核電廠事故機器人應用研究
2021-05-11 07:16:00王振宇黃偉奇楊劍波
核安全 2021年2期
關鍵詞:核電廠
王振宇,黃偉奇,*,孫 健,楊劍波
(1.陸軍防化學院,北京 102205;2.成都理工大學,成都 610051)
據統計,1949 年-1999 年世界上發生的主要輻射事故多達136 起[1],最為嚴重的有美國三里島核事故、蘇聯切爾諾貝利核事故、福島核事故(2011 年),在歷次核事故中,機器人都發揮了重要作用。目前機器人在核事故中的應用主要圍繞輻射偵察、應急通信、工程搶險補救、環境監測、去污等環節[2],其中最關鍵的工作是核心區的輻射偵察。本文將圍繞輻射偵察機器人在核電廠核事故中的應用及需求進行分析。
1 核事故輻射偵察機器人應用現狀
核事故環境復雜、輻射對人危害大,探測任務主要由機器人承擔,包括圖像偵察和輻射偵察。工作在核心區的輻射偵察機器人的性能要求最高,其獲得的事故信息對于事故的緩解、處理具有至關重要的作用。
1.1 三里島核事故
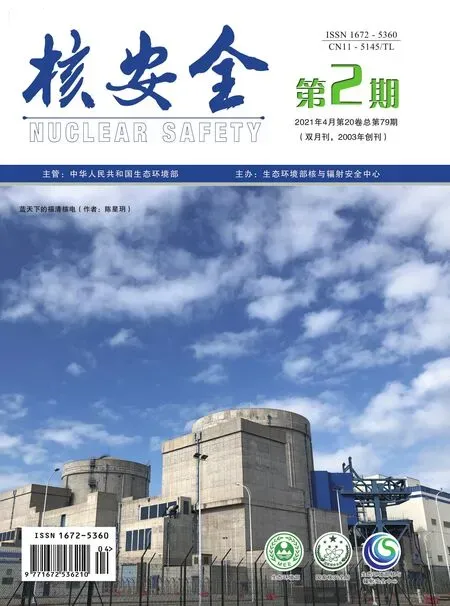
最早在三里島核事故中應用的探測機器人有ROVER、LOUIE I,主要以輪式和履帶式為主要運動方式。ROVER是一輛六輪遙控偵察車[3],具有環境監測、視頻傳輸、采樣、去污洗消的功能。有兩臺ROVER部署在輻射水平為25 mSv/h到10 Sv/h的2號機組地下室,完成了繪制總輻射圖、污泥取樣的任務[4]。LOUIEⅠ是一輛雙履帶偵察車,能夠傳輸圖像及輻射數據,其主要任務是到達角落進行輻射探測,與ROVER形成補充[5]。這一時期也研究了多足式機器人ODEX-Ⅰ[6]、涉水機器人SURVEYOR、小型環境監測機器人SURBOT、樣品采集探測機器人ROCOMP等[7]。
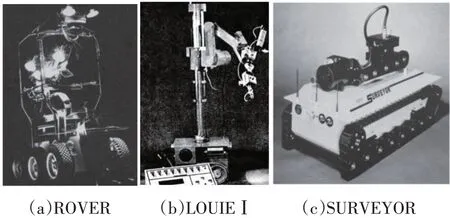
圖1 三里島核事故偵察機器人Fig.1 TMI-2 nuclear accident detection robot
1.2 切爾諾貝利核事故
切爾諾貝利核事故處理期間,機器人也發揮了重要的作用,其中的探測機器人有:PP 系列輪式[8]、履帶式探測機器人[8](PP-Г1、PP-Г2)和先鋒號(Pioneer)。PP 系列輪式探測機器人主要有:PP-1、PP-2、PP-3、PP-4。PP-1 機器人由蘇聯中央機器人技術和技術控制論科學研究所(RTC)研制,重39 kg,平均移動速度為0.2 m/s,攜帶有攝像機、輻射劑量強度測量儀,以外接電纜的方式供電,完成了3 號機組區域汽輪機大廳(500 m2)、4號機組通道、裝卸口下廠房(200 m2)的調查任務。PP-2機器人完成了3號機組房頂(800 m2)的調查。PP-Г1、PP-Г2為履帶式探測機器人。PPГ1 機器人重65 kg,移動速度0.3 m/s,用于探測樓梯、通道等。PP-Г1 在用于探測汽輪機大廳頂部區域的通道,РР-Г2 型機器人用于 4 號機組塌陷區域和3 號機組頂部的環境偵察。