外肢體機(jī)器人的運(yùn)動(dòng)分析與控制仿真
2021-05-06 07:47:26史亦凡管小榮李回濱
兵器裝備工程學(xué)報(bào) 2021年4期
關(guān)鍵詞:模型
史亦凡,管小榮,李回濱,李 仲
(南京理工大學(xué) 機(jī)械工程學(xué)院, 南京 210094)
隨著近些年來(lái)各行各業(yè)對(duì)機(jī)器人技術(shù)日益增長(zhǎng)的需求,以及機(jī)器人產(chǎn)業(yè)的飛速發(fā)展,催生了研發(fā)更智能機(jī)器人來(lái)滿足日常生活、生產(chǎn)中的各種需求。與傳統(tǒng)工業(yè)機(jī)器人相比,外肢體機(jī)器人可操作性性更強(qiáng),它可以直接聽(tīng)從人下達(dá)的指令,彌補(bǔ)了人體手臂存在的不足。美國(guó)麻省理工大學(xué)的Federico Parietti等人開(kāi)發(fā)出了一種多余機(jī)械外肢(Supernumerary Robotic limb,SRL),其主要功能包括復(fù)雜作業(yè)環(huán)境下的人體支撐、改善人體步態(tài)平衡、協(xié)助作業(yè)等,應(yīng)用場(chǎng)景包括飛機(jī)制造、建筑工地、老年人生活輔助以及步態(tài)平衡等[1-3]。日本慶應(yīng)大學(xué)的Yamen Saraiji等人設(shè)計(jì)了一種名為MetaLimbs的外肢體機(jī)器人,使用了足部的彎曲傳感器檢測(cè)腳趾的彎曲用于控制靈巧手,并應(yīng)用運(yùn)動(dòng)跟蹤系統(tǒng)檢測(cè)穿戴者足部位置用于控制手臂末端位置[4-5]。美國(guó)佐治亞理工學(xué)院Roozbeh Khodambashi等人研制了一種四自由度的單臂外肢體機(jī)器人并將研究成果應(yīng)用到打擊樂(lè)器的演奏[6]。
