng)過ICP多次迭代之后精度仍未提高,在掃描重疊區(qū)域點云密度低的情況下,ICP迭代算法不再適用。
基于上述分析本文利用不同掃描時段相同位置掃描點云進行配準,此時配準誤差僅包括儀器測量誤差和儀器高程量取誤差以及點云旋轉(zhuǎn)角誤差。本次工程掃描采用RIGEL V Z1000儀器,其標稱精度為測距2 mm/100 m,測角16″,儀器高量取誤差通常取1.5 mm,旋轉(zhuǎn)角誤差由巷道邊界擬合確定,當取巷道長度為70 m時,旋轉(zhuǎn)角誤差可以忽略不計,掃描精度滿足巷道變形監(jiān)測要求。
3.3 點云濾波
巷道掃描數(shù)據(jù)中存在大量噪點,如建筑支架、鐵桶、工作人員以及錨桿支護末端等。上述因素不僅影響了建模的精確度,同時干擾后期形變提取工作。因此,必須刪除掃描數(shù)據(jù)中的噪點,以確保監(jiān)測結(jié)果不受影響。
盧小平等[19-20]先對掃描隧道數(shù)據(jù)進行斷面分割,擬合斷面曲線,獲取隧道軸線位置,設(shè)置閾值范圍,除去隧道掃描數(shù)據(jù)噪點。隧道斷面形狀規(guī)則,斷面擬合精度高。對于本次工程井下巷道,巷道斷面不規(guī)則,擬合斷面精度較低,所以上述點云濾波方法不再適用。因此本文提出1種針對不規(guī)則矩形巷道的點云濾波方法。首先將巷道掃描數(shù)據(jù)進行切割,分為頂板、左幫、右?guī)汀⒌装澹謩觿h除噪聲明顯的干擾點云,然后對切割點云構(gòu)建邊長較大的不規(guī)則三角網(wǎng),設(shè)置高程方向上閾值,通過三角網(wǎng)與初始點云進行面比較,提取出閾值之外的點云數(shù)據(jù)。調(diào)整三角網(wǎng)邊長范圍和面比較閾值迭代多次,除去附著在巷道頂板上的支護末端噪點。巷道頂板點云濾波效果如圖6所示。其中紅色點云為所設(shè)閾值之外的噪點。

圖6 點云頂板濾波 Fig. 6 Point cloud roof filtering
