家用智能投喂-灌溉機器人*
2021-04-22 03:22:06劉美江偉楊玉清雷軍段建發王念江
數字技術與應用 2021年2期
劉美 江偉 楊玉清 雷軍 段建發 王念江
(六盤水師范學院礦業與土木工程學院,貴州六盤水 553000)
0 引言
對現有的市場調查,在家用智能投喂灌溉方面的研究是十分稀缺的。由于市場已有的設計大多是單方面的研究,沒有整合多種功能,特別是智能投喂的研究方面,少有涉及到空間較小的家庭魚缸,大都在池塘,湖泊等開闊的環境;家用智能灌溉以管道運輸噴灑形式為主,對于花園等倒還可以應付,但在臥式,客廳等比較高雅的場所就顯得過分突兀和不合時宜,因此出于以上等原因,對家用智能投喂-灌溉機器人做了相關的研究與設計。該設計主要運用單片機智能控制系統[1],實時監控等技術將食物余量,空氣和土壤的濕度反映在LED顯示器上,實現在家庭生活中對魚和植物的智能投喂和灌溉。
1 軟硬系統設計
該設計由取材裝置,機器人及其規劃路線即導航三大部分組成,可細分為硬件系統和軟件系統[2],這里硬件部分可以分為從取材裝置硬件系統和運輸機器人硬件系統。由于取材裝置集陳放和提取與一身,食物和水需要存進去和取出來,考慮到食物與水的呈現形態特征,需要設計兩個端口。在水管處設置一個微電腦時空開關,全自動時間定時器監控流入盛水容器,當水量足夠后,測距模塊收到數據反映給中央處理器CPU即可停止補水作業;食物的補給相比就簡單多了,在這個過程中,食物多是固體顆粒,只需考慮保質期和密封性的問題,而補給這個作業由人存放,應為通道呈45度角,直接打開閥門即可取食,作業完成后閥門關閉,保持存放食物處的適宜溫度和密封性。因此取材裝置的硬件系統有單片機控制模塊,全自動時間定時器,測距模塊,傳感裝置,LED顯示器[3]。基于此,取材裝置可放置在靠近水源處,如廚房或浴室等。
中介機器人要完成取水,路線的選取,投喂和灌溉作業,因此其硬件系統包括:單片機智能控制系統、GPS定位導航模塊、溫度傳感器模塊、測距模塊、LED顯示模塊、投喂和灌溉模塊、抽水模塊、電源電路模塊等[3]。因為設計由三個復雜的負反饋系統組成,其中各部分互相作用,因此,路線的規劃就包含在整個系統里了。
2 軟件系統設計
