基于指數收斂觀測器的協調臂自適應滑模控制
2021-05-06 07:46:20潘潤超李志剛
兵器裝備工程學報 2021年4期
關鍵詞:設計
潘潤超,李志剛
(南京理工大學 機械工程學院, 南京 210094)
彈藥自動裝填技術是中大口徑火炮武器系統的核心關鍵技術之一,彈丸協調器采用直線油缸擺動支撐的方式驅動,用于把彈丸從接彈位協調到與身管平行的位置,要求具有較高的定位精度,并且定位過程平穩,無沖擊[1]。本文研究的對象實際表現為電液伺服系統驅動的高速重載機械臂,液壓油缸負載力變化顯著,協調器本體在液壓油缸驅動下繞耳軸運動,且液壓油缸負載力隨協調角度變化而變化。電液非線性系統中參數的不確定性以及時變干擾會嚴重惡化控制器性能,使協調器的高精度運動跟蹤控制器的設計變得困難,因此彈丸協調臂控制策略的研究對提高火炮射速具有重要意義。Yao等[2]在研究單桿液壓油缸驅動機械臂的跟蹤控制問題時,針對液壓系統中伺服閥部件的動態以及非線性摩擦等因素,設計了一種非連續投影算法的自適應魯棒控制器,獲得了較好的控制效果。但上述自適應魯棒控制算法集成了反演控制技術,要求虛擬控制律可導,控制律較為復雜。王海燕[3]提出了一種基于反步法的高階非線性滑模變結構控制,保證了對不匹配擾動和不確定性參數的魯棒性,將魯棒滑模觀測器附加到閉環控制系統中,用于估計未測量狀態,實現輸出反饋控制。鄒權[4]采用了自適應算法在線估計系統中不確定參數,引入了一種非連續性投影算法,保證參數估計的有界性。同時把切換增益設置成系統的函數,當誤差較大切換增益較大,隨著誤差減小,切換增益也相應減小,同時達到了削弱抖振和保證切換增益有界性的目的。