捷聯(lián)星光復(fù)合制導(dǎo)修正方法研究
2021-05-06 07:46:50王勝永林海奇
兵器裝備工程學(xué)報(bào) 2021年4期
張 青,王勝永,傅 瑜,王 勇,林海奇
(北京宇航系統(tǒng)工程研究所, 北京 100076)
在航天技術(shù)不斷發(fā)展的今天,現(xiàn)代飛行器對(duì)導(dǎo)航精度要求越來(lái)越高。若單純依靠慣性制導(dǎo)系統(tǒng)提高導(dǎo)航精度,將帶來(lái)極大的技術(shù)難度和成本的急劇增加[1]。慣性星光復(fù)合制導(dǎo)是解決此問題的有效途徑。相比于平臺(tái)星光復(fù)合制導(dǎo),捷聯(lián)星光復(fù)合制導(dǎo)具有體積小、重量輕、成本低、可靠性高、便于維護(hù)等優(yōu)點(diǎn),已經(jīng)成為高性能導(dǎo)航的重要發(fā)展方向。
目前,國(guó)內(nèi)已經(jīng)有一些機(jī)構(gòu)對(duì)捷聯(lián)星光制導(dǎo)系統(tǒng)展開了研究。文獻(xiàn)[2]提出了基于慣性星光測(cè)量信息的飛行器關(guān)機(jī)點(diǎn)速度位置誤差分離方法;文獻(xiàn)[3]和文獻(xiàn)[4]介紹了星光修正原理,并提出了基于卡爾曼濾波的星光修正方法;文獻(xiàn)[5]對(duì)捷聯(lián)星光復(fù)合制導(dǎo)方案的即時(shí)修正效果進(jìn)行了分析;文獻(xiàn)[6]研究了星光測(cè)量信息修正捷聯(lián)慣性導(dǎo)航初始對(duì)準(zhǔn)誤差的方法;文獻(xiàn)[7]提出了捷聯(lián)星光制導(dǎo)仿真的方法與流程;文件[8] 對(duì)捷聯(lián)星光雙星修正方案對(duì)制導(dǎo)精度和星光觀測(cè)信息的影響情況進(jìn)行了數(shù)學(xué)仿真;文獻(xiàn)[9]對(duì)比分析了雙星修正和單星修正兩種方案的特點(diǎn)。
