應用物聯網技術的智能停車引導系統
2021-05-07 05:35:56袁珍
黎明職業大學學報 2021年4期
袁 珍
(黎明職業大學 通識教育學院,福建 泉州 362000)
隨著我國綜合國力的提升,汽車的數量越來越多,在一些大城市和沿海經濟發達地區最為明顯。目前,隨著大型商場、住宅小區的出現,大面積多層停車場層出不窮。對于很多新建居民區和商業區而言,停車場管理系統已經成為了配套設施。由于車輛多、停車場面積大,缺乏系統規劃、管理混亂等原因,導致停車場的利用效率低下。用戶需要在駕車入場時尋找空位,離場時取車找車和尋找出口,花費時間較多,容易造成擁堵。這使得車輛的智能引導技術也越來越受到關注。人們更愿意使用一個運行效率高、直觀可靠的可視化引導系統。因此帶圖形界面的空位識別引導停車系統將有著非常廣泛的應用前景。
物聯網技術的發展為解決這一問題提供了很好的思路,可以通過計算機技術、網絡設備、車道管理設備等搭建一套具備空位智能識別、場內車流引導等功能的停車系統,從而為用戶提供更方便、直觀、快捷的停車方法[1-3]。實現智能停車系統是一個復雜的過程,本文在闡述技術實現時,有選擇地涉及其中幾個內容,重點針對無線傳感網絡和輔助停車系統開展研究,研究停車場內精確選擇車位的方式,并構建基于最佳路徑優化選擇的停車輔助系統。
1 無線傳感網絡
無線傳感網絡的主要功能是空位識別和車輛信息登記,這是智能引導的前提。系統會將識別出來的空位體現在車庫環境模型中,方便用戶停車取車,也為后面的路徑引導提供目標位置[4-5]。據此,本系統基于物聯網環境,對停車引導系統的各個模塊芯片進行分析選型,設計硬件電路并進行測試,建立一個集數據采集、分析、控制、引導于一體的無線傳感網絡,為整個停車場方案實施提供硬件基礎。采用了嵌入式模塊作為主控制端,用Zigbee(“紫蜂”,一種低速短距離傳輸的無線網上協議)模塊采集和傳輸信息,再結合多個傳感器構成一個無線傳感網絡,系統框架如圖1所示。
