智能行人過街交通信號控制器設計與策略研究
2021-05-08 09:50:18張紹秋
智能建筑與智慧城市 2021年4期
張紹秋
(中鐵建發展集團有限公司)
1 引言
我國城市交通具有典型的混合組成特性,但行人與車輛在路權分配和競爭中,行人往往處于劣勢,多是由于交通沖突和行人出行的特征和規律造成的[1],這樣不但影響交通流的順暢通行,還對行人造成安全隱患。行人出行的特征和規律與道路、交叉口、周邊生活環境有強關聯性[2,3],因此米曉越等[4]人針對情況較為復雜的混合交通環境,設計出了信號路口行人過街系統;楊艷等[5]根據行人等待和通行的特點,研發了行人過街信號檢測安全裝置;尤偉軍[6]從多源觸發角度,設計出了行人過街控制系統研究;馬旭光等[7]從實用性出發,設計出了一種基于視頻檢測的行人過街自適應系統。上述研究從行人過街特性分析和控制系統設計兩個角度進行,推動了行人過街控制的研究和應用,但沒有充分考慮到行人過街特性檢測和車輛檢測數據融合與分析和控制策略的設計問題,為此文章提出智能行人過街交通信號控制器設計與策略研究。
2 智能行人過街交通信號控制器系統構成
2.1 系統構成
典型智能交通信號控制器的系統邏輯,由交通流采集、交通信號控制、信號配時方案輸出三大模塊構成。交通流信息采集基于多種傳感器構成的行人檢測器、車輛檢測器陣列完成交通流動態數據采集(見圖1)。采樣數據經交通信號控制器邏輯處理算法后生成配時方案,完成交通信號燈控制實際路口運行狀況。達到改善交通流運行現狀的目的,合理組織、分流交通,構建車路協同控制系統。達到預期期望控制效果,在保障行人安全基礎上,最大限度減少車輛延誤,提高道路通行能力。基于典型智能交通信號控制的系統邏輯,設計智能行人安全過街智能交通信號器,其由交通流檢測模塊、控制模塊和輸出驅動模塊構成,如圖2所示。
2.2 系統模塊與主要功能

圖1 智能行人安全過街智能交通信號器系統結構

圖2 智能行人安全過街智能交通信號器硬件主要模塊
如圖2所示,智能行人安全過街智能交通信號器通過基于總線技術組建數據傳輸網,完成車輛檢測、行人檢測以及控制信號輸出功能。采樣交通優化控制算法,對交通流進行控制。采用行人過街優化控制算法,在無需求情況下始終給予需求方向通行權,提高道路通行效率和減少車輛延誤。
其主要模塊如下:
1)車輛檢測模塊
系統采用分時選通控制方式實現不同支路數據采集,進行有效的抗干擾設計。頻率采樣通過對不同頻率信號等使用T/M法進行精度測量。該模塊主要完成的功能為檢測道路車輛通行狀態信息。其中,在圖2a可以看到,它們包括了機動車車流量、時間占有率、瞬時車速等交通參量檢測。
2)行人檢測模塊:基于圖像處理技術完成對過街行人行為雙目識別檢測。完成對行人過街等待區域的行人等待檢測以及對行人過街區域的行人通行狀態檢測。當有行人進入等待區域后,通過行人檢測算法對攝像頭采集的視頻進行分析,以確定行人是否有過街需求。并對過街行人流量、行人方向特征進行分析。如圖2a所示。
3)信號控制模塊
采用ATLAR-FPGA平臺,利用其中的FPGA芯片,提供并行計算和萬級門電路規模,保障算法的執行能力和穩定性;通過高性能的內核和Linux操作系統,實現對控制邏輯的擴展,在面向多種混合場景的交通流形態時,可靈活配置多種相位組合關系,如圖2b所示。
4)輸出驅動模塊
通過485總線信息傳輸方式完成控制模塊配時方案輸出顯示,對實際交通流進行控制。其中,控制模塊具有自檢測功能,同時對輸出的信號也具有檢測功能。雙重沖突檢測機制,包括軟件沖突檢測及獨立的硬件沖突檢測機制,當發現沖突或依從響應錯誤時可自動啟動保護措施。如圖2c所示。
3 智能行人過街控制策略設計
為使過街行人安全、高效的通過交通樞紐,提高道路通行效率和減少車輛延誤。如圖3所示,設置三個行人過街檢測區域及兩個道路車輛檢測區,對交通沖突區域進行檢測。深入研究該路段人行橫道信號控制,目標是以機動車輛延誤與過街行人延誤的加權和達到最小,建立路段信號優化配時模型。
通過對行人以及車輛通過情況的信息采集以及對其行為的預測,結合行人過街交通流基本特性(包括行人交通流速度特性、行人交通流力量特性、行人交通流參數關系等)進行研究,同時分析通過車輛檢測器模塊傳回的車輛信息,運用智能算法對信號燈進行控制。通過控制策略達到信號機智能和最大程度保證行人安全的目標。
結合車輛檢測模塊,分析車輛速度以及流量信息,預測車輛到達停車線處的時間,通過與行人檢測器的采集信息協同判斷是否存在交通沖突,對交通信號燈進行智能控制。防止僅一個過街方向放行時間較長的情況發生。提高正常行駛車輛以及過街行人的通行效率。進一步保障過街行人的通行安全。
3.1 檢測器布局及檢測對象
在行人過街路口安裝有交通信號燈及行人檢測裝置、車輛檢測裝置。通過采集人、車交通流運行特征,經協調感應控制邏輯判斷處理后控制交叉口信號周期、綠信比,滿足行人安全過街需求,最大限度減少車輛延誤,提高道路通行能力。
1)行人檢測器
①安裝位置及數量:行人過街路口等待區;
②檢測區域:行人過街等待區、行人安全過街區、交通沖突區域檢測;

