RTG大車自動(dòng)糾偏系統(tǒng)設(shè)計(jì)和糾偏策略
2021-04-30 21:22:22楊陽王寶磊韓佳琦
上海海事大學(xué)學(xué)報(bào) 2021年1期
關(guān)鍵詞:實(shí)驗(yàn)
楊陽 王寶磊 韓佳琦
摘要:
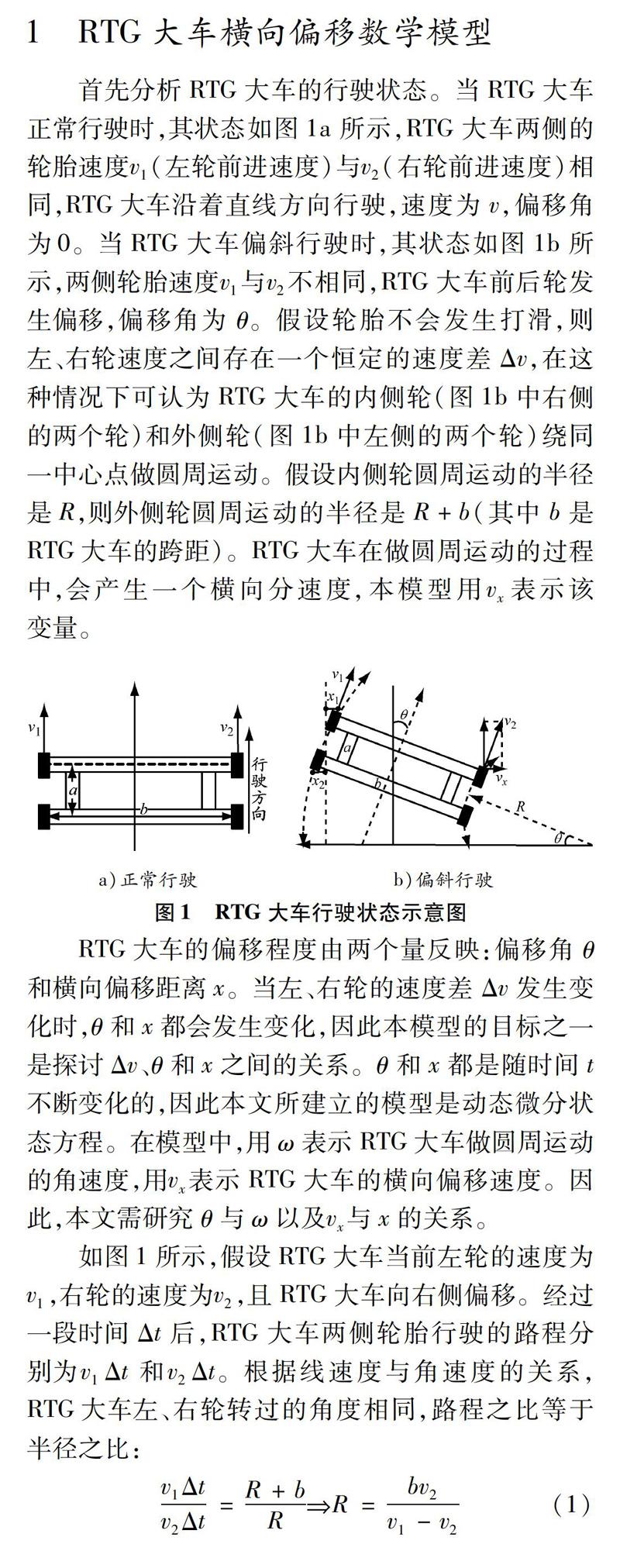
針對(duì)傳統(tǒng)集裝箱碼頭輪胎式龍門起重機(jī)(rubber-tyred gantry crane,RTG)大車在直線行駛過程中產(chǎn)生橫向偏移的問題,提出一種RTG大車速度差自動(dòng)糾偏方法。該方法通過磁尺傳感器采集RTG大車橫向偏移距離和偏移角,建立RTG大車橫向偏移數(shù)學(xué)模型。基于最優(yōu)控制理論構(gòu)建運(yùn)行性能指標(biāo)函數(shù),推導(dǎo)出最優(yōu)控制矩陣的黎卡提方程并采用線性二次型最優(yōu)控制方法求解。引入慣性、加減速、PLC延遲等干擾進(jìn)行Simulink仿真,得到最終解。在現(xiàn)場(chǎng)調(diào)試中,PLC根據(jù)該代數(shù)解完成RTG大車行駛自動(dòng)糾偏。研究結(jié)果表明:大車橫向偏移距離保持在30 mm內(nèi),實(shí)際運(yùn)行效果理想,達(dá)到RTG大車自動(dòng)糾偏目的。
關(guān)鍵詞:
輪胎式龍門起重機(jī)(RTG); 速度差自動(dòng)糾偏; 最優(yōu)控制理論; 黎卡提方程
中圖分類號(hào):? U653.921; TP27
文獻(xiàn)標(biāo)志碼:? A
收稿日期: 2019-11-11
修回日期: 2020-08-19
基金項(xiàng)目:
國(guó)家自然科學(xué)基金(71701126)
作者簡(jiǎn)介:
楊陽(1983—),女,上海人,講師,碩導(dǎo),博士,研究方向?yàn)槲锪鞴こ膛c管理, (E-mail)yyang@shmtu.edu.cn
Automatic deviation correction system design and
deviation correction strategy for RTG cart
YANG Yang, WANG Baolei, HAN Jiaqi
(Logistics Engineering College, Shanghai Maritime University, Shanghai 201306, China)