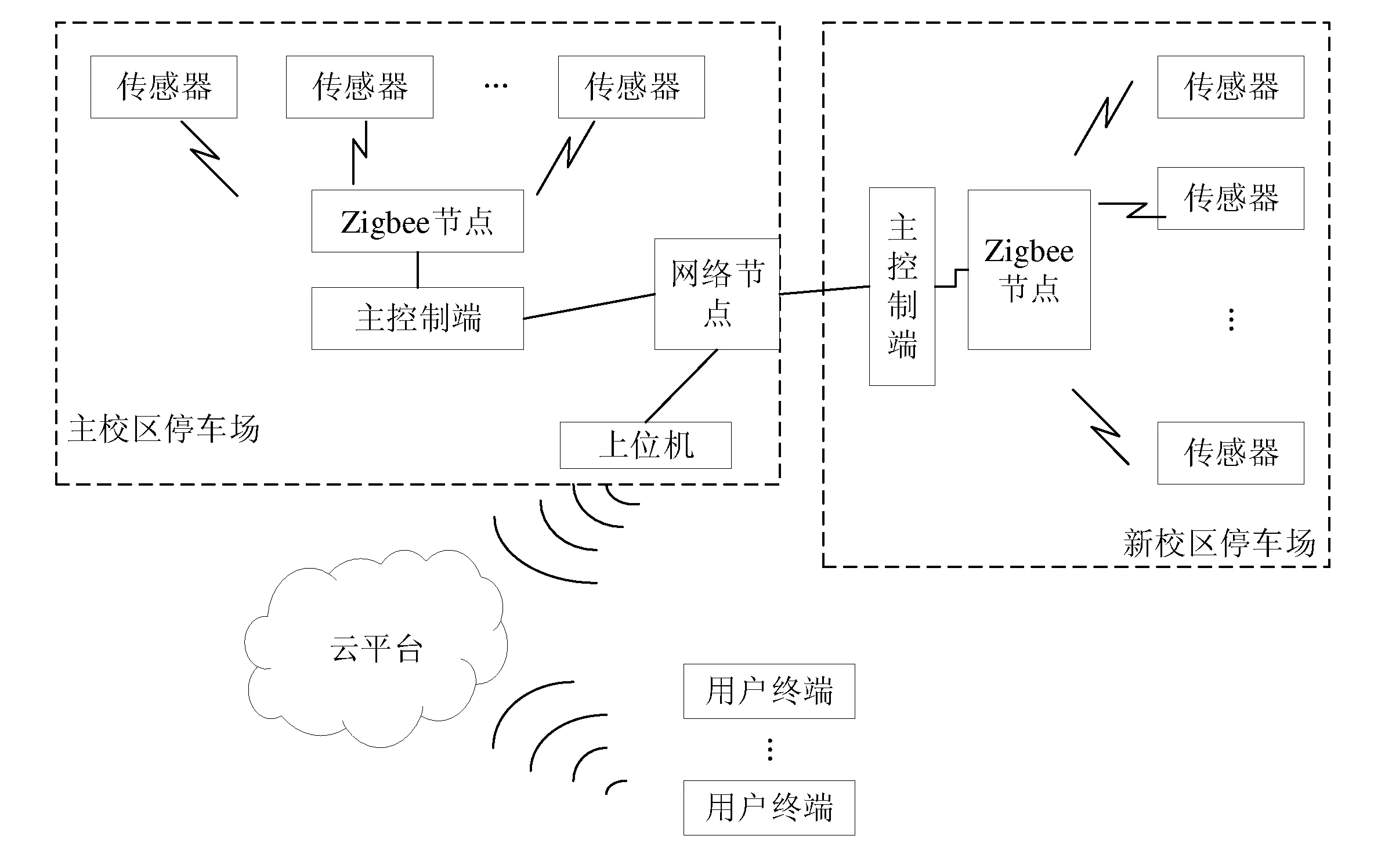
圖1 無線傳感網絡框架
在主控制器的選擇上,考慮到停車場車輛眾多,需要上傳位置信息和車牌信息,并且需要在主控制器上安裝路徑識別算法,因此主控制器必須具備一定的數據處理和存儲能力,在數據處理速度上也有一定的要求。因此,本系統選用了集成ARM(先進的精簡指令集處理器)單片機和DSP(數字信號處理)芯片的LM3S5749,此芯片功耗低、運算精準,同時具備了主控功能和數據處理功能。
空位識別可使用的傳感器有很多種,例如超聲波傳感器、光敏傳感器、紅外檢測器等。經過測試,本系統采用了靈敏度高、分辨率大的磁阻傳感器。目前多數停車場都是用紅外線或超聲波檢測器進行空位識別,而經過調研發現,這兩種傳感器存在著精度低、易損壞等缺陷。在本系統中,空位識別是后期停車線路規劃的前提,需要降低傳感器故障的幾率,提高精度,因此選用的磁阻傳感器更加適合這一場景。
傳感器節點通過IIC(集成電路)總線與Zigbee終端監測節點CC2530連接,監測車位狀態。信息采集終端電路如圖2所示。
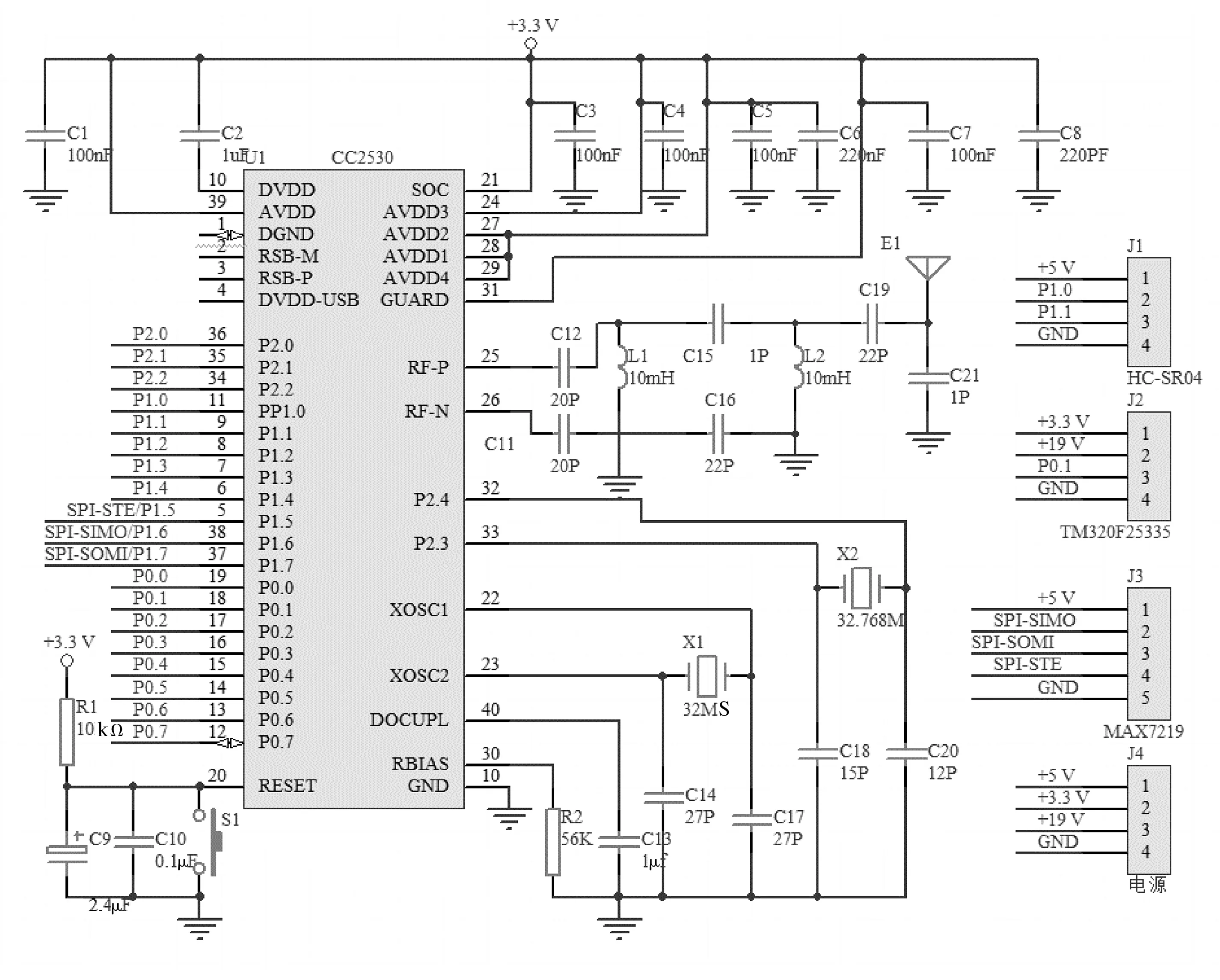
圖2 信息采集終端電路圖
利用Zigbee無線傳輸將信息發送至ARM主控平臺,經過對車位信息的存儲、處理,通過路由節點將信息發送至上位機,通過路由節點的設置實現停車場與汽車用戶之間的消息發送、傳遞與接收。
2 智能誘導停車路徑算法
2.1 選擇最優車位
非智能車位選擇辦法一般是由用戶自行選擇,但由于對停車場不熟悉等原因,選擇的停車位不是最合適的。本算法是從用戶角度看待問題,考慮目標停車位距停車場入口距離、出口距離及兩側車位占用情況等因素,為用戶選擇最合適的停車位。
停車場空位實例及簡化停車場模型為二維有向帶權圖,如圖3、圖4所示。其中Ri為路徑編號,Si為空位編號。
