基于帶三參數(shù)的類四次貝塞爾曲線的起重機轉(zhuǎn)彎非圓軌道優(yōu)化
2021-04-30 20:51:25梁崗吳章杰於偉坤
上海海事大學(xué)學(xué)報 2021年1期
關(guān)鍵詞:優(yōu)化
梁崗 吳章杰 於偉坤
摘要:
為解決有軌起重機在轉(zhuǎn)彎時出現(xiàn)的啃軌、卡軌問題,提出基于貝塞爾曲線的起重機非圓軌道設(shè)計方案。方案選用帶三參數(shù)的類四次貝塞爾曲線作為轉(zhuǎn)彎內(nèi)軌曲線,針對起重機單輪和多輪情況,通過起重機大車行走機構(gòu)的幾何關(guān)系計算出外側(cè)前、后點的軌跡。以大車外側(cè)前、后點偏差量最小為優(yōu)化目標,利用多始點啟發(fā)式全局優(yōu)化算法搜尋最優(yōu)的曲線參數(shù),并通過Hermite插值法擬合出外軌曲線。計算結(jié)果表明,與傳統(tǒng)圓弧轉(zhuǎn)彎軌道相比,以四次貝塞爾曲線作為轉(zhuǎn)彎軌道曲線時起重機在轉(zhuǎn)彎時外側(cè)前、后點最大偏差量明顯減小。以帶三參數(shù)的類四次貝塞爾曲線作為內(nèi)軌曲線時,可通過改變?nèi)齾?shù)數(shù)值來調(diào)整曲線,從而進一步降低偏差量。
關(guān)鍵詞:
有軌起重機; 貝塞爾曲線; 偏差量; 全局優(yōu)化算法
中圖分類號:? U653.921
文獻標志碼:? A
收稿日期: 2019-11-21
修回日期: 2020-04-18
作者簡介:
梁崗(1969—),男,河南開封人,副教授,博士,研究方向為起重機動力學(xué)、起重機智能結(jié)構(gòu)振動控制、大型起重機結(jié)構(gòu)輕量化設(shè)計與優(yōu)化、起重機電氣控制仿真和虛擬樣機仿真,(E-mail)gangliang@shmtu.edu.cn
Optimization of non-circular rail for crane turning based on
quasi quartic Bezier curve with three parameters
LIANG Gang1, WU Zhangjie1, YU Weikun2
(1. Logistics Engineering College, Shanghai Maritime University, Shanghai 201306, China;
2. Shanghai Zhenhua Heavy Industry Co., Ltd., Shanghai 200125, China)
Abstract:
In order to solve the problems that the rail crane gnaws on the rail and is jammed in the rail during turning, a non-circular rail design scheme of the crane based on Bezier curve is proposed. In the scheme, the quasi quartic Bezier curve with three parameters is chosen as the turning curve of the inner rail. According to the single wheel and multi-wheel situation of the crane, the tracks of the front and rear points on the outer side are calculated