基于SVM的激光雷達飛機尾渦識別方法
2021-05-06 07:47:04潘衛軍吳鄭源
兵器裝備工程學報 2021年4期
王 玄,潘衛軍,韓 帥,吳鄭源
(中國民用航空飛行學院空中交通管理學院, 四川 廣漢 618307)
飛機尾流是飛機升力的產物,它在機翼后方呈現漩渦的形式[1],尾流也被稱為飛機尾渦,能夠在空中較為穩定的存在一段時間[2]。當后機遭遇尾流時,由于飛機周圍空氣狀態發生變化,氣動性能會受到影響,嚴重時可能會發生滾轉、掉高度、失速等情況[3-4]。
對飛機尾流的研究是保障飛行安全的前提,研究飛機尾流的常用方法包括基于計算流體力學 (CFD)的數值模擬、風洞試驗和實地探測等方法[5]。Hallock等[6]在英國希思羅機場進行飛機尾流探測實驗時,發現大型飛機尾渦消散和小型飛機與在低雷諾數風洞試驗中的結果存在差異。Harris等[7]對比風洞試驗飛機尾渦數據與雷達實地探測數據,提出了一種用于比較不同數據源的飛機尾渦方法。國內專家學者對尾流也進行了一定研究,牛鳳梁等使用W波段雷達對飛機尾渦進行探測和識別,通過建立雨滴受力微分方程,對飛機尾渦的雷達回波的多種特性進行了研究[8-11]。劉俊凱等研究了潮濕大氣下的飛機尾渦特性和飛機尾渦提取方法,給出了基于矩陣恒虛警率的飛機尾渦追蹤檢測方法[12-18]。但是,這些研究沒有考慮尾渦探測中實際存在的非均勻風場等因素,導致傳統識別模型和實際探測到的飛機尾流數據不能很好的匹配。
本文使用多普勒激光雷達在國內多個機場進行實地探測,前期研究中提出了基于波形相似匹配的尾渦識別方法[19]、基于Alex和基于K最近鄰的尾渦識別方法[20-21],波形相似匹配方法和Alex卷積神經網絡法對于靜風情況下的尾渦有較好的識別效果,但在一定風的影響下,識別效果有限。KNN(K nearest neighbor)方法能夠較好識別一定風速下的尾渦,但識別精度有待提升,鑒于此種情況,本文結合激光雷達實地探測的航班尾流數據,提出了一種基于支持向量機(SVM)的飛機尾渦識別方法,對提取特征后的尾渦數據進行識別,并與KNN方法進行對比,確保其有效性和精準性。
1 飛機尾渦探測模型
飛機尾渦是旋轉運動,其運動速度方向垂直于飛機尾渦渦心連線,即切向方向,因此也稱之為切向速度,用vr表示。切向速度vr的大小和飛機尾渦的強弱密切相關,衡量尾渦強弱的物理量是渦環量,用Γ表示,初始渦環量Γ0和切向速度vt(r)分別表示為:
(1)
(2)
式中:m和B分別表示飛機的質量和翼展;s為常量,其值為π/4;v表示飛機的空速;ρ表示空氣密度;g表示重力加速度;r表示尾渦橫截面上的點到渦核的距離;rc為渦核半徑,通常取值rc=0.052Bs。
激光雷達常用的掃描模式有距離高度指示器(RHI) 和平面位置指示器 (PPI)兩種,綜合分析兩種掃描模式,本文采用RHI模式進行掃描,在實地探測過程中,多普勒激光雷達安放位置如圖1所示。