3.4 頂板變形規(guī)律
通過上述掃描數(shù)據(jù)處理后,以第1次201工作面未開采時所采集數(shù)據(jù)為初始值,與后3期采集數(shù)據(jù)對比,提取3期頂板的相對變形值,為保證點云提取變形過程中避免點位偏移問題,因此頂板提取變形和表達均采用工程坐標系,各監(jiān)測區(qū)域內(nèi)頂板變形云圖如圖7所示。4次現(xiàn)場掃描監(jiān)測時間以及201工作面推進信息見表3。
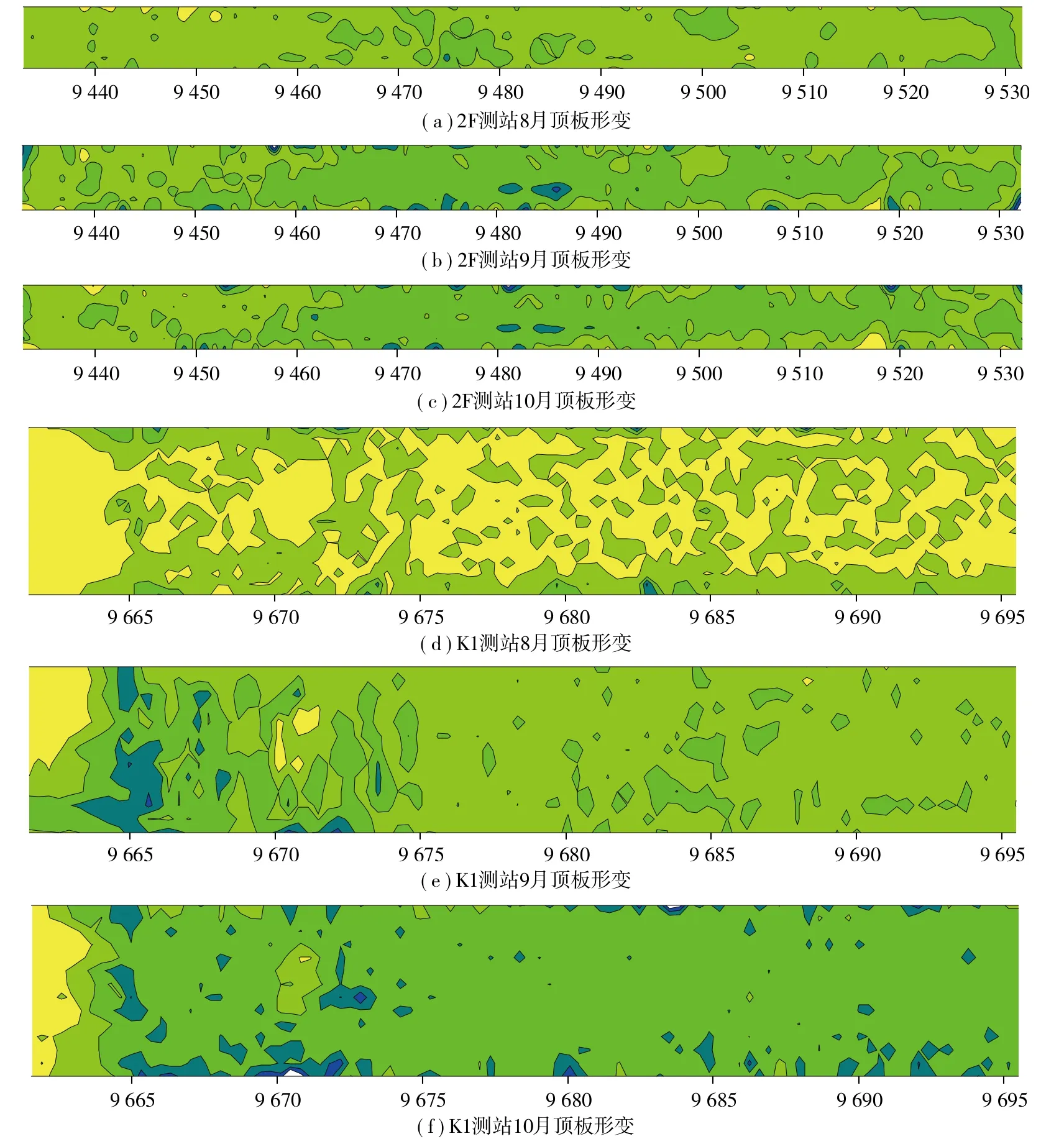
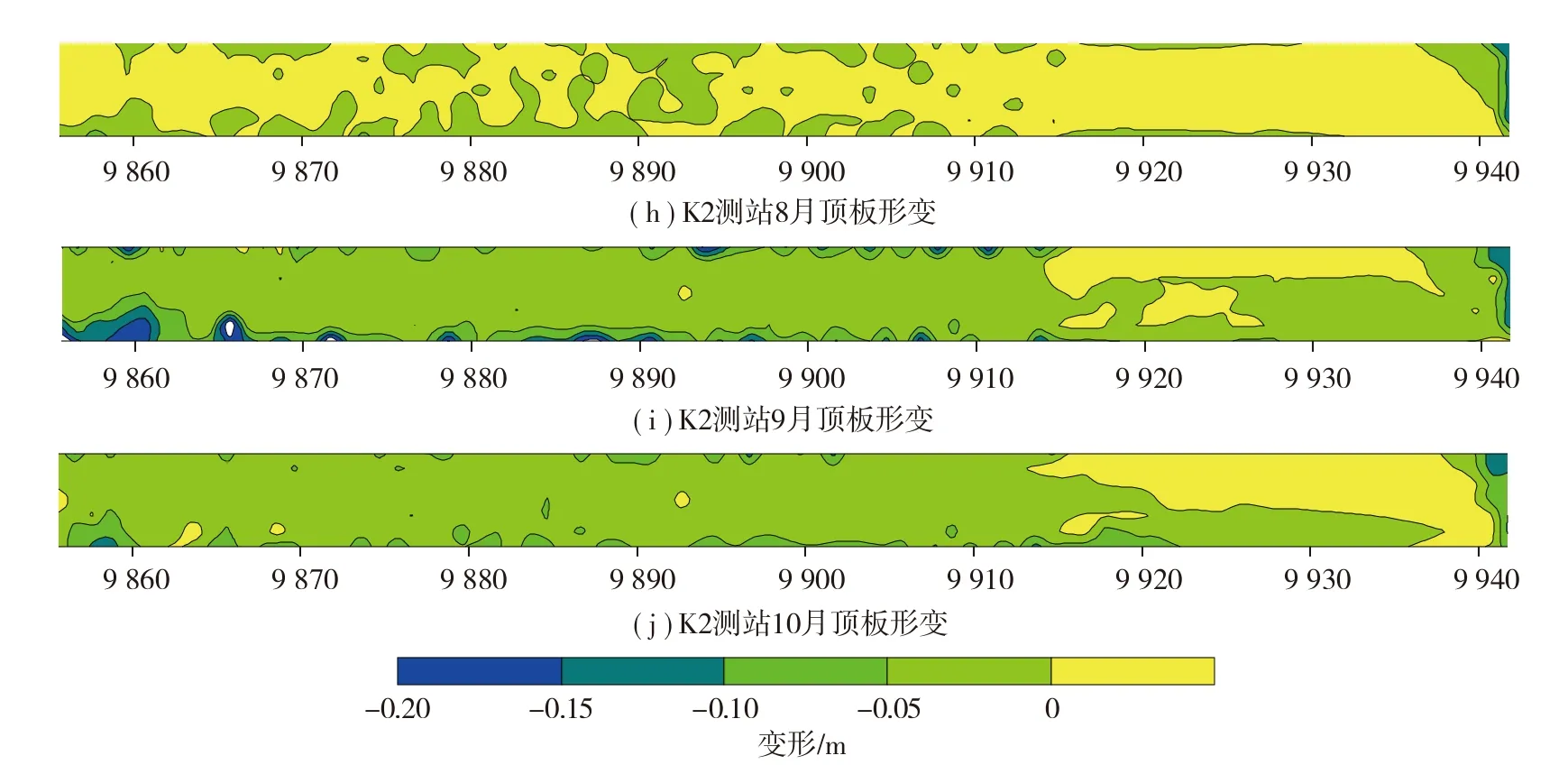
圖7 監(jiān)測區(qū)頂板變形云圖 Fig. 7 Diagram of roof deformation in monitoring area

表3 監(jiān)測時間及推進距離 Table 3 Monitoring time and propulsion distance
通過分別對比圖7中( a )、( b )、( c ),( d )、( e )、( f ),( h )、( i )、( j )3組頂板變形云圖,結(jié)果顯示2F區(qū)域8月各位置形變最小,主要集中在區(qū)間-0.05~0 m,9月頂板形變區(qū)間-0.10~-0.05 m部分增多,10月頂板形變則較9月僅部分區(qū)域發(fā)生微小改變;K1區(qū)域頂板形變隨工作面推進呈逐漸增大趨勢;K2區(qū)域8月頂板大部分區(qū)域僅發(fā)生微小形變,9月主要集中在區(qū)間 -0.10~-0.05 m,10月部分區(qū)域發(fā)生微小變化。分別對比同期各區(qū)域變形情況,即圖7的( a )、( d )、( h ),( b )、( e )、( i ),( c )、( f )、( j )3組頂板變形云圖,8月2F區(qū)域變形主要集中在區(qū)間-0.05~0 m,K1區(qū)域變形量較小,K2則僅小部分區(qū)域發(fā)生變形;9月各區(qū)域的形變量逐漸增加;10月2F,K2區(qū)域則僅部分區(qū)域發(fā)生微小變化,K1區(qū)域變形量仍在增加。