抽油泵固定凡爾球運動規律的數值模擬
2021-04-22 11:56:46王小兵呂雷綱龔浩宇王多琦
流體機械 2021年3期
關鍵詞:模型
王小兵,呂雷綱,李 森,邊 斌,劉 陽,龔浩宇,王多琦
(1.常州大學 石油工程學院,江蘇常州 213164;2.Biological and Environmental Sciences and Engineering(BESE)Division,Water Desalination and Reuse Center(WDRC),King Abdullah University of Science and Technology,Thuwal 23955-6900,Kingdom of Saudi Arabia)
關鍵字:有桿抽油泵;固定凡爾球運動規律;多物理耦合;動網格;接觸壓力方法
0 引言
國內各油田大約80%的生產井使用有桿抽油技術,全國各大油田60%的產液量、75%的產油量是靠有桿抽油設備采出的[1]。抽油泵作為有桿抽油系統中核心的流體機械,工作原理是其固定凡爾球與游動凡爾球的周期性啟閉控制泵內流體的吸入與排出。
通過試驗對抽油泵固定凡爾球井下運動規律的測定有很大的困難,因此需要借助于數值模擬等方法。試驗研究[2]表明了固定凡爾球的實際運動狀態,但未能得出太多具有參考價值的結論;自1967年,ADOLPH[3]考慮固定凡爾球的受力以及運動特性,利用差分法構建了固定凡爾球運動規律的微分方程后,孟英峰等[4-8]從數學模型方面解決微分方程中的奇點問題、魏氏效應等。余海洋等[9]基于MATLAB,針對有桿抽油泵的上沖程階段進行模擬研究,并探討了流體的動力特性等因素對吸入特性的影響;吳建軍等[10]借鑒前者的理論成果,通過Simulink對抽油泵固定凡爾進行仿真;李凌川等[11]基于FLUENT軟件,結合動網格技術和UDF編程,對流體進泵的過程進行數值模擬得到了固定凡爾球的運動規律,在解決固定凡爾球與球罩的碰撞問題時采用了彈性恢復系數來描述固定凡爾球碰撞后的運動規律。以上文獻存在一些未能解決的問題:建立的數值模擬對柱塞位移引起泵內體積增大的控制是依靠設置固定凡爾排出口為動邊界,這對網格的影響極大,降低了計算的精度;對固定凡爾球與泵內壁面接觸影響網格質量的解決方法并未具體說明,且研究中運用彈性回復系數描述凡爾球運動的方法忽略了流體阻力的影響。參考數值模擬在相關領域的研究[12-18],為現有的問題提供解決方案。針對以上問題,應用COMSOL Multiphysics 仿真軟件,對黏性流體中抽油泵固定凡爾球的運動規律進行數值模擬;將CFD方法與固體力學耦合,并結合動網格技術以及接觸壓力方法,建立固定凡爾球的流固耦合模型。解決了上沖程階段柱塞、固定凡爾球運動以及與其他固體壁面接觸引起的網格變形和奇點問題,進而建立更加合理的固定凡爾球運動模型。研究結果得到了泵內流場分布以及固定凡爾球的運動規律曲線。所得結果為實際生產中抽油泵工作制度優化等提供了理論依據。