圖3 行人安全過街檢測
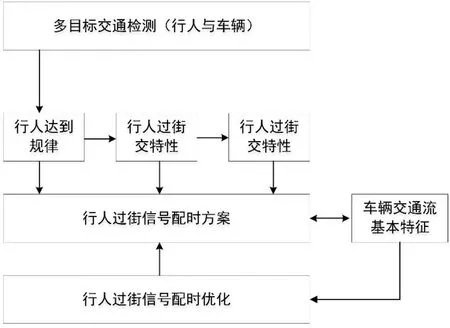
圖4 行人安全過街檢測
③檢測交通參量:行人的過街請求和過街狀態。并對行人的流量、步行速度、方向等交通參數進行提取。實現對行人的檢測、識別、跟蹤。
2)車輛檢測器
①檢測區域:道路中機動車車道交通流;
②檢測交通參量:機動車流量、瞬時車速、時間占有率,預估排隊長度。
3.2 控制策略
1)行人過街交通行為特征分析
對行人過街檢測信息進行數據分析和挖掘,從行人到達規律、過街速度、起動時間、交通違法等方面出發,對路段過街的個體行人過街特性和人群過街特性進行研究,并分析信號燈配時對行人過街交通行為的影響,應用交通沖突分析方法,對影響行人過街安全的交通沖突進行分析,提出交叉口行人過街安全可靠度計算方法。
2)行人過街需求判斷
行人檢測器通過對行人過街等待區行人流特征跟蹤、分析,判斷行人是否有過街需求。并對有過街需求的行人數目、方向進行統計。
3)行人過街安全時間預估策略
行人過街結束判斷,解決由于缺乏有效行人過街檢測技術而帶來的行人過街綠燈空放問題。同時解決由于行人尚未安全通過而放行機動車帶來的行人安全問題。有效改善機動車以及行人的運行條件,減少行人違法的發生,提高交通安全。
通過行人過街等待區人流信息及機動車車流信息動態感知,通過協調感應控制技術輸出信號配時方案,控制信號燈周期、綠信比,滿足行人安全過街需求,最大限度減小車輛延誤,提高道路通行能力。
4)機動車及行人感應協調控制
利用雙車輛檢測節點完成機動車流量、瞬時車速、時間占有率信息檢測;行人相位對通過車輛檢測器機動車數目累計,預估機動車排隊長度。通過車輛檢測器對機動車車速檢測,預估機動車達到路口時間,判斷當前行人放行是否與下一時刻機動車到達路口存在交通沖突,若不存在交通沖突,則進行交通信號相位正常切換,放行機動車。否則,延長行人綠燈時間,行人安全通過結束后放行機動車,保障了行人過街的安全性和車流的順暢,如圖4所示。
4 實際測試與驗證
利用園區內部場地中的路段進行實際測試與驗證,如圖5所示。設置路段信號燈和智能行人過街交通信號控制機,采用雙目視覺進行行人過街檢測,驗證場景包括單人、多人、人和車等。結果表明,雙目視覺能夠準確檢測行人的數量、運動的速度,形成對行人運動特性的分析結果,過街信號配時根據場景的不同動態調整,有效保障行人過街安全和車輛通行效率。

圖5 實際場地測試
5 結語
本文針對目前我國路段行人過街的專用交通信號控制智能化程度不高,尤其是行人和車輛的綜合檢測能力不足的問題,設計多目標綜合檢測裝置,并基于檢測信息對行人過街交通行為及行人交通流運行特征展開深入分析,設計智能行人過街交通信號控制器并研究行人過街優化控制策略,并進行實際場景的測試和驗證。通過本文的研究,能夠減少行人交通違法行為發生、緩解道路交通擁堵、提高行人交通安全提供技術支撐。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32