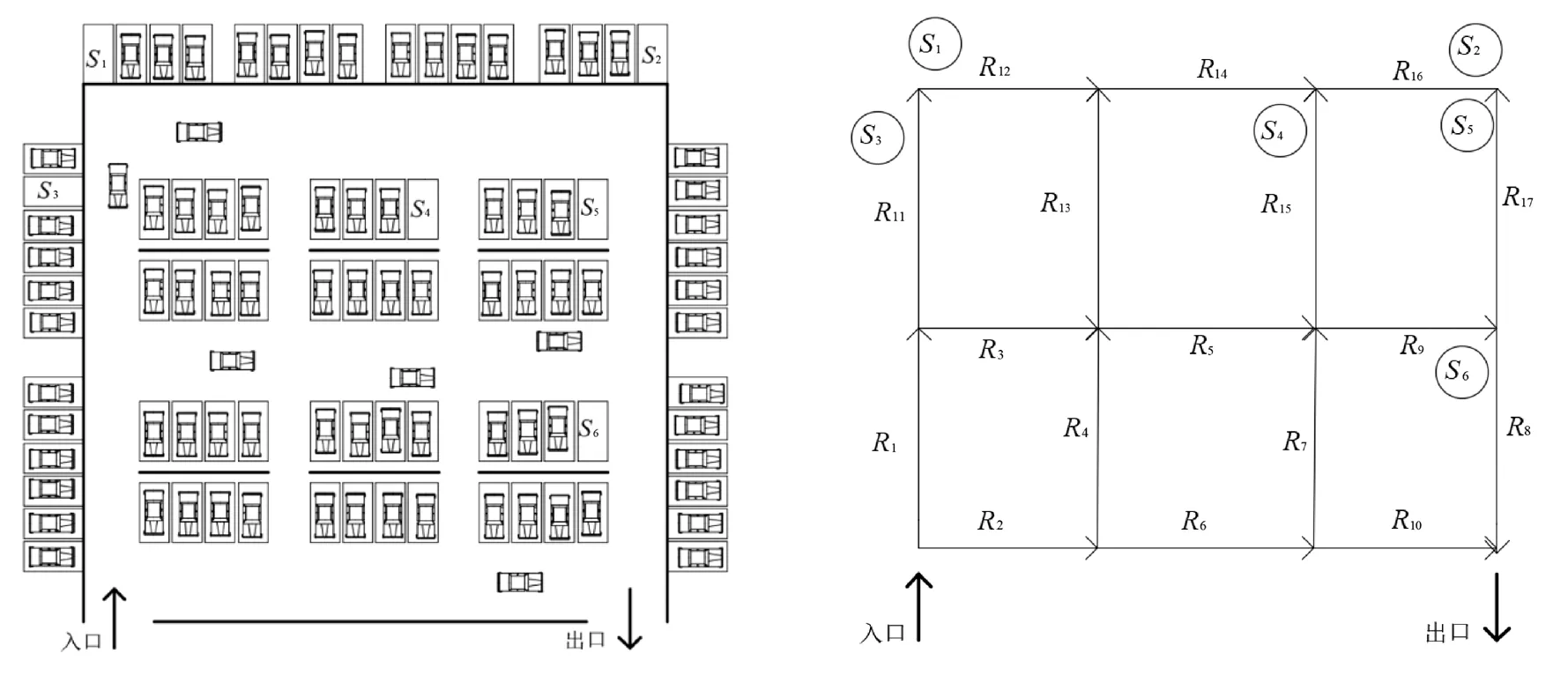
圖3 停車場空位實例圖 圖4 二維有向帶權圖
通過車位檢測模塊得到停車位占用信息,分析行車時間、車位類型等因素,確定若干備選停車位,考慮場內車流量和距離出入口距離等因素賦予每條有效路徑適當的權值。設停車場內每條道路的實際車速為V〈Ri~Rj〉(i,j=1,2,3,…),停車場內車速上限為V1,則某條道路(編號為i~j)上的實時車速為:
(1)
式(1)中μ為車流量系數,通過實際停車場內統計數據得到。
根據式(1)由實際測量的道路距離除以速度即可得到每條道路的權值:
(2)
假設目標路徑長度為D,停車場內車輛行駛平均速度為V1、步行速度平均為V2,由此可計算出用戶從入口至停車位停好車,再步行至出口的總時間如下:
(3)
其中:T′為泊車所需時間;α為時間系數,取值為0~1,可通過改變α的大小來調整行車時間和步行時間的比重。
在本系統的測試過程中,大部分情況下選取α=1,忽略步行時間。根據公式計算入口至各備選停車位的總時間T,當式(3)中T最小時,也就是停車所用時間最短,那么該備選車位即可選為當前目標車位。
2.2 路徑規劃
Dijkstra算法是很經典的單源最短路徑算法,能夠計算出從一個指定節點到其他所有節點的最短行車路線。計算原理是從起始節點開始逐步向外圍搜索,遍歷停車場模型中的所有節點,直至搜索至出庫,得到最佳路徑。其缺陷是計算速度慢,工作效率低。在實際應用時,一般都會加上各自的預處理方法:分層或預計算。由于各停車場內環境不相同,相對復雜,本算法將對傳統的Dijkstra算法進行改進。利用有向帶權圖,將路徑賦予一定權值,權值滿足條件的道路才予以考慮。
