基于體育輔助運動雙足跑步器的研究與分析*
2021-04-23 02:06:32茍小平張萬軍張景軒張景怡張景妍
甘肅科技 2021年4期
茍小平 ,張萬軍 ,張 峰 ,張景軒 ,張景怡 ,張景妍
(1.隴東學院,甘肅慶陽 745000;2.甘肅澤德電子技術有限公司,甘肅天水 741003;3.蘭州工業化設備有限公司,甘肅 蘭州 730050;4.蘭州大學,甘肅 蘭州 730050)
1 問題的提出
目前,體育運動跑步一般需要體育愛好者和運動員自身跑步[1-2],這樣浪費大多數體育愛好者和運動員的體力、消耗了人力能量,達不到體育鍛煉的目的,沒有借鑒輔助體育跑步器進行體育跑步[3-8],因此,本文設計了一種體育輔助運動雙足跑步器,對體育輔助運動雙足跑步器的結構進行設計,采用無刷電機的PID 控制[9-10]、神經網絡、粒子群蟻算法、交叉耦合控制[11-12]、自適應控制[13]等。甘肅澤德電子技術有限公司的教授級高工、高級經濟師、博士張萬軍等人研究了一些模型辨識控制系統及交叉耦合控制[14-22]體育鍛煉輔助機器人,但本文僅對體育輔助運動雙足跑步器結構及使用性能進行分析,希望在體育產品設計進行大力的技術推廣,更好的服務廣大人民群眾。
本文設計了一種體育輔助運動雙足跑步器,進行了常規步態軌跡、測量步態軌跡、實際控制步態軌跡性能測試實驗,實驗表明:體育輔助運動雙足跑步器方面使用明顯優于其他的人體跑步。實驗在隴東學院體育學院實驗取得良好的效果;同時,在其他的地方體育的教學和訓練具有較強的借鑒意義。
2 體育輔助運動雙足跑步器的結構設計
一種體育輔助運動雙足跑步器的結構設計簡圖,如圖1 所示。從圖1 中可以看出,一種體育輔助運動雙足跑步器包括:(1)雙足跑步器腳踏板;(2)放置腿腳器;(3)鏈傳動器;(4)彈簧連接驅動器;(5)驅動器;(6)雙足跑步器的驅動電機。雙足跑步器腳踏板1 和放置腿腳器2 使用可拆卸式連接方式,雙足跑步器的驅動電機6 通過螺栓固定連接在雙足跑步器腳踏板1 上部。

圖1 體育輔助運動雙足跑步器的結構設計簡圖

圖2 體育輔助運動雙足跑步器動作分解圖
體育輔助運動雙足跑步器完成跑步過程:腳放置腿腳器2 踏地,此時雙足跑步器的驅動電機6 驅動器5 縮短,產生拉動體育輔助運動雙足跑步器的力,該拉力大于下彈簧連接驅動器4 產生的力,從而圍繞鏈傳動器3 對雙足跑步器腳踏板1 形成緩沖力矩,降低落地的顫抖;在拉升過程,雙足跑步器的驅動電機6 不驅動驅動器5,體育輔助運動雙足跑步器在動態平衡狀態,不產生力,拉下彈簧連接驅動器4 產生拉力,提供彈跳驅動力矩,有利于體育輔助運動雙足跑步器速度的提升。
3 仿真結果與實驗分析
3.1 步態軌跡性能測試分析
常規步態軌跡、測量步態軌跡、實際控制步態軌跡進行步態軌跡性能測試分析,如圖3~4 所示。
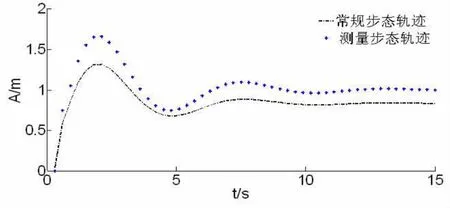
圖3 步態軌跡性能測試分析1
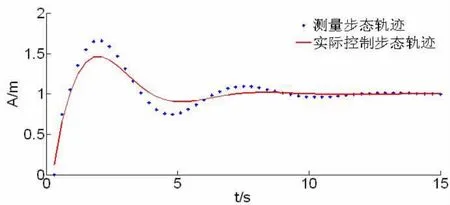
圖4 步態軌跡性能測試分析2
常規步態軌跡、測量步態軌跡、實際控制步態軌跡進行分析,常規步態軌跡、測量步態軌跡相一致達到測試目的,滿足體育輔助運動雙足跑步器設計要求;同時,實際控制步態軌跡明顯優越于常規步態軌跡、測量步態軌跡:從而表明體育輔助運動雙足跑步器的穩定性較好和舒適性強。
3.2 實際測試實驗
實驗在隴東學院體育由甘肅省創業大賽名師茍小平副教授進行實驗,實驗數據的分析由甘肅省澤德電子技術有限公司的教授級高級工程師、高級經濟師、博士張萬軍進行對照實驗,說明對照組實驗有非常顯著性差異。實驗在隴東學院體育學院實驗取得良好的效果;同時,在其他的地方體育的教學和訓練具有較強的借鑒意義。
4 結論
1)本文設計了一種體育輔助運動雙足跑步器,進行了常規步態軌跡、測量步態軌跡、實際控制步態軌跡性能測試實驗,實驗表明:體育輔助運動雙足跑步器方面使用明顯優于其他的人體跑步。
2)實驗在隴東學院體育學院實驗取得良好的效果;同時,在其他的地方體育的教學和訓練具有較強的借鑒意義。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
甘肅教育(2020年2期)2020-11-25 00:50:04
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
少兒美術(快樂歷史地理)(2018年2期)2018-09-25 02:47:54
河南理工大學學報(社會科學版)(2016年1期)2017-01-15 13:52:23
中國科技信息(2016年20期)2016-12-08 06:39:48
學苑創造·A版(2016年9期)2016-10-10 11:14:12
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