through the geometric relationship of the traveling mechanism of the crane cart. Taking the minimum deviation of the front and rear points on the outside of the cart as the optimization objective, the optimal parameters of the curve are searched by the multi-start point heuristic global optimization algorithm, and the outer rail curve is fitted by Hermite interpolation. The calculation results show that, the maximum deviation of the front and rear points on the outside of the cart decreases significantly when the quartic Bezier curve is used as the turning rail curve compared with the traditional circular turning rail. When the quasi quartic Bezier curve with three parameters is used as the inner rail curve, the deviation can be further reduced by adjusting the three parameters.
Key words:
rail crane; Bezier curve; deviation; global optimization algorithm
0 引 言
為實現(xiàn)一臺岸邊集裝箱起重機(簡稱岸橋)對多個非線性分布泊位的移動作業(yè),需要岸橋能夠轉(zhuǎn)彎運行。然而,有軌運行式起重機大車前后輪在轉(zhuǎn)彎過程中的軌跡存在偏移量。小的偏移量能夠被輪緣與軌道之間的間隙抵消,但偏移量過大會造成大車輪緣啃軌、卡軌等危險情況,因此偏移量的大小是起重機能否順利過彎的關(guān)鍵影響因素。
傳統(tǒng)的起重機大車轉(zhuǎn)彎軌道的設(shè)計研究都是基于同心圓軌道的,采用調(diào)整整機框架尺寸和車輪踏面寬度等參數(shù)或增加偏心軸承等方法[1-5]幫助大車順利過彎,這使得軌道轉(zhuǎn)彎半徑過大且需要額外增加相關(guān)的運動控制機構(gòu),增加了設(shè)計難度和制造成本。雖然直軌道和同心圓軌道在接點處的函數(shù)及其一階導(dǎo)數(shù)均連續(xù),但其二階導(dǎo)數(shù)的不連續(xù)使得接點處的偏移量陡增,因此轉(zhuǎn)彎軌道曲線必須具有二階導(dǎo)數(shù)連續(xù)性(也即曲線曲率半徑連續(xù))以滿足起重機平緩過渡的要求。直線的曲率半徑為無窮大,而圓弧的曲率半徑為一定值,在兩者之間引入一條過渡曲線[6-8]可以滿足曲率半徑的連續(xù)變化。
近年來起重機制造業(yè)出現(xiàn)一種新型的起重機轉(zhuǎn)彎方案,稱之為修正軌道方案。修正軌道的彎道不是簡單的圓弧。CHEN等[9]利用回旋曲線作為過渡曲線設(shè)計了完整的非圓轉(zhuǎn)彎軌道,并研究了回旋曲線非圓軌道的多輪修正原理。