雖然許多研究人員已經(jīng)對(duì)捷聯(lián)星光修正方法進(jìn)行了大量研究,并提出了多種修正方法,但是各種方法在工程上的適用對(duì)象和使用條件均未明確,部分情況存在較大局限性。本文建立了星光測(cè)量模型、慣性系統(tǒng)誤差模型和星光修正模型,提出了兩種工程上實(shí)際可用的捷聯(lián)星光修正方法,并通過仿真算例研究了兩種方法的適用情況。
1 坐標(biāo)系定義
1) 發(fā)射慣性坐標(biāo)系OXIYIZI。坐標(biāo)系原點(diǎn)O位于發(fā)射點(diǎn);OXI軸在發(fā)射點(diǎn)水平面內(nèi),指向發(fā)射瞄準(zhǔn)方向;OYI軸與垂直于發(fā)射點(diǎn)水平面,方向向上;OZI軸在當(dāng)?shù)厮矫鎯?nèi),三軸構(gòu)成右手正交坐標(biāo)系。發(fā)射后坐標(biāo)系不隨地球轉(zhuǎn)動(dòng),成為慣性坐標(biāo)系。星光矢量在發(fā)射慣性系中的表示如圖1所示。
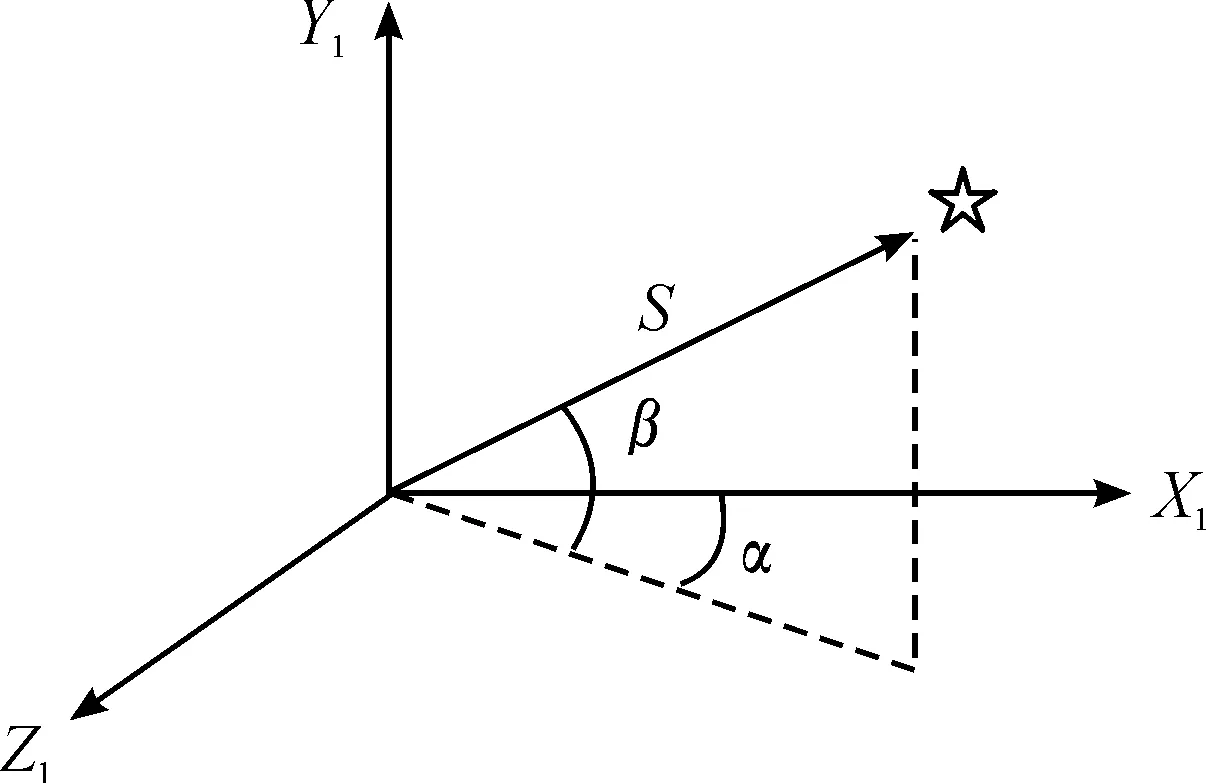
圖1 星光矢量在發(fā)射慣性坐標(biāo)系中的表示
2) 飛行器坐標(biāo)系OXbYbZb。坐標(biāo)系原點(diǎn)O位于飛行器質(zhì)心;OXB軸沿飛行器的縱軸指向頭部方向;OYB軸在飛行器的縱平面內(nèi)與OXB軸垂直且指向上方;OZB軸與OXB、OYB軸構(gòu)成右手正交坐標(biāo)系。飛行器在發(fā)射慣性坐標(biāo)系中的角位置由俯仰角φa、偏航角ψa和滾動(dòng)角γa確定。則發(fā)射慣性坐標(biāo)系到飛行器坐標(biāo)的轉(zhuǎn)換矩陣可以表示為
(1)
3) 導(dǎo)航坐標(biāo)系OXnYnZn。捷聯(lián)慣導(dǎo)系統(tǒng)在求解導(dǎo)航參數(shù)時(shí)所采用的坐標(biāo)系,即數(shù)學(xué)平臺(tái),在沒有誤差的情況下,坐標(biāo)軸方向與發(fā)射慣性系一致。
4) 星敏感器坐標(biāo)系OXSYSZS。星敏感器坐標(biāo)系原點(diǎn)O位于光學(xué)鏡頭的焦平面(CCD)中心;OXS軸與光學(xué)鏡頭軸線一致;YSOZS平面與CCD所在平面一致,OYS軸為CCD像元垂直讀出方向,OZS軸為CCD像元水平讀出方向。它與飛行器坐標(biāo)系之間的轉(zhuǎn)換關(guān)系在星敏感器安裝時(shí)即已確定。星光矢量在星敏感器坐標(biāo)系中的表示見圖2。
