Indra 二次雷達速度跳變分析處理
2021-05-07 06:12:08
數(shù)字通信世界 2021年4期
關鍵詞:信號
(民航云南空管分局,云南 昆明 650200)
0 引言
我國民航事業(yè)迅猛發(fā)展,航班量顯著增長。以云南管制區(qū)為例,隨著昆明長水國際機場投入運行,旅客及貨郵翻倍增加,云南空中管制安全保障壓力日益增長。在巨大的航班量和安全壓力下,穩(wěn)定可靠的雷達監(jiān)視信號質(zhì)量對管制部門就至關重要了。
目前,全國有22 套西班牙INDRA 公司20 MP/L MODE-S 單脈沖二次雷達應用在空管系統(tǒng),僅云南管制區(qū)就有3套。對該雷達目標速度相關故障分析及排查,對類似問題排查可提供思路及借鑒。
1 Indra 二次雷達目標速度跳變情況概述
云南某雷達站Indra 二次雷達在S 模式和A/C 模式下均出現(xiàn)部分目標速度跳變情況,該站點切換雷達工作通道故障現(xiàn)象無改善。
雷達目標速度跳變范圍從20 Nm/h 至1 200 Nm/h 隨機出現(xiàn),其中,個別雷達目標除航班速度跳變外,還出現(xiàn)目標分裂、位置倒退的情況。如圖1所示。
2 二次雷達目標速度測算原理

圖1 速度跳變目標航跡圖
航跡跟蹤是基于天線掃描到掃描之間的航跡和點跡之間的相關處理實現(xiàn)的。不斷測量一個目標的位置,將點跡和航跡文件中的航跡進行相關處理,并進行平滑濾波,才能連成航跡[1]。繼而計算出目標的速度和航向,外推出航跡的未來位置,這一系列的處理稱之為跟蹤。能夠在天線不斷掃描過程中對幾十批或更多的目標實行跟蹤,是邊跟蹤邊掃描(Tracks-While-Scan)系統(tǒng)的任務。
完成跟蹤后,計算出目標速度。簡單理解為在一個更新周期(4 s)內(nèi)前后兩個點之間的位移量(距離矢量)與更新周期(4 s)的比值即為速度。
3 故障排查思路
3.1 航跡跟蹤處理部分排查
根據(jù)二次雷達測速原理,首先排查航跡跟蹤處理相關板件,切換雷達工作通道,速度跳變未改善。并更換航跡跟蹤處理相關板件MCPU 板及詢問脈沖產(chǎn)生單元MICA03板,目標速度跳變情況均無明顯改善。
因Indra 雷達航跡跟蹤處理相關板件數(shù)據(jù)讀取自SLG(本地監(jiān)控)系統(tǒng),前期排除板件后,以另一雷達站SLG(本地監(jiān)控)系統(tǒng)軟件(另一雷達站目標速度正常)鏡像為基本,修訂相應本地參數(shù),制作雷達站新SLG 系統(tǒng),重啟加載數(shù)據(jù),觀察目標速度跳變情況仍無明顯改善。
綜合以上兩點,排除因航跡跟蹤處理板件異常導致雷達目標速度跳變,并且推斷速度計算錯誤是因為目標位置探測出錯導致的。
3.2 目標探測部分排查
在自動化終端與其他站點雷達數(shù)據(jù)對比,覆蓋區(qū)域內(nèi)目標與其他站點雷達目標位置基本一致,其中距離、高度一致,未見明顯異常。該站點雷達提供一部分目標速度與其他站點不一致點,存在跳變現(xiàn)象。
因覆蓋區(qū)域內(nèi)目標與其他站點位置基本一致,可得知該站點雷達對航空器應答碼處理過程正常,雷達與目標之間距離處理過程正常。為進一步分析目標速度跳變原因,選取部分平飛目標,從方位、方位差、速度、速度差以及點跡情況進行記錄。如表1所示。