圖1 普勒激光雷達安放位置示意圖
受限于脈沖多普勒激光雷達探測原理,最后處理出來的數據是離散數據,每個掃描周期得到的徑向風場為不同距離門、不同仰角的徑向風速集合,用Vr表示,具體為:
Vr={vr(ρi,θj)},i∈[1,n],j∈[1,m]
(3)
式中:ρi表示探測點距離雷達距離;θj表示探測點連線和水平面的夾角,n和m分別代表距離門的數量和不同俯角角度。
2 飛機尾渦特征的提取和處理
2.1 最大速度極差
在對激光雷達探測的徑向速度場識別之前,需要對能夠表征飛機尾渦的特征進行提取和處理。特征提取是非常最重要的一環,特征提取的效果,直接影響到最后識別的結果,本文考慮最大速度極差和環境因素作為重要特征。
對于激光雷達探測的徑向速度場數據,傳統的提取徑向速度風場的方式為速度極差法,為了體現飛機尾渦存在的正負速度的差異,分別按照不同徑向計算速度極差,或按照不同的角度計算速度極差,用Dr(ri)和Da(θj)表示,其計算公式為[22]:
Dr(ri)=max(vr(ri,θj))-min(vr(ri,θj))
?j∈[1,m]
Da(θj)=max(vr(ri,θj))-min(vr(ri,θj))
?i∈[1,n]
(4)
式中,n和m分別表示激光雷達距離門的數量和不同掃描仰角的數量。
由于空中的風存在不均勻現象,風場本身不均勻的變化也可能表征在該區域范圍內,因此按照式(4)計算出的最大速度極差所表征的區域可能并不代表飛機的尾渦區域。
在實際探測中,對于雷達掃描到的飛機尾渦區域,無論是采用不同徑向速度極差或者不同仰角的速度極差,考慮的都只是航空器產生的單個尾渦,考慮到航空器在實際飛行中左右機翼同時生成尾渦,假定左右尾渦之間的間隔為b0(b0=Bs),則航空器左右尾渦產生的矩形區域速度極差,如圖2所示。

圖2 矩形區域速度極差示意圖
在圖2中,矩形區域的大小設定為固定值,該矩形區域包括4個大小相同的子矩形,分別表示為左上(UL),左下(LL),右上(UR),右下(LR),定義最大矩形極差Drec(ri,θj)為:
(5)

2.2 其他環境因因素
在激光雷達實地探測過程中,大氣環境參數對飛機尾渦的探測有較大影響,本文在民航局氣象部門的支持下,獲得了探測時段的機場氣象數據,經篩選后,選擇氣溫T,氣壓P,背景風速vwv,背景風向θwd,分別作為表征氣象和順風、逆風、側風等因素對飛機尾渦影響的特征[22]。
根據上述對尾渦特征的提取,合并環境參數,可得特征向量xi和對應標記yi為:
xi=(Dr,Da,Drec,T,vwv,θwd,P),yi∈{-1,+1}
(6)
式中:i∈[1,N],N表示樣本數量;yi=-1表示飛機尾渦不存在,yi=+1表示飛機尾渦存在。特征向量xi中每一個特征向量對應第2節的定義。
提取1 038組激光雷達探測的徑向風場數據和對應的環境參數數據,其中523組數據包含飛機尾渦,515組徑向風場數據不包含飛機尾渦,從徑向風場數據中提取對應的DrDa,和Drec3個特征,提取對應時間的環境數據,溫度T,壓力P,風速vwv,風向θwd,最后得到的數據集D為[22]:
D={(xi,yi)},i∈[1,N]
(7)
式中,N=1 038表示數據集中特征向量的數量。
合計7類特征,數據集中每個特征的具體范圍如表1中所示,表1中依次是所有樣本特征的統計值,分別列出了最大值、最小值、均值和標準差,可以看出,不同距離的速度極差和不同角度的速度極差,以及溫度標準差較大,說明不同樣本之間的差距較大,其余特征不同樣本之間的差距較小[22]。

表1 特征值范圍
3 基于SVM的尾渦識別方法
3.1 SVM識別模型
本文采用機器學習的方法對飛機尾渦進行識別,它通過尋找超平面對給定的向量進行分類。圖3為SVM分類示意圖,當特征數為2的時候,根據數據集中樣本的二維特征值,將其作為X坐標和Y坐標,繪制在二維平面中,其中實心圓形和空心圓形分別代表不同分類的樣本點,對于飛機尾渦識別,即是否存在飛機尾渦,SVM方法在于從其中找出一個直線,能夠將兩類樣本點分離開,對于需要識別的徑向風場數據,根據對應的二維特征,判斷是落在直線的哪邊,從而確定分類結果[22]。