1 基本理論分析
1.1 假設條件
固定凡爾球做豎直向上的直線運動,而且伴隨兩種旋轉運動,若柱塞運動速度較小時,固定凡爾球繞水平軸自上而下轉動[2,19];當柱塞的運動速度較大時,固定凡爾球繞垂向軸水平方向自轉,同時,沿閥座內孔邊角繞球座孔軸線公轉;因為泵筒體積狹小,橫向的漂移很小。為簡化計算,提出以下幾點假設:(1)油井為直井,泵筒無傾斜;(2)閥球沿閥座中軸線運動,不考慮自轉及公轉;(3)柱塞與泵筒間不存在漏失;(4)泵內流體為油水混合物,且不含溶解氣。
1.2 固定凡爾球的受力分析
在假設凡爾球不存在自轉和公轉的前提下,凡爾球的受力情況如圖1所示。凡爾球在垂向上受到自身產生的重力G、浮力FB以及流體對凡爾球的繞球作用力FD三者的共同作用。此外,凡爾球與壁面碰撞時還應考慮接觸壓力。
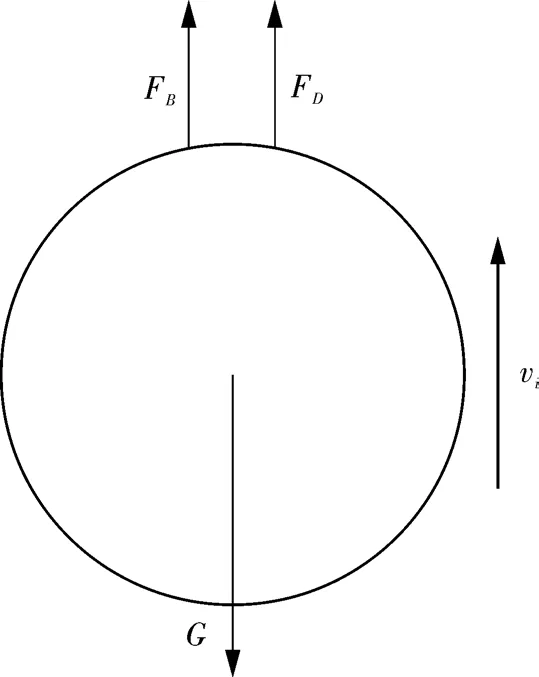
圖1 凡爾球受力示意Fig.1 Schematic stress diagram of valve ball
2 基于COMSOL Multiphysics的多物理場耦合模型
單純的CFD方法不能解決流體域與固體之間的接觸壓力問題,還需要考慮固體力學解決流體域中兩固體的彈性碰撞問題。因此使用COMSOL Multiphysics建立流固耦合模型進行瞬態研究,耦合類型選擇全耦合。完成模型選擇之后,在模型開發器界面中主要包含組件和研究兩個部分。組件中完成幾何模型、邊界條件及網格的設置,研究中選擇求解器和時間步長。
2.1 幾何模型
抽油泵固定凡爾是軸對稱結構,所以選擇二維軸對稱的空間結構進行抽油泵固定凡爾幾何模型的建立能節約計算內存且節省計算時間。研究外徑70 mm的固定凡爾,幾何模型如圖2所示。

圖2 抽油泵固定凡爾的幾何模型Fig.2 The geometric model of the standing valve of the oil well pump
2.2 抽油泵固定凡爾的物理模型
抽油泵固定凡爾的物理模型包括流體流動模型和固體力學模型,流體流動模型通過對雷諾數的計算選擇層流或是湍流;固體力學模型通過材料屬性選擇研究對象為線彈性材料、非線彈性材料或其他。抽油泵固定凡爾球的打開或關閉都會使泵內形成狹窄流道,則流動形態為湍流,湍流模型中的k-ε模型對于復雜幾何周圍外部流動問題的求解效果良好,因此流體流動模型選擇k-ε模型,考慮流體可壓縮性且包含重力。抽油泵及其配件的材料為鋼質,則固體力學模型的研究對象確定為線彈性材料,對凡爾球設置重力,指定柱塞位移,其他部件設置為固定。
2.3 接觸壓力方法