趙倩婷[5]針對電液伺服系統同時存在參數不確定性和不確定非線性問題,提出了一種基于干擾觀測器的魯棒積分控制策略,通過將誤差符號魯棒積分與FTDO融合,實現對未觀測干擾的抑制。Rigatos[6]在研究具有未知非線性參數的電液伺服系統的控制問題時,假設系統的初始控制體積是未知的,通過設計一種新型的Lyapunov函數得到了漸進穩定的自適應滑模控制器和自適應律,實驗結果證明了算法的有效性。郭新平[7]針對電液伺服系統工況的復雜性以及隨機外負載干擾問題,設計了擴張觀測器對系統進行在線觀測,同時該觀測器還對活塞桿的位置和速度信號進行估計,利用觀測器所觀測信號,基于滑模控制理論設計了滑模變結構控制算法,對所提出的控制策略進行了穩定性理論分析。劉金琨[8]針對受到緩慢變化干擾的系統,設計了一種的非線性指數收斂觀測器,能在滑模控制中對干擾進行補償,有效降低切換增益,從而有效降低抖振。楊善平[9]提出了基于K觀測器的動態面控制策略,使用所設計的自適應律,估計了系統狀態方程中的未知參數,通過定義邊界層誤差及Lyapunov函數,證明了控制器的穩定,解決了電液系統非線性非匹配問題。劉龍[10]針對電液位置伺服系統匹配與不匹配模型不確定問題,設計滑模觀測器估計模型不確定性,并且將觀測器滑模面引入控制器中構造新的控制器滑模面,消除不確定的估計誤差。李波等[11]考慮到電液伺服系統中各種非線性因素以及參數不確定性,構建了伺服系統的非線性模型,同時使用參數自適應律對不定參數進行補償,并在反演控制器中引入滑模控制,實驗結果證明此方法能有效提升電液系統抗干擾能力。
