高壓雙分裂輸電線路四輪機器人動力學建模與仿真研究
2021-05-11 07:27:46鄒德華葉高呈
武漢紡織大學學報 2021年2期
毛 盾, 鄒德華, 江 維, 葉高呈
(1. 智能帶電作業技術及裝備(機器人)湖南省重點實驗室(國網湖南省電力有限公司 輸電檢修分公司),湖南 衡陽 420100;2. 武漢紡織大學 機械工程與自動化學院,湖北 武漢 430073)
0 引言
電力是國民經濟發展的命脈[1-2],高壓輸電線路[3-4]是電能傳輸的重要通道,遇到特殊的地理環境和惡劣的自然環境會導致線上多種不同故障發生,給線路維護作業帶來挑戰,會嚴重影響整條線路正常運行。為保障高壓輸電線路的安全正常穩定運行及有效降低經濟損失,需要定期和不定期地對導線金具及其運行環境進行檢修維護和施工作業。目前,這類在危險、惡劣環境下的特種作業均是由人工來完成,不僅勞動強度大[5]、作業效率低[6]而且存在極大的人身安全風險[7]。隨著輸電質量與作業安全性的考核指標越來越高,以及現代電力系統作業與管理自動化的迫切需求,人工作業方式與現代高質量電力輸送之間的矛盾愈發凸顯[8-10]。因此,開發能代替人工檢修作業的先進實用自動化裝備,其中一種有效方法是采用移動機器人搭載作業機械手,構成完整的帶電作業機器人[11-12]系統,其系統平臺和相關關鍵技術的研究是當今科技發展的熱點問題之一。
帶電作業機器人的自主作業控制是其完成作業任務的前提以及其作業智能性的重要體現,特別是雙分裂四輪機器人, 其自身結構和作業環境更加復雜,而機器人動力學模型是其控制器、關節機械結構和電氣控制參數設計的基礎,且動力學模型的準確度直接影響到機器人控制性能和運行速度,目前常用的建模方法主要有拉格朗日法[13]、哈密爾頓法[14]、牛頓-歐拉法[15]等,但它們大都是從整體上進行建模,且模型具有高階非線性特征[16-17],這些給機械臂動作控制器的設計和關節電氣參數選型帶來很大困難。因此, 本文將四輪移動機器人動力學建模進行體系分解,從關節動作執行層建立作業臂旋轉、伸縮、橫移、縱移等基本動作的動力學模型,其次構建雙機械臂動力學模型,然后逐層遞推建立四輪移動機器人完整動力學模型。最后,通過機器人關節實際運行過程中獲取的實際數據和所建立的模型進行對比分析,進一步驗證理論模型的正確性,通過本文的相關研究為雙分裂四輪驅動機器人物理樣機開發及其智能控制器的設計奠定堅實的理論基礎。