為了簡化,將車位和停車場內的路徑均看成節點,并進行編號,在搜索路徑時將車位節點和路徑節點分開處理。首先處理路徑節點:根據上文得到的目標車位位置,得到其所在目標路段編號。建立兩個路段節點集合M、N,集合M中包含入口路段節點及其最小權值,集合N中包括其他路段節點及其對應權值。從N中找出權值最小的節點,將其移至集合M中,并更新集合N中的權值。重復這一操作直到目標道路節點出現在集合M中,這時只需將入口道路節點與集合M中出現的節點連接起來,即可構建最優行車路線。具體流程如圖5所示。
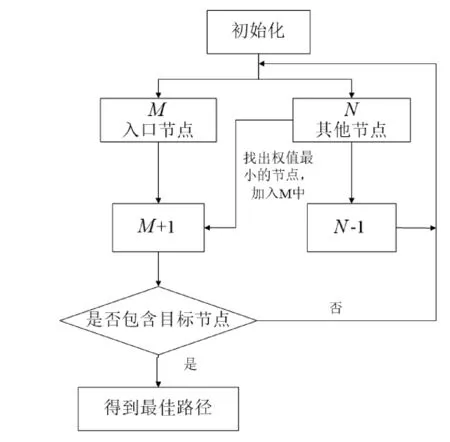
圖5 路徑識別流程
2.3 測試效果
硬件測試時,編寫簡短的測試程序燒錄至ARM主控平臺,主要檢測磁阻傳感器能否實時更新車位的占用情況,數據能否通過ZigBee無線網絡傳輸至主控平臺。并測試各種干擾情況是否會影響數據的準確度、完整度。經測試,數據采集終端運行正常,無線網絡傳輸正常,符合預期目標。
軟件測試以圖3為停車場平面模型和實時車況參考,檢測軟件是否能正確找到有效路徑。首先需要根據備選車位、距離入口距離、道路情況等確定最優停車位。根據空位識別得知,當前停車場共有6個空位,編號為Si(i=1~6)。車場內每條路徑的長度是不變的,只考慮道路距離權值的話,S3即為最優車位,可系統計算時綜合考慮了距離權值和道路狀況權值,S3車位所在路段R11當前路況較為擁擠,路段權值過大,不予考慮。綜合考慮后,選取了S4節點為最優車位,根據系統的路徑規劃算法規劃出最佳路線為:入口—R2—R4—R13—R14—S4,路徑如圖6所示。可以看出,最終設計的路徑有效地避開了R3、R5、R11、R12等擁擠路段。
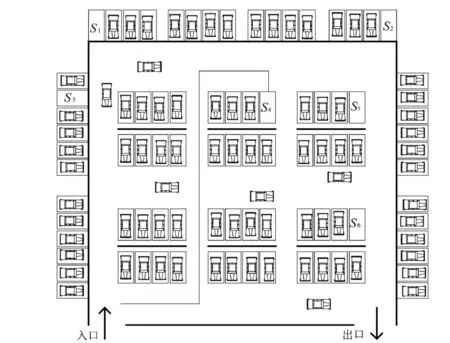
圖6 路徑識別結果
3 信息的處理和發布
在信息采集和處理端,主要采用了C語言來開發設計軟件程序,大大降低了開發難度。并結合MySQL(關系型數據庫管理系統)數據庫,存儲車位和車輛信息,可以滿足服務器的使用需求。