在以上文獻的基礎上,針對非線性電液伺服系統存在參數不確定和擾動的問題,提出了一種基于指數收斂干擾觀測器的自適應滑模控制策略。該策略采用指數收斂干擾觀測器在線準確估計電液伺服系統擾動大小并在滑模控制律中進行補償,然后利用自適應律去估計系統中的變化參數,引入一種非連續投影算法保證自適應估計參數的有界性。同時設計了一種基于指數收斂的滑模動態面,當誤差s較大時,系統能以較大的速度趨近于滑動模態,解決大階躍響應問題;當誤差s很小時,趨近速度是ε而不是零,可以保證有限時間內到達滑動模態,仿真結果證明該控制策略能有效估計出變化參數與擾動大小,保證協調器在運動過程中有良好的動態精度與穩態精度。
1 問題描述與動力學模型
1.1 彈丸協調臂機械部分動力學建模
彈丸協調臂電液伺服系統模型如圖1所示,火控系統根據所需協調角度設計運動軌跡,并將命令輸入給上位機,結合傳感器反饋的油缸兩腔壓力計算所需控制電壓,控制伺服閥閥芯位移大小來調節運動快慢,使之達到理想的動態品質與穩態精度。彈丸協調器的工作原理為從接彈位將彈丸協調運動到與身管平行的輸彈位。整個過程要求平穩,無沖擊,到位誤差控制在以內,以保持較高的卡膛一致性,從而保證火炮彈藥自動裝填系統可靠性,提高火炮射速。
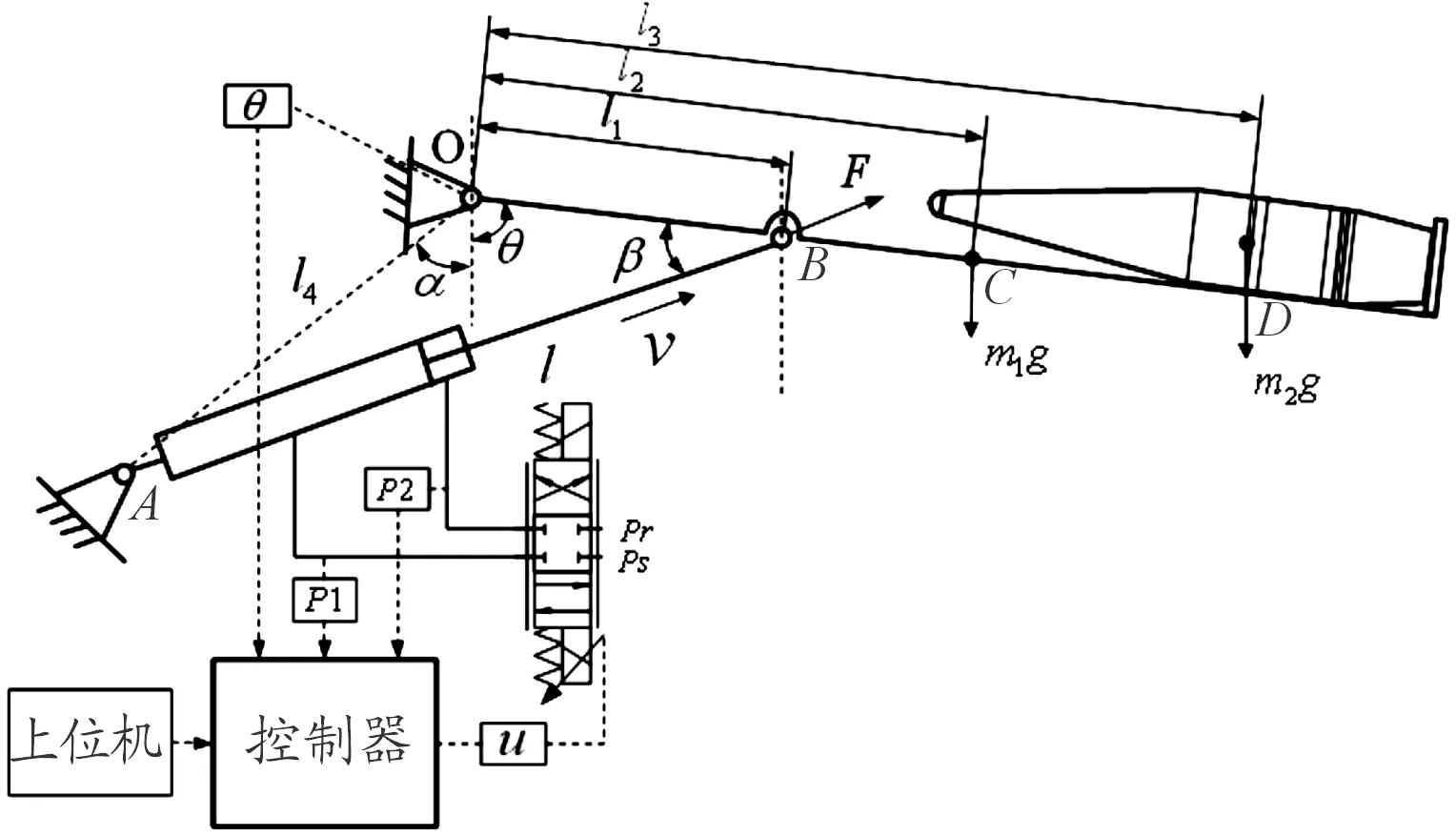
圖1 彈丸協調臂電液伺服系統模型示意圖