由于大多數(shù)機(jī)器人系統(tǒng)相對(duì)復(fù)雜,其運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)建模具有一定的難度,在對(duì)多自由度機(jī)器人建立運(yùn)動(dòng)模型的過(guò)程中,例如關(guān)節(jié)摩擦等很多非人為因素都會(huì)造成計(jì)算結(jié)果的誤差。在機(jī)器人的控制方法研究中,建立準(zhǔn)確的數(shù)學(xué)模型具有至關(guān)重要的作用,所以研究一種高效的機(jī)器人建模方法具有十分重要的意義。現(xiàn)有大多數(shù)研究機(jī)器人數(shù)學(xué)模型的方法是基于D-H法。通過(guò)建立各個(gè)關(guān)節(jié)的局部坐標(biāo)系來(lái)推導(dǎo)出末端相對(duì)于基礎(chǔ)坐標(biāo)系的位置.但對(duì)于每個(gè)局部坐標(biāo)系的建立,操作復(fù)雜,運(yùn)算繁瑣,且沒(méi)有明顯的幾何意義。相對(duì)于D-H法,運(yùn)用旋量理論建立機(jī)器人數(shù)學(xué)模型只需要建立物體坐標(biāo)系和工具坐標(biāo)系,更適合于描述機(jī)器人整體的運(yùn)動(dòng)過(guò)程,更加方便實(shí)用[7]。
本文運(yùn)用旋量理論建模方法,建立了外肢體機(jī)器人的運(yùn)動(dòng)學(xué)以及動(dòng)力學(xué)模型。并通過(guò)動(dòng)力學(xué)模型設(shè)計(jì)了外肢體機(jī)器人模糊補(bǔ)償控制器,對(duì)外肢體機(jī)器人期望軌跡進(jìn)行跟蹤。這些研究?jī)?nèi)容對(duì)深刻認(rèn)識(shí)外肢體機(jī)器人具有十分重要的意義,也對(duì)研究其他串聯(lián)機(jī)器人的運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)問(wèn)題具有一定的參考價(jià)值。
1 外肢體機(jī)器人設(shè)計(jì)
外肢體機(jī)器人三維模型如圖1,結(jié)構(gòu)如圖2所示,采用三連桿結(jié)構(gòu),由前臂、后臂、基座以及3個(gè)驅(qū)動(dòng)電機(jī)組成。外肢體機(jī)器人通過(guò)立柱電機(jī)和兩個(gè)關(guān)節(jié)電機(jī)帶動(dòng)末端夾持器按照規(guī)劃的運(yùn)動(dòng)軌跡來(lái)運(yùn)動(dòng),從而幫助用戶來(lái)完成一系列單人難以完成的復(fù)雜任務(wù)。