檢查電路完備情況,確定設備周邊環境安全可靠后接通電源,單片機開始運作,將測距模塊傳感器模塊接收到的信息傳到中央處理器CPU進行處理,將此時刻的溫度、濕度、水量、食量顯示在LED液晶屏上。如果顯示屏呈現的溫度和濕度高出單片機程序所設置的溫度和濕度時,則灌溉系統啟動,灌溉工作開始;反之,灌溉系統不啟動。若LED顯示屏上的溫濕度小于程序所設的值,灌溉系統呈現關閉狀態[4];該操作周而復始,反復重復。當水量小于單片機程序設置的值在顯示在顯示屏中,抽水泵啟動開始抽水補給蓄水池;當抽水泵不啟動時,則表明水量達到設定值,水量處于飽和狀態,那么抽水泵關閉;以上作業在不斷的重復,以檢測數據,完成傳遞,做出指令來實現整個作業。此外還要實現投喂作業,單片機將接收到的信號通過中央處理器處理后,食量的多少反映在顯示屏上,未超過程序值時,投喂系統不進行投喂作業,處于關閉狀態;當顯示屏顯示值大于所設置的值,投喂系統開始工作,系統運行,積極作業。
2.1 方案難點
(1)ADC0809使用的運算方法導致運算輸出的結果不夠準確[1];
(2)單片機能接受的工作電壓太小,抽水泵不能完成抽水作業;
(3)溫濕度傳感器靈敏度的調節和測距模塊與蓄水池的距離設置[3];
(4)GPS定位導航同傳感器與單片機以及LCD顯示屏的結合應用;
(5)由于工作范圍不大,對GPS定位精度要求極高。
2.2 關鍵技術
(1)GPS定位導航技術;
(2)通過測距模塊測試水量和食量;
(3)單片機控制傳感器并通過A/D轉換器將值顯示在顯示屏上[2];
(4)硬件中,投喂系統和灌溉系統的整合設計,且保障系統穩當耐用;
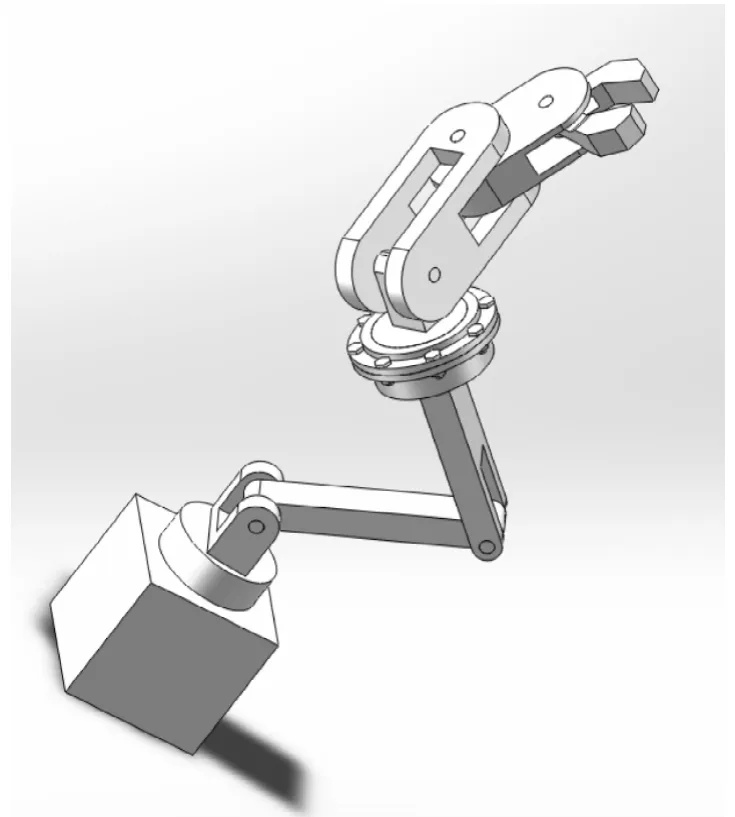
圖1 機械手建模圖Fig.1 Manipulator modeling diagram
(5)軟件中,單片機系統的可靠性技術要求高,多個程序同時調用又不能彼此影響。
針對家用智能投喂-灌溉機器人伸縮高度的研究,因為每一個家庭環境的不同,對魚缸的高度,花盆的放置情況有所不同,根據不同的放置高度,對機器人的收縮問題進行分析與設計。
2.3 機器人功能基礎
由于投喂和灌溉的需要,機器人手臂需要進行投喂和灌溉作業,這即是機械臂需要實現的功能。包括上臺手臂,進行作業,縮回手臂。因此該機械臂具有收縮的附加功能,輔助機器人完成作業。因為機器人的功能基礎,本團隊進行了兩種方案設計:
方案一:機械臂設計;
方案二:機器人的底座設計一個伸縮裝置。
經過對比后選擇方案一更具優勢,最終選擇方案一進行分析設計。
