車輛加速工況駕駛性評(píng)價(jià)
2021-05-08 04:07:08李玉珍葉春林毛萬(wàn)鑫
中國(guó)新技術(shù)新產(chǎn)品 2021年4期
關(guān)鍵詞:汽車評(píng)價(jià)
李玉珍 葉春林 毛萬(wàn)鑫
(1.上汽通用五菱汽車有限公司,廣西 柳州 545007;2.武漢理工大學(xué)機(jī)電工程學(xué)院,湖北 武漢 430070)
0 引言
隨著社會(huì)經(jīng)濟(jì)的發(fā)展與進(jìn)步,家用汽車的數(shù)量逐漸增多,用戶的駕駛水平也有所提升。用戶對(duì)輕型汽車駕駛性的需求也在不斷地提高,對(duì)動(dòng)力性、舒適性以及NVH等性能的要求更加嚴(yán)格,這就對(duì)車企整車開發(fā)的技術(shù)提出了更高的要求。汽車的駕駛性是在汽車縱向行駛過程中人車交互的綜合感知,包括汽車的靜態(tài)性能和動(dòng)態(tài)響應(yīng)能力。汽車的駕駛性可以體現(xiàn)車型的定位和品牌的能力,是影響產(chǎn)品市場(chǎng)競(jìng)爭(zhēng)力的重要因素。在滿足安全性和經(jīng)濟(jì)性的前提下,舒適性和人性化必將成為未來(lái)輕型汽車性能開發(fā)的主要方向[1]。
1 駕駛性評(píng)價(jià)方法
可以從不同角度、使用不同方法對(duì)汽車的駕駛性能進(jìn)行評(píng)價(jià)。目前常用的方法主要有主觀評(píng)價(jià)和客觀評(píng)價(jià)。由于駕駛性的構(gòu)成較為復(fù)雜,包括汽車在不同方向上的動(dòng)態(tài)響應(yīng),因此主觀評(píng)價(jià)可以從汽車駕駛的多個(gè)維度進(jìn)行評(píng)價(jià);客觀評(píng)價(jià)能對(duì)汽車的駕駛性進(jìn)行量化,通過分析可以將汽車駕駛性與車輛性能的參數(shù)結(jié)合在一起,從而指導(dǎo)開發(fā)性能參數(shù)。主客觀評(píng)價(jià)汽車駕駛性針對(duì)的是汽車不同狀態(tài)下的性能。客觀評(píng)價(jià)主要對(duì)車輛的穩(wěn)態(tài)性能進(jìn)行評(píng)估;而主觀評(píng)價(jià)主要是對(duì)車輛的瞬態(tài)品質(zhì)進(jìn)行評(píng)估[2]。
1.1 主觀評(píng)價(jià)