通過上述頂板各區(qū)域的形變量變化情況得出工作面推進過程中應(yīng)力沿工作面推進方向傳遞,靠近采空區(qū)位置附近最先發(fā)生不均勻變形,與理論相符。提取頂板中軸線位置處的具體形變數(shù)據(jù),得到3期觀測數(shù)據(jù)相對形變值。巷道監(jiān)測區(qū)域內(nèi)頂板1期平均下沉量約為11.81 mm,頂板2期平均下沉量約為40.11 mm,頂板3期平均下沉量約為46.47 mm。2F測站監(jiān)測區(qū)域內(nèi)頂板1期平均下沉量為40.61 mm,2期平均下沉量為57.26 mm,3期平均下沉量為57.86 mm;K1測站監(jiān)測區(qū)域內(nèi)頂板1期平均下沉量為1.09 mm,2期平均下沉量為36.49 mm,3期平均下沉量為74.46 mm;K2測站監(jiān)測區(qū)域內(nèi)頂板1期平均下沉量為9.80 mm,2期平均下沉量為26.39 mm,3期平均下沉量為16.67 mm。上述數(shù)據(jù)顯示巷道頂板中心下沉量受采動影響逐漸增大,巷道縱向受力不均衡,開采后方巷道的劇烈程度大于前方,2F監(jiān)測區(qū)域劇烈程度最大,巷道圍巖變形最劇烈區(qū)域相較于停采線位置表現(xiàn)出一定的滯后性。
各監(jiān)測區(qū)域測點頂板變形曲線如圖8所示,K1區(qū)域內(nèi)測點變形較2F和K2區(qū)域不同,在2F區(qū)域和K2區(qū)域內(nèi)測點均趨于平穩(wěn)時K1區(qū)域內(nèi)測點仍在發(fā)生變形,與圖7頂板變形云圖結(jié)果吻合。礦區(qū)地質(zhì)報告顯示有斷層橫跨201工作面,可能造成該現(xiàn)象的發(fā)生。根據(jù)《煤礦安全質(zhì)量標準化考核評價辦法》,頂?shù)装逡平堪床筛邞?yīng)≤100 mm/m。