貝塞爾曲線可以與直線段光滑過渡,且通過調(diào)整控制點參數(shù)可以改變其連續(xù)性。黃玉釧[10]和陳成等[11]因貝塞爾曲線具有良好的幾何連續(xù)性和可控性將其運用于軌跡規(guī)劃研究中。此外,通過引入各種帶參數(shù)的Bernstein基函數(shù)能夠使貝塞爾曲線在不改變控制點位置的情況下進行局部調(diào)整。韓旭里等[12]在基函數(shù)中引入形狀參數(shù)對二次貝塞爾曲線進行擴展,通過改變參數(shù)大小調(diào)整曲線接近控制多邊形的程度;在三次貝塞爾曲線基函數(shù)擴展中,杭后俊等[13]引入雙參數(shù)使得曲線具有更靈活的形狀可調(diào)性;文獻[14-17]對四次貝塞爾曲線的擴展也進行了相應(yīng)的研究,分別引入單、雙、三參數(shù)使得構(gòu)造的新曲線具有與四次貝塞爾曲線類似的特性,并且給調(diào)整曲線的形狀提供了更豐富的手段。
根據(jù)起重機大車非圓轉(zhuǎn)彎軌道的特點,本文將帶三參數(shù)的類四次貝塞爾曲線軌跡規(guī)劃方法引入起重機大車轉(zhuǎn)彎軌道設(shè)計中。以大車外側(cè)前、后點偏差量(前、后點軌跡在局部坐標系縱軸的最大差值)為目標函數(shù),采用全局優(yōu)化算法[18-19]對多個參數(shù)進行優(yōu)化形成貝塞爾曲線內(nèi)軌。由內(nèi)側(cè)車輪坐標參數(shù)方程和起重機大車相關(guān)參數(shù)通過剛體運動關(guān)聯(lián)性直接推導(dǎo)出外側(cè)前、后點軌跡參數(shù)方程,再依據(jù)最小二乘法等確定修正后的外軌曲線的各坐標點。為保證計算所得曲線的光滑性,需對計算所得離散點進行光滑處理,利用Hermite插值法形成最優(yōu)外軌曲線軌道。對起重機大車單輪和多輪情況的非圓軌道進行優(yōu)化計算和比較分析,為起重機大車轉(zhuǎn)彎非圓軌道的設(shè)計研究提供借鑒。
1 軌道優(yōu)化原則
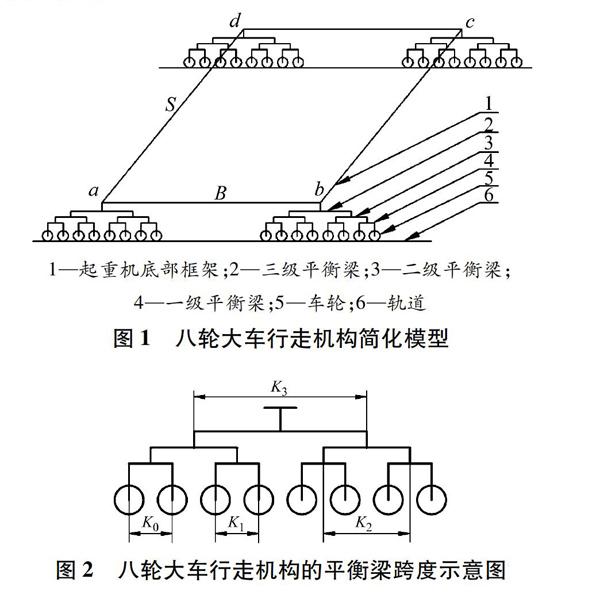
現(xiàn)有的起重機大車一般采用四點支座式結(jié)構(gòu),車輪多采用雙輪緣圓柱形車輪。圖1為八輪大車行走機構(gòu)簡化模型,其中:B為起重機基距;S為軌距。圖2為八輪大車行走機構(gòu)的平衡梁跨度示意圖,其中:K0為輪距;K1、K2、K3分別為一級、二級、三級平衡梁跨度。
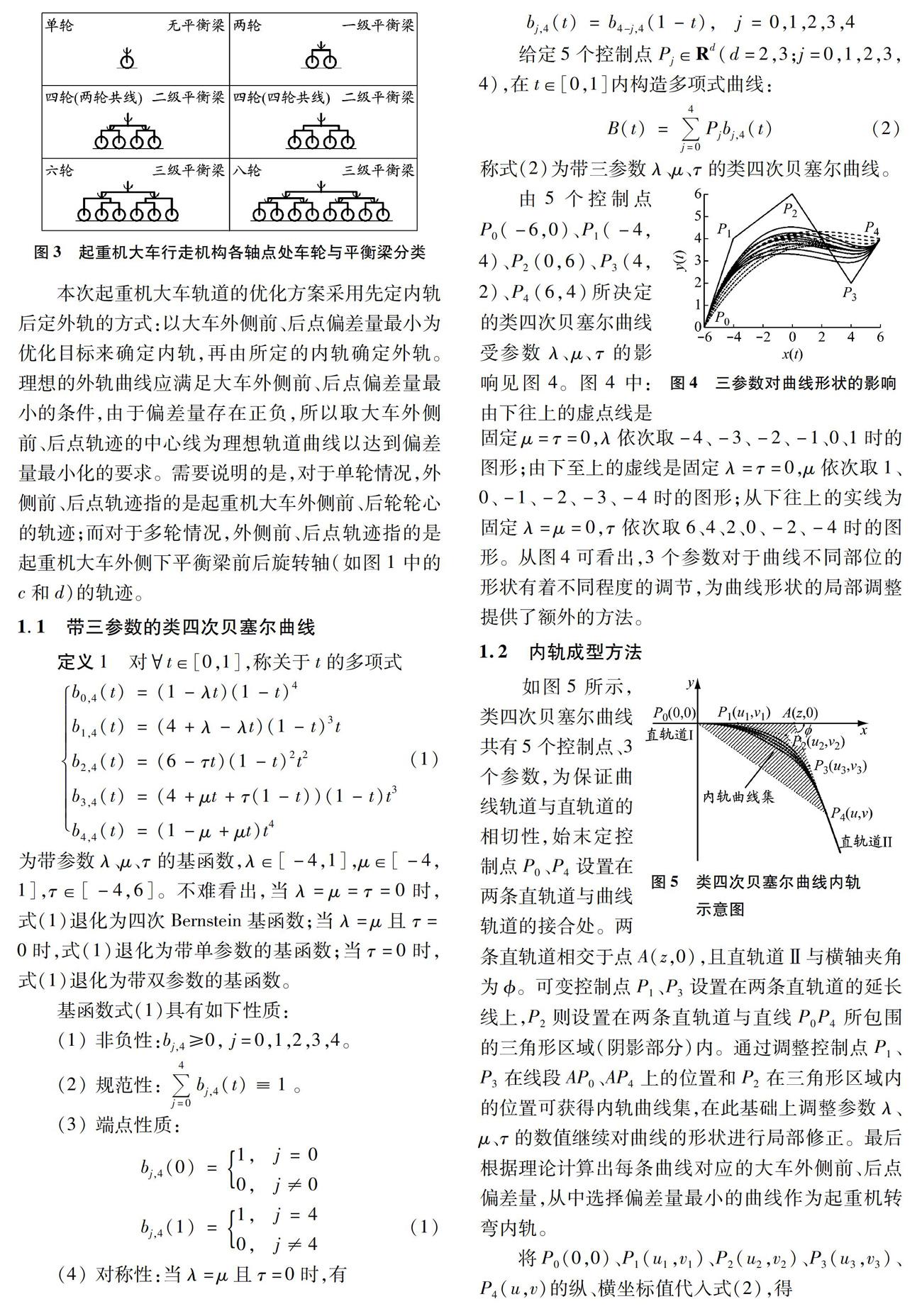
不同的起重機大車每個支點上的平衡梁級數(shù)和車輪數(shù)可能不同,基本模型與圖1相似。幾種不同的起重機大車行走機構(gòu)模型見圖3。
本次起重機大車軌道的優(yōu)化方案采用先定內(nèi)軌后定外軌的方式:以大車外側(cè)前、后點偏差量最小為優(yōu)化目標來確定內(nèi)軌,再由所定的內(nèi)軌確定外軌。理想的外軌曲線應(yīng)滿足大車外側(cè)前、后點偏差量最小的條件,由于偏差量存在正負,所以取大車外側(cè)前、后點軌跡的中心線為理想軌道曲線以達到偏差量最小化的要求。需要說明的是,對于單輪情況,外側(cè)前、后點軌跡指的是起重機大車外側(cè)前、后輪輪心的軌跡;而對于多輪情況,外側(cè)前、后點軌跡指的是起重機大車外側(cè)下平衡梁前后旋轉(zhuǎn)軸(如圖1中的c和d)的軌跡。
1.1 帶三參數(shù)的類四次貝塞爾曲線
定義1 對t∈[0,1],稱關(guān)于t的多項式
b0,4(t)=(1-λt)(1-t)4
b1,4(t)=(4+λ-λt)(1-t)3t
b2,4(t)=(6-τt)(1-t)2t2
b3,4(t)=(4+μt+τ(1-t))(1-t)t3