主觀評(píng)價(jià)是指駕駛員在駕駛時(shí)可以通過五官和身體的內(nèi)部感覺對(duì)車輛的動(dòng)態(tài)響應(yīng)做出主觀評(píng)價(jià)。國(guó)外企業(yè)使用AUDIT評(píng)價(jià)法、SAE主觀評(píng)車標(biāo)準(zhǔn)以及日本的五分制打分等。國(guó)內(nèi)駕駛性評(píng)價(jià)起步較晚,但近幾年,國(guó)內(nèi)企業(yè)和研究機(jī)構(gòu)都開展了對(duì)駕駛性主觀評(píng)價(jià)的相關(guān)研究,例如中國(guó)汽車研究中心2017年發(fā)布了EV-TEST主觀評(píng)價(jià)管理規(guī)則,其評(píng)分方法見表1。
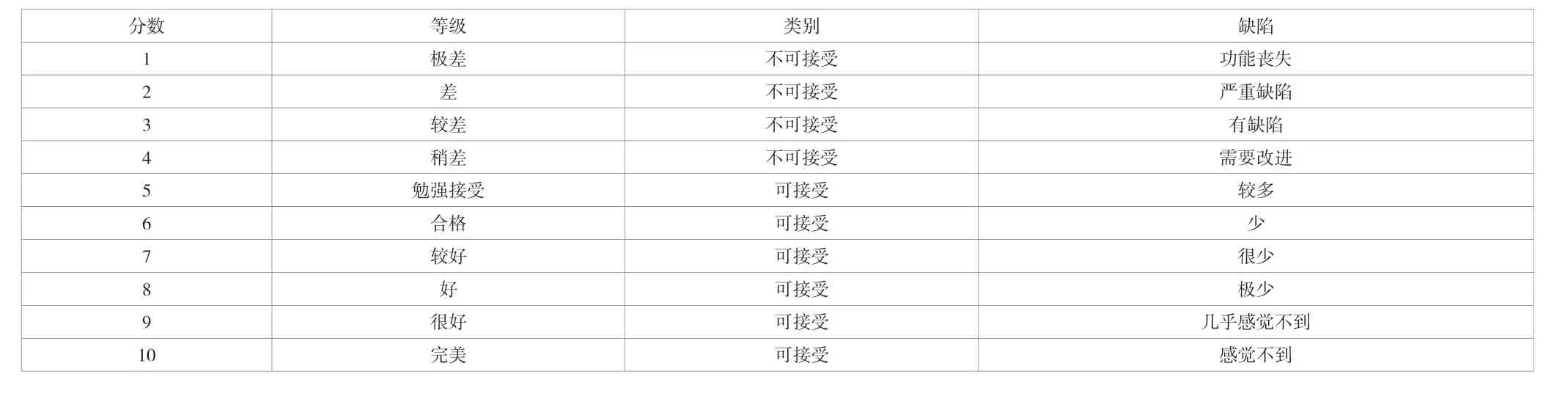
表1 EV-TEST評(píng)分方法
國(guó)外相關(guān)學(xué)者使用不同方法對(duì)汽車的駕駛性進(jìn)行綜合評(píng)價(jià),例如駕駛性指標(biāo)體系構(gòu)建、多元線性回歸虛擬評(píng)價(jià)、神經(jīng)網(wǎng)絡(luò)虛擬評(píng)價(jià)以及仿真分析與測(cè)試評(píng)價(jià)方法等。國(guó)內(nèi)也在開展相關(guān)研究,并逐步形成了基于模糊理論、動(dòng)態(tài)規(guī)劃等算法的駕駛性評(píng)價(jià)方法。
1.2 客觀評(píng)價(jià)
客觀評(píng)價(jià)是指在特定工況下通過一系列傳感器對(duì)車輛進(jìn)行測(cè)試,采集車輛的控制參數(shù)和狀態(tài)參數(shù),分析所得的結(jié)果并建立汽車相關(guān)性能與參數(shù)之間的聯(lián)系。在汽車的行駛過程中,加速度和速度對(duì)人類感覺與知覺的影響最為突出,不同方向上加速度的大小表征了車輛的不同性能。在行駛方向(X向)上,速度和加速度的大小表征汽車的動(dòng)力性;橫向(Y向)的速度與加速度的大小表征汽車轉(zhuǎn)向的穩(wěn)定性;縱向(Z向)的速度與加速度的大小表征汽車的乘坐舒適性。客觀評(píng)價(jià)可以通過汽車客觀表征出來(lái)的指標(biāo)參數(shù)定量地分析駕駛品質(zhì)存在差異的內(nèi)在原因,為車型開發(fā)及優(yōu)化提供指導(dǎo)性建議。