Abstract:
To solve the rubber-tyred gantry crane (RTG) cart transverse deviation problem in the straight-line driving, a method of automatic deviation correction for RTG cart velocity difference is proposed. Based on the data of transverse deviation displacement and deviation angle collected by the magnetic ruler sensor, the mathematical model of the RTG cart transverse deviation is established. The operational performance index function is constructed based on the optimal control theory, and the Riccati equation of the optimal control matrix is derived and solved by the linear quadratic optimal control method. The Simulink simulation is carried out to obtain the final solution, where the interference of inertia, acceleration, deceleration and PLC delay is introduced. In the field experiment, the PLC automatically corrected the RTG cart travelling deviation according to the algebraic solution. The results show the RTG cart transverse deviation displacement is kept within 30 mm, the actual operation effect is ideal, and the purpose of automatic deviation correction is achieved.
Key words:
rubber-tyred gantry crane (RTG); automatic deviation correction for velocity difference; optimal control theory; Riccati equation
0 引 言
輪胎式龍門起重機(jī)(rubber-tyred gantry crane, RTG)是目前國(guó)內(nèi)集裝箱碼頭堆場(chǎng)搬運(yùn)、裝卸、堆垛等作業(yè)的專用機(jī)械。相比于軌道式龍門起重機(jī)(rail-mounted gantry crane, RMG),RTG的機(jī)動(dòng)性較好、通用性較強(qiáng),可以進(jìn)行跨箱區(qū)作業(yè)。
由于RTG沒有軌道約束,偏斜行駛會(huì)產(chǎn)生剮箱、撞箱等問題,甚至造成嚴(yán)重的損失。
為實(shí)現(xiàn)碼頭自動(dòng)化轉(zhuǎn)型升級(jí),對(duì)RTG的自動(dòng)化改造的關(guān)鍵就是解決RTG大車自動(dòng)糾偏問題。本文對(duì)RTG進(jìn)行糾偏系統(tǒng)設(shè)計(jì)和糾偏策略研究。
針對(duì)起重機(jī)大車行駛的自動(dòng)糾偏改造,國(guó)內(nèi)學(xué)者提出了不同的技術(shù)方案:閆德鑫等[1]利用GPS定位計(jì)算當(dāng)前RTG大車的偏移距離,并根據(jù)偏移距離推算糾偏控制量,但是糾偏效果欠佳。圖像識(shí)別法[2]通過在RTG大車直線行進(jìn)方向上畫參考線,利用圖像識(shí)別器判定當(dāng)前大車是否跑偏,但該方法未考慮糾偏系統(tǒng)的干擾、延遲等因素,而且圖像處理易受天氣影響。激光糾偏法[3]以堆場(chǎng)上的集裝箱側(cè)面之間的距離作為參考,判定大車是否跑偏,但是該方法未公開其糾偏控制系統(tǒng)的設(shè)計(jì),無法判斷糾偏效果。超聲波法[4]利用超聲波傳感器測(cè)量RTG大車與參照物之間的距離,根據(jù)該測(cè)量距離與預(yù)設(shè)距離的比較結(jié)果發(fā)送不同的控制信號(hào),但該方法同樣未公開具體的糾偏控制系統(tǒng),無法比較其糾偏誤差范圍。王科等[5]采用電控羅經(jīng)與激光距離傳感器相結(jié)合的糾偏方法,建立了基于航向角和激光偏差值的糾偏模型來規(guī)避RTG大車輪胎壓力造成的影響,實(shí)現(xiàn)在RTG大車作業(yè)過程中對(duì)偏離方向的超前預(yù)測(cè),并增加偏差補(bǔ)償,將糾偏誤差控制在200 mm以內(nèi)。