先鋒號(Pioneer-1)由美國能源部、美國宇航局、卡內基梅隆大學等單位聯合設計,主要用于調查石棺內部情況[9]。先鋒號重500 kg,尺寸為L 1219 mm×W 914 mm×H 914 mm,攜帶有視頻系統、取樣工具、機械手臂、γ/中子劑量傳感器、溫濕度傳感器等[10],可以收集到堆內溫度、濕度、標記放射性熱點的數據[11],實時測繪石棺內部3D地圖,進而評估石棺結構損壞程度。先鋒號的核心部件處于工作區外并通過線纜與車體連接,車載控制電路采用屏蔽盒進行防護,攝像機采用約1.25 cm的薄鉛層進行屏蔽,機器人系統可在劑量率5-10 Sv/h 的場合下工作并承受高達10 kSv 的累計劑量[3,9,12]。
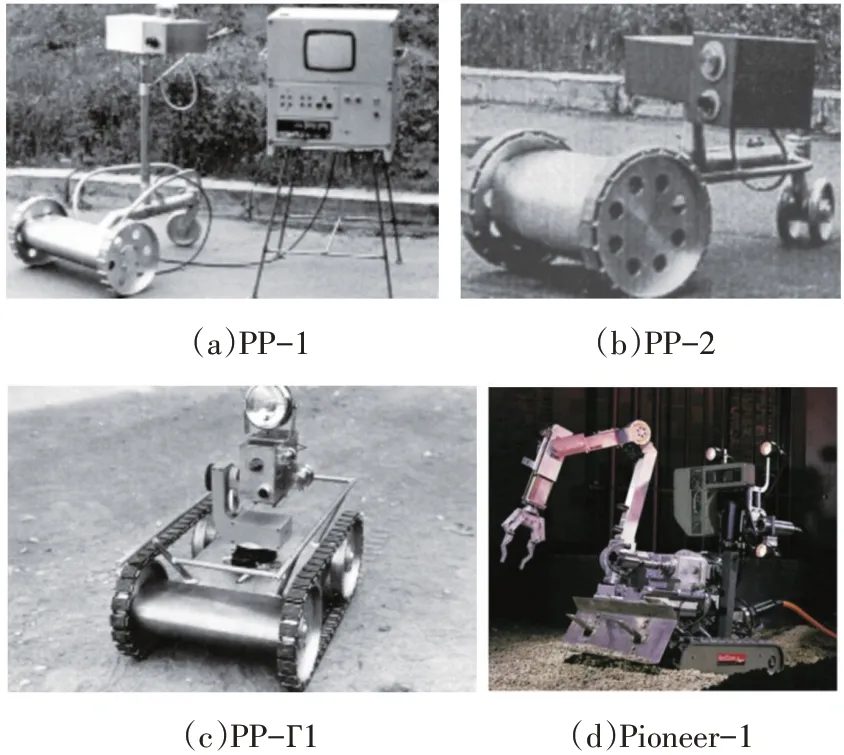
圖2 切爾諾貝利事故偵察機器人Fig.2 Chernobyl accident detection robot
1.3 福島核事故
2011 年3 月福島核電廠發生了七級核事故。廠房航測任務由美國公司研制的Honeywell 完成,它是一種小型無人機,適合于運送背包和單人操作,是福島核事故發生后第一時間投入使用的機器人。Honeywell 主要進行空中拍攝和環境測量,并對福島核電廠燃料池附近的輻射水平進行監測和檢查。它拍攝的福島核電廠1-4號機組照片為評估事故進展,采取有效救災措施,提供了重要的參考資料[13]。廠房內的探測任務由美國 PackBot、英國 TALON、日本 Quince 和 JAEA-3機器人完成。PackBot 是輕型履帶式機器人,重30 kg,最大速度為9.36 km/h,采用無線通訊方式,配有γ 相機、攝像機、輻射劑量儀等設備,主要用于監測1、2、3號機組室內外的輻射劑量、溫濕度、氧氣濃度、圖像等狀態[12]。TALON 機器人于5月1日投入福島核事故救援,其主要工作部件有:繪制輻射劑量分布圖系統、防輻射操縱箱、γ射線成像儀、激光3D 成像儀、紅外相機[14]。Quince 履帶式機器人重約26.4 kg,移動最大速度為1.6 m/s,由日本千葉工業大學、大阪大學和國際救援組織共同研制而成,為了適應福島核反應堆廠房,Quince 被改裝為雙絞線電纜信號傳輸,隨后于2011 年 6 月和 PackBot 進行 1-3 號反應堆內部偵察以及2號機組燃料水池調查的工作。Quince可以對建筑物上層偵察。福島核事故處置中,先后有兩臺Quince機器人投入使用,其中第一臺于10月份檢測第三層設備損壞程度時電纜出現故障,至今未恢復。第二臺Quince 機器人于2012 年3月投入使用[14]。JAEA-3 是在 JCO 臨界事故后,由機器人RESQ-A 改裝而來的,配備了伽馬射線成像儀,以一根50米長的電纜進行電力和信號傳輸,于2011年7月2日投入福島第一核電廠工作,進行2號機組的伽馬輻射成像工作。
圖3 福島事故前期偵察機器人Fig.3 Early detection robot of Fukushima accident