b4,4(t)=(1-μ+μt)t4
(1)
為帶參數(shù)λ、μ、τ的基函數(shù),λ∈[-4,1],μ∈[-4,1],τ∈[-4,6]。不難看出,當(dāng)λ=μ=τ=0時,式(1)退化為四次Bernstein基函數(shù);當(dāng)λ=μ且τ=0時,式(1)退化為帶單參數(shù)的基函數(shù);當(dāng)τ=0時,式(1)退化為帶雙參數(shù)的基函數(shù)。
基函數(shù)式(1)具有如下性質(zhì):
(1) 非負性:bj,4≥0, j=0,1,2,3,4。
(2) 規(guī)范性:4j=0bj,4(t)≡1。
(3) 端點性質(zhì):
稱式(2)為帶三參數(shù)λ、μ、τ的類四次貝塞爾曲線。
由5個控制點P0(-6,0)、P1(-4,4)、P2(0,6)、P3(4,2)、P4(6,4)所決定的類四次貝塞爾曲線受參數(shù)λ、μ、τ的影響見圖4。圖4中:由下往上的虛點線是固定μ=τ=0,λ依次取-4、-3、-2、-1、0、1時的圖形;由下至上的虛線是固定λ=τ=0,μ依次取1、0、-1、-2、-3、-4時的圖形;從下往上的實線為固定λ=μ=0,τ依次取6、4、2、0、-2、-4時的圖形。從圖4可看出,3個參數(shù)對于曲線不同部位的形狀有著不同程度的調(diào)節(jié),為曲線形狀的局部調(diào)整提供了額外的方法。
1.2 內(nèi)軌成型方法
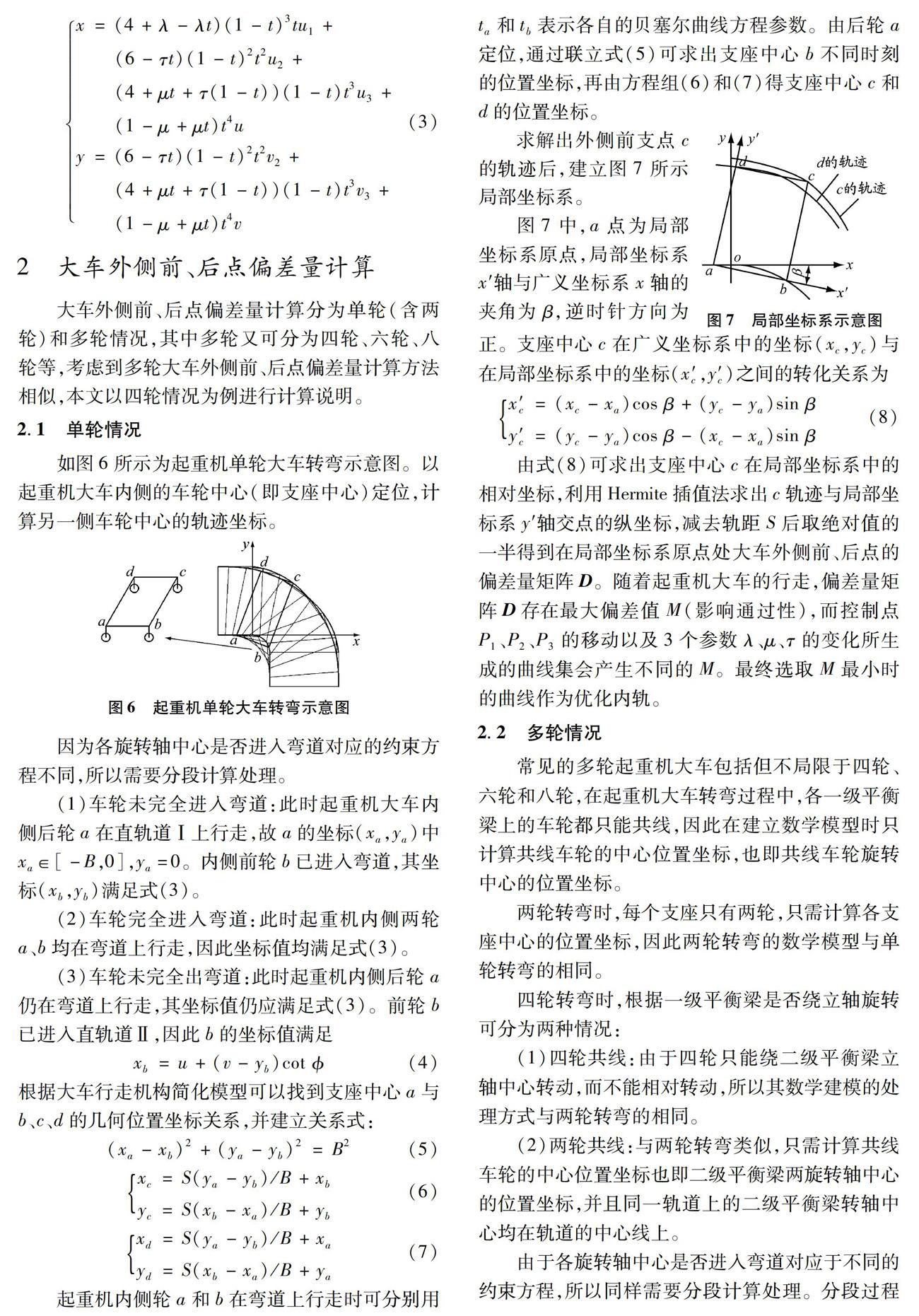
如圖5所示,類四次貝塞爾曲線共有5個控制點、3個參數(shù),為保證曲線軌道與直軌道的相切性,始末定控制點P0、P4設(shè)置在兩條直軌道與曲線軌道的接合處。兩條直軌道相交于點A(z,0),且直軌道Ⅱ與橫軸夾角為。可變控制點P1、P3設(shè)置在兩條直軌道的延長線上,P2則設(shè)置在兩條直軌道與直線P0P4所包圍的三角形區(qū)域(陰影部分)內(nèi)。通過調(diào)整控制點P1、P3在線段AP0、AP4上的位置和P2在三角形區(qū)域內(nèi)的位置可獲得內(nèi)軌曲線集,在此基礎(chǔ)上調(diào)整參數(shù)λ、μ、τ的數(shù)值繼續(xù)對曲線的形狀進行局部修正。最后根據(jù)理論計算出每條曲線對應(yīng)的大車外側(cè)前、后點偏差量,從中選擇偏差量最小的曲線作為起重機轉(zhuǎn)彎內(nèi)軌。
將P0(0,0)、P1(u1,v1)、P2(u2,v2)、P3(u3,v3)、P4(u,v)的縱、橫坐標值代入式(2),得
2 大車外側(cè)前、后點偏差量計算
大車外側(cè)前、后點偏差量計算分為單輪(含兩輪)和多輪情況,其中多輪又可分為四輪、六輪、八輪等,考慮到多輪大車外側(cè)前、后點偏差量計算方法相似,本文以四輪情況為例進行計算說明。
2.1 單輪情況
如圖6所示為起重機單輪大車轉(zhuǎn)彎示意圖。以起重機大車內(nèi)側(cè)的車輪中心(即支座中心)定位,計算另一側(cè)車輪中心的軌跡坐標。
因為各旋轉(zhuǎn)軸中心是否進入彎道對應(yīng)的約束方程不同,所以需要分段計算處理。
(1)車輪未完全進入彎道:此時起重機大車內(nèi)側(cè)后輪a在直軌道Ⅰ上行走,故a的坐標(xa,ya)中xa∈[-B,0],ya=0。內(nèi)側(cè)前輪b已進入彎道,其坐標(xb,yb)滿足式(3)。
(2)車輪完全進入彎道:此時起重機內(nèi)側(cè)兩輪a、b均在彎道上行走,因此坐標值均滿足式(3)。
(3)車輪未完全出彎道:此時起重機內(nèi)側(cè)后輪a仍在彎道上行走,其坐標值仍應(yīng)滿足式(3)。前輪b已進入直軌道Ⅱ,因此b的坐標值滿足