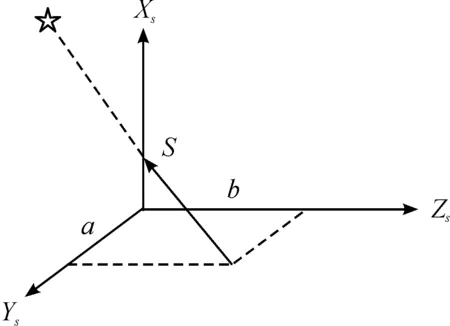
圖2 星光矢量在星敏感器坐標(biāo)系中的表示
2 捷聯(lián)星光測(cè)量模型
捷聯(lián)星光復(fù)合制導(dǎo)系統(tǒng)是將星敏感器和捷聯(lián)慣組固連安裝在飛行器上,通過對(duì)預(yù)先設(shè)定的兩顆及以上恒星進(jìn)行測(cè)量,估計(jì)導(dǎo)航坐標(biāo)系相對(duì)理論發(fā)射慣性坐標(biāo)系的漂移角,并以此來(lái)修正慣性器件的基準(zhǔn)誤差引起的落點(diǎn)偏差,其相應(yīng)的制導(dǎo)方案原理如圖3所示。
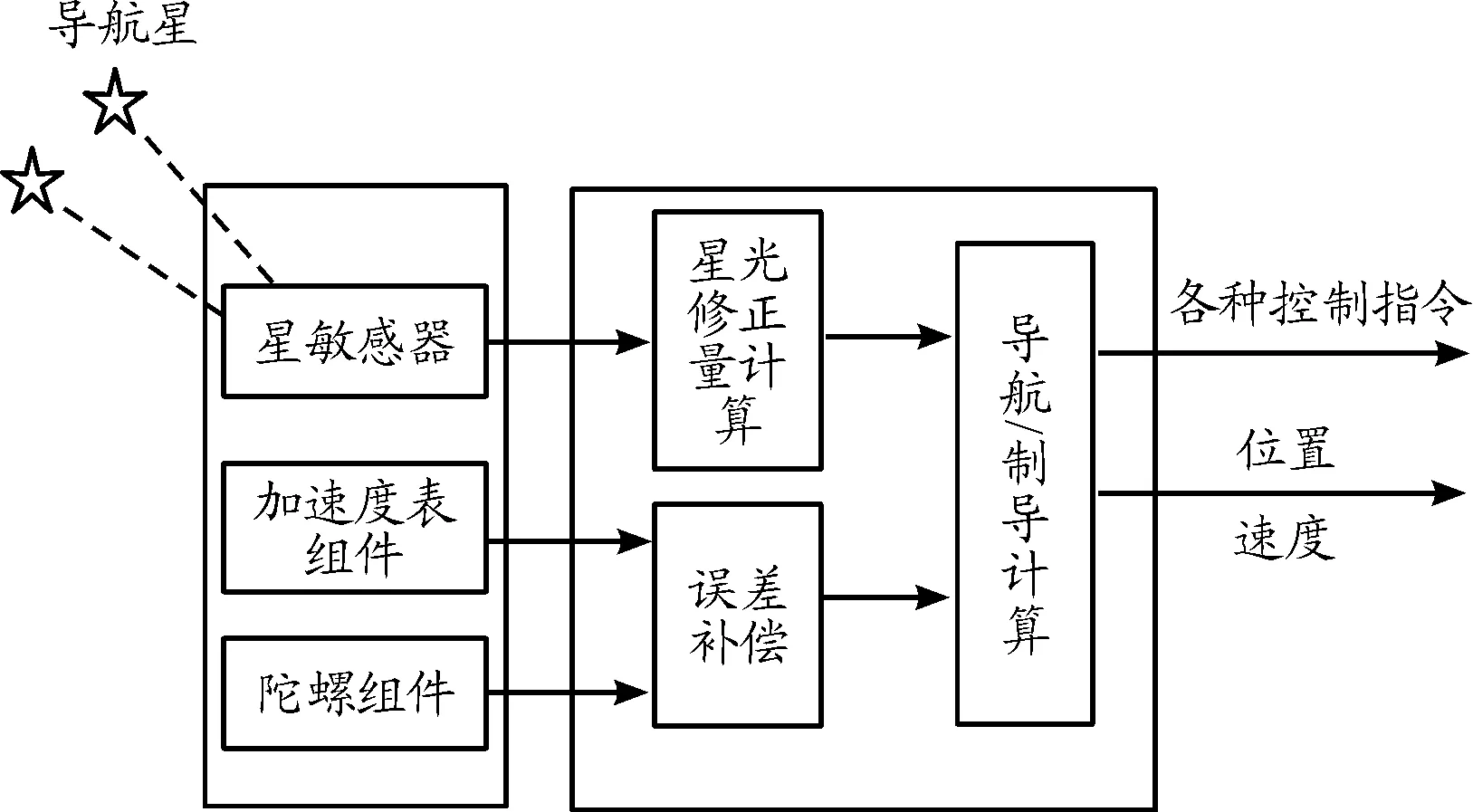
圖3 捷聯(lián)/星光復(fù)合制導(dǎo)方案示意圖


(2)


(3)
由式(2)和式(3)可以推導(dǎo)得到,星敏感器測(cè)量輸出量ΔφS、ΔψS與姿態(tài)誤差αx、αy、αz的關(guān)系,即:
(4)
飛行器對(duì)空間內(nèi)兩顆恒星進(jìn)行測(cè)量時(shí),可以得到:

(5)
式中,ΔφS1、ΔψS1和ΔφS2,ΔψS2分別為兩顆恒星的星敏感器測(cè)量輸出;φa1、ψa1、γa1為測(cè)量第一顆導(dǎo)航星時(shí)的飛行器姿態(tài)角;φa2、ψa2、γa2為測(cè)量第二顆導(dǎo)航星時(shí)的飛行器姿態(tài)角。
根據(jù)式(5),可以由兩顆導(dǎo)航星星光測(cè)量輸出量求解得到導(dǎo)航坐標(biāo)系到發(fā)射慣性坐標(biāo)系的姿態(tài)誤差αx、αy、αz(簡(jiǎn)稱數(shù)學(xué)平臺(tái)漂移角),進(jìn)而利用星光修正方法能夠?qū)υ撜`差進(jìn)行修正。因此,捷聯(lián)星光修正能夠?qū)λ幸饠?shù)學(xué)平臺(tái)漂移角的誤差進(jìn)行修正,對(duì)無(wú)法引起數(shù)學(xué)平臺(tái)漂移角的誤差不能進(jìn)行修正。