圖1模型中點A,點O為系統兩固定支撐點,點為油缸支撐彈丸協調臂運動支點,點C和點D分別為協調臂質心和彈丸質心。具體參數定義如下:l為固定支點A與運動支點B之間的距離,l1為油缸支撐彈丸協調臂運動支點B到固定支撐點O的距離,l2和l3分別為協調臂架體質心和彈丸質心到固定支撐點O的距離,l4為固定支撐點A和固定支撐點O之間的距離,α為l4與豎直方向的夾角,θ為協調器協調角度,變化范圍為0~90°,β為油缸推桿與協調臂架體夾角,F為油缸推力,m1g為協調器架體所受重力,m2g為彈丸所受重力,P1為油缸無桿腔壓力,P2為油缸有桿腔壓力,Ps和Pr分別為供油壓力和回油壓力,u為控制器輸出到伺服閥的電壓信號。
彈丸協調臂運動方程可表示為:
(1)
1.2 彈丸協調臂液壓部分動力學建模
油缸兩腔的流量方程可表示為:
(2)
式中:Q1和Q2分別為油缸無桿腔和無桿腔進油量或回油量;Cd為流量系數;閥芯位移為xv=kvu,其中kv為伺服閥和放大器總增益;u為控制器輸出控制電壓;W為閥口面積梯度;ρ為液壓油密度;且0≤Pr≤P1≤Ps,0≤Pr≤P2≤P1;s(xv)為閥芯位移的函數,定義為:
(3)
油缸兩腔的連續性方程為:
(4)
1.3 彈丸協調臂狀態方程推導
油缸兩腔壓力平衡方程為:
A1P1-A2P2=F
(5)
結合式(1)~式(5)可得:
(6)
K1、K2、K3和ΔF均為非線性未知可變函數,具體表達式為:

取狀態變量x1、x2、x3,分別代表的物理含義為協調臂運動角度、速度、加速度;為了控制器推導時方便,可把位置的三階導數放在等式左邊,并且將d=-ΔF/K1、a=-K2/K1、b=-K3/K1、c=1/K1代入式(6),整理式(6)可得系統的狀態方程為:
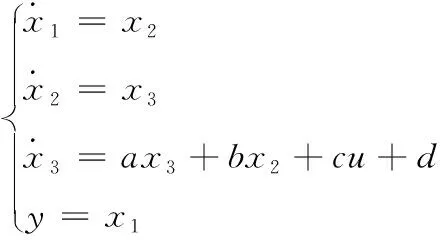
(7)

在非線性電液系統中,由于外界負載變化、體積彈性模量、等效阻尼系數等參數都存在不確定性,同時系統受到變化的外界擾動如摩擦,振動等,這些都給控制器的設計帶來了不小的難度。因此在設計控制器時需要考慮到參數的變化性以及擾動的存在。為了方便描述滑模控制器的設計過程,需要進行如下假設:
假設1 參數不確定性項滿足:
N∈ΩN{N:Nmin≤N≤Nmax}
(8)
在式(8)中:Nmin=[N1minN2minN3min]T和Nmax=[N1maxN2maxN3max]T為已知量。此外,假設N1min、N2min、N3min均大于0,且N的一階導數存在且有界。
假設2 擾動項d有界,d|≤D。
2 指數干擾觀測器設計
2.1 指數收斂觀測器設計
設計觀測器的基本思想就是用估計輸出與實際輸出差值對估計值進行修正。針對狀態方程(7)中存在外界干擾項的情況,設計估計誤差導數為:
(9)


(10)
定義輔助參數向量為:
(11)
對式(11)求導得:
(12)
將式(10)代入式(12)得:

(13)
則干擾觀測器可設計為:
(14)
2.2 觀測器穩定性證明
由式(14)可得:

(15)

(16)
將式(12)、式(15)代入式(16)得:
(17)
3 自適應滑模控制器設計
3.1 滑模控制器設計
(18)
對于Laplace算子p,滿足c1+c2p+p2為Hurwitz多項式。結合式(7),式(18)可得:
(19)
設計基于指數趨近律的滑模函數為:
(20)