外肢體機(jī)器人整體有3個(gè)自由度,底座高0.2 m,前臂和后臂的最小長(zhǎng)度為0.3 m,為了提高外肢體機(jī)器人對(duì)不同任務(wù)的通用性,前后臂長(zhǎng)度均為可調(diào)節(jié),以適用于不同的任務(wù)場(chǎng)景和用戶。
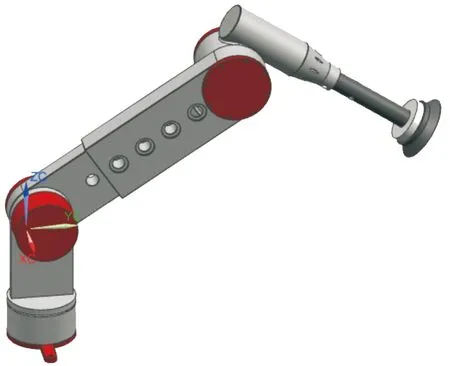
圖1 外肢體機(jī)器人三維模型示意圖
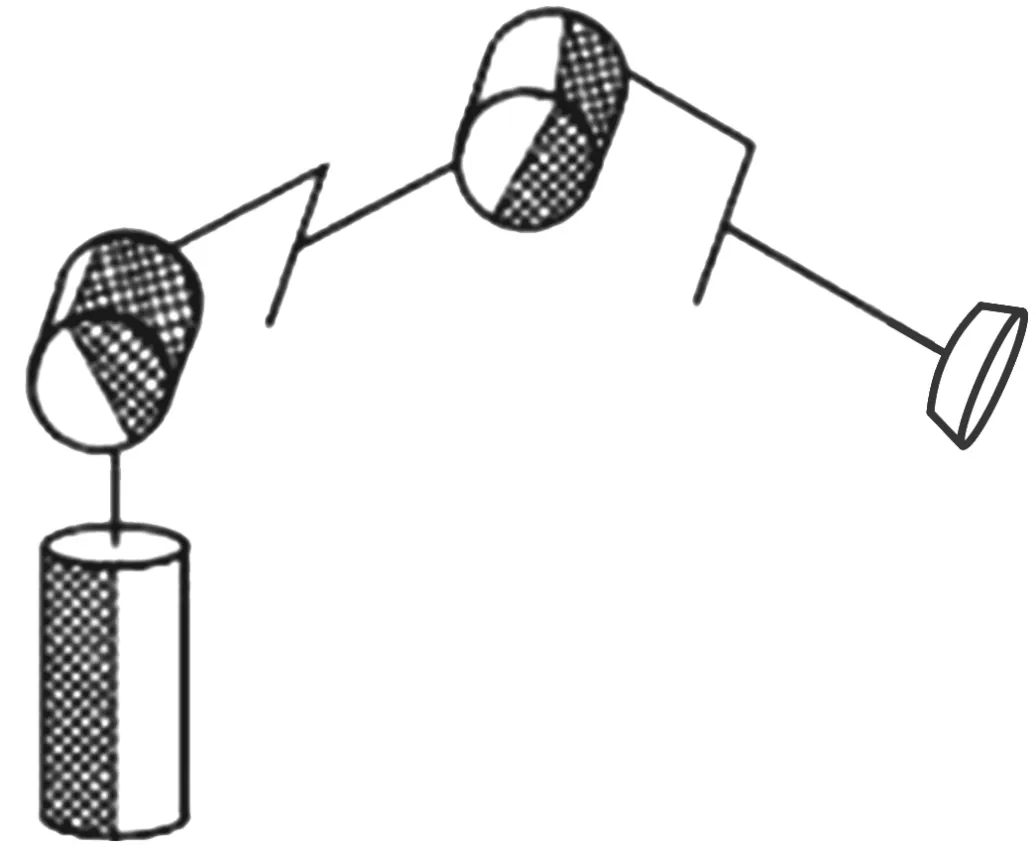
圖2 外肢體機(jī)器人結(jié)構(gòu)示意圖
2 外肢體機(jī)器人運(yùn)動(dòng)學(xué)分析
2.1 機(jī)器人運(yùn)動(dòng)學(xué)建模
簡(jiǎn)化外肢體機(jī)器人機(jī)構(gòu),以基座為原點(diǎn)建立基礎(chǔ)坐標(biāo)系S,以外肢體末端建立工具坐標(biāo)系T,如圖3所示[8-9]。
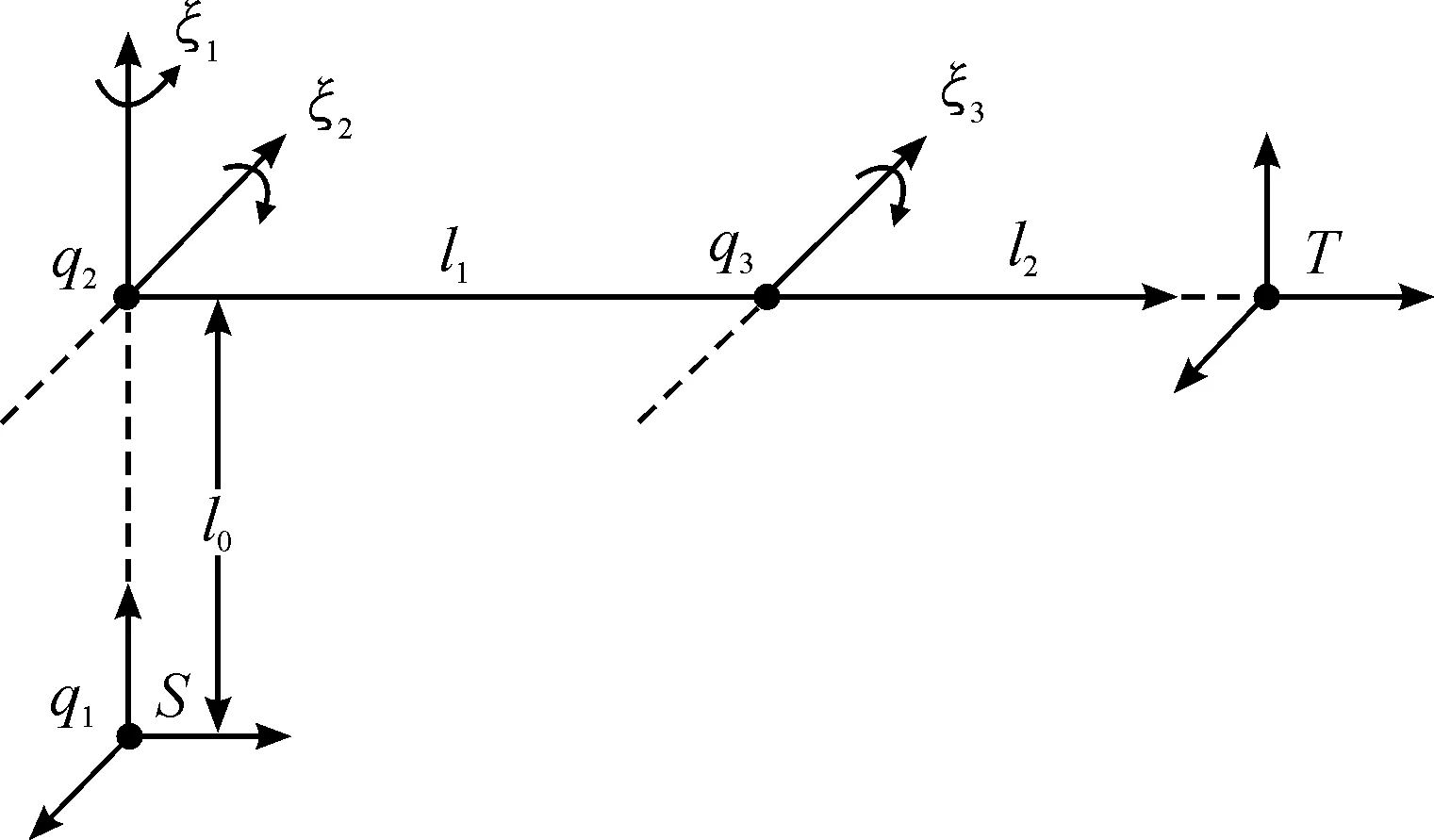
圖3 外肢體機(jī)器人機(jī)構(gòu)運(yùn)動(dòng)坐標(biāo)系
θ=0時(shí)基礎(chǔ)坐標(biāo)系與工具坐標(biāo)系的變換為:
(1)
轉(zhuǎn)動(dòng)關(guān)節(jié)運(yùn)動(dòng)旋量為:
(2)
取軸線上的點(diǎn):
(3)
運(yùn)動(dòng)旋量為:
(4)
根據(jù)指數(shù)積公式可求得機(jī)械臂的運(yùn)動(dòng)學(xué)模型:(記ci=cosθisi=sinθi)
(5)
(6)
(7)
(12)
用指數(shù)積公式展開(kāi)各式得:
(8)
機(jī)械外肢體的姿態(tài)矩陣:
(9)
r11=c1,r12=s1(s2s3-c2c3)
r13=-s1(c2s3+s2c3),r21=s1
r22=c1(c2c3-s2s3),r23=c1(c2s3+s2c3)
r31=0,r32=-c2s3-s2c3,r33=c2c3-s2s3
機(jī)械外肢體末端的位置向量:
(10)
其中記:
p11=c2s1(l0s3+l1(c3-1))-l0(c2s1s3+
c3s1s2)-(l1+l2)(c2c3s1-s1s2s3)-
s1s2(l1s3-l0(c3-1))+l0s1s2
p21=(l1+l2)(c1c2c3-c1s2s3)+l0(c1c2s3+
c1c3s2)-c1c2(l0s3+l1(c3-1))+
c1s2(l1s3-l0(c3-1))-l0c1s2
p31=l0(c2c3-s2s3)-l0(c2-1)-(l1+l2)·
(c2s3+c3s2)+c2(l1s3-l0(c3-1))+
s2(l0s3+l1(c3-1))
2.2 機(jī)器人運(yùn)動(dòng)學(xué)仿真
利用MATLAB機(jī)器人工具箱創(chuàng)建外肢體機(jī)器人模型,我們可以通過(guò)仿真外肢體機(jī)器人裝配壁掛板時(shí)的場(chǎng)景(如圖4)來(lái)定義外肢體機(jī)器人初始狀態(tài)關(guān)節(jié)變量和目標(biāo)狀態(tài)關(guān)節(jié)變量。仿真完成得到外肢體機(jī)器人末端相對(duì)于基座的位姿,即此時(shí)外肢體機(jī)器人的運(yùn)動(dòng)學(xué)正解,外肢體機(jī)器人運(yùn)動(dòng)學(xué)模型如圖5所示,其中各個(gè)關(guān)節(jié)的位置曲線、速度曲線和加速度曲線如圖6所示。

圖4 外肢體機(jī)器人使用場(chǎng)景示意圖
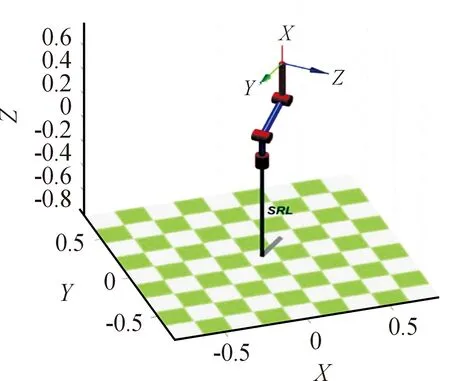
圖5 外肢體機(jī)器人運(yùn)動(dòng)學(xué)模型示意圖
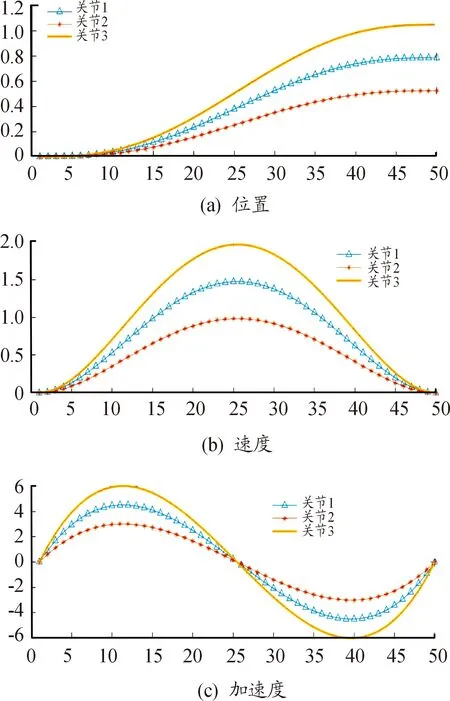
圖6 各關(guān)節(jié)位置曲線、速度曲線和加速度曲線
將目標(biāo)狀態(tài)關(guān)節(jié)變量代入機(jī)器人運(yùn)動(dòng)學(xué)正解式中,得到表1所示機(jī)器人末端位移的運(yùn)動(dòng)學(xué)方程計(jì)算結(jié)果與基于 D-H 理論的MATLAB建模仿真結(jié)果。其中p11、p21、p31為理論值,即為運(yùn)用旋量理論建立的外肢體數(shù)學(xué)模型計(jì)算出的結(jié)果;x、y、z為仿真值,即為運(yùn)用MATLAB機(jī)器人工具箱建立的外肢體機(jī)器人模型仿真結(jié)果。