圖3 SVM分類示意圖
對于具備p個特征的數據,其特征向量為p維向量,SVM計算的是能夠將兩類樣本數據完全分離開來的p-1維超平面,結合式(6)中特征向量的表達式,可得:
w·x+b=0
(8)
對于超平面w·x+b=0,樣本點xi到超平面的幾何間隔yi表示為:
(9)
對于SVM所求解的超平面是使得間隔值最大的超平面,因此式(9)的問題轉化為:
(10)
其中,滿足該約束條件成立的特征向量,也被稱為支持向量(support vector)。
本文對尾渦的識別可看做是典型的SVM分類問題,因此SVM模型可改進為:
(11)
式中:ξi為松弛變量,每個特征向量都對應了一個松弛變量,代表該組樣本不滿足約束的程度;C表示懲罰因子,表示部分樣本能夠允許不完全被超平面完整劃分的約束強弱。
SVM通過映射函數φ將特征向量xi映射到高維空間,再尋找最佳超平面。本文定義內核函數為K,若K和φ滿足以下關系:
K(xi,xj)=φ(xi)·φ(xj)
(12)
則求解函數的內積能夠直接替換成對應的核函數,本文選擇引用RBF核函數中的經典高斯核函數,高斯核函數K和其映射函數φ為:
K(xi,xj)=e-γxi-xj||
(13)
φ(xi)=(e-γxi-x1||,e-γxi-x2||,…,e-γxi-xm||)
(14)
式中,γ是RBF核函數的參數,等于1/2σ2。
因此通過高斯核函數后能夠將線性不可分的特征向量轉換稱為線性可分的特征向量,最終SVM的求解模型為:
(15)
該問題為不等式約束的凸二次規劃問題,直接求解較為困難。因此對其使用拉格朗日乘子法,轉化為對應的對偶問題,式(15)對應的對偶問題為:
(16)
該損失函數和約束條件的形式,能夠通過啟發式策略的序列最小優化算法解決。
3.2 識別模型參數調節
對RBF核函數,需要設置參數γ,以及懲罰系數C,不同參數最后結果差距較大,本文采用網格搜索的方法,將參數可能的取值按照等比數列的方式進行設置,根據網格搜索的結果,確定一個對于分類器效果更好的參數子空間,通過參數子空間,繼續網格搜索,通過重復這個過程,將參數的范圍不斷搜索,最后確定最佳參數[22]。
在進行初次網格搜索的過程中,首次搜索范圍較大,參數取值范圍為log2C∈[-5,15],log2γ∈[-15,5],步長為1,此時參數空間為C=2-5,2-4,…,214,215,γ=2-15,2-14,…,24,25,結果如圖4(a)所示,橫縱坐標表示C和γ的取值,圖4中顏色條的色彩越亮,表示搜索性能越好,顏色越差,性能越差,從圖中可以看出當log2C=[1,5],log2γ=[-5,-1]時,圖4中顏色相對其他區域更亮,性能優于其他參數空間,對應的C=8,γ=0.125時,此時分類器交叉驗證的平均得分最高,為0.880。
繼續縮小參數范圍,取log2C∈[1,5],log2γ∈[-5,-1],步長調整為0.25,此時參數空間范圍為C=2-1,2-0.75,…,24.75,25和γ=2-5,2-4.75,…,20.75,21,進行第二次搜索,搜索結果如圖4(b)所示,當參數空間范圍進一步縮小至log2C∈[1.75,3.75],log2γ∈[-3.75,-2.25],此時分類器性能最佳的參數組合還是C=8,γ=0.125。重復該過程,迭代第4次,精度為0.1時,得到了參數為C=7.464,γ=0.125,繼續搜索,顏色不會發生明顯變化,且參數值固定為C=7.464,γ=0.125,因此該參數下分類器平均性能最佳,驗證集平均性能為0.882,對應的支持向量數330,為最終得到模型。

