物聯網背景下的工業危化品電子物流配送路徑規劃
2021-04-27 03:47:54高增亮劉皓若王霞
粘接 2021年8期
關鍵詞:物聯網
高增亮 劉皓若 王霞
摘 要:針對工業危化品物流配送成本高昂、風險性大的特點,本研究基于物聯網,提出一套危化品電子物流配送路徑規劃與監控系統,以提高危化品的運輸效率,進而減小危化品運輸的成本和風險。首先,本研究根據系統的主要工作和目的,對系統整體架構進行了設計。然后結合工業危化品的配送特點,提出MODVRP模型和預優化、實時優化兩階段求解策略。最后,通過實驗驗證了研究提出的模型和算法。實驗結果表明,本研究提出的模型和算法可有效解決多目標動態路徑優化問題,大大降低了運輸成本和風險。
關鍵詞:物聯網;電子物流配送;路徑規劃;MODVRP
中圖分類號:TN929.5 文獻標識碼:A 文章編號:1001-5922(2021)08-0166-04
Path Planning of Electronic Logistics Distribution of Industrial Hazardous Chemicals under the Background of Internet of Things
Gao Zengliang, Liu Haoruo, Wang Xia
(Industrial Internet Innovation Center (Shanghai) Co., Ltd., Shanghai 201306, China)
Abstract:In view of the characteristics of high cost and high risk of industrial hazardous chemicals logistics distribution, based on the Internet of things, this study proposes a set of hazardous chemicals electronic logistics distribution path planning and monitoring system, in order to improve the transportation efficiency of hazardous chemicals, and then reduce the cost and risk of hazardous chemicals