-ks為指數趨近項,-xite*sgn(s)為等速趨近項,sgn(s) 為符號函數,k和xite均大于零。二者結合能保證結當s較大時,系統能以較大得速度趨近于滑動模態,當s趨近于零時,趨近速度時是xite而不是0,可以保證有限時間內到達。結合式(19),(20)可得到控制律為:
(21)
3.2 自適應律設計與全局穩定性證明

(22)
定義Lyapunov函數為:
(23)
前面在設計干擾觀測器時已證明觀測器穩定性,則:

(24)
取自適應律為:
(25)
將自適應律代入式(23)得:
(26)
(27)
為了防止自適應參數估計值過大造成控制輸入信號u過大或者估計值小于0的情況,需要通過自適應律的設計使估計值的變化在[NminNmax]范圍內,可采取一種映射投影算法,對式(25)進行修正,定義:M=pro(M),而函數pro定義為:
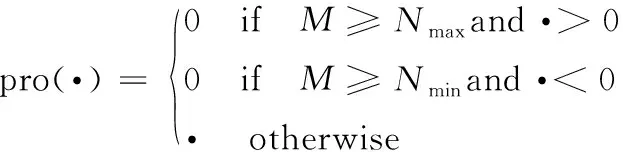
(28)
4 仿真分析與驗證
4.1 彈丸協調臂運動軌跡設計
根據實際系統在Matlab/Simulink里建立彈丸協調臂仿真模型,并設計控制器。為了保證整個運動過程平穩,特別是在啟停階段沒有過大的加速度突變過程,采用S型速度曲線規劃算法,0~1 s內靜止不動,1~2.3 s彈丸協調臂從0°運動到60°,軌跡規劃如圖2所示。
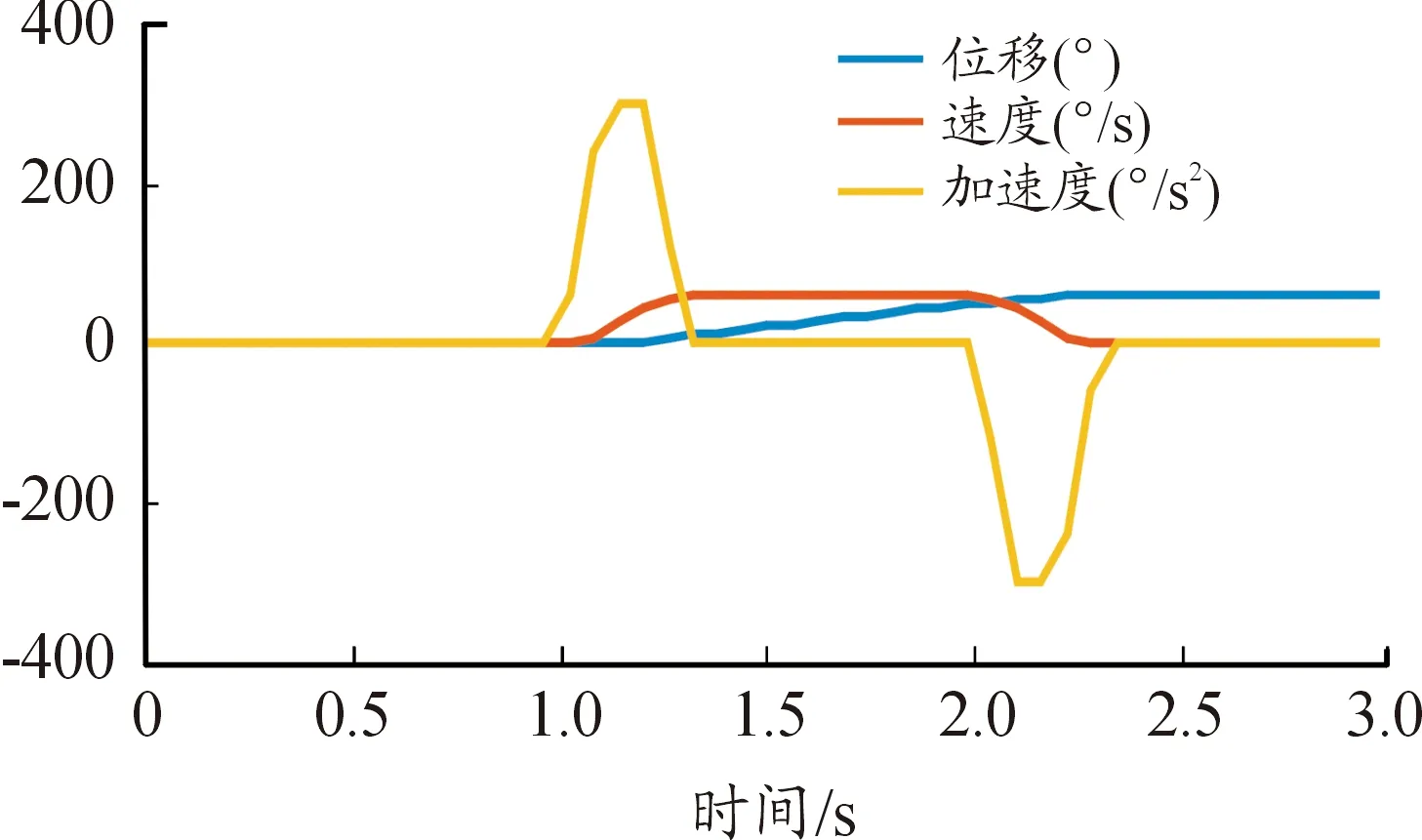
圖2 協調臂的運動軌跡規劃曲線
整個過程讓加速度處于連續變化的規程,沒有加速度突變的情況,有利于控制量不會產生突變,減少了協調臂在運動過程中因為控制量突變而引起的抖動,保證了較好的運動動態品質。