由以上數(shù)據(jù)可以看出,運(yùn)動(dòng)學(xué)方程計(jì)算結(jié)果與MATLAB建模仿真結(jié)果之間誤差不超過(guò)1%,驗(yàn)證了外肢體機(jī)器人運(yùn)動(dòng)學(xué)方程的準(zhǔn)確性和可行性,同時(shí)也證明了基于旋量理論的運(yùn)動(dòng)學(xué)建模方法在比采用傳統(tǒng)的D-H法更加簡(jiǎn)化的同時(shí)還能保證其準(zhǔn)確性。通過(guò)圖6可以看出,外肢體機(jī)器人的速度曲線以及加速度曲線均較為平滑,且各關(guān)節(jié)及末端能夠平穩(wěn)地由初始狀態(tài)運(yùn)動(dòng)到最終狀態(tài),說(shuō)明外肢體機(jī)器人能夠較為平穩(wěn)的完成假設(shè)任務(wù)。運(yùn)動(dòng)學(xué)模型的正確建立也為動(dòng)力學(xué)模型的構(gòu)建和運(yùn)動(dòng)控制提供了參考依據(jù)[10]。
3 外肢體機(jī)器人動(dòng)力學(xué)分析
3.1 機(jī)器人動(dòng)力學(xué)建模
運(yùn)動(dòng)學(xué)分析已經(jīng)求得了外肢體各個(gè)關(guān)節(jié)的運(yùn)動(dòng)旋量:
(11)
如圖7所示,在各個(gè)連桿的質(zhì)心處建立一個(gè)坐標(biāo)系,坐標(biāo)軸的方向與連桿慣性的主軸方向相同:
(12)
(13)
(14)
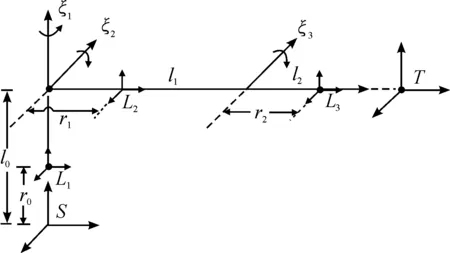
圖7 機(jī)器人機(jī)構(gòu)動(dòng)力學(xué)坐標(biāo)系
為計(jì)算外肢體的慣性矩陣,需要先計(jì)算各連桿的雅可比矩陣。經(jīng)具體計(jì)算后得:(記:ci=cosθi,cij=cos(θi+θj),si=sinθi,sij=sin(θi+θj))
(15)
(16)
(17)
系統(tǒng)的慣性矩陣為:
(18)
其中:

M12=0,M13=0,M21=0

M31=0
根據(jù)慣性矩陣計(jì)算得出哥式力和離心力:
(19)
經(jīng)計(jì)算可得非零的Γijk值為:
Γ113=(Iy3-Iz3)c23s23

c23s23-m3(l1c2+r2c23)(l1s2+r2c23)
Γ131=(Iy3-Iz3)c23s23-m3r2s23(l1c2+r2c23)
c23s23-m3(l1c2+r2c23)(l1s2+r2c23)
Γ223=-l1m3r2s3
重力矩陣為:
(20)
至此,完成外肢體動(dòng)力學(xué)建模。
3.2 機(jī)器人動(dòng)力學(xué)仿真
根據(jù)外肢體機(jī)器人幫助工人裝配壁掛板時(shí)的場(chǎng)景,可以通過(guò)MATLAB編程計(jì)算出動(dòng)力學(xué)模型每個(gè)關(guān)節(jié)的理論力矩。各個(gè)關(guān)節(jié)的理論驅(qū)動(dòng)力矩計(jì)算值如圖8所示。

圖8 各關(guān)節(jié)理論驅(qū)動(dòng)力矩計(jì)算值曲線
在ADAMS中對(duì)機(jī)器人模型添加質(zhì)量、轉(zhuǎn)動(dòng)慣量和材料屬性等信息,在基座和地面之間添加固定約束,對(duì)每個(gè)旋轉(zhuǎn)關(guān)節(jié)添加旋轉(zhuǎn)副。將前面各關(guān)節(jié)角度變化值導(dǎo)入ADAMS中作為驅(qū)動(dòng)函數(shù),每個(gè)關(guān)節(jié)添加兩個(gè)傳感器以約束關(guān)節(jié)旋轉(zhuǎn)的范圍。ADAMS虛擬樣機(jī)模型如圖9所示,仿真得到各關(guān)節(jié)驅(qū)動(dòng)力矩曲線如圖10所示。由于虛擬樣機(jī)模型與理論動(dòng)力學(xué)模型有一定差距,但通過(guò)外肢體機(jī)器人動(dòng)力學(xué)模型計(jì)算結(jié)果和ADAMS仿真結(jié)果對(duì)比可以看出兩種結(jié)果具有相似性,證明了所建立的動(dòng)力學(xué)模型的準(zhǔn)確性。