通過數(shù)據(jù)統(tǒng)計,可見當一個點不準確時,會導致與下一個點間的偏差過大,當目標方位信息發(fā)生較大擺動時,目標速度也會聯(lián)動的發(fā)生跳變。觀察航跡則直觀地反映出目標在方位上的不準確導致整個航跡不均勻及不平滑。
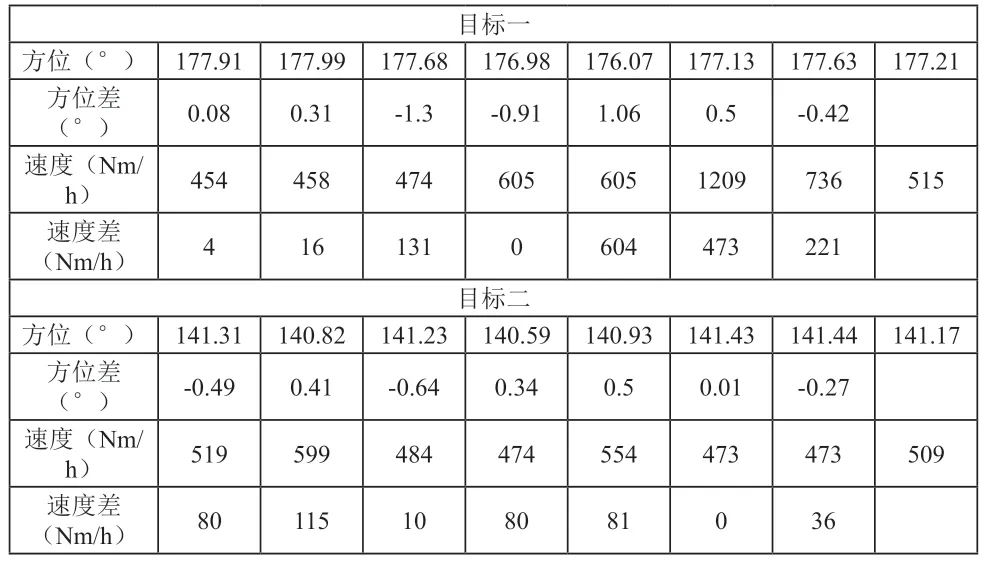
表1 平飛雷達目標數(shù)據(jù)統(tǒng)計表
綜上所述,基本確定該雷達速度跳變是因該雷達方位探測不準確引起。下一步重點為排查方位探測幾個因素。
3.3 方位探測要素排查
Indra 二次雷達使用單脈沖測角技術獲取目標的方位信息。單脈沖測角技術獲取目標方位需要三個要素,即天線波束指向角、目標偏離瞄準軸角度和符號信息。其中,天線波束指向角,由天線編碼器給出;目標偏離瞄準軸角度,可使用歸一化差信號,通過和差比的幅值信息得出目標偏離瞄準軸的信息(OBA);符號信息,即目標相對于瞄準軸偏左或偏右的信息,可通過測試和信號與差信號之間的相對相位關系來確定。目標方位與天線波束指向角和偏離角度的關系如圖2所示。

圖2 單脈沖測角示意圖
由此可得:
目標方位(Target Azimuth)=天線波束指向角(Antenna Azimuth)±偏離角(ΔAzimuth)。
分析得知,如天線波速指向角偏差會造成所有雷達目標方位均造成同樣偏差。因該站速度跳變?yōu)椴糠帜繕耍以谕粫r間跳變目標的方位變化無定向規(guī)律,實際操作中切換雷達編碼器,目標跳變無改善,也印證了天線波束指向角偏差不是導致速度跳變的成因。
由符號信息(瞄準軸偏左或偏右的信息)偏差造成所有雷達目標方位均造成同樣規(guī)律,因該站速度跳變?yōu)椴糠帜繕耍以谕粫r間跳變目標的方位變化無定向規(guī)律,該原因造成速度跳變概率低。因此,下一步排查重點為目標偏離瞄準軸角度構成要素。
3.4 目標偏離瞄準軸角度排查
單脈沖檢波器接收Σ/Δ 信號生成單脈沖視頻,最終以量化電壓值表示,其中,Σ/Δ 信號的幅度比值表示目標偏離天線瞄準軸角度的大小,最終以單脈沖電壓值的大小來表示。
具體來看,在Indra 雷達本地監(jiān)控終端SLG 上,由歸一化的差信號強度得出單脈沖表。單脈沖表是在雷達設置在常規(guī)模式下,錄取器對150個獨立無干擾目標統(tǒng)計結果的平均值。單脈沖表中的數(shù)值,即量化電壓值,是數(shù)值化的單脈沖視頻與ACP 脈沖數(shù)的關系,單位為1/4ACPS。量化電壓值的大小對應目標偏移瞄準軸的角度的大小;量化電壓值前面+/-符號,即表示目標位于天線瞄準軸的左側或右側。
如圖3 所示,最左列數(shù)值表示數(shù)字化單脈沖視頻,即量化電壓值;右邊數(shù)值對應1/4ACP 的個數(shù),可以由此計算偏離角度。比如,量化電壓值+1005,對應的1/4ACP 個數(shù)為+152,計算可得ACP 個數(shù)為+152*(1/4A CP)=+38ACP,則對應角度計算+38*360o/16384=+0.8o,即偏離角度為為+0.8o。

圖3 Indra雷達OBA表
分析得知,和(Σ)通道核心功能為探測目標有無,差通道核心功能為探測目標相位。臺站使用臺站原SLG及普洱SLG 均無法生成新OBA 表,目標數(shù)一直為0。由此判斷Σ/Δ 信號的電氣相位特性已經(jīng)異常。因雷達目標除方位及速度其他數(shù)據(jù)均無明顯異常,可判定和通道無異常。