圖8 實測頂板變形曲線 Fig. 8 Deformation curves of the measured roof
各監(jiān)測區(qū)域測點底板變形曲線如圖9所示,巷道底板變形情況不明顯,最大變形不超過50 mm,結(jié)合實際勘察,巷道并未有大變形出現(xiàn),圍巖處于穩(wěn)定狀態(tài),支護效果明顯。
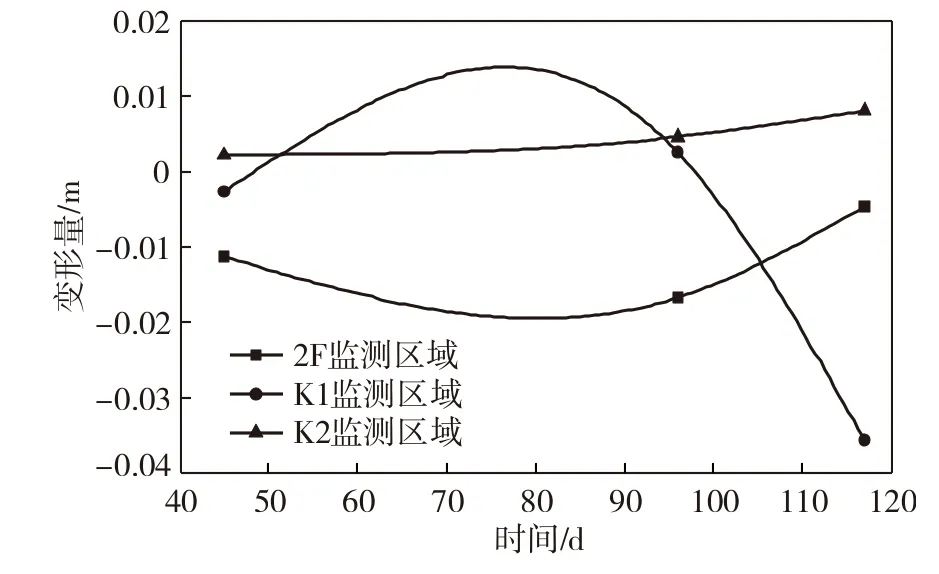
圖9 實測底板變形曲線 Fig. 9 Deformation curves of measured bottom
4 結(jié) 論
( 1 ) 井下環(huán)境較為復(fù)雜,三維激光掃描儀有效掃描距離衰減嚴重,建議在井巷工程現(xiàn)場監(jiān)測中,測站點距離不宜超過50 m。
( 2 ) 根據(jù)提取頂板形變云圖和測點數(shù)據(jù)顯示,掃描監(jiān)測區(qū)頂板變形值總體形變量較小,頂板支護方案效果明顯。
( 3 ) 通過形變提取對比結(jié)果,應(yīng)力沿工作面推進方向傳遞,鄰近采空區(qū)區(qū)域處最先發(fā)生變形,變形值隨距離增加逐漸衰減,與理論相符,三維激光掃描觀測結(jié)果可靠。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
中華建設(shè)(2019年12期)2019-12-31 06:47:58
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
江西建材(2018年4期)2018-04-10 12:37:22
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
江西煤炭科技(2015年1期)2015-11-07 03:06:32
中國鐵道科學(2015年5期)2015-06-21 06:53:18