根據(jù)大車行走機構(gòu)簡化模型可以找到支座中心a與b、c、d的幾何位置坐標關(guān)系,并建立關(guān)系式:
起重機內(nèi)側(cè)輪a和b在彎道上行走時可分別用
ta和tb表示各自的貝塞爾曲線方程參數(shù)。由后輪a定位,通過聯(lián)立式(5)可求出支座中心b不同時刻的位置坐標,再由方程組(6)和(7)得支座中心c和d的位置坐標。
求解出外側(cè)前支點c的軌跡后,建立圖7所示局部坐標系。
圖7中,a點為局部坐標系原點,局部坐標系x′軸與廣義坐標系x軸的夾角為β,逆時針方向為正。支座中心c在廣義坐標系中的坐標(xc,yc)與在局部坐標系中的坐標(x′c,y′c)之間的轉(zhuǎn)化關(guān)系為
由式(8)可求出支座中心c在局部坐標系中的相對坐標,利用Hermite插值法求出c軌跡與局部坐標系y′軸交點的縱坐標,減去軌距S后取絕對值的一半得到在局部坐標系原點處大車外側(cè)前、后點的偏差量矩陣D。隨著起重機大車的行走,偏差量矩陣D存在最大偏差值M(影響通過性),而控制點P1、P2、P3的移動以及3個參數(shù)λ、μ、τ的變化所生成的曲線集會產(chǎn)生不同的M。最終選取M最小時的曲線作為優(yōu)化內(nèi)軌。
2.2 多輪情況
常見的多輪起重機大車包括但不局限于四輪、六輪和八輪,在起重機大車轉(zhuǎn)彎過程中,各一級平衡梁上的車輪都只能共線,因此在建立數(shù)學(xué)模型時只計算共線車輪的中心位置坐標,也即共線車輪旋轉(zhuǎn)中心的位置坐標。
兩輪轉(zhuǎn)彎時,每個支座只有兩輪,只需計算各支座中心的位置坐標,因此兩輪轉(zhuǎn)彎的數(shù)學(xué)模型與單輪轉(zhuǎn)彎的相同。
四輪轉(zhuǎn)彎時,根據(jù)一級平衡梁是否繞立軸旋轉(zhuǎn)可分為兩種情況:
(1)四輪共線:由于四輪只能繞二級平衡梁立軸中心轉(zhuǎn)動,而不能相對轉(zhuǎn)動,所以其數(shù)學(xué)建模的處理方式與兩輪轉(zhuǎn)彎的相同。
(2)兩輪共線:與兩輪轉(zhuǎn)彎類似,只需計算共線車輪的中心位置坐標也即二級平衡梁兩旋轉(zhuǎn)軸中心的位置坐標,并且同一軌道上的二級平衡梁轉(zhuǎn)軸中心均在軌道的中心線上。
由于各旋轉(zhuǎn)軸中心是否進入彎道對應(yīng)于不同的約束方程,所以同樣需要分段計算處理。分段過程與單輪大車轉(zhuǎn)彎類似,共分7種情況:(1)b2已進入彎道至b1剛進彎道;(2)b1已進入彎道至a2剛進彎道;(3)a2已進入彎道至a1剛進彎道;(4)a1完全進入彎道至b2剛出彎道;(5)b2已出彎道至b1剛出彎道;(6)b1已出彎道至a2剛出彎道;(7)a2已出彎道至a1剛好完全出彎道。
此處選取第3種情況(見圖8)加以詳細表述,其余情況處理方法類似,不再贅述。
當(dāng)旋轉(zhuǎn)軸中心a2、b1、b2均處于彎道上時,其橫、縱坐標xa2、ya2、xb1、yb1、xb2、yb2的約束條件均滿足式(3),此時3個未知數(shù)ta2、tb1、tb2分別對應(yīng)旋轉(zhuǎn)軸中心a2、b1、b2的貝塞爾曲線參數(shù)方程的參數(shù)。
再根據(jù)起重機四輪大車機構(gòu)的幾何關(guān)系建立內(nèi)側(cè)各旋轉(zhuǎn)中心的坐標方程組:
式中:β、γ、θ分別為內(nèi)側(cè)下平衡梁ab、二級平衡梁b1b2、二級平衡梁a1a2與x軸正方向的夾角,逆時針方向為正。