transportation. First of all, according to the main work and purpose of the system, the overall architecture of the system is designed. Then, combined with the distribution characteristics of industrial hazardous chemicals, the MODVRP model and a two-stage solution strategy of pre-optimization and real-time optimization were proposed. Finally, the proposed model and algorithm are verified by experiments. The experimental results show that the model and algorithm proposed in this study can effectively solve the multi-objective dynamic path optimization problem, and greatly reduce the transportation costs and risks.
Key words:Internet of things; electronic logistics distribution; path planning; MODVRP
隨著我國化工業的發展,危化品的種類和運輸量在不斷上升。由于危化品具有易燃、易爆、腐蝕等特性,因此在運輸環節往往具有高成本和高風險性。在此情況下,物流企業如何掌控危化品的配送全過程,降低配送的風險和成本,是物流企業亟需解決的問題。目前,常見的工業危化品物流配送路徑規劃與監控系統對動態信息的處理能力較弱,無法滿足危化品運輸對實時性的要求。因此,本研究在采用物聯網對車輛數據進行采集的前提下,提出提出危化品電子物流配送路徑優化目標函數,并通過MODVRP對模型進行求解,以此達到時間、成本和滿意度最優。
1 目標函數
在現代物流配送過程中,成本、旅行時間、客戶滿意度是影響企業利益的和對車輛路徑規劃的主要因素[3]。因此本研究在尋求危化品車輛物流配送最優路徑時,以這3個對象作為模型的目標函數。