洪輝等[6]基于RTG大車輪胎的速度差,單方面調(diào)整海側(cè)或陸側(cè)大車行駛速度,也可以同時(shí)對(duì)不同側(cè)的大車進(jìn)行不同的處理提高糾偏效率。其中,GPS糾偏系統(tǒng)控制器負(fù)責(zé)糾偏方向和糾偏量的計(jì)算任務(wù),PLC和變頻器仍然負(fù)責(zé)邏輯判斷和數(shù)據(jù)傳輸。高強(qiáng)生等[7]認(rèn)為PLC在RTG大車糾偏控制環(huán)節(jié)既能計(jì)算偏移量,又能對(duì)大車行駛狀態(tài)進(jìn)行動(dòng)態(tài)實(shí)時(shí)調(diào)整。王吉明[8]考慮電氣系統(tǒng)的安全性、穩(wěn)定性和性價(jià)比,采用PLC實(shí)現(xiàn)了對(duì)造船龍門起重機(jī)的電氣系統(tǒng)的具體控制。
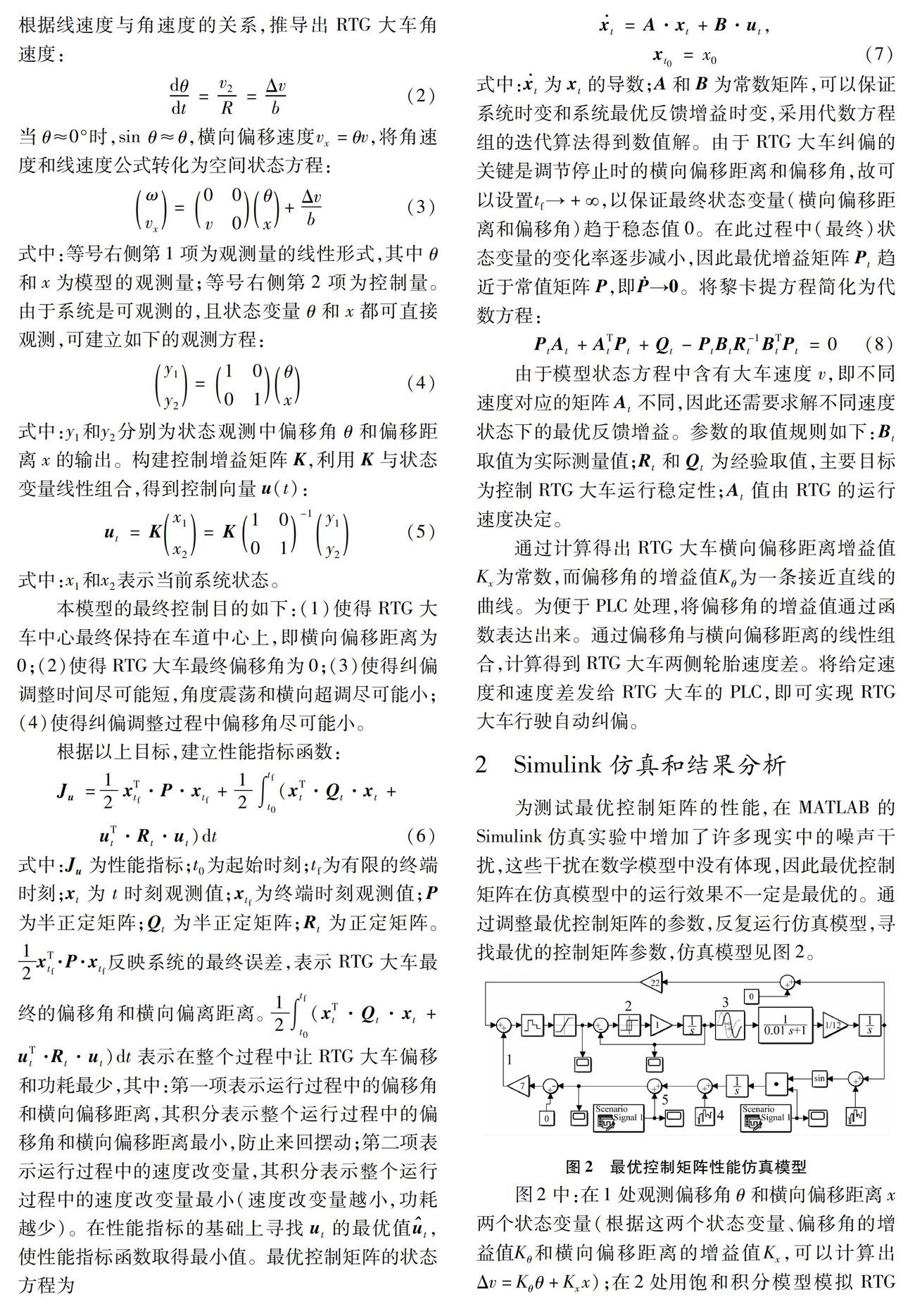
第二次RTG大車仿真實(shí)驗(yàn)設(shè)置:大車運(yùn)行速度為2 m/s,初始偏移角為0,初始橫向偏移距離為-0.1 m;大車的橫向偏
移距離x的增益值Kx=6.4,偏移角θ的增益值Kθ為6.282v+19.87。實(shí)驗(yàn)?zāi)繕?biāo)是將其調(diào)整到中心處。由圖4可知,在15s左右時(shí)糾偏完成,此后RTG大車的橫向偏移距離在-0.01m到0.01 m之間振蕩,這表明本模型可以對(duì)橫向偏移進(jìn)行糾正。
第三次仿真實(shí)驗(yàn)將RTG大車橫向偏移距離x的增益值Kx調(diào)整為3.2,其他參數(shù)與第二次仿真實(shí)驗(yàn)的相同,仿真運(yùn)行結(jié)果見圖5。
對(duì)比第二次與第三次仿真實(shí)驗(yàn):在第二次實(shí)驗(yàn)中RTG大車經(jīng)過15 s左右進(jìn)入穩(wěn)定狀態(tài);在第三次實(shí)驗(yàn)中RTG大車經(jīng)過30 s左右進(jìn)入穩(wěn)定狀態(tài),但第三