柱塞未開始運動時,固定凡爾球由于重力原因落在球座上從而關閉吸入口,速度為零,此時固定凡爾球上下兩部分的流體不連通、流體連續性被破環,從而出現了奇點問題。根據機械密封理論[20],固定凡爾球與球座的接觸面有一層液體薄膜,說明保證流體連續性即通過數學方法給固定凡爾球與泵內會產生接觸的壁面設置偏移距離實現對奇點問題的解決。
首先,在模型開發器界面中組件的定義節點中添加接觸對,選擇凡爾球的壁面為源邊界、選擇球座及球罩的接觸壁面為目標邊界如圖3所示。
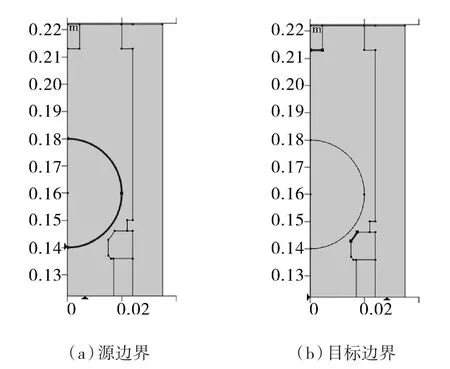
圖3 定義壁面的接觸對Fig.3 Definition of the contact pair of the wall
其次,在組件中的固體力學模塊中添加接觸節點,選用定義的接觸對;接觸壓力方法選擇罰函數;偏移距離的設置需要重復測試,最后優化為5 μm。該方法在不影響壁面接觸壓力的同時實現了流體的連續性,從而解決了凡爾球與泵內壁面的接觸引起的網格問題。
2.4 動網格及網格劃分
固定凡爾球運動時必須使用動網格技術適應邊界的運動或變形。在動網格節點中,添加變形域節點并選擇所有流體域,網格平滑類型選擇Yeoh(更易于收斂);添加固定邊界節點并選擇出入口邊界以及固體壁面;添加指定網格位移節點并選擇會發生移動的所有邊界。
對柱塞段的網格劃分采用映射網格,選擇分布方法對各邊界上的網格數量進行定量劃分,從而解決了大變形以及網格大量的重復劃分造成的內存不足問題。對固定凡爾的網格劃分采用自由三角形網格,并添加邊界層和角細化對邊界進行處理,對流體域進行加密、固體域適當粗化,網格如圖4所示。
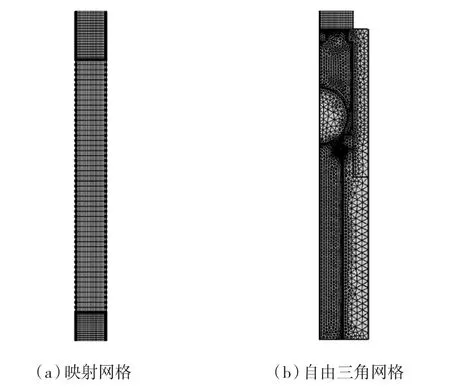
圖4 網格劃分Fig.4 Mesh division
2.5 自動重新劃分網格
固體域位置的不斷變化會導致網格質量變差,所以對大位移的模型要進行自動重新劃分網格的設置。自動重新劃分網格的操作步驟:在研究的步驟節點中,選用自動重新劃分網格;然后獲取求解器配置的初始值,在求解器配置節點中的瞬態求解器中設置自動重新劃分網格的條件,選擇條件類型為失真并設置超出失真范圍時停止為1。
2.6 固定凡爾球的初始位置
當柱塞未開始工作時,固定凡爾球落于球座上并關閉吸入口。在幾何模型的繪制時將固定凡爾球與球座進行配合,會破壞流體域連續性的網格拓撲結構,則凡爾球最初需要一段初始距離使固定凡爾球在重力作用下落在球座上,同時這一過程要對接觸壓力方法以及偏移進行調整優化。對柱塞位移施加時間條件,固定凡爾球因重力下落在球座上,時間控制函數為:(t[1/s]> 0),該函數表示與時間相關的變量從0 s開始施加,從而為模型計算提供了合理的初始值。
時間步設置為(-t0,Δt,t1),表示開始計算之前的t0時間段內固定凡爾球落于球座上,完成凡爾球初始位置的設定。在開始計算時,突然施加入口壓力改變會導致計算錯誤,因此在入口壓力邊界寫入階躍函數,從而解決壓力突變造成計算的不收斂。
3 結果分析