4.2 仿真結果與分析
最終獲得的控制器參數為:K=5e-4、xite=1e-6、c1=120、k=0.011、γ1=2e-10、γ2=1.1e-10、γ3=2e-2。在仿真模型中給系統所加干擾為d=120sin(2πt)+50.6,圖3表示系統控制輸入電壓,大小在-10 V~+10 V內,符合伺服閥輸入要求。單方向向上協調運動,所以控制電壓為正。圖4和圖5為彈丸協調臂系統運動位置誤差和速度誤差。
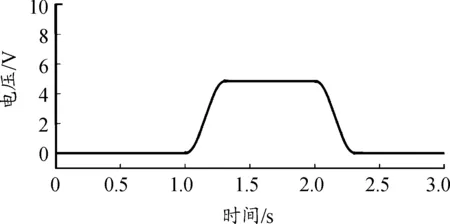
圖3 系統控制輸入電壓曲線
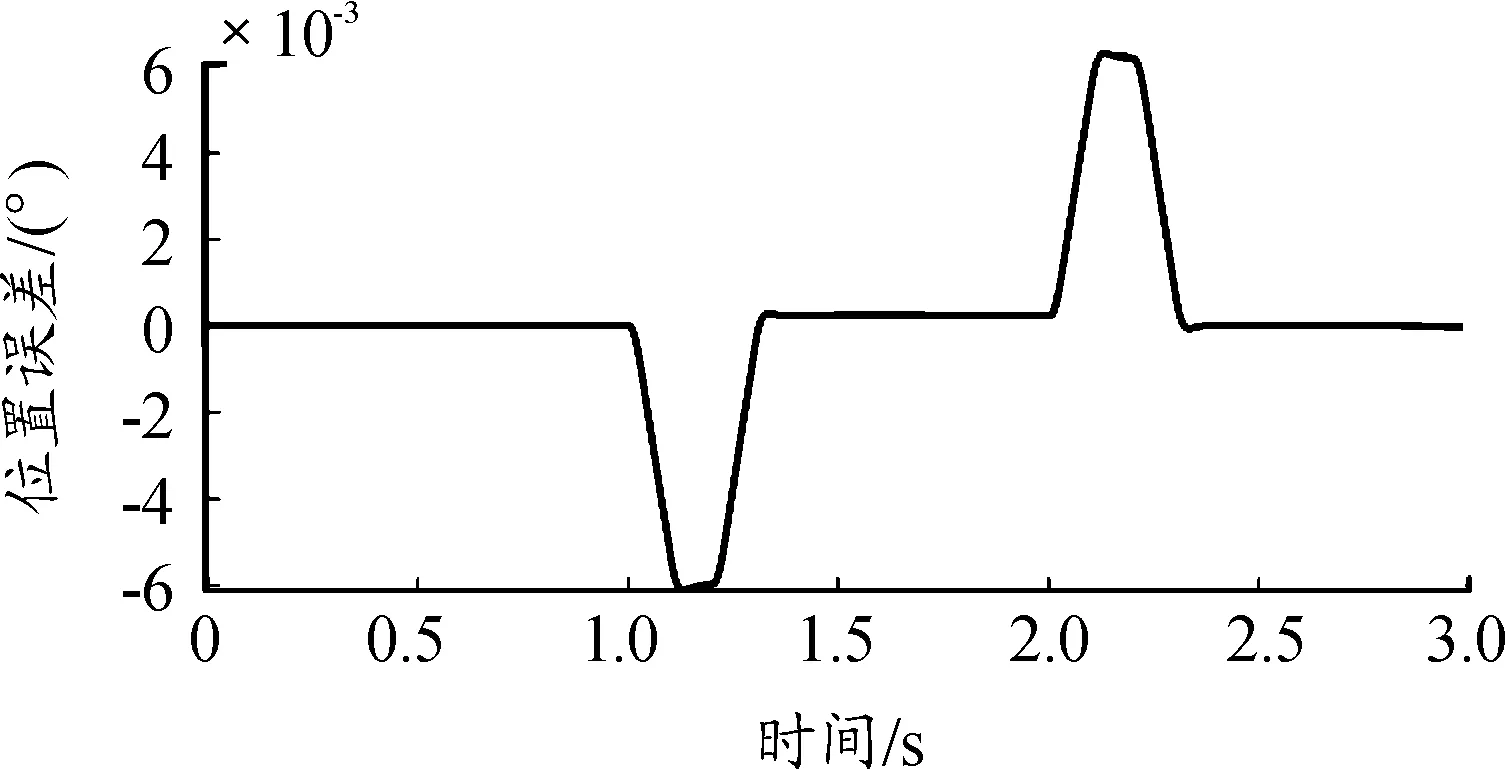
圖4 彈丸協調臂運動位置誤差曲線
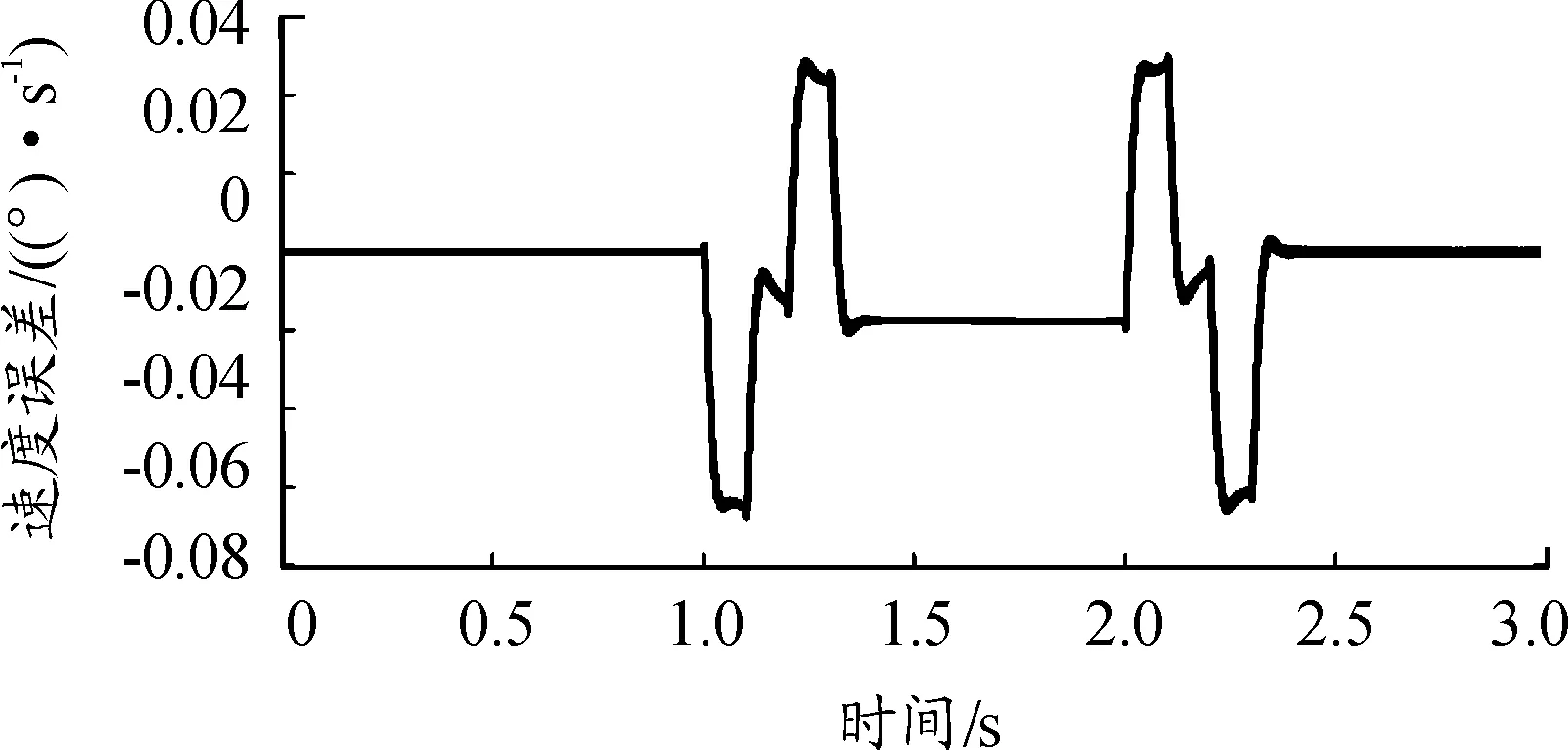
圖5 彈丸協調臂運動速度誤差曲線
從圖4和圖5可知,彈丸協調臂在運動過程當中較為平穩,最大速度動態誤差約為0.06(°)/s,最大位置動態誤差為0.006 3°,到位位置誤差為0.000 83°,滿足實際工況要求。
圖6~圖8為自適應參數估計值變化情況:
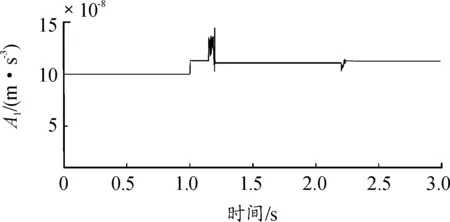
圖6 自適應參數A1估計值曲線

圖7 自適應參數A2估計值曲線
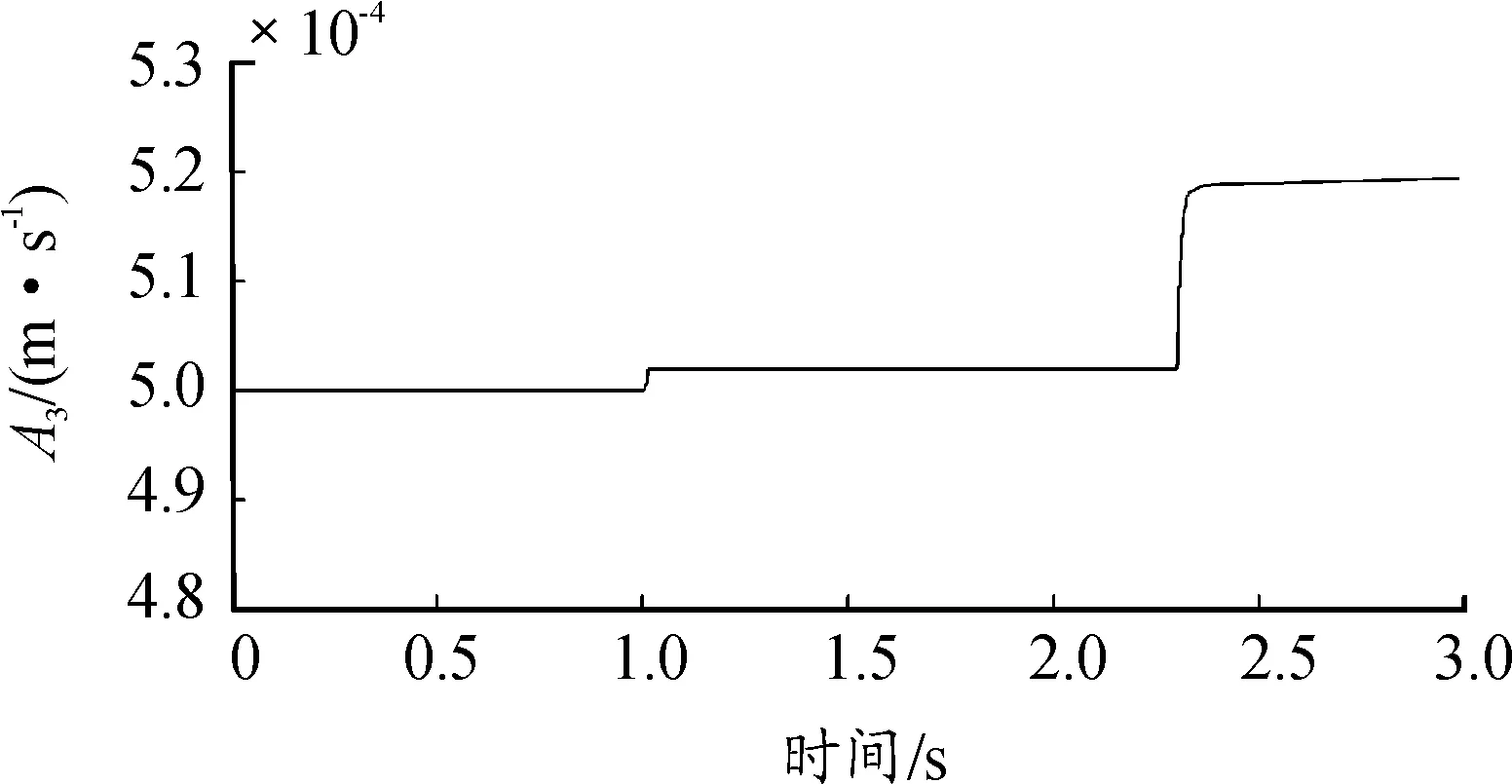
圖8 自適應參數A3估計值曲線