次實(shí)驗(yàn)中RTG大車橫向偏移距離的振蕩幅度比第二次實(shí)驗(yàn)的略低。這說明第二次仿真實(shí)驗(yàn)采用計(jì)算出的最優(yōu)增益矩陣并不能達(dá)到最優(yōu)目的。這是因?yàn)樽顑?yōu)增益矩陣是在理想的數(shù)學(xué)模型下求得的,而仿真模型中引入了大量的干擾,如慣性、加減速、PLC延遲等。通過調(diào)整最優(yōu)增益矩陣的值,可以減小振蕩幅度,但會(huì)引入延遲,因此在現(xiàn)場(chǎng)測(cè)試中可通過調(diào)整最優(yōu)增益矩陣使延遲時(shí)間和振蕩幅度都在可接受的范圍內(nèi)。
3 現(xiàn)場(chǎng)實(shí)驗(yàn)及分析
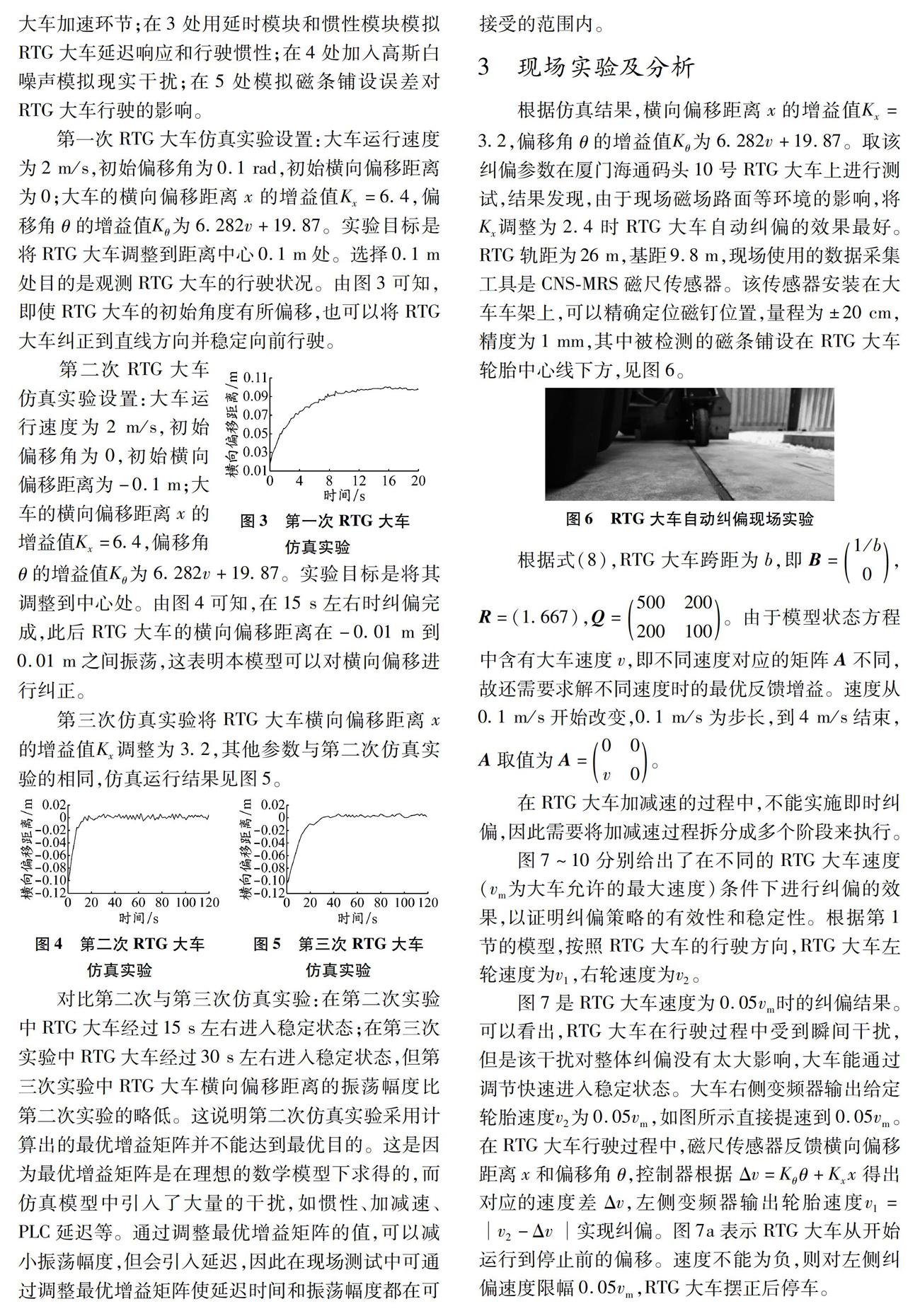
根據(jù)仿真結(jié)果,橫向偏移距離x的增益值Kx=3.2,偏移角θ的增益值Kθ為6.282v+19.87。取該糾偏參數(shù)在廈門海通碼頭10號(hào)RTG大車上進(jìn)行測(cè)試,結(jié)果發(fā)現(xiàn),由于現(xiàn)場(chǎng)磁場(chǎng)路面等環(huán)境的影響,將Kx調(diào)整為2.4時(shí)RTG大車自動(dòng)糾偏的效果最好。RTG軌距為26 m,基距9.8 m,現(xiàn)場(chǎng)使用的數(shù)據(jù)采集工具是CNS-MRS磁尺傳感器。該傳感器安裝在大車車架上,可以精確定位磁釘位置,量程為±20 cm,精度為1 mm,其中被檢測(cè)的磁條鋪設(shè)在RTG大車輪胎中心線下方,見圖6。
根據(jù)式(8),RTG大車跨距
為b,即
在RTG大車加減速的過程中,不能實(shí)施即時(shí)糾偏,因此需要將加減速過程拆分成多個(gè)階段來執(zhí)行。
圖7~10分別給出了在不同的RTG大車速度(vm為大車允許的最大速度)條件下進(jìn)行糾偏的效果,以證明糾偏策略的有效性和穩(wěn)定性。根據(jù)第1節(jié)的模型,按照RTG大車的行駛方向,RTG大車左輪速度為v1,右輪速度為v2。
圖7是RTG大車速度為0.05vm時(shí)的糾偏結(jié)果。可以看出,RTG大車在行駛過程中受到瞬間干擾,但是該干擾對(duì)整體糾偏沒有太大影響,大車能通過調(diào)節(jié)快速進(jìn)入穩(wěn)定狀態(tài)。大車右側(cè)變頻器輸出給定輪胎速度v2為0.05vm,如圖所示直接提速到0.05vm。在RTG大車行駛過程中,磁尺傳感器反饋橫向偏移距離x和偏移角θ,控制器根據(jù)Δv=Kθθ+Kxx得出對(duì)應(yīng)的速度差Δv,左側(cè)變頻器輸出輪胎速度v1=∣v2-Δv∣實(shí)現(xiàn)糾偏。圖7a表示RTG大車從開始運(yùn)行到停止前的偏移。速度不能為負(fù),則對(duì)左側(cè)糾偏速度限幅0.05vm,RTG大車擺正后停車。