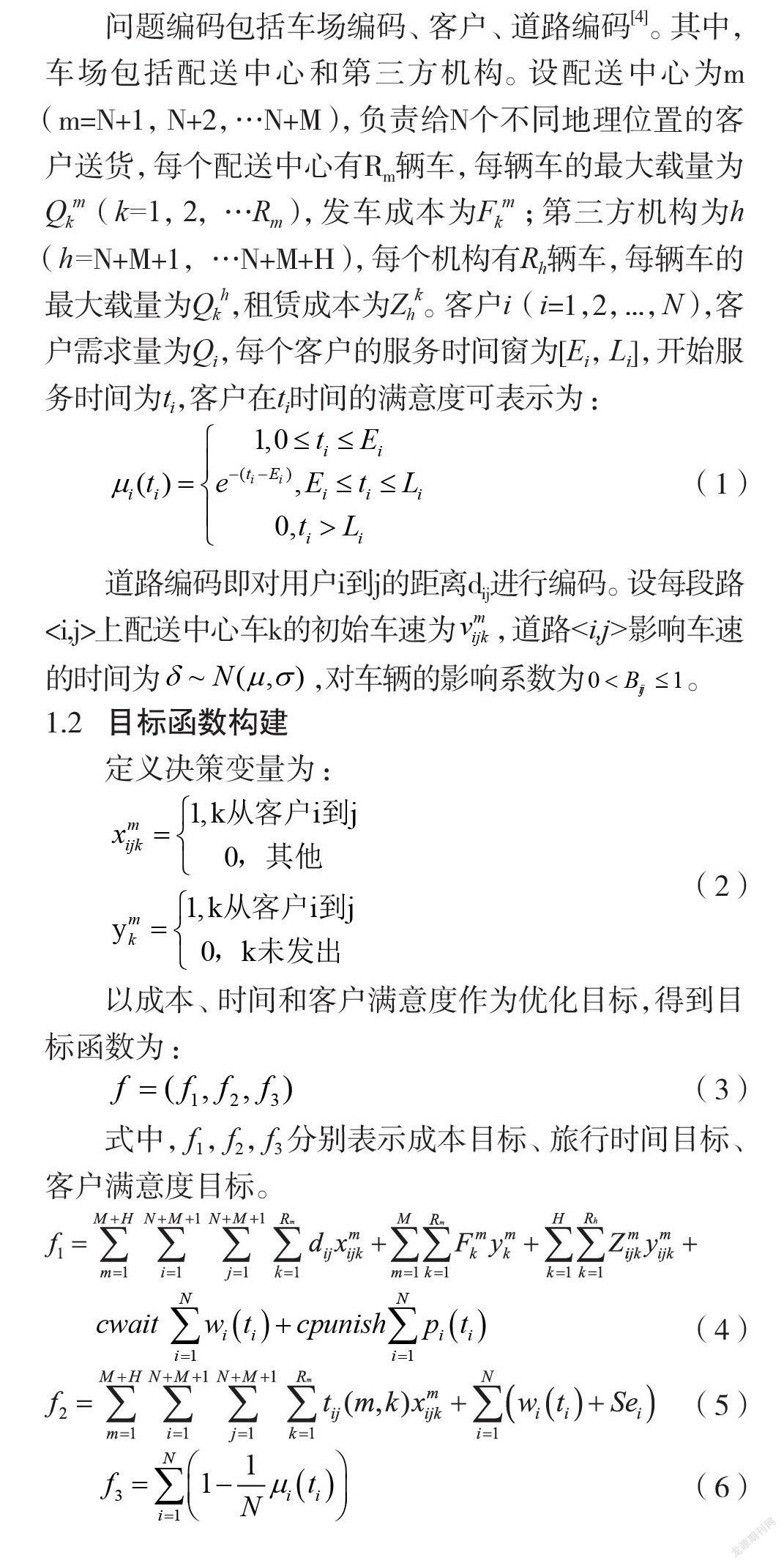
1.1 問題編碼
問題編碼包括車場編碼、客戶、道路編碼[4]。其中,車場包括配送中心和第三方機構。設配送中心為m(m=N+1,N+2,…N+M),負責給N個不同地理位置的客戶送貨,每個配送中心有Rm輛車,每輛車的最大載量為Qkm(k=1,2,…Rm),發車成本為Fkm;第三方機構為h(h=N+M+1,…N+M+H),每個機構有Rh輛車,每輛車的最大載量為Qkh,租賃成本為Zhk。客戶i(i=1,2,...,N),客戶需求量為Qi,每個客戶的服務時間窗為[Ei,Li],開始服務時間為ti,客戶在ti時間的滿意度可表示為:
道路編碼即對用戶i到j的距離dij進行編碼。設每段路
1.2 目標函數構建
定義決策變量為:
以成本、時間和客戶滿意度作為優化目標,得到目標函數為:
式中,f1,f2,f3分別表示成本目標、旅行時間目標、客戶滿意度目標。
2 目標函數求解
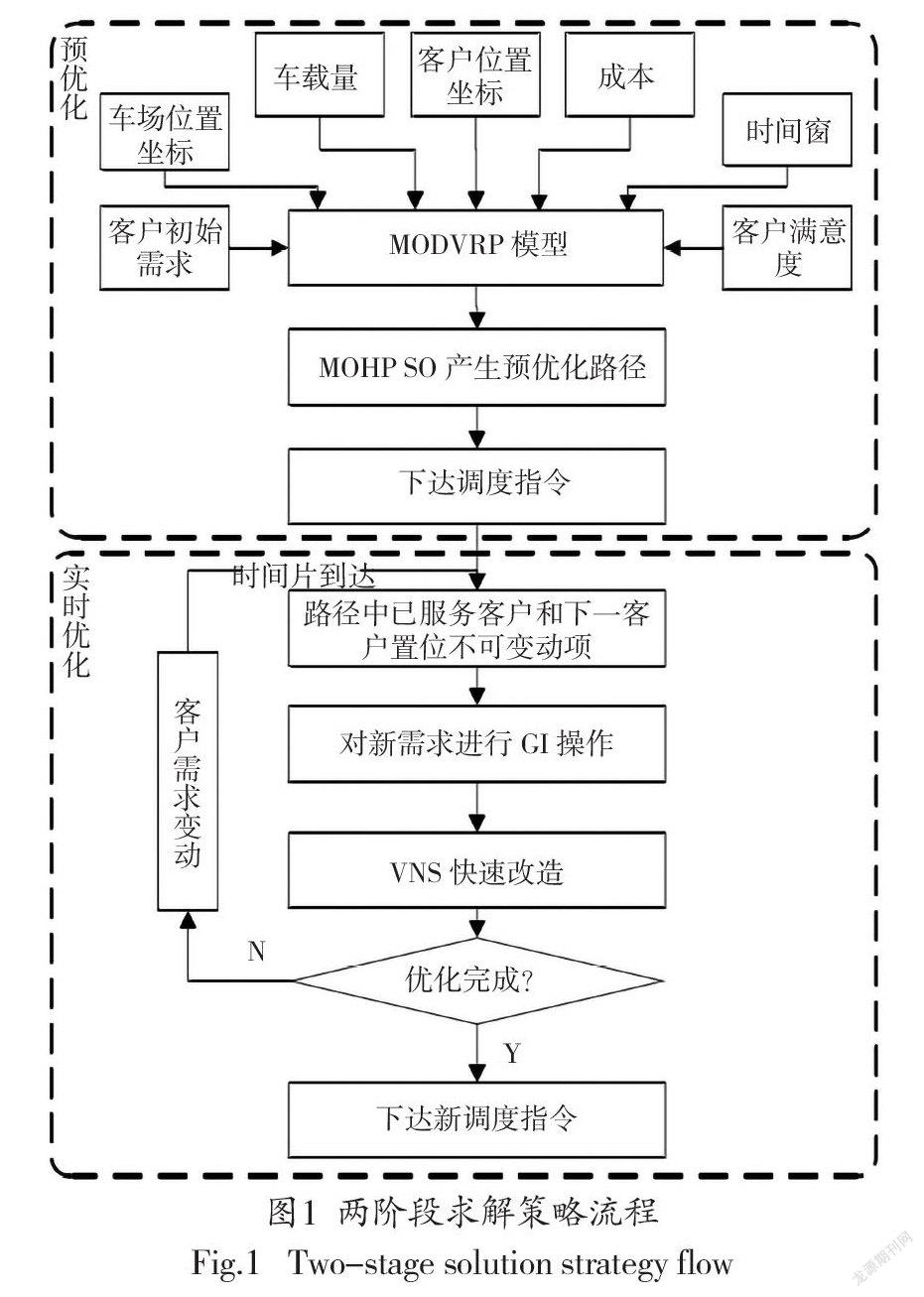
對目標函數的求解分為預優化和實時優化兩個階段,整體求解流程如下圖1所示。在求解過程中,采用預優化和實時優化的方式進行求解[5]。預優化階段是根據用戶需求和相關參數建立MODVRP模型產生預優化路徑。同時考慮到MODVRP具有動態性,采用局部優化用于實時優化階段的路線調整。
2.1 預優化階段
引入Pareto最優解求解預優化階段的最優解,然后應用自適應網格技術進一步求得pareto最優解。算法具體流程如下:①采用整數編碼的方式對問題編碼,并初始化粒子群設置每個粒子的初始位置、速度以及個體的最優解和全局最優解;②選取距離用戶最近的車場中載重量最大的車輛進行配送,計算各個粒子的目標向量值;③應用遞歸法建立非劣解集Ndset,并從中選取個體最優解bestPi和全局最優解bestG;④更新粒子狀態得到新種群,應用自適應網格技術求得Ndset。⑤若滿足終止條件,則停止算法;若不滿足終止條件,則重復步驟③④⑤。
2.2 實時優化階段
實時優化階段主要目的是根據用戶需求的變動信息,實現對路徑的重新規劃,具體優化過程分為兩步,第1步對預優化得到的子路徑進行過濾跟蹤,將服務過的用戶和待服務的用戶設置為不變點;第2步對剩余的用戶進行局部優化。當用戶需求發生變化時,只需修改路徑中的配送量即可。本研究通過GI和VNS兩種方式結合進行實時優化。