從上面自適應參數估計值可知,在已知3個參數的變化范圍的情況下,為了盡快讓自適應律調整參數以適應系統控制需求,選擇了較合理的初值。由圖5可知,A1實際變化范圍約在1e-7~1.448e-7;A2變化范圍約為1.2e-10~4.132e-10;A3變化范圍為5e-4~5.149e-4。符合實際參數變化范圍,且參數調整速度較快,數值波動較小,證明控制器能在通過自適應及時調整參數以適應系統需要。干擾觀測器估計擾動跟蹤誤差軌跡如圖9所示。
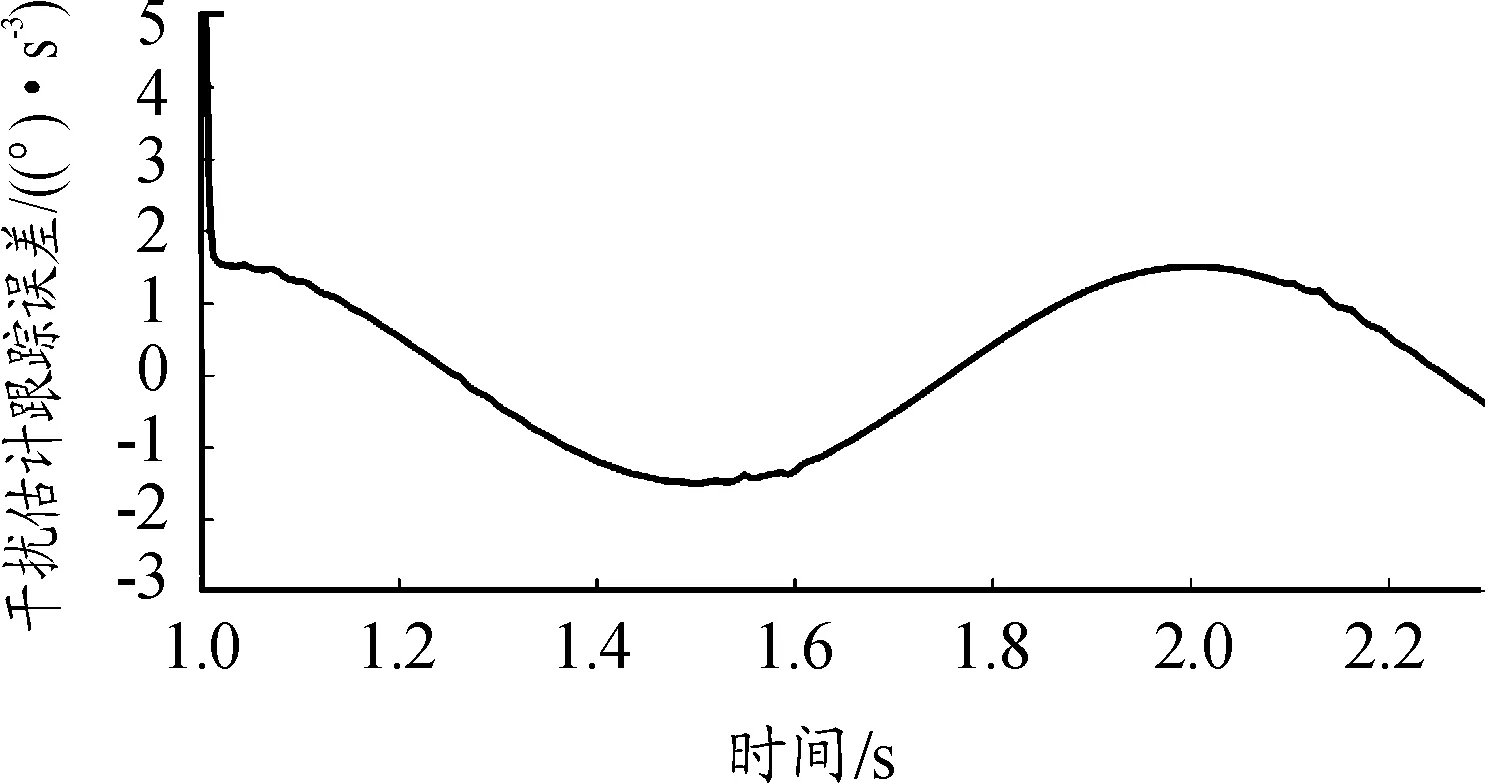
圖9 擾動觀測器干擾估計跟蹤誤差曲線
由圖9所示,所設計基于指數收斂的干擾觀測器能以較快速度在線估計擾動大小,約0.023 s就能準確的估計出實際干擾大小,并且在運動過程中擾動觀測器最大跟蹤誤差為1.512(°)/s3,整個運動過程中能準確估計出實際干擾,證明了該觀測器的可行性與高效性。
5 結論
1) 通過設計基于指數收斂的干擾觀測器對系統時變干擾進行在線監測,并在控制器中進行補償。仿真結果證明觀測器只需0.023 s就能準確監測實際干擾,在運動過程中擾動觀測器最大跟蹤誤差為1.512(°)/s3,滿足對觀測器的精度以及反應時間要求。
2) 利用自適應律估計狀態方程中不確定的參數,采用一種映射投影算法防止自適應參數估計值過大造成控制輸入信號過大,仿真證明A1、A2、A3的估計值均在正常范圍內波動,符合系統需求。
3) 設計的基于指數趨近的滑模控制器能使彈丸協調臂整個運動過程平穩,動態誤差小,到位精度高,證明了控制器的可行性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