進(jìn)一步,從各個(gè)關(guān)節(jié)驅(qū)動(dòng)力矩曲線也可以看出在整個(gè)運(yùn)動(dòng)過(guò)程中,驅(qū)動(dòng)各關(guān)節(jié)的力矩都在較小的范圍內(nèi)變化,因此認(rèn)為在這個(gè)過(guò)程中沒(méi)有出現(xiàn)沖擊載荷的現(xiàn)象,證明了使用外肢體機(jī)器人完成具體任務(wù)的可行性[11]。

圖9 外肢體機(jī)器人Adams虛擬樣機(jī)模型
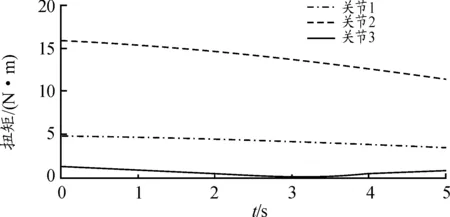
圖10 各關(guān)節(jié)仿真驅(qū)動(dòng)力矩曲線
3.3 基于動(dòng)力學(xué)模型的模糊補(bǔ)償控制
通過(guò)已知的動(dòng)力學(xué)模型設(shè)計(jì)一種模糊自適應(yīng)控制器,并通過(guò)對(duì)外肢體期望軌跡的跟蹤來(lái)驗(yàn)證模糊自適應(yīng)控制器的可行性。由于在外肢體機(jī)器人系統(tǒng)中,每個(gè)旋轉(zhuǎn)關(guān)節(jié)或多或少都具有摩擦特性,在外肢體動(dòng)力學(xué)模型的基礎(chǔ)上,根據(jù)基于傳統(tǒng)模糊補(bǔ)償?shù)目刂品椒▉?lái)設(shè)計(jì)控制律[12]。
模糊自適應(yīng)控制律設(shè)計(jì)為:
(21)
模糊系統(tǒng)設(shè)計(jì)為:
(22)
取控制器設(shè)計(jì)參數(shù)為:λ1=λ2=λ3=10,KD=20I,Γ1=Γ2=0.000 1取系統(tǒng)初始狀態(tài)為:
q1(0)=q2(0)=q3(0)=0
(23)
(24)
取摩擦項(xiàng)為:
(25)
在魯棒控制律中取W=diag[2,2,2],模糊系統(tǒng)權(quán)值中每個(gè)元素初值取0.1。
控制目標(biāo)是三關(guān)節(jié)的輸出q1、q2和q3能夠分別跟蹤期望軌跡qd1=0.3sint、qd2=0.3sint和qd3=0.3sint。仿真結(jié)果如圖11、圖12和圖13。
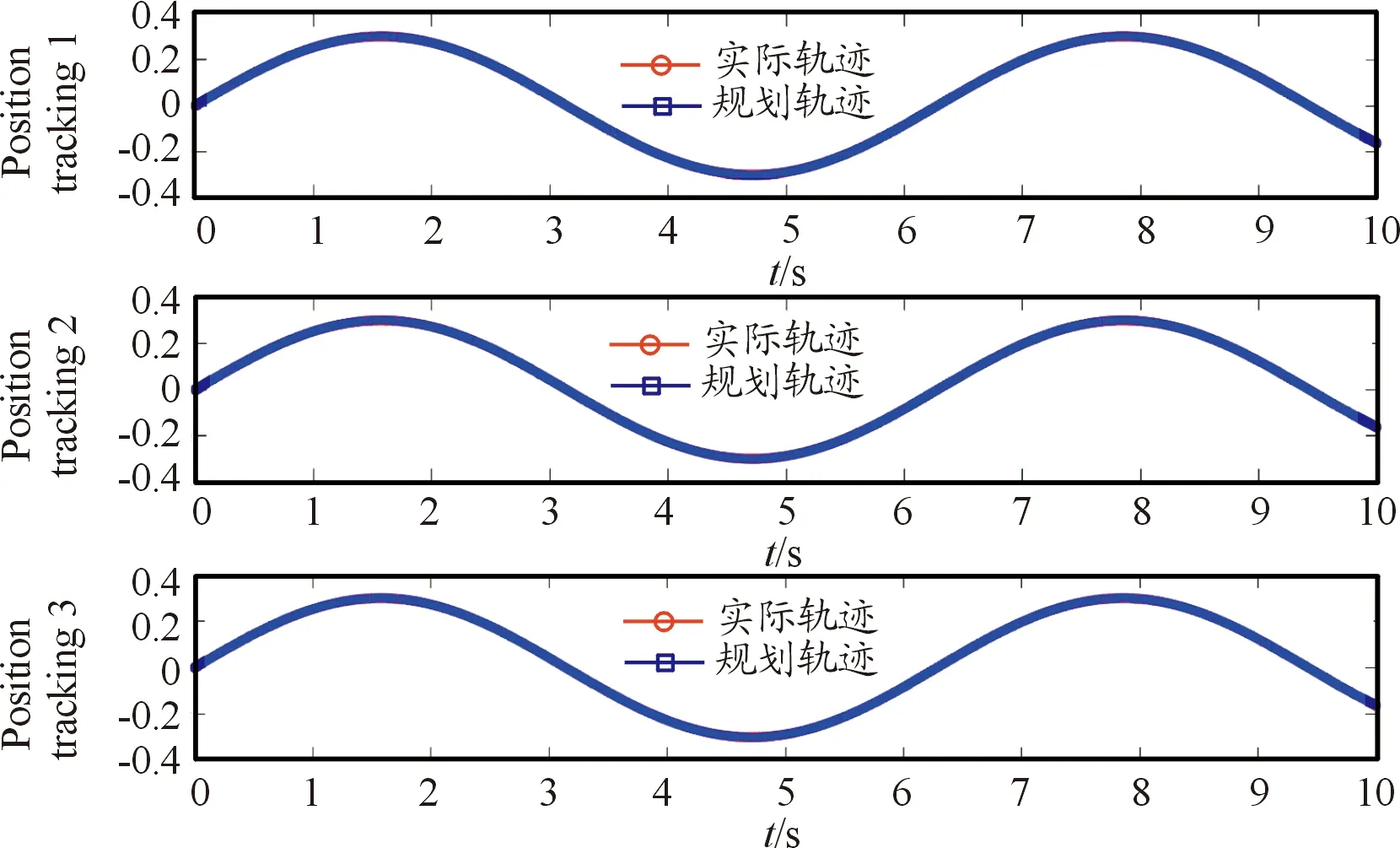
圖11 各關(guān)節(jié)角度跟蹤曲線