目前福島核電廠的處理工作還在繼續,探測機器人的種類更多、作業區域更加廣泛、更靠近堆芯區域,且增加多種針對具體區域的特種偵察機器人。其中主安全殼內部的偵察工作主要由Small Investigation Device(SID)、Shape-changing Robot、Scorpion完成。Small Investigation Device由東京電力公司開發,雙履帶式行進,可越過5 cm的障礙,其外殼用3D 打印機制造而成。該設備使用可180°旋轉的智能手機進行拍攝,以無線方式進行數據傳送,其任務為3 號機組主安全殼(PCV)設備艙口的偵察工作[15]。 Shape-changing Robot[15]是日立GE公司開發的一個主安全殼內部檢查設備,它的形狀可根據工作的場景進行改變,可以管狀的形式穿過狹窄的管道,并在工作時膨脹成U 形以穩定自身。2015 年4 月,該機器人投入到1號機組主安全殼內部柵格表面進行探測。自行式蝎子機器人Scorpion用于探測基座內部結構和落在控制棒驅動裝置上的燃料碎屑,它可以通過貫穿口進入安全殼內部進行工作[16]。
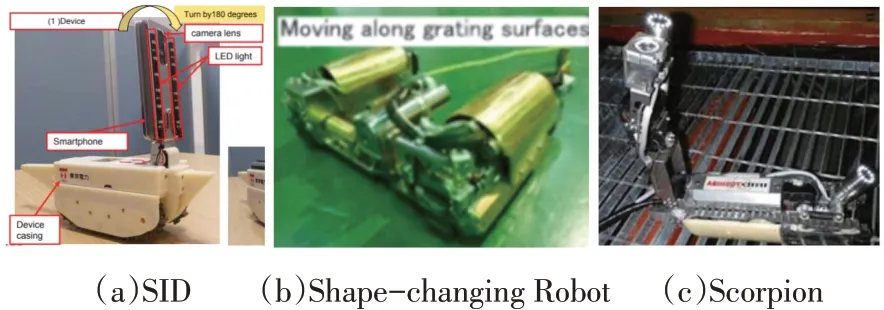
圖4 主安全殼偵察機器人Fig.4 Reconnaissance robot of PCV
反應堆廠房各層的探測任務由Kanicrane、Rosemary、Sakura、High-access Investigation Robot(HIR)和 FRIGO-MA 完成。Kanicrane 機器人[15]由日立通用公司開發,重1250 kg,最高移動速度為1.5 km/h。配備有一個可水平旋轉345°的伽馬相機,數據通過中繼器以無線方式傳輸,用于反應堆廠房一樓4米高處的輻射偵察。Rosemary(65 kg,尺寸為L 700 mm×W 500 mm)和Sakura(35 kg,尺寸為L 500 mm×W 390 mm)由日立GE 千葉理工學院開發,用于探測1-3 號反應堆建筑第二層和第三層。Rosemary 和Sakura協同進行工作,可自行前往充電臺進行充電,無需人員更換電池[15]。High-access Investigation Robo(t簡稱HIR)主要用于反應堆建筑的上層、狹小空間的探測。該機器人可以對最高7 米處的頂部、反應堆上層的管道口和通風口表面進行輻射測量[15,17]。FRIGO-MA(38 kg,尺寸為L 650 mm×W 490 mm×H 750 mm)適用于反應堆廠房內小房間的探測,實際工作中主要對主安全殼的氣體控制系統管道進行檢測[15]。
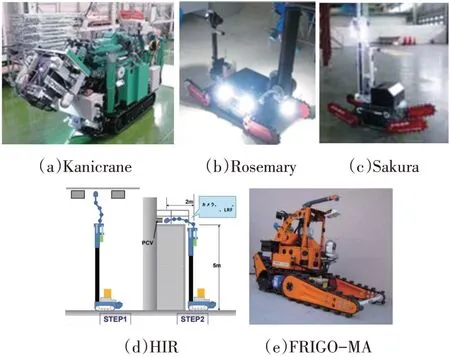
圖5 廠房偵察機器人Fig.5 Reconnaissance robot of building
