地鐵隧道自由設站變形監測基準網穩定性檢驗
2021-04-28 10:19:56李益斌
現代測繪 2021年1期
李益斌,陳 健
(1.江蘇省地質礦產局第四地質大隊,江蘇 蘇州 215129;2.南京林業大學土木工程學院,江蘇 南京 210037)
0 引 言
目前,在眾多自動化監測手段中,測量機器人自動化監測是地鐵隧道自動化變形監測的主流監測手段,在全國各地的地鐵保護區隧道監測項目中得到廣泛應用[1-3]。測量機器人自動化監測采用“自由設站”的測量模式,通過照準基準點采用后方交會的方式得到測站坐標,再以測站坐標采用極坐標的方式采集監測點的坐標,根據監測點坐標的變化求取變形信息。基準點的穩定可用性是整個變形監測順利進行的基礎保障,由于地鐵隧道所在區域地形條件所限,基準點大多布設在臨近變形區域,因此,對基準網進行穩定性分析很有必要,以便及時發現基準點的變動,避免將基準的變化引入監測點的變形信息[3]。
傳統的基準點穩定性分析方法基本上都是基于統計學理論,采用自由網平差解算每期基準點坐標后,根據點位的位移信息構建統計量,采用統計檢驗的方法進行穩定性分析。而自由設站的測量模式是采用經典平差進行測站坐標的解算,因此,傳統的基于“自由網平差”模式的穩定性分析方法不適用于自由設站的“經典平差”模式[4]。本文立足自由設站測量原理,尋求簡便有效的方法,引用后驗單位權方差χ2檢驗法,對地鐵隧道自由設站變形監測基準網的穩定性進行分析。
1 自由設站測站平差模型
地鐵隧道監測基準點往往布設在認為是穩定的區域,工作基點布設在變形區域。監測基準點與工作基點的關系如圖1所示。基準網類似邊角后方交會,在基準點上不能架設儀器,只能在工作基點上進行全邊角測量[5-8]。
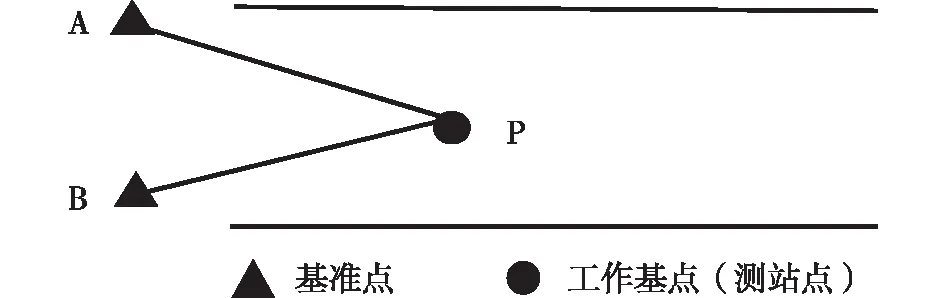
圖1 地鐵隧道自由設站變形監測基準網
自由設站測站平差采用間接平差法,列出角度和邊長的誤差方程式:

(1)
式中的各項具體表達形式為:
(2)
(3)