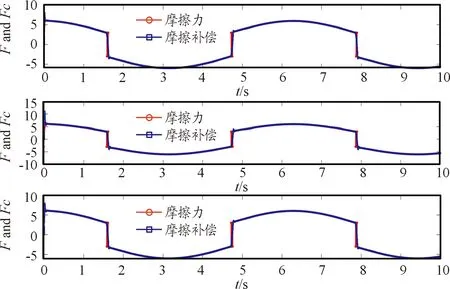
圖12 各關(guān)節(jié)摩擦及其補(bǔ)償曲線
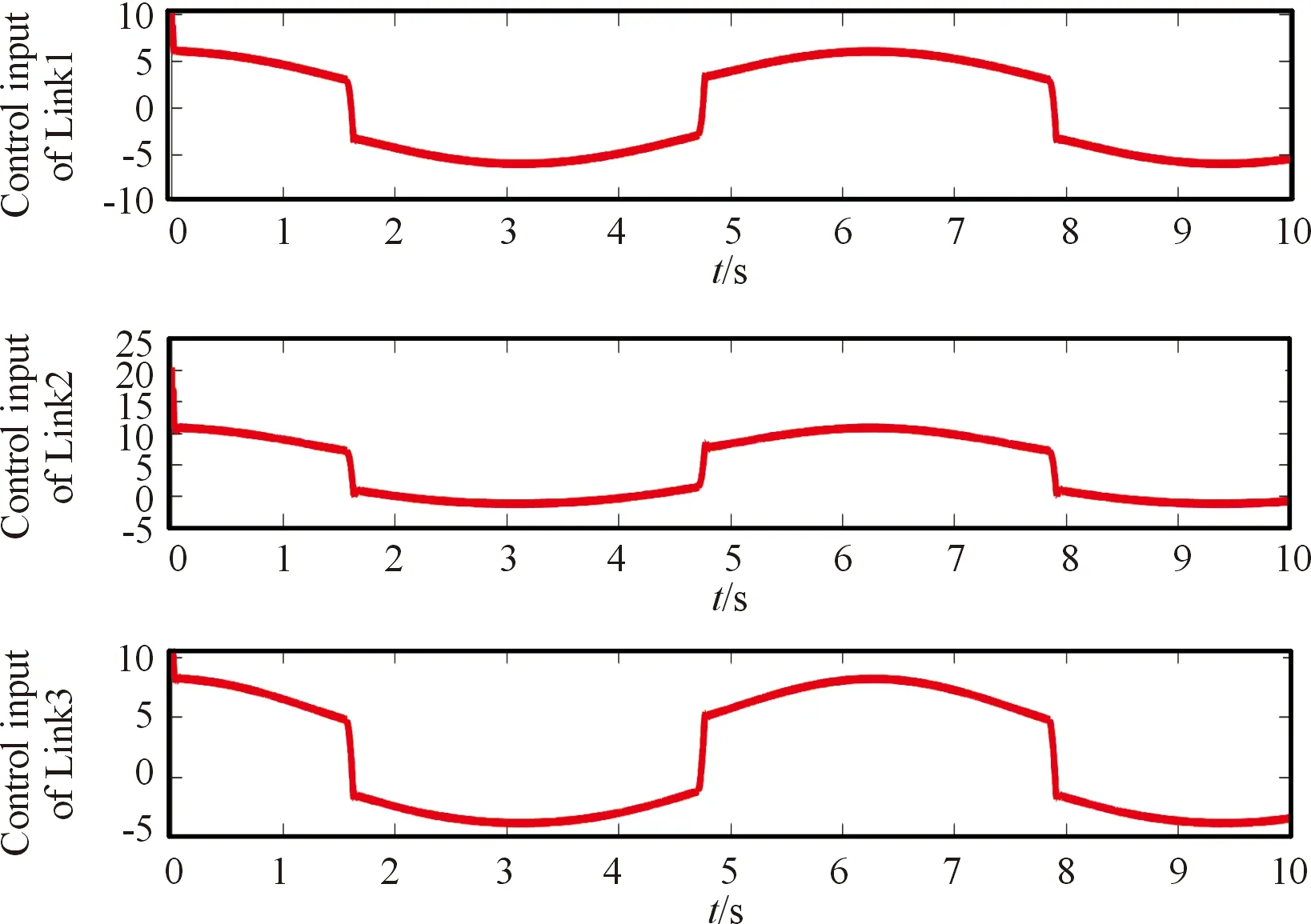
圖13 各關(guān)節(jié)控制輸入曲線
由圖11、圖12和圖13所示仿真曲線可以看出,在外肢體機(jī)器人控制系統(tǒng)中,采用考慮了摩擦補(bǔ)償?shù)淖赃m應(yīng)模糊控制,外肢體機(jī)器人各關(guān)節(jié)的位置和速度都能夠很好的跟蹤預(yù)期軌跡。同時(shí)表明,模糊補(bǔ)償?shù)目刂品椒ň哂恤敯粜院茫雀叩忍攸c(diǎn),具有較好的控制效果,從而實(shí)現(xiàn)對(duì)外肢體機(jī)器人預(yù)期軌跡的高精度跟蹤,為外肢體機(jī)器人電機(jī)選型和控制器參數(shù)選擇提供了一定的理論依據(jù)。
4 結(jié)論
1) 基于旋量理論構(gòu)建了外肢體機(jī)器人運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型,驗(yàn)證了模型的準(zhǔn)確性;為外肢體機(jī)器人設(shè)定具體工作任務(wù),并根據(jù)任務(wù)對(duì)外肢體機(jī)器人各關(guān)節(jié)位置、速度和加速度進(jìn)行了分析,不會(huì)出現(xiàn)沖擊載荷,證明了使用外肢體機(jī)器人完成具體任務(wù)的可行性;
2) 基于摩擦的模糊補(bǔ)償控制器的研究和仿真,實(shí)現(xiàn)了對(duì)外肢體機(jī)器人預(yù)期軌跡的高精度跟蹤,為以后電機(jī)選型和控制器參數(shù)選擇提供了理論依據(jù)。
3) 外肢體機(jī)器人系統(tǒng)的運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)特性分析對(duì)于外肢體機(jī)器人動(dòng)態(tài)性能和靜態(tài)特性的研究及其控制具有重要意義,也為提升外肢體機(jī)器人的工作精度、穩(wěn)定性、空間分辨率等方面奠定了基礎(chǔ)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