反應堆地下抑壓室中有Swimming Robot、Crawling Robot、Telescopic Arm Runner(1-2)、Lake Fisher、VT-ROV、DL-ROV、SC-ROV、Water Boat等機器人進行探測工作[15]。Swimming Robot、Crawling Robot和Water Boat負責抑壓室環壁的檢測工作。Swimming Robot由日立GE公司開發,重22 kg,尺寸為L 480 mm×W 420 mm×H 375 mm,具有可±45°調整的數碼相機、浮力調整和推進裝置。Crawling Robot由日立GE公司開發,重40 kg,尺寸為L 650 mm×W 480 mm×H 350 mm,上方和后方各有一個相機,上部相機可在10-90°范圍內進行調整,可針對水中管壁進行偵察。Water Boat 是日立通用公司開發的船式機器人,能夠漂浮在抑壓室內部水面上,主要從內部檢測環壁有無泄漏點。抑壓室上部的探測工作由Telescopic Arm Runner(1-2)、Lake Fisher 完成。Telescopic Arm Runner(重70 kg,尺寸為L 550 mm×W 509 mm×H 826 mm)是日立GE 公司開發的一款升降機器人,其升降桅桿可達3826 mm 高,用于對抑壓室頂部進行偵察。另一個抑壓室偵測裝備(Telescopic Arm Runner-2)重100 kg,尺寸為L 550 mm×W 509 mm×H 1161 mm,其采取自上而下吊掛相機的方式對抑壓室上部進行探測,吊掛長度可達1461 mm,同時配有一個聲吶,對水中障礙物進行探測。Lake Fisher 重180 kg,尺寸為L 1038 mm×W 658 mm×H 1016 mm,是履帶式機器人。相機裝在向下升降的桅桿頭部,可對抑壓室外側狹窄處進行偵測。抑壓室室外下表面探測裝置由三款東芝公司開發的機器人VT-ROV、DL-ROV、SC-ROV 組成。其中,D/W 彎管結合部探測裝置(VT-ROV)尺寸為L 300 mm×W 280 mm×H 90 mm,主要用于探測D/W 外殼和膨潤管結合部的泄露水。VT-ROV可通過直徑350 mm的管道,利用磁石材料附著在鋼質外殼和管道上行動,同時具有防水密封結構和最高400-500 mSv/h 和累積200 Gy耐輻射性。排水管探測裝置(DL-ROV)主要通過釋放示蹤器的方式檢測排水管出水流泄露情況。其主要性能有:可進入直徑350 mm 的管道內;最大防水深度為10 m;具有最高400-500 mSv/h 和累積200 Gy 耐輻射性;工作范圍約150-2000 m;探測光源可視距離為600 mm。地下環形室的探測工作由Quadruped 和Survey Runner完成。Quadruped 機器人由東芝公司設計的子母機器人組合,母體重量約65 kg,高106 mm,最大速度1 km/h,可釋放子機器人(重約2 kg)用于狹小空間探測,完成了地下環形室內排氣管周圍的探測。Survey Runner 機器人重45 kg,尺寸為L 505 mm×W 510 mm×H 830 mm,用于2號機組環型室的探測工作。主要性能為:設計了一個長約165 mm 的爬行式履帶,可通過最高235 mm的障礙,最大爬升角度為45°,行駛速度最高為2 km/h[15]。