圖4 網格搜索性能圖
4 實例驗證及模型評估
通過網格搜索調整參數后會得到一個新的SVM分類器,本文對模型的泛化特性進行驗證,通過3.2節分析將參數設置為C=7.464,γ=0.125,對785組訓練集樣本訓練后,得到對應的分類器,對測試集中253組樣本進行分類,識別的結果如表2所示。
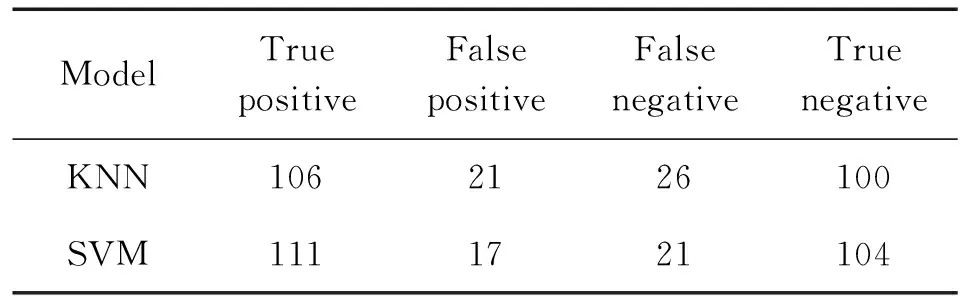
表2 測試集識別結果
表2中最后分類的樣本,是通過混淆矩陣的方式呈現出來,并與基于相同訓練集訓練后的k最近鄰(KNN)的方法對比。從識別的結果來看,SVM無論是對于存在尾渦的風場和不存在尾渦的風場,正確識別的數量都比KNN更多[22]。
根據混淆矩陣中的正負樣本的分類情況,分別定義準確率(ACC)、正預測值 (PPV)、真正率 ( TPR) 、召回率Recall、 F1-Score 作為對識別性能的評估指標。其中PPV表示實際存在的尾渦占識別存在的尾渦的比率,TPR表示所有存在尾渦數據中成功識別的比率,Recall表示相關數據樣本里,成功識別尾渦的比例。考慮實際應用PPV和TPR有時差距過大,需額外納入F1-Score來綜合評估SVM模型的分類性能,根據模型識別結果計算的性能如表3所示。SVM 的方法較KNN的方法無論是準確率、精準率,召回率都更高。

表3 測試集識別結果
由于兩種方法的驗證均是基于測試集樣本的識別情況,識別的數據僅能說明對于該數據集有效,因此引入了受試者工作曲線 (receiver operation characteristic curve,ROC)來評價模型的泛化性能。機器學習的方法性能很大程度上會受到樣本數據的限制,當樣本數據發生較大變化時,性能也會相應的變化,但是ROC曲線往往能夠保持不變,ROC曲線下的面積(area under curve,AUC)越大,也就說明模型的泛化性能相對更好,面對未知的樣本,也能保證一定的性能[22]。圖5(a) 和圖5(b)分別為 KNN 和 SVM 的 ROC 曲線,AUC 分別為0.906和0.920,遠遠大于隨機分類器的AUC值0.5,因此兩者對于飛機尾渦的識別具備良好的魯棒性。

圖5 模型ROC曲線
為更進一步說明模型的效果,使用激光雷達實地探測數據進行測試,識別效果如圖6所示。

圖6 尾渦實測識別效果
圖6中左上角表示的是尾渦存在的概率值,通過3.2節訓練好的模型,可得出SVM模型中的最佳超平面,根據最佳超平面的劃分方法以及提取的徑向風場數據特征,可確定數據樣本是否存在尾渦,然后通過仿真SVM中的擬合sigmoid模型,最終得到該樣本尾渦存在的概率。圖6從上至下分別為靜風無尾渦、靜風有尾渦、背景風干擾有尾渦和靜風不明顯尾渦,識別尾渦存在的概率分別為7%、96%、83%和92%,給出正負樣本的判斷有足夠的差別,均能夠正確識別,對本文中提到的影響尾渦識別的場景具備較好的抵抗性。
5 結論
本文將徑向風場中的尾渦的識別問題,抽象成機器學習中的二分類問題,提出了考慮不同環境因素下的基于SVM的飛機尾渦識別方法。該方法提取尾渦的速尾度極差特征,并結合溫度、氣壓、風速、風向這四種環境因素,建立對應的特征向量和目標函數。在上述基礎上,通過網格搜索和交叉驗證的方法訓練模型,確定模型的最佳參數,得到最佳超平面,通過測試集驗證了訓練模型的優良性,識別飛機尾渦的平均性能達到0.85以上,AUC超過0.9,具備一定的泛化性能,同時SVM方法在與KNN的飛機尾渦識別方法對比過程中,表現出更優的識別性能,結合項目組實際探測的雷達數據進行模型驗證,驗證結果顯示在靜風環境或者有一定背景風場存在的情況下,SVM方法能夠有效識別具備明顯特征和不明顯特征的飛機尾渦。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
光學精密工程(2016年6期)2016-11-07 09:07:19
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