模型的計算參數為:固定凡爾外徑70 mm、腔體內徑48 mm,凡爾球直徑40 mm,球座厚度10 mm、內徑30 mm,吸入口直徑34 mm;泵筒上端流域長5 m、內徑48 mm;固定凡爾、凡爾球、球座的材料均為鋼質,密度為7 850 kg/m3、楊氏模量為210 GPa、泊松比為 0.3;泵內流體黏度為 10 mPa·s、密度為900 kg/m3;上沖程階段游動凡爾球關閉,以固體域近似為柱塞,長度為0.6 m。入口壓力為3 MPa,出口壓力為10 MPa,柱塞沖程為3 m、沖次為6 r/min,下泵深度為1 000 m。研究該工況下固定凡爾球的運動規律,分析柱塞沖次和泵內流體粘度對固定凡爾球運動的影響。
3.1 固定凡爾運動規律分析
抽油泵固定凡爾球的位移曲線和打開程度反映了凡爾球打開的響應速度,所得結果如圖5所示。
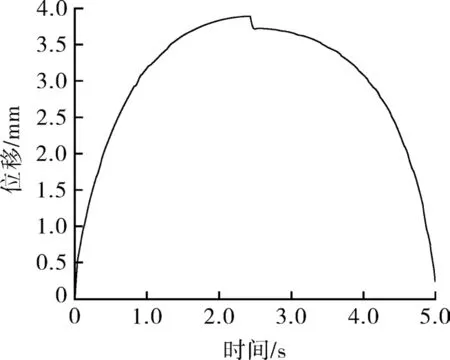
圖5 固定凡爾球運動規律曲線Fig.5 Motion curve of the standing valve ball
由圖5可知:泵內流體為油水混合物且不含氣體時,泵內較小的空間內液體體積膨脹很微弱,凡爾球的打開過程幾乎不存在滯后現象,在柱塞上行的同時固定凡爾球打開;隨著柱塞的不斷上行,凡爾球上升高度越來越高,且運動過程中有一定的波動并且在兩個時間點存在明顯的小幅度回落,最大升程為3.88 mm,所需開啟時間為2.43 s;在整個上沖程階段,固定凡爾球并未到達球罩所在高度而是在一定高度處懸浮,且柱塞上行的后半段(柱塞的減速上升階段),固定凡爾球逐漸回落且最終幾乎關閉吸入口,滯后關閉時間較短。
3.2 沖次對固定凡爾球位移的影響
研究的沖次范圍為 2,4,6,8,10 r/min,得到固定凡爾球的運動規律曲線如圖6所示。
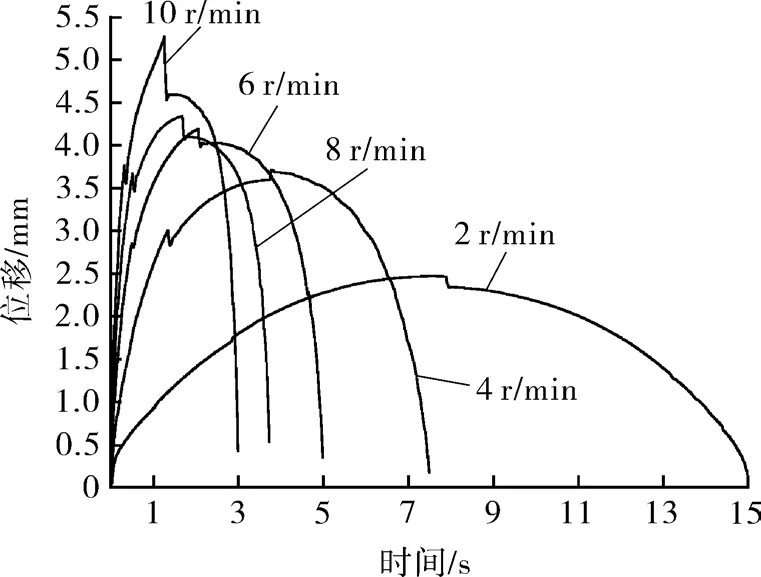
圖6 沖次對固定凡爾球升程的影響曲線Fig.6 The influence curve of times of stroke on the motion law of standing valve ball
由圖6可知,沖次越高固定凡爾球運動過程中的波動性越強且運動過程中出現的瞬間回落或者上升的幅度越大;在研究的沖次范圍內,固定凡爾球都未到達球罩所在高度而是在一定高度處懸浮,沖次越高升程越高;在柱塞上行的后半段(柱塞的減速上升階段),固定凡爾球逐漸回落且最終幾乎關閉吸入口,沖次越高關閉程度越小。沖次越高升程越大,所需的開啟時間越短;當沖次為2 r/min,最大升程為2.46 mm,所需開啟時間為7.38 s;當沖次為4 r/min,最大升程為3.71 mm,所需開啟時間為3.8 s;沖次為6 r/min,最大升程為3.88 mm,所需開啟時間為2.43 s;當沖次為8 r/min,最大升程為4.33 mm,所需開啟時間為1.7 s;當沖次為10 r/min,最大升程為5.26 mm,所需開啟時間為1.27 s。