(1)GI優化路徑。GI即貪婪插入,主要操作原理是為新增加的用戶點尋找距離最近的點,然后插入在最近點的后面[6]。然后根據不同的車輛裝載量、最大路徑約束等約束條件對路徑進行階段,形成新的路徑。這樣的操作方式可以滿足每個子路徑能插入最多的用戶需求點。雖然GI操作得到了車輛配送的新路徑,但這條路徑并不是最優的,故需要再次對新路徑進行VNS優化。
(2)VNS優化路徑。VNS即變鄰域搜索,主要通過改變鄰域結構首先求得局部最優解,然后再求得全局最優解[7]。對于VNS搜索,本研究設計4種鄰域結構,即路徑內2-opt、路徑間點插入、路徑間點交換、路徑間片段交換。則在上述鄰域結構的基礎上,通過以下步驟進行操作:①令t=0,w=0。任意選擇兩個用戶點,根據兩點路徑選擇鄰域結構搜索;②判斷得到的新路徑相較于原路徑是否有所改進,若有改進,則保留最新路徑;若有改進,但得到的新解f '小于f+σ,則接受新解;若沒有改進,則令w=w+1。其中,σ表示偏差值,值為0.2f。③當t=t+1時,若w>β(β表示最大迭代次數),則停止搜索;反之,重復以上步驟。
3 仿真驗證
本研究實驗中的算法均在MATLAB程序上進行編寫,并在 Intel(R) Core(TM) i5-3470 CPU 3.2GHz,4.0GB上運行。由于MODVRP的特殊性,目前沒有一個統一的測試庫對本研究提出的算法進行測試,故本研究采用設計的實例和標準的MDVRPTW實例庫對提出的算法進行分析。
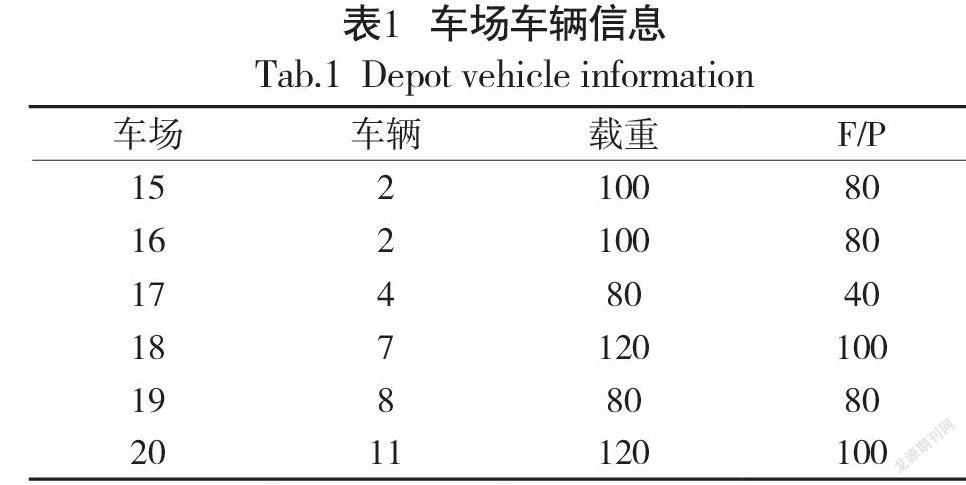
設計實例為4個配送中心,2個第三方機構,14個初始客戶服務。具體用戶信息和車場車輛信息如下表1和表2所示。
應用本研究提出的MODVRP模型和兩階段求解算法對設計的實例進行求解。首先,設置預優化階段種群大小為50,迭代次數為120次,得到Pareto最優解集,具體見圖2所示。
從中選取成本最小的( 5523.8,35.4,0.52 )、用戶不滿意度最小的(5764.9,43.6,0.33 )、旅行時間最小的( 5561.4,35.2,0.41 )的3個目標向量進行路線優化,如表3所示。
在實時優化階段,增加10個新用戶,老用戶中有4個用戶需求增加。根據用戶需求變化,采用VNS算法再次進行路徑優化,并設置非改進最大迭代次數為10次,由此可得Pareto最優解集為具體見圖3所示。
根據圖8的結果,對成本最小( 6001.3,55.6,0.67 )、用戶不滿意度最小( 6872.9,53.8,0.32 )、旅行時間最小( 6792.2,48.4,0.45 )的3個目標向量進行優化,得到最優路徑見表4所示。