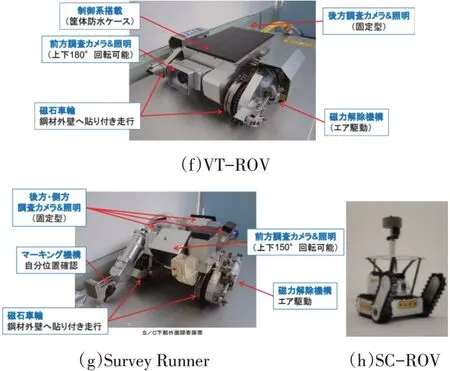
圖6 抑壓室偵察機器人Fig.6 Suppression chamber detect robot
2 核事故特點與需求分析
21世紀的機器人技術取得了長足的發展,在各行各業的工作中展現出了獨特優勢。福島核事故以來,世界各國也愈發重視機器人在核事故中的作用。但核事故環境存在著強輻射場、地形復雜、高溫高濕等特點,機器人需要更高的技術性能來適應核環境。
2.1 輻射場強
放射性物質泄露水平是衡量核事故等級的一個重要指標,因此高強度的輻射場是核事故區別于一般應急事故最顯著的特征。IAEA在1990年頒布的國際核事件分級標準(INES)[18]中規定等效放射性超過1016Bq131I 的屬于7 級特大事故(切爾諾貝利核電廠事故、福島第一核電廠事故),切爾諾貝利事故廠區部分地方輻射讀數達到100 Gy/h[19],而人的半致死劑量為 5 Sv。高精密機器、機械對輻射更為敏感,輻射會激發半導體器件內部的原子,使之產生空穴,嚴重干擾半導體器件工作,直至癱瘓。在核事故中也發生過多次機器人因輻射失效的案例,例如切爾諾貝利事故中,STR-1在執行清理放射性廢物任務時,僅7分鐘就失去了行動能力,福島核事故處理中,Shape Shifiting-2 在探查1 號機組反應堆底座時,由于輻照劑量率過高(4.1 Gy/h)無法返回;TOKYO(AP)在探查2號機組反應堆底座時,由于高劑量率輻射(約80 Gy/h)導致攝像機無法正常工作而返回;Scorpion在探測2號機組反應堆底座內部時,由于高劑量率輻射(70 Gy/h)導致履帶無法移動[20]。核事故場景下的輻射種類有很多,由于α、β可以被機器外殼輕易阻攔,對機器人設備起主要影響作用的是中子和γ射線。高輻射場強要求機器人具有較好的輻射防護能力,這也是核事故機器人區別與一般機器人最顯著的特征。以往對于電離輻射防護,加屏蔽層是其首選方法,但對于核事故機器人來講,厚重的鉛層會極大地增加機器人重量,限制其運動能力和穩定性,必須在材料的屏蔽效果和密度之間合適選擇,目前其技術難點在于新型防輻射材料的研究。
2.2 高溫高濕
國際原子能組織(IAEA)核動力反應堆數據庫2020年的數據顯示[21],世界目前現有的440個反應堆機組中,有67.5%為壓水堆,在中國這一比例高達93.9%,此外全球在建核電機組中,壓水堆的比例達81.5%。壓水堆嚴重事故也是環境最為復雜的核事故。反應堆事故一般是由于一回路的冷卻劑補充能力不足或冷卻劑的意外喪失,使堆芯失去冷卻,進一步導致燃料棒熔毀。反應堆正常工作時,燃料棒溫度約600°左右,發生熔毀事故時其溫度可達到2000 °以上[22],除此之外,壓水堆嚴重事故往往伴隨著蒸汽爆炸和鋯水反應生成的氫氣爆炸,使得發電廠廠房內充斥著大量的水蒸氣。對于一般機器人和電氣設備來說,大量的水蒸氣是致命的威脅。即使堆芯熔毀得到了控制,仍會有大量的余熱不斷釋放,于是在事故處理階段,高溫和積水也極大限制了人員和機器人的工作范圍。針對這一特點,在福島事故發生后,人們研究應用了Underwater ROV、Survey Runner、Gengo、Trydiver 等多款適用于水環境的核事故機器人。此外機器人應有較好的熱防護技術,以支持其深入堆芯處的探測和工作能力。