1 四輪移動機器人實體結構與動力學建模分層
1.1 四輪移動機器人的實體結構
四輪移動帶電作業機器人的實體模型如圖1 所示。其中,兩個機械手以移動機器人為載體沿雙分裂輸電導線行走,移動平臺由機體、機械臂、行走機構等構成。行走輪機構與機械臂相連,沿雙分裂導線行走。機器人本體移動平臺搭載雙機械手,旋轉關節可在雙分裂導線作業空間平面內轉動,兩個伸縮關節可以帶動末端執行機構實現垂直方向做升降運動, 縱向移動關節可以分別調整末端執行機構的套筒相對于二分裂間隔棒螺栓的位置,通過各關節協同工作,將雙臂末端執行機構帶到或離開工作平面完成二分裂間隔棒檢修作業任務。

圖1 四輪移動帶電作業機器人實體結構圖
1.2 四輪移動機器人動力學建模層次結構
四輪移動機器人動力學建模采取逐層遞推的方式可以大大簡化建模過程中的繁瑣數學運算,將機器人的建模分為決策層、中間層、執行層三個層面。在執行層可以分別建立機械臂1 和機械臂2 基本動作的動力學模型,基于機械臂1 和機械臂2 的基本動作,動力學模型可建立機械臂1 和機械臂2 的動力學模型,最后基于雙機械臂的動力學模型可建立四輪移動機器人的完整動力學模型。由于在機器人作業過程中主要是依靠兩個機械臂及其末端的運動,因此,在機器人動力學建模時可以忽略作業末端、行走輪及其夾爪對整個機器人動力學模型的影響,根據上述分析可得到四輪移動機器人動力學建模層次結構如圖2 所示。

圖2 四輪移動機器人動力學建模層次結構圖
2 基于分層結構的四輪移動機器人動力學建模方法
2.1 四輪移動機器人基本關節動作動力學建模

設作業臂在做旋轉運動時的轉動慣量為J,作業臂旋轉電機旋轉角為3θ,3τ為作業臂2 旋轉關節外力總和,根據相關理論知識,并結合旋轉關節電機電壓平衡方程可得作業臂做旋轉運動時的動力學方程為(3)式。