以旋轉(zhuǎn)軸中心a1定位,將式(9)與a2、b1、b2的橫、縱坐標約束方程聯(lián)立,其中包含β、γ、θ、ta2、tb1、tb2等6個未知參數(shù),與聯(lián)立方程組所包含的獨立方程個數(shù)相同,故由此可求出內(nèi)側(cè)支座中心軌跡坐標。外側(cè)下平衡梁前后支座中心c、d軌跡坐標以及大車外側(cè)前、后點偏差量的計算與單輪一致。
六輪和八輪大車行走機構(gòu)轉(zhuǎn)彎的理論方法和情況討論與單輪和四輪類似,此處不再贅述。具體的計算流程見圖9。
3 基于全局優(yōu)化算法的內(nèi)軌優(yōu)化計算
港口起重機大車非圓軌道通常根據(jù)港口岸邊的自然條件作對稱化設(shè)計,其在圖5中的具體表現(xiàn)為:兩個直軌道所在的直線相交于固定點A,以A點為圓心根據(jù)安裝場地的實際面積、綜合考慮非圓內(nèi)軌的占地情況選取合理的轉(zhuǎn)彎半徑作圓,與直
軌道Ⅰ和直軌道Ⅱ所在的直線分別相交于控制點P0、P4,因此陰影區(qū)域的ΔP0AP4是等腰三角形。至此,控制點P1、P2、P3位置的變化和參數(shù)λ、μ、τ決定內(nèi)軌的成型,從而影響優(yōu)化目標M的取值大小。
總體而言,起重機在非圓內(nèi)軌上轉(zhuǎn)彎的優(yōu)化問題可表示為
從圖5可以看出,控制點P1、P3在線段AP0、AP4上隨機移動,鑒于內(nèi)軌的對稱性設(shè)計可判定P2點的最佳運動軌跡在A點與P0P4中點的連線上。因此,可建立以下關(guān)系:
內(nèi)軌全局優(yōu)化問題可進一步簡化為
綜上所述,內(nèi)軌優(yōu)化問題的目標函數(shù)是不連續(xù)、不可微、高度非線性的,不僅變量和約束條件多,而且沒有明確的解析表達式,因此經(jīng)典的局部優(yōu)化方法并不適用。盡管局部優(yōu)化算法遠比全局優(yōu)化算法成熟、通用且易于實現(xiàn),但搜索過程完全依賴鄰域函數(shù)和初始點的選取,因此結(jié)果通常為局部極小值,從而無法實現(xiàn)全局最優(yōu)。
目前國內(nèi)外發(fā)展的全局優(yōu)化算法一般分為確定型和隨機型。本文采用結(jié)合MATLAB工具箱的GlobalSearch全局優(yōu)化算法,其基本原理是:首先全局搜索求解器生成基于分散搜索的若干起始試驗點,利用這些初始點調(diào)用局部求解器fmincon,通過SQP(序列二次規(guī)劃算法)不斷地判別、迭代,尋找出各自所在盆地的極值點,并刪除成功希望渺茫的起點。接著利用評價函數(shù)對比各盆地的極值點,最后搜索得到全局最優(yōu)值。多次試驗證明,利用GlobalSearch全局優(yōu)化算法不僅能得到更加精確穩(wěn)定可靠的M值,而且在程序運算時間上較其他全局優(yōu)化算法縮減很多。
4 實例計算分析
目前起重機大車的基本參數(shù)尚無國際標準,各國、各地區(qū)甚至各碼頭在實際工程中會依據(jù)不同的要求自行設(shè)計確定,但世界各國、各地區(qū)已經(jīng)形成一些岸橋基本參數(shù)系列(如軌距、基距等)。結(jié)合工程實際,根據(jù)當(dāng)前的岸橋參數(shù)范圍,選出如下岸橋和軌道數(shù)據(jù):軌道夾角的范圍70°~90°;軌距S的范圍20~35 m;基距B的范圍10~15 m;輪距K0=1 m;圓弧內(nèi)軌半徑R的范圍120~150 m。
4.1 單、多輪情況軌道優(yōu)化的對比分析
根據(jù)前文建立的起重機大車轉(zhuǎn)彎模型,選取軌道夾角=90°、軌距S=30 m、基距B=15 m、輪距K0=1 m、圓弧內(nèi)軌半徑R=120 m,并通過全局優(yōu)化算法的搜尋計算,得到表1。