國(guó)外已經(jīng)發(fā)表了關(guān)于駕駛性研究的成果,英國(guó)巴斯大學(xué)的Pickering,S.G致力于駕駛性主客觀評(píng)價(jià)一致性的研究[3]。利用多元線性回歸理論對(duì)相同工況的主觀評(píng)價(jià)指標(biāo)與客觀參數(shù)進(jìn)行回歸分析,得到客觀參數(shù)與主觀評(píng)分之間的多元線性回歸方程,建立了通過客觀參數(shù)對(duì)主觀駕駛性進(jìn)行預(yù)測(cè)的回歸模型。奧地利公司AVL推出駕駛性客觀評(píng)價(jià)與標(biāo)定的工具AVL-Drive,通過三向加速度傳感器測(cè)量車輛的運(yùn)動(dòng)狀態(tài),并使用遺傳算法和神經(jīng)網(wǎng)絡(luò)算法綜合評(píng)價(jià)汽車的駕駛性。
國(guó)內(nèi)駕駛性評(píng)價(jià)起步較晚,同濟(jì)大學(xué)的章桐、劉普輝構(gòu)建了汽車駕駛性的評(píng)價(jià)準(zhǔn)則及指標(biāo),分析穩(wěn)態(tài)加速、急踩加速踏板2項(xiàng)工況中各項(xiàng)客觀表征的指標(biāo),可以對(duì)車輛的駕駛性進(jìn)行客觀地評(píng)價(jià)[4]。2015年王勐將基于AVL-Drive的AMT駕駛性評(píng)價(jià)應(yīng)用到陜汽某牽引車上,對(duì)測(cè)試結(jié)果進(jìn)行評(píng)估分析,得出車輛在性能方面存在不足,并對(duì)其進(jìn)行了優(yōu)化[5]。
2 加速工況指標(biāo)確定
對(duì)車輛行駛的行為進(jìn)行拆分,通常可以分為起步、加速、突然踩油門、突然松油門、松油門滑行、換擋、巡航、怠速、油門響應(yīng)、啟動(dòng)、關(guān)機(jī)以及震動(dòng)共13種工況。不同的駕駛工況對(duì)車輛駕駛品質(zhì)的影響也有所不同,因此需要研究能反映對(duì)應(yīng)工況的駕駛性評(píng)價(jià)指標(biāo)。加速工況是指駕駛員操作加速踏板使其開度變大的過程,加速可以提升車輛的速度。車輛加速工況的駕駛性表現(xiàn)在響應(yīng)是否迅速、加速過程是否平順2個(gè)方面。由對(duì)加速工況的定義可知,加速過程中的主要操作對(duì)象是油門踏板,根據(jù)操作踏板的不同方式,可以將加速工況分為2種情況進(jìn)行評(píng)價(jià),即全油門加速工況與部分油門加速工況。以下分別對(duì)2種加速工況的評(píng)價(jià)指標(biāo)進(jìn)行分析。