列出法方程:
(4)
單位權中誤差估值:
(5)
式中,f為自由度,即多余觀測數。
2 基于后驗單位權方差的χ2檢驗

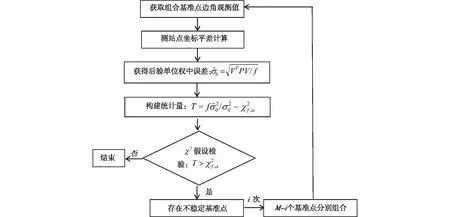
圖2 后驗單位權方差χ2檢驗流程
3 實例分析
選取5個基準點有以下六種排列組合的方式,分別進行檢驗,檢驗的結果如表1所示。
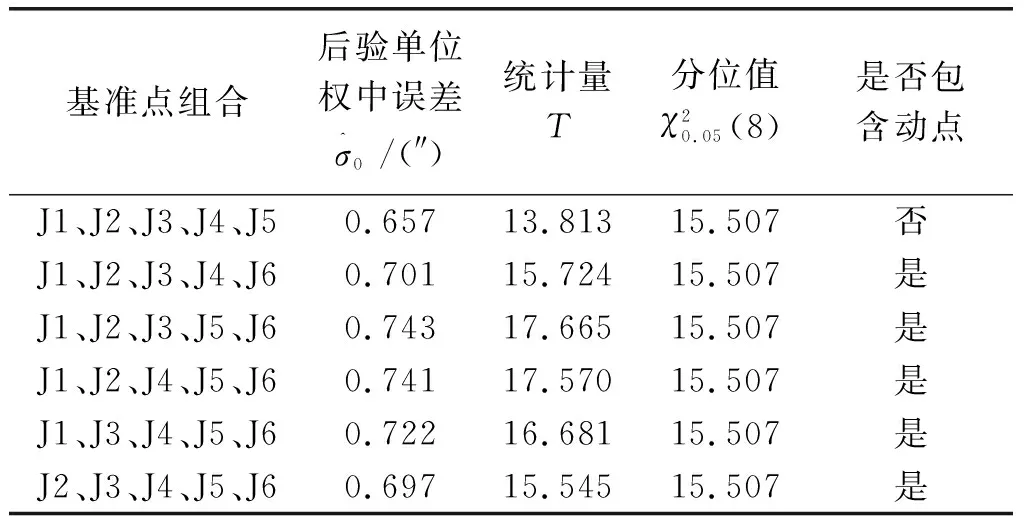
表1 5個基準點的組合檢驗結果
從表1可以看出,除了第一組基準點的組合通過了檢驗以外,另外五組組合都沒有通過檢驗,這五組基準點的組合中都含有基準點J6,由此可以快速得出結論,J1~J5是基準網中穩定的點,基準點J6發生了顯著變動。
為了進一步驗證檢驗判斷的正確性,選擇4個基準點分別組合再次進行檢驗,4個基準點有15種組合方式,分別進行檢驗的結果如表2所示。
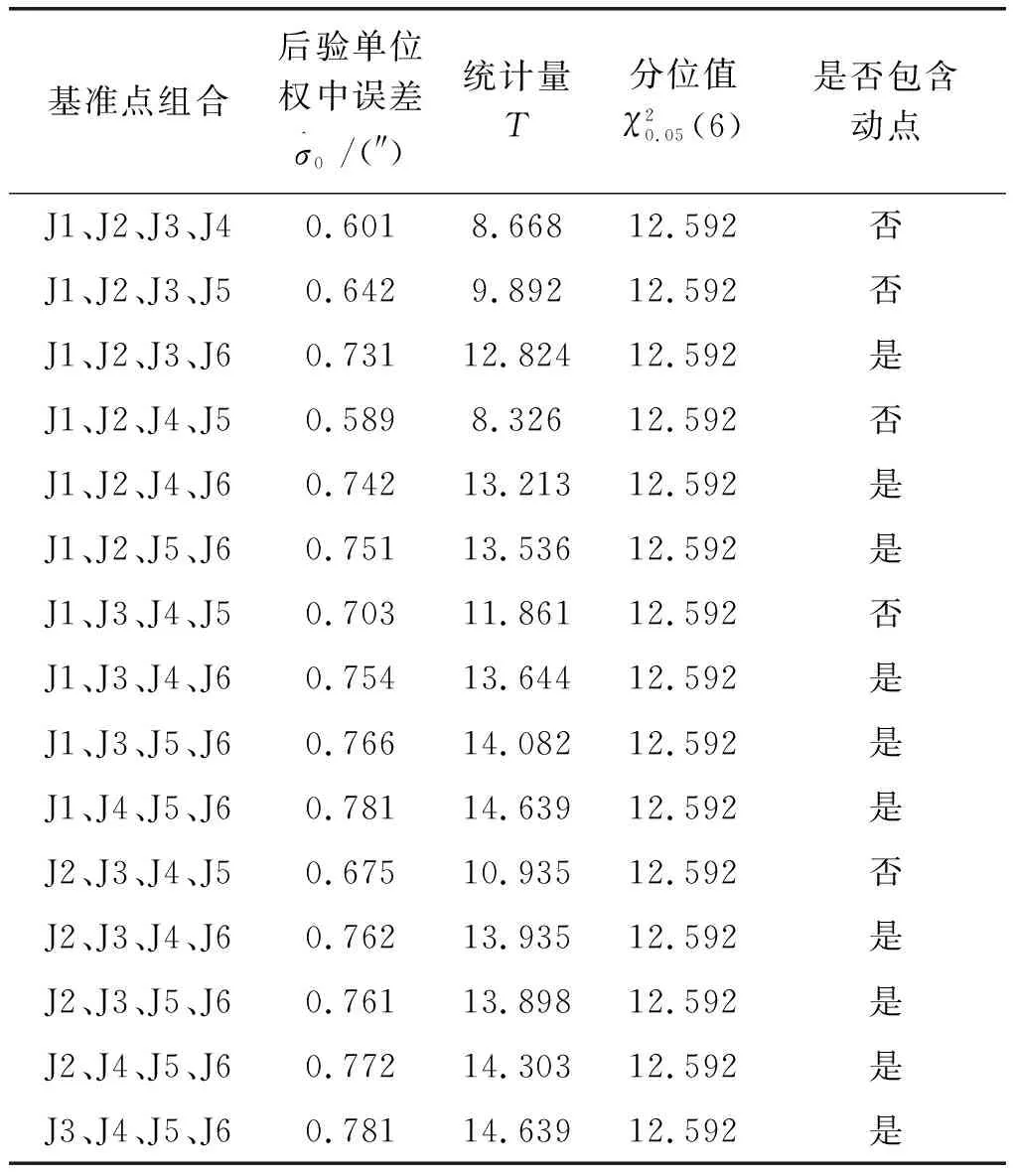
表2 4個基準點組合的檢驗結果
由上表2依舊可以看出包含基準點J6的組合沒有通過檢驗,J6為不穩定基準點,所以在實際的監測中,應當剔除基準點J6,構成新的基準網以保證獲取正確的變形監測數據。需要特別說明的是,由于理論上至少需要布設2個基準點才能采用自由設站法進行監測,當穩定的基準點小于2 h,應當重新建立新的基準。
4 結 語
在地鐵隧道狹長空間中進行測量工作,存在控制點不通視、儀器設站不便等問題,自由設站法能避免諸多復雜工作環境的影響,已廣泛應用于運營地鐵隧道監測中。監測基準網的穩定性是地鐵隧道監測的基礎,為了保證監測數據的可靠性,應當定期對監測基準網進行穩定性檢驗。
區別于其他監測方法所采用的自由網平差,自由設站監測方法采用的是經典平差,傳統的立足于自由網平差的基準點穩定性檢驗方法,如平均間隙法、分塊間隙法等在此無法應用,本文引用后驗單位權方差χ2檢驗法,通過實例分析,驗證了這一方法的實用性,證明其是一種簡便有效的判定基準網中穩定基準點的方法。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21