通過表1的數(shù)據(jù)不難看出,不論起重機大車的類型如何,最終優(yōu)化返回的參數(shù)和偏差量十分接近。此外,盡管P1、P3點在AP0、AP4上隨機移動,但是兩點的最優(yōu)位置基本關(guān)于中位線對稱,這也印證了P2點的最佳運動軌跡在A點與P0P4中點的連線上。從圖10可以發(fā)現(xiàn),單輪與多輪情況生成的內(nèi)、外軌曲線和外側(cè)前、后點偏差量基本一致。為便于對比圓弧軌道、四次貝塞爾曲線軌道和帶三參數(shù)的類四次貝塞爾曲線軌道,以下選取單輪起重機大車為主要研究對象。
4.2 圓弧軌道和非圓曲線軌道的對比分析
在相同的大車轉(zhuǎn)彎系統(tǒng)參數(shù)下,圓弧軌道、四次貝塞爾曲線軌道和類四次貝塞爾曲線軌道的內(nèi)、外軌曲線和大車外側(cè)前、后點偏差量對比見圖11。
當(dāng)起重機大車在圓弧軌道上運行時,在剛進彎道時外側(cè)前、后點最大的偏差量為22.49 mm,完全進入彎道后的偏差量為零(前后軌跡重合,不出現(xiàn)偏移問題),在出彎道時再次產(chǎn)生較大的偏差量。
以貝塞爾曲線作內(nèi)軌時偏差量均不會超過4.70 mm,大車外側(cè)前、后點最大偏差量M相較于圓弧曲線對應(yīng)的最大偏差量都小很多。起重機大車在非圓軌道上運行時外側(cè)前、后點偏差量較小且平順,尤其避免了大車進彎道、出彎道時偏差量陡增的情況,進而極大降低車輪剛?cè)霃澋篮统鰪澋罆r發(fā)生啃軌、卡軌現(xiàn)象的概率,突出貝塞爾曲線作為轉(zhuǎn)彎內(nèi)軌曲線時的優(yōu)勢。
進一步觀察圖11可以發(fā)現(xiàn),分別以四次貝塞爾曲線和帶三參數(shù)的類四次貝塞爾曲線作內(nèi)軌曲線時的內(nèi)、外軌跡幾乎相同,僅在局部位置有少許調(diào)整,但是大車外側(cè)前、后點偏差量有著明顯的區(qū)別。類四次貝塞爾曲線作內(nèi)軌曲線時的最大偏差量為4.36 mm,不僅比四次貝塞爾曲線作內(nèi)軌曲線時的最大偏差4.68 mm小,而且偏差量整體的變化趨勢更加平穩(wěn)。選用該內(nèi)軌既可保證大車外側(cè)前、后輪的循跡性,又能在避免和消除啃軌、卡軌隱患上取得更好的效果。
5 結(jié) 論
(1)在起重機大車沿著軌道轉(zhuǎn)彎的過程中,外(內(nèi))側(cè)前、后點的偏差量是影響通過性的重要因素。本文首先引入四次貝塞爾曲線設(shè)計不同類型起重機大車的非圓內(nèi)軌,利用全局優(yōu)化算法搜尋最佳的控制點位置參數(shù)。與傳統(tǒng)的圓弧內(nèi)軌對比表明,在起重機大車進彎道和出彎道過程中以圓弧為內(nèi)軌曲線產(chǎn)生數(shù)倍于以四次貝塞爾曲線作內(nèi)軌曲線時的偏差量,因此基于貝塞爾曲線的軌道優(yōu)化方案能夠降低起重機大車轉(zhuǎn)彎時車輪發(fā)生啃軌、卡軌的概率。
(2)除控制點的位置影響四次貝塞爾曲線的形狀外,對Bernstein基函數(shù)引入3個形狀參數(shù)也能對曲線形狀進行調(diào)整,通過改變3個參數(shù)值可以對內(nèi)側(cè)的軌道進行微調(diào)。結(jié)果顯示,以帶三參數(shù)的類四次貝塞爾曲線作為內(nèi)軌曲線時不僅在四次貝塞爾曲線基礎(chǔ)上進一步降低了最大偏差量,而且使得大車外側(cè)前、后點偏差量趨于穩(wěn)定,保證了起重機大車在行走過程中外側(cè)前、后輪的循跡性。
參考文獻:
[1]顧樹澤. 水電站門式起重機運行機構(gòu)的拐彎設(shè)計[J]. 起重運輸機械, 1977(6): 33-38.