2.1 全油門加速
全油門加速工況是指在加速過程中油門踏板處于滿載位置。全油門加速工況主要考察車輛在滿載時(shí)的動(dòng)力性能,可以進(jìn)一步分為爬坡能力、最高車速、凈加速能力以及動(dòng)力儲(chǔ)備能力等方面的性能評(píng)價(jià)指標(biāo)[6]。
2.1.1 爬坡能力
汽車的爬坡能力是指汽車滿載時(shí),在良好路面上用一擋行駛所能克服的最大坡度。通常用最大爬坡度表示,如公式(1)所示。

式中:imax為汽車的最大爬坡度,%;αmax為汽車所能越過的最大坡度,°。
如果要求汽車有足夠的爬坡能力,那么載貨汽車30%,越野汽車imax的值大約為在60%。汽車最大爬坡度的測(cè)試方法如下:選擇與該車預(yù)計(jì)爬坡度相近的坡道,坡道長(zhǎng)度應(yīng)大于25 m,坡前應(yīng)有8 m~10 m的平直路段[7]。測(cè)試車停在坡底靠近坡道的平直路段上,變速器放置在最大牽引力的輸出擋(通常是一擋)。汽車起步后,將加速踏板踩到底進(jìn)行爬坡,如果汽車能順利爬上該坡道,就選擇更大一級(jí)坡道進(jìn)行測(cè)試,直到汽車不能爬上坡道為止,測(cè)試中汽車能爬上的最大坡度,就是汽車的最大爬坡度。
2.1.2 最高車速
需要考察全油門加速工況下車輛能達(dá)到的最高車速,它反映了車輛的動(dòng)力性能。影響汽車最高車速的因素比較多,例如汽車發(fā)動(dòng)機(jī)的功率、發(fā)動(dòng)機(jī)的最大轉(zhuǎn)矩、最大轉(zhuǎn)矩時(shí)的轉(zhuǎn)速、傳動(dòng)系的傳動(dòng)比以及行駛阻力等。因?yàn)樽罡哕囁偈窃谄教篃o(wú)風(fēng)路面上、加速度為0時(shí)求得的,因此坡度阻力和加速阻力為0;所以影響最高車速的阻力因素主要是空氣阻力和滾動(dòng)阻力。
2.1.3 凈加速能力
凈加速能力主要考察的是在不考慮道路狀況、駕駛行為等因素時(shí),車輛加速到一定車速的綜合性能,要求車輛能快速響應(yīng)、平順地達(dá)到理想車速。評(píng)價(jià)凈加速能力的指標(biāo)有加速時(shí)間、95%峰值加速度等。具體指標(biāo)及描述見表2。

表2 凈加速能力指標(biāo)
2.1.4 動(dòng)力儲(chǔ)備能力