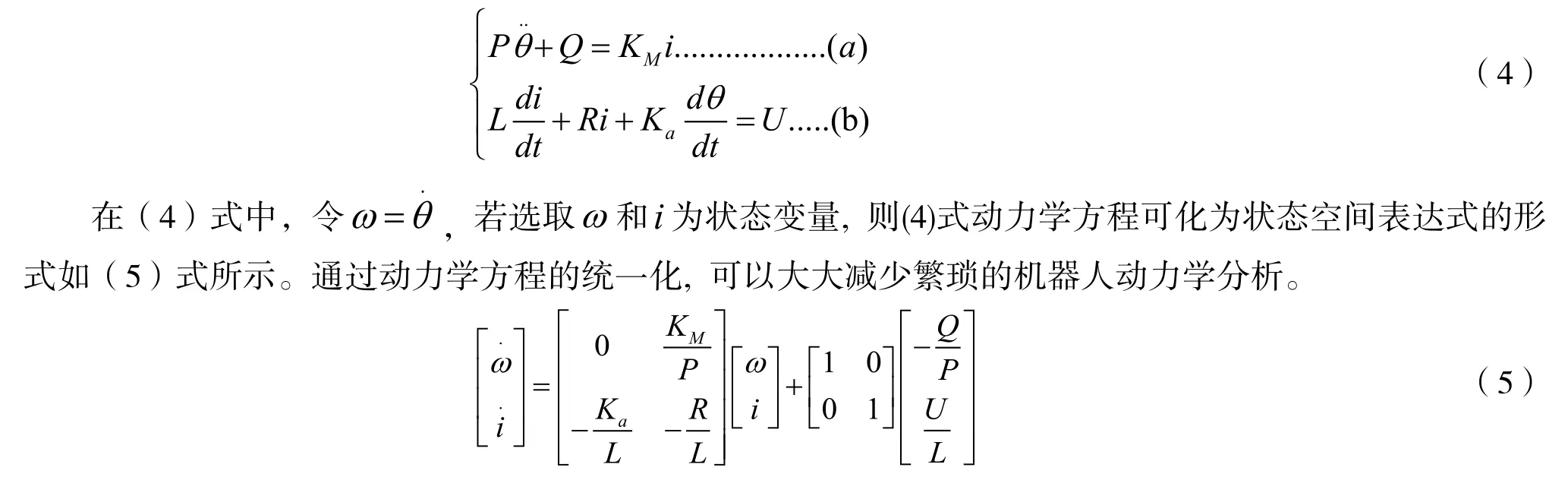
2.2 機械臂關節動作動力學方程的統一形式
為了便于機器人系統的動力學分析與控制,可將(1)、(2)、(3)式作業臂基本動作動力學方程統一化為(4)式。其中4(a)為機械方程,4(b)為電機方程,(4)式中P,Q為常數,θ為關節電機轉角,i 為關節電機電樞回路電流,U為關節電機電樞電壓,L、R是電樞回路的電感和電阻,KM、Ka是與關節電機有關的常數。
2.3 四輪移動機器人機器人動力學建模及其推廣
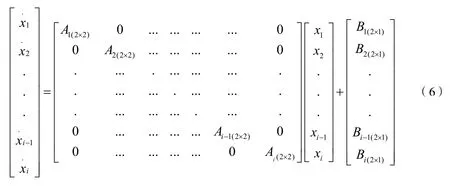
四輪移動機器人在作業過程中主要是依靠機械臂之間的協調關節運動完成作業任務,對于已經建立的機械臂動力學方程可得到完整四輪移動機器人動力學模型,并對其進行一般化處理和應用推廣可得(6)式的多臂多關節機器人動力學模型的一般形式,在(6)式中,xi(i = 1 ???n)分別表示機器人機械臂基本動作,Ai(2×2)(i = 1???n)表示相應動作的狀態矩陣,Bi(2×1)(i = 1???n)為相應動作的輸入向量。
3 四輪移動機器人動力學仿真研究
3.1 機器人動力學模型的數值模擬分析
對于已建立的四輪移動機器人動力學模型正確性的驗證同樣采取分層的方式,通過驗證執行層機械臂所有基本動作動力學方程的正確性來驗證機器人動力學模型的有效性。每個機械臂基本動作的動力學方程包含兩部分即描述電流與角速度關系的機械方程和描述電樞電壓和電樞電流關系的機械方程。關于機械方程的驗證可通過測量出加速度、電樞電壓,通過曲線擬合進行驗證關于電機方程為電樞電機固有特性可不需驗證, 因此只需要分別驗證旋轉、伸縮、縱移動作的機械方程的正確性即可驗證機器人動力學方程的正確性, 從而對理想情況下的機器人關節動力學進行數值模擬與分析。

由(7)-(10)式可得作業臂2 的執行層旋轉、伸縮、橫移等基本動作的機械方程分別為(11)-(13)式,通過四輪移動機器人作業時各關節所采集到的實時數據來驗證(11)-(13)式動力學模型的正確性。

3.2 仿真實驗