當差(Δ)通道的相位異常抖動和變化時,如果目標恰好在瞄準軸一側抖動則會導致速度計算錯誤,速度跳變。當抖動跨過瞄準軸,則引入超過180°的相差,就可能導致目標倒退、分裂等異常情況。因此,可確定此次目標速度跳變原因為差通道相位異常。
3.5 差通道排查及處理
差波束用于詢問機實現(xiàn)單脈沖功能,通常Indra 系統(tǒng)工作范圍為天線視軸附近2.3°內(nèi),天線視軸有效寬度為5.6°[2]。天線端和波束的相位是相同的,而差波束天線主瓣兩側的相位不同,并且左邊的相位相對為+0°,右邊的相位相對為+180°。如圖4所示。

圖4 差波束水平方向圖
在雷達信號接收過程中,目標產(chǎn)生的1090 MHz 應答信號經(jīng)天線的和(Σ)、差(Δ)與控制(Ω)通道同時接收,經(jīng)旋轉鉸鏈、射頻切換開關和TRA 單元,送往接收機。在接收機中,和信號與差信號送到單脈沖檢測器,由此得到單脈沖視頻信號。具體來講,目標1090 MHz 應答信號經(jīng)射頻放大、濾波,與1030MHz 本振信號混頻,產(chǎn)生60 MHz 中頻信號;60 MHz 中頻信號,經(jīng)過中頻放大、中頻濾波,再經(jīng)GTC 控制,而后和差(Σ/Δ)信號送到單脈沖檢測器,產(chǎn)生單脈沖視頻信息。
因切換通道,故障現(xiàn)象無改善,故排除TRA 單元及之后雙通道部件,排查重點放置于旋轉鉸鏈、射頻切換開關、差通道饋線及各鏈接頭等公共部分。
旋轉鉸鏈后端斷開饋線連接,饋線前端連接假負載,使用網(wǎng)絡分析儀(安利2034B)測試于TRA 前端-旋轉鉸鏈后端差通道駐波比,駐波比為1.116。并檢查天線端至TRA 各鏈接頭均緊固,無松動現(xiàn)象。使用網(wǎng)絡分析儀對比測試和、差通道相位差,相位差為6.97°,滿足Σ與Δ 線纜的相位是7°固定差值。由此可排除差通道饋線及各鏈接頭原因造成該現(xiàn)象。
使用網(wǎng)絡分析儀(安利2034B)測試射頻切換開關,該部件外觀未見異常,對比各通道相位,無明顯相位差,由此可排除射頻切換開關因造成該現(xiàn)象。
使用網(wǎng)絡分析儀測試旋轉鉸鏈,該部件外觀未見異常,對比和、差通道相位差,每旋轉90°測量一次其絕對值分別為7.15°、4.25°、9.18°、2.96°。因旋轉鉸鏈Σ 與Δ 通道相位是配平的,超過標稱值≤3°,且四個方位值不一致。因此可以判斷差通道相位異常是由旋轉鉸鏈引入的。現(xiàn)場更換旋轉鉸鏈后OBA 表順利重新生成,目標速度跳變消失,雷達探測功能恢復正常。
4 結束語
本次故障排查以雷達目標生成的原理,建立排查速度跳變故障總體思路。思路為速度計算軟、硬件排查及雷達目標探測兩條線路。排查中按操作難易程度,從簡至繁逐步排查。逐步得到因旋轉鉸鏈老化引起差通道相位異常導致雷達目標速度跳變。隨著Indra 雷達使用年限增加、部件老化,將遇到更多新問題,我們雷達機務員應踏實以原理為基礎,結合故障現(xiàn)象梳理排查思路,逐一細致排查,以期盡快排除故障,為管制部門提供穩(wěn)定可靠地雷達監(jiān)視信號以提高航班正常率和飛行安全。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