動(dòng)力儲(chǔ)備能力又可以稱為超車能力,主要考慮了車輛在直線行駛中超車時(shí)的綜合性能。與凈加速能力不同,考察動(dòng)力儲(chǔ)備能力的加速時(shí)間要求車輛到達(dá)一定初速度才開始全油門操作,這是為了模擬現(xiàn)實(shí)中的真實(shí)超車場(chǎng)景。動(dòng)力儲(chǔ)備能力的具體指標(biāo)及描述見表3。

表3 動(dòng)力儲(chǔ)備能力指標(biāo)
2.2 部分油門加速
日常駕駛中絕大多數(shù)加速行為都不是全油門加速,而是部分油門加速。因此,需要著重考察部分油門下的車輛駕駛品質(zhì)。部分油門加速工況主要用來(lái)評(píng)估車輛在部分油門操作下動(dòng)態(tài)性能的表現(xiàn),其主要指標(biāo)包括峰值加速度、加速度增益、加速度擾動(dòng)以及線性相關(guān)度等。試驗(yàn)的具體做法是通過在油門踏板上安裝限位器,測(cè)定試驗(yàn)車在不同油門深度下的各項(xiàng)特性指標(biāo)。
2.2.1 加速度增益
加速度增益是指加速度值與油門開度的比值,反映了單位油門開度下加速度值的大小,是加速工況下的1項(xiàng)重要評(píng)價(jià)指標(biāo),它可以作為加速度峰值及加速時(shí)間等宏觀指標(biāo)的補(bǔ)充。
2.2.2 線性相關(guān)性
線性相關(guān)性是指扭矩與油門踏板開度的比值,反映了車輛在加速時(shí)的平順性。
2.2.3 加速度擾動(dòng)
由于發(fā)動(dòng)機(jī)的不穩(wěn)定區(qū)域被利用,因此傳動(dòng)系扭轉(zhuǎn)或者彎曲振動(dòng)等會(huì)造成發(fā)動(dòng)機(jī)和被驅(qū)動(dòng)的車輪之間動(dòng)力傳遞的不均勻性,有可能會(huì)出現(xiàn)振動(dòng),該振動(dòng)通過方向盤或者車身傳遞過來(lái),使人能夠感到轟鳴或者抖動(dòng)。加速度擾動(dòng)情況可以用加權(quán)加速度四次均方根值來(lái)表示,又稱為振動(dòng)劑量值(surge)。其計(jì)算方法,如公式(2)所示。

式中:acci為車輛加速度值;i為樣本數(shù)據(jù)點(diǎn)序號(hào);n為樣本總數(shù)量。
3 駕駛性試驗(yàn)
駕駛性客觀評(píng)價(jià)是通過車輛狀態(tài)參數(shù)來(lái)評(píng)價(jià)車輛的性能,其基礎(chǔ)是汽車在行駛過程中實(shí)際響應(yīng)的客觀物理量,因此駕駛性客觀評(píng)價(jià)依賴于實(shí)車測(cè)試。