圖8是RTG大車速度為0.5vm時(shí)的糾偏結(jié)果。圖8顯示,RTG大車能保證在位置偏移30 mm以內(nèi)穩(wěn)定運(yùn)行,而不再偏移過大。在RTG大車加減速過程中,將給定速度拆分為多階段給定,實(shí)現(xiàn)該過程RTG大車的糾偏控制。
圖9是RTG大車速度為0.7vm時(shí)的糾偏結(jié)果。圖10是RTG大車速度為vm時(shí)的糾偏結(jié)果。圖10為了測(cè)試大車急停的穩(wěn)定性,采用直接停車,最后RTG大車位置偏差在10 mm以內(nèi)。
分析上述幾次實(shí)驗(yàn)可知,智能糾偏策略對(duì)RTG大車運(yùn)行無速度要求,即只要速度在0.05vm~vm范圍內(nèi)都可實(shí)現(xiàn)穩(wěn)定糾偏。本糾偏策略對(duì)RTG大車行駛進(jìn)行全自動(dòng)糾偏,大車行駛糾偏有效,糾偏效果顯著,可以投入現(xiàn)場(chǎng)作業(yè)使用。進(jìn)入穩(wěn)態(tài)后,位置偏差在30 mm內(nèi)波動(dòng),大車中心位置在0位波動(dòng)。糾偏策略的特點(diǎn)有:進(jìn)入穩(wěn)定狀態(tài)后,
不會(huì)再有大角度偏移;只要RTG大車速度在0.05vm~vm范圍內(nèi)均能實(shí)現(xiàn)穩(wěn)定糾偏;抗干擾能力強(qiáng)。
4 結(jié) 論
針對(duì)輪胎式龍門起重機(jī)(RTG)在直線行駛過程中的偏移問題,采用磁尺傳感器對(duì)環(huán)境進(jìn)行檢測(cè),建立了RTG大車橫向偏移數(shù)學(xué)模型。該模型是關(guān)于橫向偏移距離和偏移角的線性微分空間狀態(tài)方程。提出一種利用最優(yōu)控制理論實(shí)現(xiàn)RTG大車自動(dòng)糾偏的方法,使得RTG大車能夠?qū)崿F(xiàn)自動(dòng)糾偏。
實(shí)驗(yàn)結(jié)果表明:本文所設(shè)計(jì)的糾偏控制系統(tǒng)運(yùn)行效果良好,可以將RTG大車控制到軌道中心線的位置,且位置偏移可以控制在30 mm以內(nèi),抗干擾能力強(qiáng)。本文提出的智能糾偏策略可以應(yīng)用于傳統(tǒng)碼頭的自動(dòng)化改造,既能減少碼頭改造成本,又能避免人工糾偏精度低的問題,提高RTG大車運(yùn)行的安全性。