3 機械臂的結構設計
應為設計功能的需要,機械臂起相當一個傳送介質,動物需要用到食物和植物需要水分均需要通過手傳遞,因此作為機械的一個重要組成部分,手臂不僅起到支撐重物、傳遞,運輸的作用,而且還可以驅動手爪提取水,并根據事先預定的路線將水和食物體搬運到指定地點。
以為傳輸的物質的形態不一,設計機械臂左臂需投喂,右臂灌溉。即都需滿足一下設計原則:
(1)剛度要大;避免運動過程中發生較大的形變;
(2)導向性要好;避免運動過程中發生無用的相對運動;
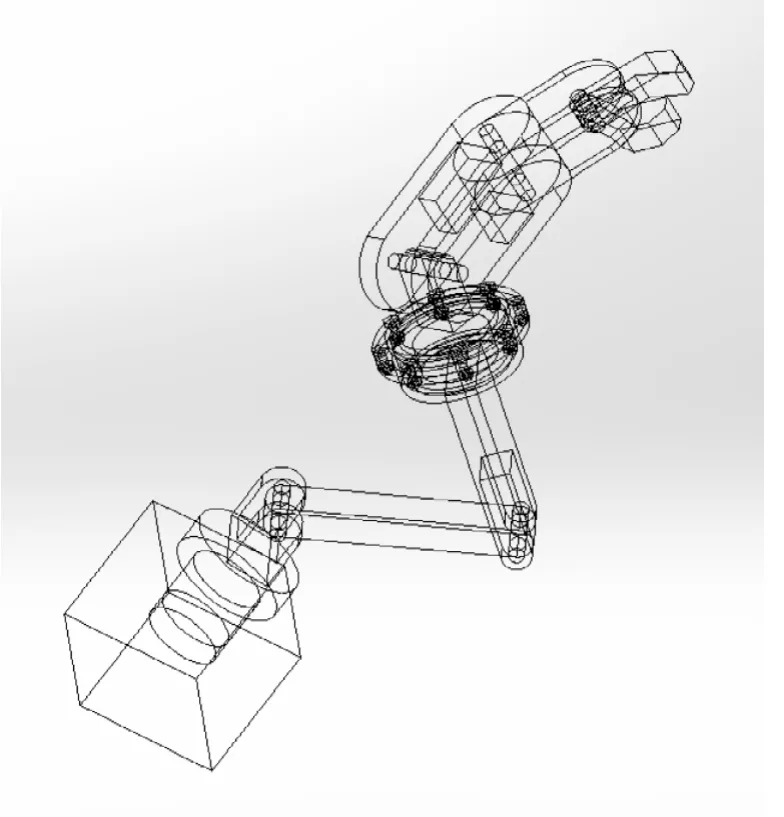
圖2 機械手Fig.2 Manipulator
(3)偏重力矩要小;機械臂不止要承受重物的質量,還要承擔自身的重量,因此要盡可能減小機械臂運動部分的質量。
自由度的確定:機械臂的自由度的選擇取決于機械臂的功能和結構,是能否順利完成任務的一個保障。根據機械臂要實現的功能來計算機械臂需要的自由度。一般來說機械臂的自由度越多,靈活性越大,通用性越強。機械臂越多就意味著成本越大,因此在能完成任務的前提下,該機械臂(左臂)使用四個自由度即可完成作業,建模如圖1、圖2,右臂雷同。
4 結語
家用智能投喂-灌溉機器人可用在家庭喂食魚苗,烏龜等小動物,灌溉觀賞的盆栽植物,小范圍的公園灌溉等也可應用,由于該設計是針對性是創造,適用范圍和對象有一定的限制,并不能十分廣泛用于各種各樣的場景,如農田灌溉莊稼,湖泊投喂等。不過該設計對食物的安全性,水量的測量,空氣濕度的顯示比較精準,可以通過液晶顯示器觀察到整個作業過程,視覺上增加了人的參與度,實際解放了勞動力,節約了時間成本和水資源。該設計運用科學監測技術和數據分析方法,合理投喂和灌溉,讓作業對象能更加科學合理的進食和吸收水分。因此設計不僅實現了實時智能監控,而且節約了成本,對于高質量的居家生活和旅游人生都是一個保障,同時,提供一種能動的體驗。在智能智造的大背景下,家用智能投喂灌-溉機器人能方便我們的直接價值的同時還能帶來更多的潛在價值,如美的體驗,節約資源,美化環境,提高生活質量等,因此具有巨大的使用前景和市場空間。
猜你喜歡
當代工人(2020年8期)2020-05-25 09:07:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09