3.1 試驗(yàn)車輛及工況
試驗(yàn)車輛是采用某車企SUV車型,車輛狀態(tài)及性能良好,車輛各項(xiàng)參數(shù)見表4。
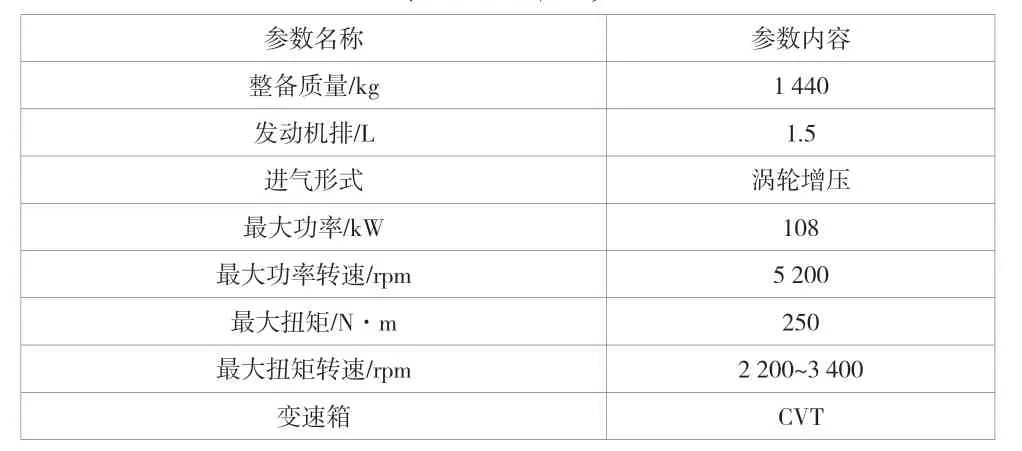
表4 試驗(yàn)車輛參數(shù)
試驗(yàn)工況選擇汽車場(chǎng)景中最為常見的“加速”工況,對(duì)汽車加速行駛過程的相關(guān)參數(shù)進(jìn)行測(cè)試,根據(jù)參數(shù)分析并客觀評(píng)價(jià)車輛的駕駛性,例如車輛加速的動(dòng)力性、平順性等。試驗(yàn)車輛如圖1所示。

圖1 試驗(yàn)所用車輛
3.2 試驗(yàn)設(shè)備
試驗(yàn)采用AVL-Drive數(shù)據(jù)采集儀,并配套使用AVL-Drive數(shù)據(jù)采集軟件對(duì)車輛參數(shù)進(jìn)行測(cè)試。車輛中安裝數(shù)據(jù)采集儀及其相關(guān)配套傳感器,并通過AVL-Drive軟件進(jìn)行測(cè)試,如圖2所示。
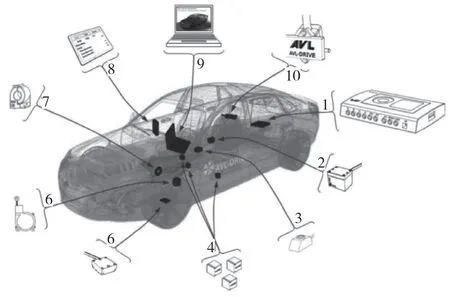
圖2 試驗(yàn)設(shè)備安裝
試驗(yàn)設(shè)備的具體信息見表5。加速度信號(hào)由加速度傳感器對(duì)其進(jìn)行采集,傳感器包括2個(gè)單軸加速度傳感器(分別裝于駕駛位座椅頭枕處和懸掛下擺臂處)和1個(gè)三軸加速度傳感器(裝于副駕駛座椅滑軌末端),其中采樣頻率為100 Hz。其他信號(hào)例如引擎轉(zhuǎn)速、車速等信號(hào)通過CAN總線連接進(jìn)行讀取。
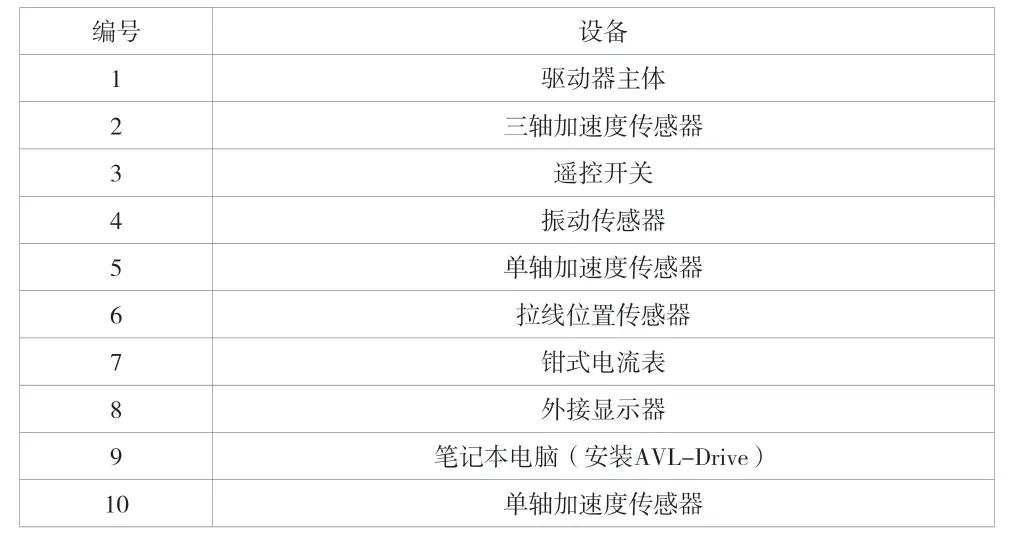
表5 試驗(yàn)設(shè)備
試驗(yàn)場(chǎng)地選擇某主機(jī)廠封閉試驗(yàn)場(chǎng)地,保障試驗(yàn)的安全性。對(duì)加速工況進(jìn)行試驗(yàn)并截取車輛從靜止到加速過程中的速度、加速度、油門開度以及時(shí)間點(diǎn)等重要參數(shù),處理并分析車輛的加速性能。
4 專業(yè)化評(píng)價(jià)體系平臺(tái)搭建