4 結語
由于工業危化品的特殊性,其物流配送的成本和風險性較大。在保障安全運輸的基礎上,減少運輸的成本順應了物流企業的需求。本研究基于物聯網,對工業危化品的電子物流配送路徑進行了規劃與監控,實現了對危化品的低成本、低風險的運輸。首先,本研究根據工業危化品運輸調度與監控的主要工作,對系統整體架構進行了設計。然后結合工業危化品的配送特點,提出MODVRP模型和預優化、實時優化兩階段求解策略。最后,完成了對提出的模型和算法的實驗。實驗結果表明,本研究提出的模型和算法可有效解決多目標動態路徑優化問題,降低了運輸成本和風險。
參考文獻
[1]王蘭敬. 基于物聯網的我國區域智慧物流配送能力評價[J]. 商業經濟研究,2020(16):122-124.
[2]趙晨聰,陶文瀚,凌雅文,等. 云計算技術對現代物流業的影響[J]. 計算機時代,2020(08):85-86+90.
[3]于江霞,杜紅亞,羅太波. 基于客戶分類的即時配送路徑優化研究[J]. 交通運輸系統工程與信息,2020,20(04):202-208.
[4]先夢瑜. 基于人工魚群算法的民航運輸路徑智能規劃算法[J]. 電子設計工程,2020,28(17):20-24.
[5]謝龍光,王磊,楊芳,等. 基于模糊算法的帶電作業機器人路徑跟蹤方法研究[J]. 電子設計工程,2020,28(17):33-36+41.
[6]王紅艷. 基于粒子群算法的物流路徑優化方法研究[J]. 電子設計工程,2020,28(17):61-65.
[7]黃富禹,劉春. 基于物聯網技術的隧道自動化變形監測系統設計[J]. 科學技術創新,2020(26):118-119.
[8]吳志峰,吳子岳. 基于GPS/MATLAB的AUV路徑優化分析[J]. 計量學報,2020,41(08):926-931.
[9]郭榮佐,鄧涵文,陳芳瑩,等. 物聯網邊緣計算資源分配模糊建模與優化研究[J]. 小型微型計算機系統,2020,41(09):1878-1886.
[10]張志麗,王力權,王艷君,等. 衛星物聯網系統隨機接入前導序列設計[J/OL]. 無線電通信技術:1-7.
猜你喜歡
軟件導刊(2016年9期)2016-11-07 21:56:29
軟件導刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06