3 捷聯(lián)星光工具誤差模型
3.1 陀螺儀誤差模型
陀螺儀誤差模型如下:
δωx1=D0x+K1bx·ωx1
δωy1=D0y+K1by·ωy1
δωz1=D0z+K1bz·ωz1
(6)
式中,ωx1、ωy1、ωz1為飛行器角速度在飛行器坐標(biāo)系內(nèi)的投影;δωx1、δωy1、δωz1為飛行器角速度誤差在飛行器坐標(biāo)系內(nèi)的投影;D0x、D0y、D0z為陀螺儀與角速度無(wú)關(guān)的誤差系數(shù);K1bx、K1by、K1bz為陀螺儀與角速度一次方成比例的誤差系數(shù)。
飛行器姿態(tài)角變化率誤差與飛行器角速度誤差關(guān)系[10]如下:
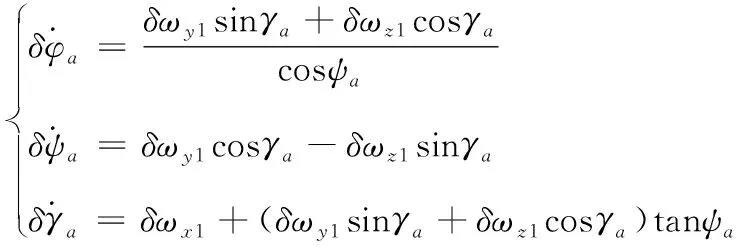
(7)
通過對(duì)式(7)積分可以得到姿態(tài)角誤差Δφa、Δψa、Δγa,進(jìn)而得到導(dǎo)航坐標(biāo)系到發(fā)射慣性坐標(biāo)系的姿態(tài)誤差αqx、αqy、αqz,即:
(8)
因此,陀螺儀誤差將引起數(shù)學(xué)平臺(tái)漂移角,能夠通過星光測(cè)量進(jìn)行修正。
3.2 加速度計(jì)誤差模型
加速度計(jì)誤差模型如下:
(9)
可以看到加速度計(jì)誤差不會(huì)引起數(shù)學(xué)平臺(tái)漂移角,因此星光修正無(wú)法對(duì)加速度計(jì)誤差進(jìn)行修正。
3.3 初始對(duì)準(zhǔn)誤差模型
初始對(duì)準(zhǔn)誤差將直接導(dǎo)致導(dǎo)航坐標(biāo)系相對(duì)發(fā)射慣性坐標(biāo)系存在角度偏差,因此星光修正能夠?qū)Τ跏紝?duì)準(zhǔn)誤差進(jìn)行修正,其誤差模型如下:
(10)
式中,kp0x、kp0y、kp0z為三方向初始對(duì)準(zhǔn)誤差。
4 捷聯(lián)星光修正模型
采用星光復(fù)合制導(dǎo)方案時(shí),通過測(cè)量2顆恒星,利用式(5)可以解算得到由各項(xiàng)誤差引起的數(shù)學(xué)平臺(tái)漂移角。對(duì)該漂移角引起的偏差進(jìn)行修正,則可提高飛行器導(dǎo)航精度。