2.3 空間狹窄復雜
核事故的發生往往是多種因素綜合作用的結果,例如福島核電廠事故是由地震、海嘯引起,各種人為因素導致進一步惡化的。此外核事故也會帶來火災爆炸等次生災害,多種危害因素的疊加導致核事故場景極其復雜惡劣。核反應堆核島內的典型設備與系統有:反應堆堆芯、壓力容器、蒸汽發生器、穩壓器、主循環泵、抑壓池、乏燃料水池、通風系統、安注系統、余熱冷卻系統等。核反應堆廠房是一個高約60 m的龐大建筑,其內部管道錯綜復雜,各房間結構依據其功能差異較大,可以說是目前最為復雜的工程結構。在火災爆炸、積水蔓延破壞的情況下,核反應堆廠房內的復雜情況難以想象。例如在福島核電廠近40年的長期運轉過程中,人們在原有機組設備上增加了許多新的控制系統,致使其內部通道更加蜿蜒曲折,空間支離破碎。到事故發生時,進一步增大了內部空間地形的復雜程度。福島核事故后核事故機器人的運動能力有了較大的拓展,能夠較好地適應樓梯、管道、鋼材外壁等情況。未來的核事故及常規檢查中,應有適用于更多特定場景的機器人,例如微型機器人、移動更加靈活的球形機器人等。
3 總結
本文綜述了三次核電廠事故中輻射偵察機器人的性能和作業詳情。核事故輻射偵察機器人的發展可以總結為三個階段:(1)三里島事故時期:此階段核事故機器人剛剛起步,以ROVER、LOUIEⅠ為代表的機器人只具有基本的輻射監測、視頻傳輸等功能,并不具備較好的耐輻射能力。(2)切爾諾貝利事故時期:三里島事故后,人們針對機器人的輻射防護性能進行了研究,以Pioneer 為代表的機器人在耐輻照和核環境探測方面的能力有了較大改進。(3)福島核事故時期:此階段發展較為迅速,涌現了大量的核事故機器人,福島核電廠現役機器的功能更加齊全,呈現小型化、智能化、協同作業的特點。其中典型機器人有:Small Investigation Device、Shape-changing Robot、Quadruped。
猜你喜歡
設備管理與維修(2022年21期)2022-12-28 07:34:58
設備管理與維修(2022年21期)2022-12-28 07:33:36
核安全(2022年2期)2022-05-05 06:55:40
中國特種設備安全(2022年1期)2022-04-26 14:15:58
中國核電(2020年2期)2020-06-24 03:37:36
中國核電(2018年4期)2018-12-28 06:43:48
中國核電(2017年1期)2017-05-17 06:10:18
中國核電(2017年1期)2017-05-17 06:10:11
電站輔機(2016年4期)2016-05-17 03:52:40
焊接(2016年10期)2016-02-27 13:05:36