以作業臂2為例通過機器人現場運行獲取到的5組旋轉關節、伸縮關節、橫移關節的電樞電流與關節運動加速度數據如表1所示。在MATLAB環境下對所建立的理論模型和時間測量數據進行仿真研究,可得到如圖3的仿真結果。
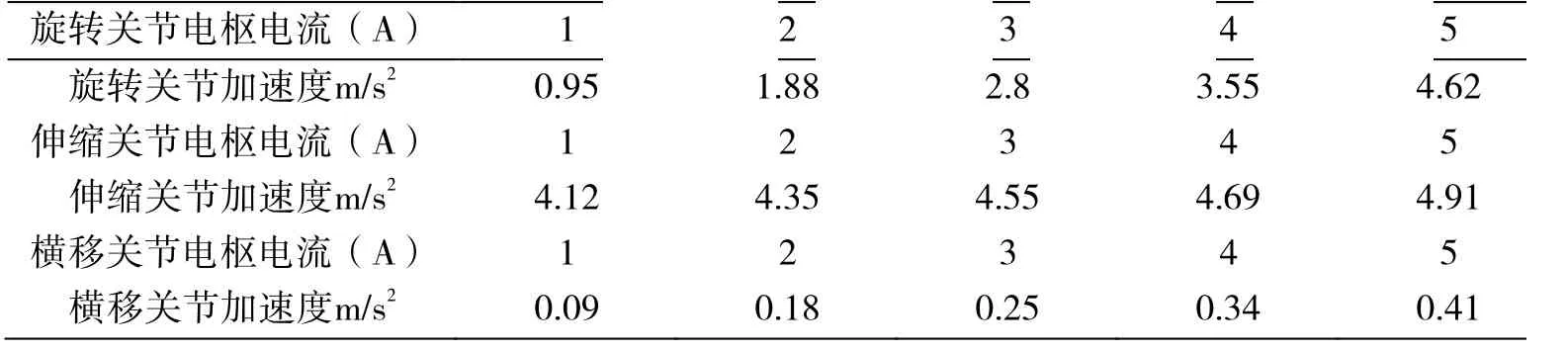
表1 電樞電流與關節加速度實時數據
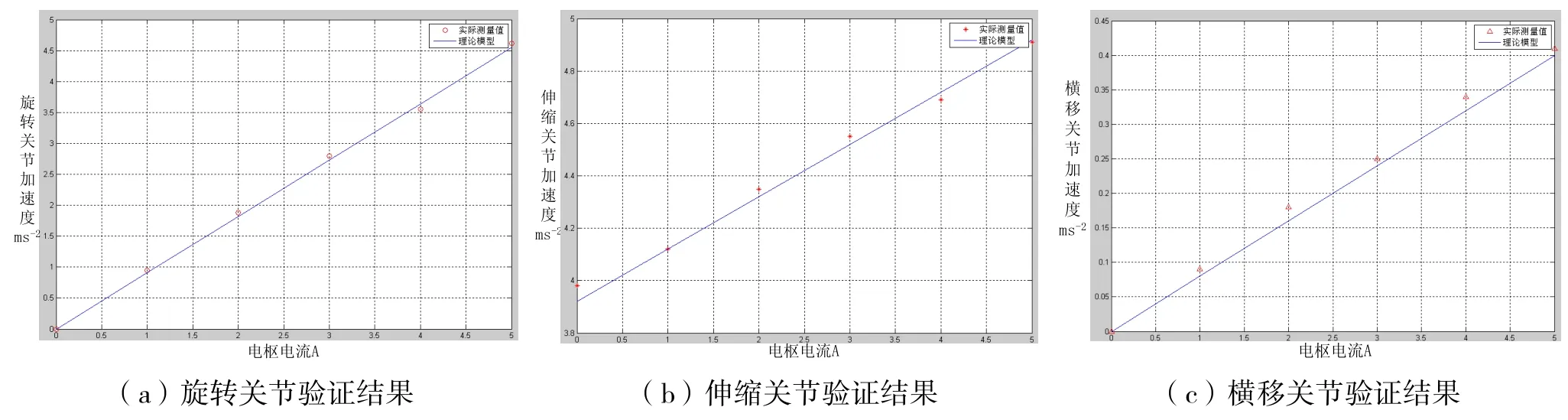
圖3 四輪移動機器人動力學模型仿真驗證
在圖3 所示四輪移動機器人動力學模型驗證結果中,離散的圓圈、星花、三角點為實際測得旋轉、伸縮、橫移關節電機參數,三條直線為待驗證的理想情況下關節基本動力學方程。由圖3 所示仿真結果可以看出離散的實際測量值點較均勻地分布在直線周圍或在直線上,沒有出現較大偏差,可以驗證機械臂2 執行層基本動作動力學方程的正確性,同理可以驗證機械臂1 執行層基本動作動力學方程的正確性,進而向上層遞推可知本文所建立的四輪移動機器人完整動力學方程是有效的, 同時該研究為四輪驅動移動機器人物理樣機的設計與開發奠定了堅實理論基礎。
4 結論
(1)提出了一種通用的面向二分裂輸電導線間隔棒檢修的四輪驅動移動機器人動力學建模分層架構和逐層遞推式的機器人動力學模型建模方法。
(2)建立了執行層旋轉、伸縮、橫移、縱移基本動作的動力學模型,由此向上層遞推建立了雙作業臂的動力學模型和完整的帶電作業機器人的動力學模型。
(3)通過四輪驅動移動機器人現場運行所獲得的關節實時數據與所建立的機器人動力學理論模型的仿真分析,驗證了模型的正確性,為后續機器人物理樣機的開發奠定了理論基礎。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
當代工人(2020年8期)2020-05-25 09:07:38
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
制造技術與機床(2017年3期)2017-06-23 08:11:21
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