相同的數(shù)學(xué)平臺(tái)漂移角下,不同星光修正方法得到的星光修正效果不同,對(duì)應(yīng)的飛行器導(dǎo)航偏差也不同。下面針對(duì)修正系數(shù)法和直接補(bǔ)償法2種星光修正方法進(jìn)行詳細(xì)介紹。
4.1 修正系數(shù)法
修正系數(shù)法是利用飛行前計(jì)算得到的星光修正系數(shù)和飛行過程中測(cè)量得到的星光測(cè)量輸出值,計(jì)算由數(shù)學(xué)平臺(tái)漂移角引起的導(dǎo)航偏差,即星光修正量,可以表示為
(11)
式中,ΔLs、ΔHs為縱橫向星光修正量;u1αx、u1αy、u1αz、u2αx、u2αy、u2αz為星光修正系數(shù);αx、αy、αz為利用星光測(cè)量量解算得到的數(shù)學(xué)平臺(tái)漂移角。
(12)
式中,δL、δH為飛行器綜合縱橫向落點(diǎn)偏差;ΔL、ΔH為由捷聯(lián)慣性系統(tǒng)引起的縱橫向偏差偏差[12]。
4.2 直接補(bǔ)償法
捷聯(lián)星光復(fù)合制導(dǎo)方案下,除了修正系數(shù)法外,還可以利用直接補(bǔ)償法進(jìn)行星光修正。通過星光測(cè)量輸出值解算得到數(shù)學(xué)平臺(tái)漂移角,對(duì)引起數(shù)學(xué)平臺(tái)漂移角的誤差項(xiàng)進(jìn)行權(quán)重配置,并基于該權(quán)重及相關(guān)誤差模型,采用飛行器真實(shí)軌跡參數(shù)計(jì)算得到由數(shù)學(xué)平臺(tái)漂移角引起的視速度誤差δW和視位置差δS,然后利用式(13)對(duì)飛行速度導(dǎo)航參數(shù)、位置導(dǎo)航參數(shù)進(jìn)行直接補(bǔ)償。
(13)
對(duì)于動(dòng)基座發(fā)射的飛行器,初始對(duì)準(zhǔn)誤差較大,采用直接補(bǔ)償法進(jìn)行星光修正時(shí),一般將數(shù)學(xué)平臺(tái)漂移角當(dāng)作初始對(duì)準(zhǔn)誤差進(jìn)行視速度誤差、視位置誤差進(jìn)行計(jì)算,即:
(14)
直接補(bǔ)償法下,星光修正量計(jì)算方法如下式所示:
(15)
4.3 捷聯(lián)星光修正流程圖
捷聯(lián)星光修正流程框圖見圖4。可以看到,無(wú)論采用哪種方法進(jìn)行捷聯(lián)星光修正,都需要提前預(yù)估飛行軌跡,并選取導(dǎo)航星。采用修正系數(shù)法進(jìn)行修正時(shí),還需要基于地面試驗(yàn)獲取各項(xiàng)誤差的估計(jì)值,計(jì)算星光修正系數(shù),測(cè)星后計(jì)算星光修正量,對(duì)目標(biāo)點(diǎn)偏差進(jìn)行修正,減小飛行偏差;采用直接補(bǔ)償法進(jìn)行修正時(shí),測(cè)星后利用實(shí)際飛行軌跡計(jì)算速度偏差、位置偏差,直接對(duì)飛行導(dǎo)航參數(shù)進(jìn)行修正,減小飛行偏差。
因此,從方法上來(lái)看,修正系數(shù)法更加依賴于飛行前的信息,而直接補(bǔ)償法要求準(zhǔn)確解算數(shù)學(xué)平臺(tái)漂移角引起的速度偏差和位置偏差。

圖4 捷聯(lián)星光修正流程框圖
5 仿真算例
由3.2可知,采用星光復(fù)合制導(dǎo)方案無(wú)法對(duì)加速度計(jì)誤差進(jìn)行修正。因此,為了更加清楚說(shuō)明不同星光修正方法的效果,本節(jié)在設(shè)計(jì)仿真算例時(shí),僅考慮可以進(jìn)行修正的陀螺儀誤差和初始對(duì)準(zhǔn)誤差。表1中給出了5種仿真條件(仿真變量具體含義見第3節(jié)內(nèi)容),分別說(shuō)明陀螺儀誤差、初始對(duì)準(zhǔn)誤差及其估計(jì)值的準(zhǔn)確度(通過地面試驗(yàn)獲得誤差估計(jì)值,其與誤差實(shí)際值一般存在差異,差異的大小與地面試驗(yàn)的方法、周期等相關(guān))對(duì)2種方法星光修正效果的影響。
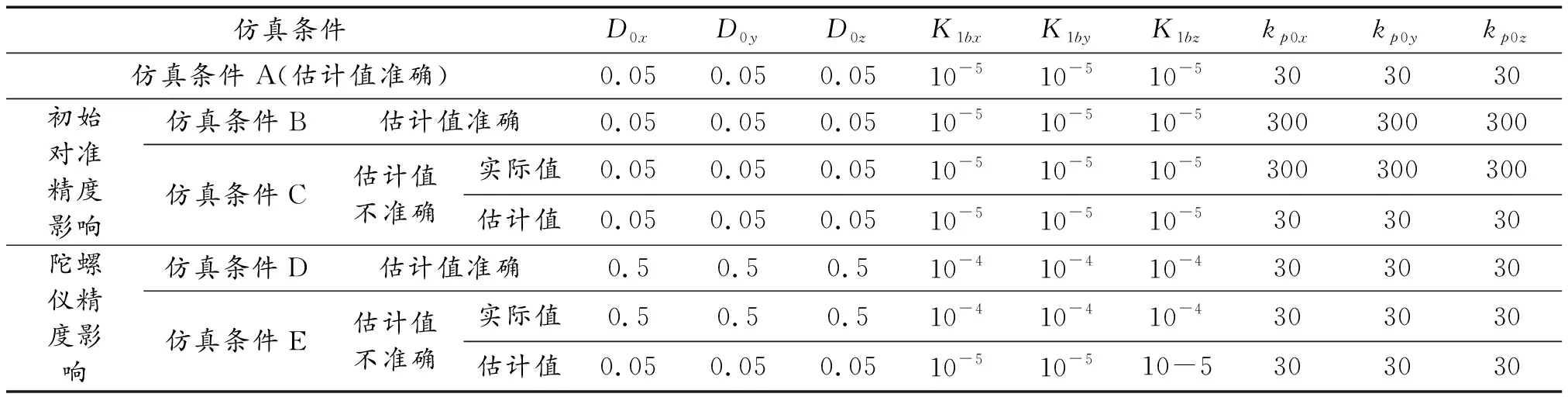
表1 仿真條件
依據(jù)表1中的仿真條件,對(duì)2種星光修正方法的落點(diǎn)偏差進(jìn)行仿真計(jì)算,結(jié)果見表2。