基于Matlab GUI平臺(tái)并結(jié)合駕駛性評(píng)價(jià)體系,開發(fā)了駕駛性試驗(yàn)數(shù)據(jù)后處理軟件平臺(tái),對(duì)試驗(yàn)數(shù)據(jù)進(jìn)行計(jì)算,可以得到各駕駛性評(píng)價(jià)指標(biāo)的值。針對(duì)該文研究的加速工況,搭建了駕駛性評(píng)價(jià)平臺(tái),如圖3所示。
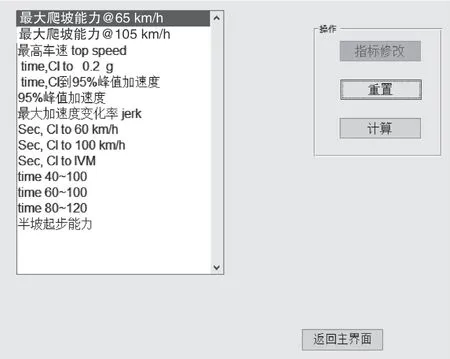
圖3 加速工況軟件平臺(tái)界面
對(duì)試驗(yàn)車輛加速工況的駕駛性指標(biāo)進(jìn)行計(jì)算,通過與對(duì)標(biāo)車進(jìn)行對(duì)比,從而為優(yōu)化車輛的駕駛性能提供指導(dǎo)意見。試驗(yàn)車與對(duì)標(biāo)車的主要參數(shù)對(duì)比見表6。
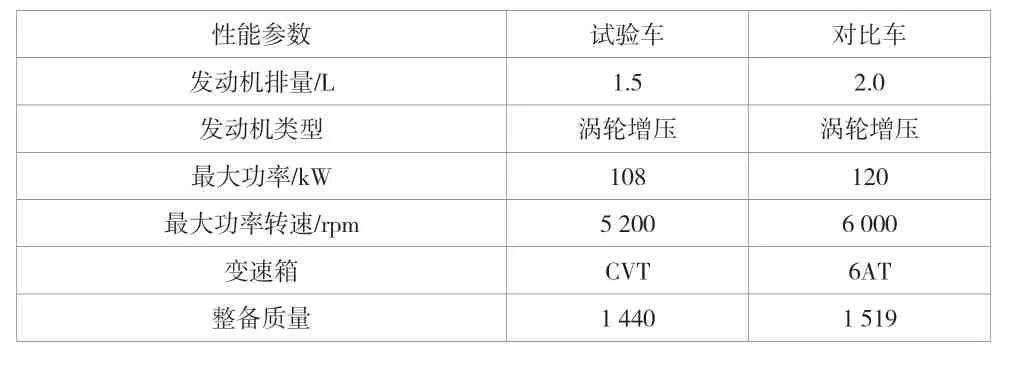
表6 試驗(yàn)車與對(duì)標(biāo)車主要參數(shù)對(duì)比
圖4為試驗(yàn)車和對(duì)標(biāo)車在不同油門開度下的速度對(duì)比。由圖4知,在5%~35%油門開度加速中,試驗(yàn)車的加速能力優(yōu)于對(duì)標(biāo)車,而對(duì)標(biāo)車在小油門加速中較柔和、平順。
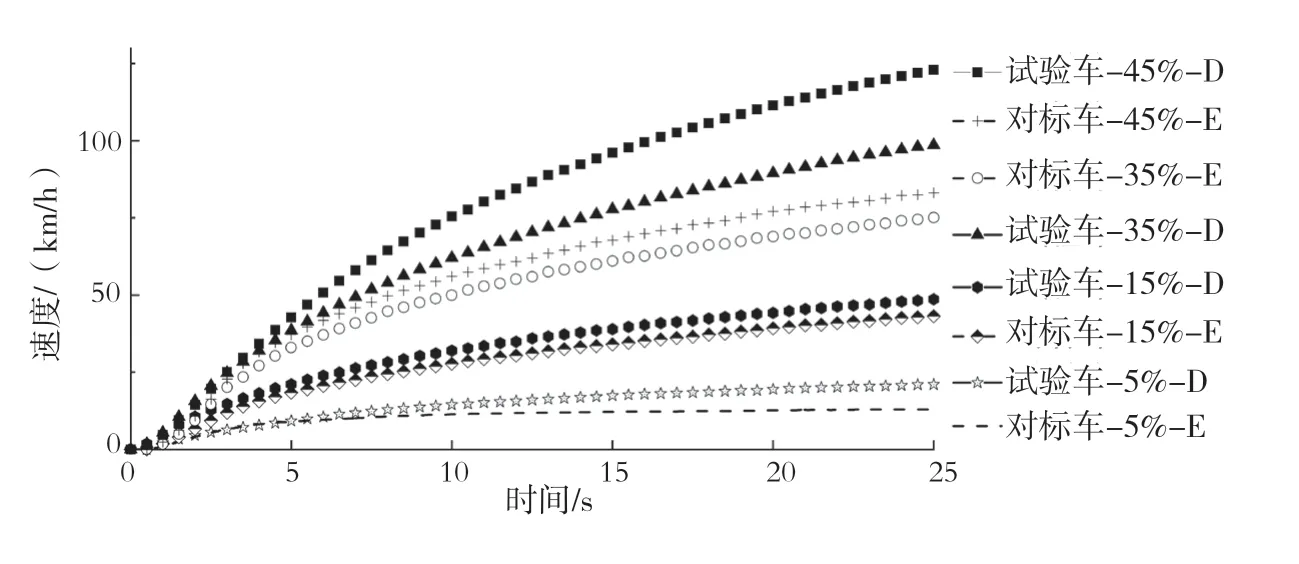
圖4 固定油門工況速度曲線對(duì)比
圖5為試驗(yàn)車和對(duì)標(biāo)車的全油門加速度對(duì)比。在全油門加速中,試驗(yàn)車出現(xiàn)峰值加速度的時(shí)間早于對(duì)標(biāo)車,對(duì)標(biāo)車峰值加速度的持續(xù)時(shí)間比試驗(yàn)車的持續(xù)時(shí)間長(zhǎng)。峰值加速度區(qū)間的持續(xù)時(shí)間越長(zhǎng)就越能增強(qiáng)車輛的加速性能,因此全油門加速中,對(duì)標(biāo)車的加速性能優(yōu)于試驗(yàn)車。
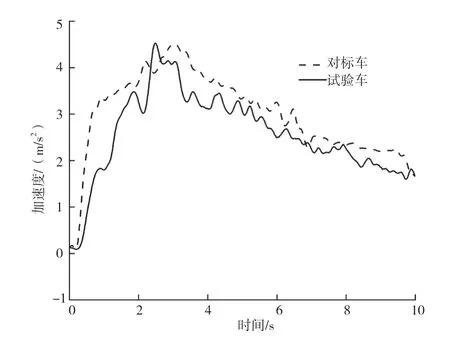
圖5 全油門加速工況加速度對(duì)比
根據(jù)軟件平臺(tái)計(jì)算的指標(biāo),針對(duì)全油門加速工況中存在的轉(zhuǎn)速波動(dòng)進(jìn)行優(yōu)化,優(yōu)化后的轉(zhuǎn)速曲線在最大值、最大值持續(xù)時(shí)間及曲線平滑度上明顯優(yōu)于優(yōu)化前。優(yōu)化對(duì)比結(jié)果如圖6所示。