參考文獻(xiàn):
[1]閆德鑫, 李俊, 潘金貴. GPS在輪胎吊自動(dòng)駕駛中的應(yīng)用[J]. 計(jì)算機(jī)工程與應(yīng)用, 2005, 41(33): 206-210. DOI: 10.3321/j.issn:1002-8331.2005.33.063.
[2]南通通鐳軟件有限公司, 上海冠東國(guó)際集裝箱碼頭有限公司. 集裝箱龍門吊位置圖像識(shí)別與定位糾偏系統(tǒng):? 201020106135.3[P]. 2011-06-29[2019-11-11].
[3]上海海鐳激光科技有限公司. 輪胎吊行走定位糾偏及防撞的系統(tǒng):? 201420312741.9[P]. 2014-12-10[2019-11-11].
[4]青島港(集團(tuán))有限公司. 一種輪胎式集裝箱龍門起重機(jī)的糾偏方法:? 200710015431.5[P]. 2007-09-19[2019-11-11].
[5]王科, 張福雷, 嚴(yán)彩忠, 等. 基于電控羅經(jīng)的輪胎式龍門起重機(jī)全自動(dòng)糾偏方法[J]. 工業(yè)控制計(jì)算機(jī), 2019, 32(1): 17-22.
[6]洪輝, 蔣旻. GPS技術(shù)在輪胎式龍門吊自動(dòng)糾偏中的應(yīng)用[J]. 集裝箱化, 2013, 24(2): 22-26.
[7]高強(qiáng)生, 王曼. 淺析PLC控制器在起重機(jī)自動(dòng)糾偏系統(tǒng)中的作用[J]. 數(shù)控技術(shù), 2016(10): 13-13. DOI: 10.19695/j.cnki.cn12-1369.2016.10.008.
[8]王吉明. 造船龍門起重機(jī)電氣控制系統(tǒng)的設(shè)計(jì)與應(yīng)用[D]. 上海: 華東理工大學(xué), 2011.
(編輯 賈裙平)
猜你喜歡
作文·小學(xué)低年級(jí)(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(jí)(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(jí)(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55