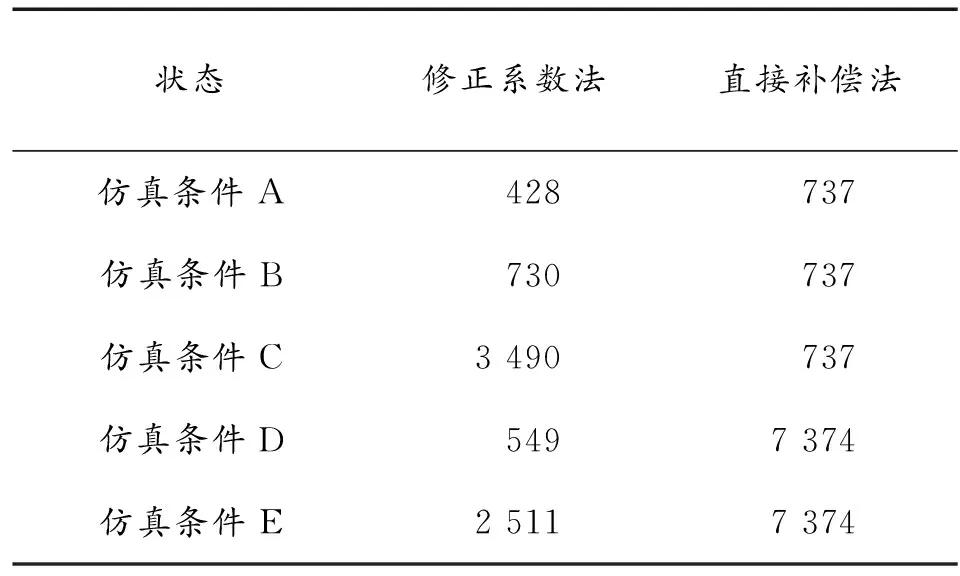
表2 落點(diǎn)偏差的仿真計(jì)算結(jié)果 m
通過分析仿真結(jié)果可以看到:
1) 分別對(duì)比算例B和算例C、算例D和算例E,可以看到無(wú)論是陀螺儀誤差還是初始對(duì)準(zhǔn)誤差,誤差的估計(jì)值與實(shí)際值存在差異時(shí),采用修正系數(shù)法進(jìn)行星光修正,修正效果降低,落點(diǎn)偏差增大;采用直接補(bǔ)償法進(jìn)行星光修正,修正效果不受影響;為了進(jìn)一步說(shuō)明該結(jié)論,開展了2種方法落點(diǎn)偏差隨初始對(duì)準(zhǔn)誤差準(zhǔn)確度變化的仿真分析,結(jié)果見圖5。
2) 分別對(duì)比算例A和算例B、算例A和算例D,可以看到當(dāng)誤差估計(jì)值與實(shí)際值一致時(shí),采用修正系數(shù)法進(jìn)行星光修正,陀螺儀誤差變化和初始對(duì)準(zhǔn)誤差變化對(duì)星光修正效果影響均較小;采用直接補(bǔ)償法進(jìn)行星光修正,初始對(duì)準(zhǔn)誤差變化對(duì)星光修正無(wú)影響,但陀螺儀誤差變化對(duì)星光修正影響較大;為了進(jìn)一步說(shuō)明該結(jié)論,開展了2種方法落點(diǎn)偏差隨陀螺儀誤差值變化的仿真分析,結(jié)果見圖6。
3) 對(duì)比算例A和算例E,可以看到陀螺儀誤差實(shí)際值相對(duì)于估計(jì)值變差時(shí),采用修正系數(shù)法和直接補(bǔ)償法進(jìn)行星光修正,修正效果都會(huì)降低,但直接補(bǔ)償法下導(dǎo)航精度降低更多;為了進(jìn)一步說(shuō)明該結(jié)論,開展了2種方法落點(diǎn)偏差隨陀螺儀誤差值及估計(jì)值值準(zhǔn)確度變化的仿真分析,結(jié)果見圖7。

圖5 初始對(duì)準(zhǔn)誤差估計(jì)值準(zhǔn)確度對(duì)落點(diǎn)偏差的影響曲線

圖6 陀螺儀誤差變化對(duì)落點(diǎn)偏差的影響曲線