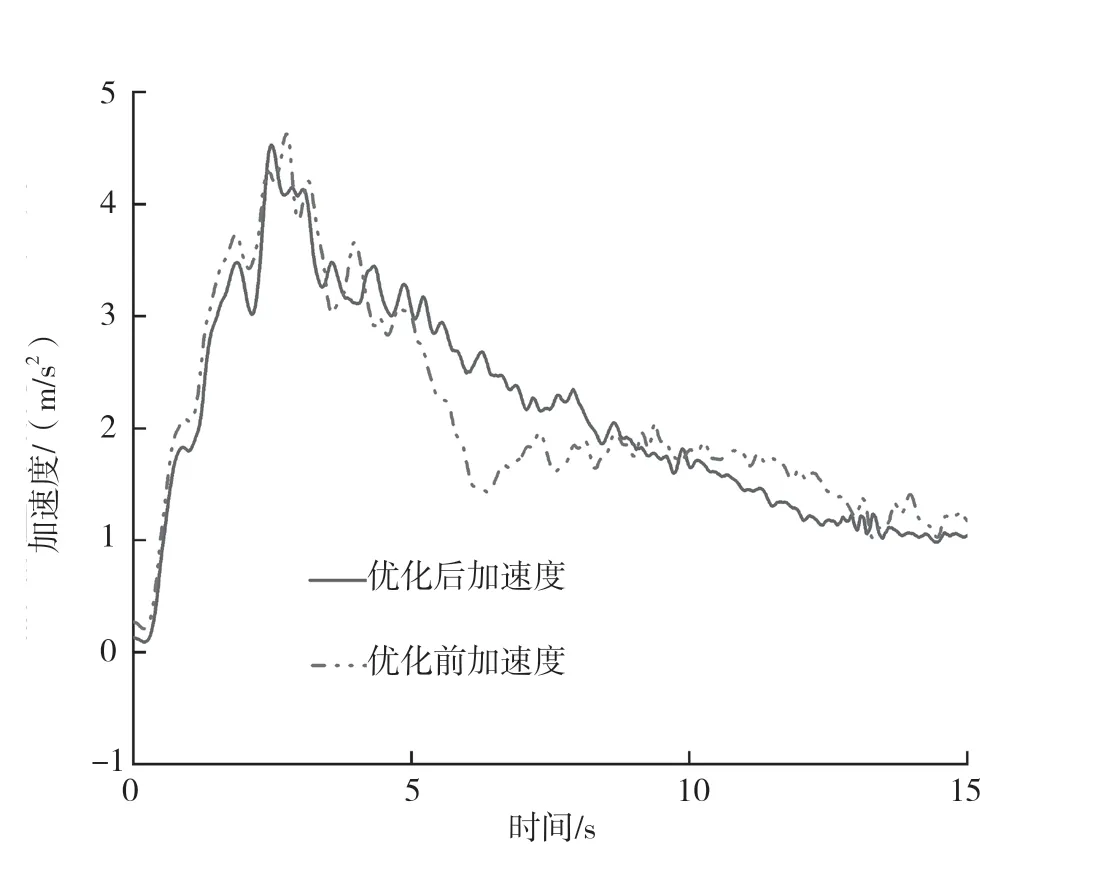
圖6 優(yōu)化前后對(duì)比
5 結(jié)論
通過分析車輛加速工況的特點(diǎn)以及對(duì)駕駛品質(zhì)的要求,并結(jié)合相關(guān)標(biāo)準(zhǔn)建立了車輛加速工況的駕駛性評(píng)價(jià)體系,確定了峰值加速度、加速時(shí)間、加速度增益以及加速度擾動(dòng)等評(píng)價(jià)指標(biāo)。
試驗(yàn)采用AVL-Drive數(shù)據(jù)采集儀,并配套使用AVL-Drive數(shù)據(jù)采集軟件對(duì)試驗(yàn)車與對(duì)標(biāo)車進(jìn)行了加速工況駕駛性的試驗(yàn),對(duì)車輛的加速度、油門、發(fā)動(dòng)機(jī)、變速箱以及車速等信號(hào)數(shù)據(jù)進(jìn)行采集。
基于Matlab GUI平臺(tái)并結(jié)合駕駛性評(píng)價(jià)體系,開發(fā)了駕駛性試驗(yàn)數(shù)據(jù)后處理軟件平臺(tái),計(jì)算得到各駕駛性評(píng)價(jià)指標(biāo)的值。并根據(jù)駕駛性指標(biāo)的對(duì)比,針對(duì)試驗(yàn)車全油門加速工況中存在的轉(zhuǎn)速波動(dòng),對(duì)試驗(yàn)車進(jìn)行優(yōu)化,優(yōu)化后轉(zhuǎn)速曲線在最大值、最大值持續(xù)時(shí)間及曲線平滑度上明顯優(yōu)于優(yōu)化前。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2021年10期)2021-03-02 05:52:06
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時(shí)代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
中國(guó)教育技術(shù)裝備(2015年19期)2015-03-01 02:43:07
中國(guó)工程咨詢(2015年2期)2015-02-14 02:59:26
決策探索(2014年21期)2014-11-25 12:29:50
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
體育師友(2012年4期)2012-03-20 15:30:10