3.3 泵內流體黏度對固定凡爾球位移的影響
研究的泵內流體黏度為 10,30,50,70,90,110 mPa·s,并確定出凡爾球完全打開時的臨界黏度,得到固定凡爾球的運動規律曲線如圖7所示。

圖7 泵內流體黏度對固定凡爾球位移的影響曲線Fig.7 The influence curve of viscosity of fluid in pump on the motion law of standing valve ball
如圖7所示,在研究的泵內流體黏度范圍內,黏度小于54 mPa·s(臨界黏度)時,凡爾球的打開程度隨泵內流體黏度的增大而增加,但未完全打開;黏度大于54 mPa·s時,固定凡爾球完全打開,且黏度越大打開時間越短;當凡爾球由于球罩限制,與其發生碰撞時,凡爾球經過反彈后在流體作用力下懸浮在球罩處;在柱塞上行的后半段(柱塞的減速上升階段),固定凡爾球逐漸回落且最終幾乎關閉吸入口,黏度越高滯后關閉時間越長,且黏度大于54 mPa·s時,固定凡爾球在接近球座時波動性更強。流體黏度越高固定凡爾球的升程越大,固定凡爾球達到最大打開程度所需開啟時間越短,黏度為10 mPa·s,最大升程為3.88 mm,所需開啟時間為2.43 s;當黏度為30 mPa·s,最大升程為4.29 mm,所需開啟時間為2.16 s;黏度為50 mPa·s,最大升程為4.77 mm,所需開啟時間為2.17 s;黏度為54 mPa·s時,固定凡爾球完全打開,所需開啟時間為1.42s;流體黏度為70 mPa·s,固定凡爾球完全打開,所需開啟時間為1.28 s;流體黏度為90 mPa·s,固定凡爾球完全打開,所需開啟時間為1.17 s。
4 結論
(1)構建抽油泵固定凡爾球的流固耦合模型運用了動網格技術及接觸壓力方法,對入口壓力邊界結合階躍函數解決了奇點問題和固定凡爾球與泵腔內壁面的接觸問題,從而為柱塞泵球形凡爾的流體機械設計、優化提供了數值模擬方法。
(2)沖次增加固定凡爾球的升程增加,但在研究范圍內固定凡爾球完全打開;沖次增加對固定凡爾球上升過程的穩定性有不利影響,沖次越高越易引起固定凡爾球在實際工作中與其他壁面碰撞的機會,造成球體損壞引起的流體漏失,降低泵效。
(3)泵內流體黏度越高固定凡爾球的升程越高所需開啟時間越短;黏度54 mPs·s時為臨界黏度,小于54 mPa·s時固定凡爾球不能完全打開,大于54 mPa·s時固定凡爾球完全打開,與球罩產生碰撞并有較小幅度的反彈,最終穩定在球罩出,泵內流體黏度對固定凡爾球的開啟程度影響顯著。
(4)對沖次和泵內流體黏度的分析為有桿抽油泵的工作制度優化提供了理論參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