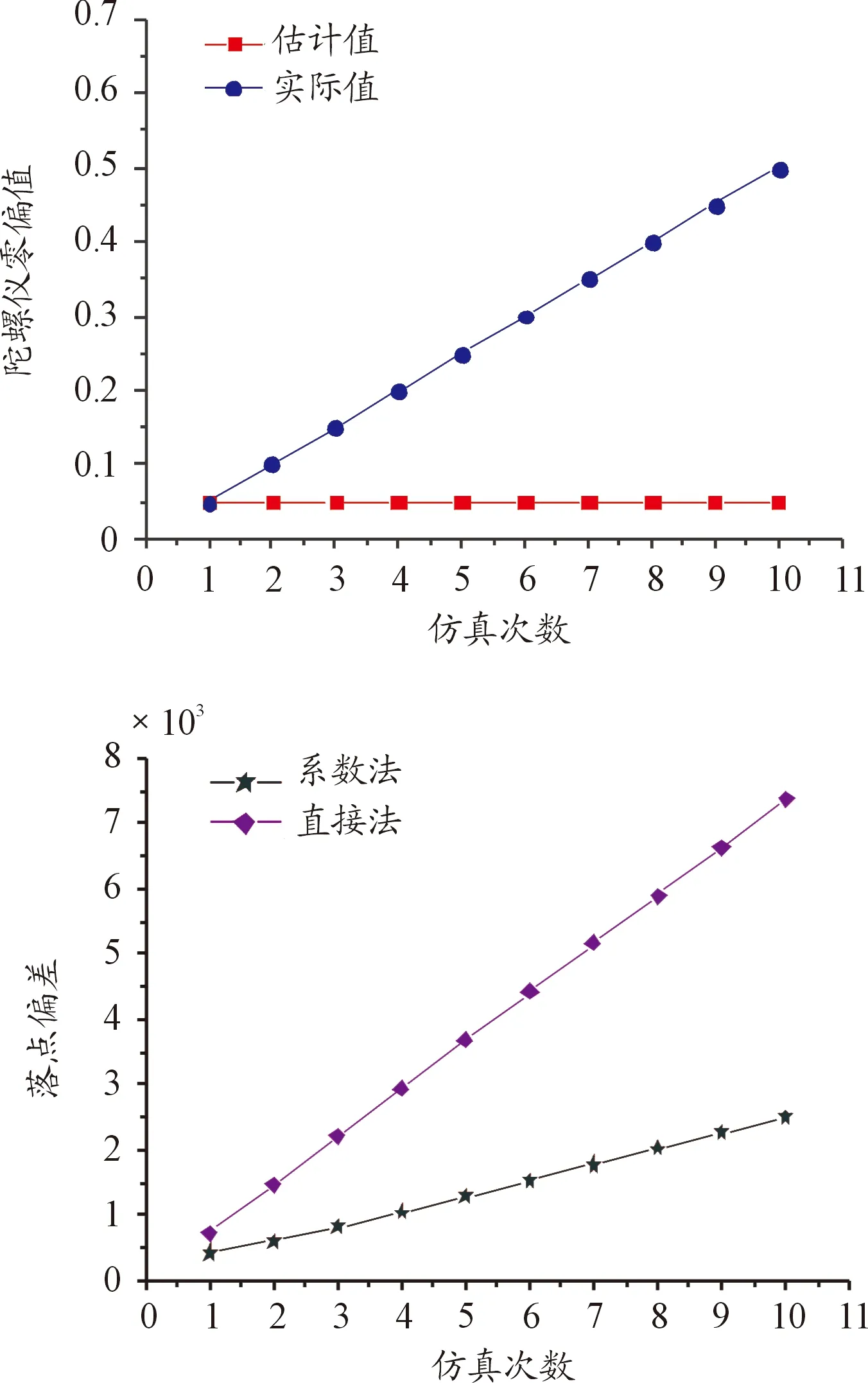
圖7 陀螺儀誤差值及準(zhǔn)確度對(duì)落點(diǎn)偏差的影響曲線
6 結(jié)論
本文重點(diǎn)對(duì)捷聯(lián)星光復(fù)合制導(dǎo)方案2種修正方法——修正系數(shù)法和直接補(bǔ)償法,進(jìn)行了建模與算例仿真分析,可以看到儀表誤差特性不同,2種修正方法的應(yīng)用效果不同。其主要原因在于:
1) 修正系數(shù)法需要基于儀表誤差估計(jì)值計(jì)算修正系數(shù),該系數(shù)與儀表誤差估計(jì)值相匹配,當(dāng)儀表誤差實(shí)際表現(xiàn)值與地面估計(jì)值一致時(shí),星光修正效果好,當(dāng)儀表誤差實(shí)際表現(xiàn)值與地面估計(jì)值存在較大差異時(shí),修正系數(shù)與儀表誤差的實(shí)際值不再匹配,導(dǎo)致修正系數(shù)法修正效果降低;
2) 直接補(bǔ)償法是在飛行器飛行過程中,通過觀星直接解算得到數(shù)學(xué)平臺(tái)漂移角,與儀表誤差的地面估計(jì)值無(wú)關(guān),因此地面估計(jì)值的準(zhǔn)確度不影響直接補(bǔ)償法的星光修正效果;但是由于無(wú)法區(qū)分陀螺儀誤差和初始對(duì)準(zhǔn)誤差引起數(shù)學(xué)平臺(tái)漂移角的比例,一般按照初始對(duì)準(zhǔn)誤差對(duì)漂移角修正,當(dāng)陀螺儀誤差實(shí)際值較大時(shí),直接補(bǔ)償法星光修正效果大幅降低。
通過本文分析,可以提出2種星光修正方法的適用條件:儀表誤差地面估計(jì)值與實(shí)際表現(xiàn)值一致性較好時(shí),應(yīng)采用修正系數(shù)法進(jìn)行星光修正;初始對(duì)準(zhǔn)誤差地面估計(jì)值與實(shí)際表現(xiàn)值差異較大時(shí),應(yīng)采用直接補(bǔ)償法進(jìn)行星光修正;陀螺儀誤差地面估計(jì)值與實(shí)際表現(xiàn)值差異較大時(shí),2種方法修正效果均降低,應(yīng)考慮提升陀螺儀精度或改善地面試驗(yàn)方法。