[2]倪慶興. 有軌運行式起重機的轉(zhuǎn)彎問題[J]. 起重運輸機械, 1980(3): 68-78.
[3]徐國靈. 起重機轉(zhuǎn)彎問題的探討[J]. 建筑機械, 1995(7): 8-12.
[4]張質(zhì)文, 虞和謙, 王金諾, 等. 起重機設(shè)計手冊[M]. 北京: 中國鐵道出版社, 1997: 116-117.
[5]王文濤. 大型有軌起重機的轉(zhuǎn)彎設(shè)計[J]. 中國工程機械學(xué)報, 2008, 6(2): 210-213. DOI: 10.15999/j.cnki.311926.2008.02.013.
[6]高暉. 過渡曲線的設(shè)計與應(yīng)用[D]. 杭州: 浙江工業(yè)大學(xué), 2015.
[7]王浩. 多種緩和曲線線型通用計算模型的編程實現(xiàn)[C]//中國土木工程學(xué)會, 上海土木工程學(xué)會, 上海隧道工程股份有限公司. 地下交通工程與工程安全:第五屆中國國際隧道工程研討會. 上海: 同濟大學(xué)出版社, 2011: 996-1002.
[8]徐衛(wèi)國, 龍振華, 余周武. 不同緩和曲線坐標計算方法[J]. 黑龍江工程學(xué)院學(xué)報(自然科學(xué)版), 2013, 27(3): 20-23. DOI: 10.19352/j.cnki.issn1671-4679.2013.03.006.
[9]CHENJialiang, DONG Dashan, QIAO Zhen. Non-circular crane rail theory and parametric design[J]. Mathematical Modeling of Engineering Problems, 2017, 4(1): 48-52.
[10]黃玉釧. 有理貝塞爾曲線在機器人軌跡規(guī)劃中的應(yīng)用[J]. 可編程控制器與工廠自動化, 2015(6): 53-57.
[11]陳成, 何玉慶, 卜春光, 等. 基于四階貝塞爾曲線的無人車可行軌跡規(guī)劃[J]. 自動化學(xué)報, 2015, 41(3): 486-496. DOI: 10.16383/j.aas.2015.c140295.
[12]韓旭里, 劉圣軍. 二次Bezier曲線的擴展[J]. 中南工業(yè)大學(xué)學(xué)報(自然科學(xué)版), 2003, 34(2): 214-217.
[13]杭后俊, 余靜, 李汪根. 三次Bezier曲線的一種雙參數(shù)擴展及應(yīng)用[J]. 計算機工程與應(yīng)用, 2010, 46(31): 178-180, 205.
[14]吳曉勤, 韓旭里, 羅善明. 四次Bezier曲線的兩種不同擴展[J]. 工程圖學(xué)學(xué)報, 2006(5): 59-64.
[15]劉小瓊, 楊國英. 帶兩個形狀參數(shù)的四次Bezier曲線的擴展[J]. 圖學(xué)學(xué)報, 2013, 34(1): 41-45.
[16]仇茹, 杭后俊, 潘俊超. 帶三參數(shù)的類四次Bezier曲線及其應(yīng)用研究[J]. 計算機工程與應(yīng)用, 2014, 50(20): 158-162.
[17]張貴倉, 趙菲, 葸海英. 帶3個形狀參數(shù)的四次Bezier曲線[J]. 西北師范大學(xué)學(xué)報(自然科學(xué)版), 2014, 50(2): 26-29, 34.
[18]劉二濤, 劉紅衛(wèi), 劉澤顯. 基于單純形梯度的多起點全局優(yōu)化算法[J]. 吉林大學(xué)學(xué)報, 2016, 54(6): 1282-1288. DOI: 10.13413/j.cnki.jdxblxb.2016.06.17.
[19]付旭云, 田亞鵬, 鐘詩勝, 等. 一種多壽命件機會更換策略啟發(fā)式搜索算法[J]. 航空動力學(xué)報, 2017, 32(8): 1971-1977. DOI: 10.13224/j.cnki.jasp.2017.08.021.
(編輯 賈裙平)
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45