在信息傳送和發布端,軟件方面需要實現的功能是:當有車輛入場時,首先確定所有空位位置信息,再利用路徑規劃算法,定位最優車位,并提供最優停車路線;通過網絡設備將以上信息推送至服務器,通過服務器的可視化界面,將信息發布在用戶終端(目前主要是在web端)上,引導用戶駕車至最優停車位。
信息發布端采用B/S(瀏覽器/服務器)架構,實現了客戶端的統一,將功能實現部分集中在云端(服務器),終端只需安裝瀏覽器即可實現與服務器數據庫的信息共享,簡化了客戶端的功能。具體實現過程是:用戶通過瀏覽器向服務器發送請求,服務器端接收、處理請求并產生響應,把用戶請求的數據(這里主要是車位信息和路線圖)返回到瀏覽器;瀏覽器解釋執行HTML(超文本標記語言)文件,呈現在用戶界面上。另外,系統利用了RSTP(快速生成樹)協議實現信息的發布。RSTP是一種主機和服務器之間的雙向通信協議,可以實現聲音和影像等多媒體信息的傳送,在本系統中傳遞的主要是車位和路線信息。
4 結束語
在停車場智能引導系統的研究開發過程中,主要實現了停車場空位實時識別并生成相應平面圖、識別出最佳空位和最優引導路徑。該系統在投入應用后,可以提高大型停車場的車位利用率及運行效率,為用戶節省時間,進而提高停車場的管理水平和服務質量。另外,本系統具有可視化界面,針對某一停車場環境進行建模,實時顯示停車位的空閑或占用狀態。當汽車駕駛人駛入停車場區域內時,即可通過終端平臺(手機APP)查看空閑車位位置,并迅速停車。若駕駛人不熟悉環境,可選擇停車空位項進行停車誘導;系統將采用圖形界面提示或者語音提示的方法進行停車誘導,幫助駕駛人提高停車效率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
創業家(2015年5期)2015-02-27 07:53:25
中外會展(2014年4期)2014-11-27 07:46:46