基于單片機(jī)的直流電機(jī)閉環(huán)調(diào)速系統(tǒng)設(shè)計(jì)
2021-04-22 03:22:04王波
數(shù)字技術(shù)與應(yīng)用 2021年2期
關(guān)鍵詞:單片機(jī)
王波
(廣東海洋大學(xué)電子與信息工程學(xué)院,廣東湛江 524088)
0 引言
近年來微機(jī)數(shù)字化控制技術(shù)的成熟,以及PID控制、模糊控制、神經(jīng)網(wǎng)絡(luò)等高效控制算法的應(yīng)用,加速了直流電機(jī)調(diào)速領(lǐng)域的蓬勃發(fā)展。由于直流電機(jī)具有良好的調(diào)速性能,控制簡單、效率高及優(yōu)異的動(dòng)態(tài)特性、使用壽命長等優(yōu)點(diǎn),因而在航空航天、數(shù)控機(jī)床、機(jī)器人、電動(dòng)汽車、和家用電器等方面都獲得了廣泛應(yīng)用。直流電機(jī)的調(diào)速方案一般有以下3種方式:(1)改變電樞電壓;(2)改變激磁繞組電壓;(3)改變電樞回路電阻[1]。
本文以MC9S12XS128單片機(jī)為系統(tǒng)控制的核心,驅(qū)動(dòng)采用LM298雙H橋直流電機(jī)驅(qū)動(dòng)模塊,并用光電碼盤檢測(cè)并反饋電機(jī)的實(shí)際速度,組成了一個(gè)小型的直流電機(jī)閉環(huán)調(diào)速系統(tǒng)。實(shí)驗(yàn)結(jié)果表明,該控制系統(tǒng)能夠?qū)崿F(xiàn)自動(dòng)調(diào)速,具有響應(yīng)速度快,抗干擾性高等特點(diǎn),可以在實(shí)際生產(chǎn)和生活中廣泛應(yīng)用[2]。
1 硬件電路設(shè)計(jì)
1.1 系統(tǒng)總體方案設(shè)計(jì)
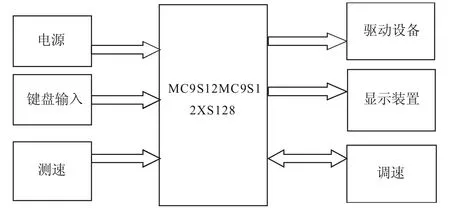
圖1 控制系統(tǒng)框圖Fig.1 Block diagram of control system
本文以MC9S12XS128作為控制器,設(shè)計(jì)了鍵盤模塊,用以設(shè)定電機(jī)轉(zhuǎn)速。通過鍵盤輸入模塊設(shè)定轉(zhuǎn)速將信號(hào)傳遞給控制器,控制器輸出相應(yīng)的PWM信號(hào)給驅(qū)動(dòng)模塊,調(diào)節(jié)電機(jī)轉(zhuǎn)動(dòng)的轉(zhuǎn)速,測(cè)速模塊實(shí)時(shí)地對(duì)電機(jī)進(jìn)行測(cè)速,測(cè)得的數(shù)值實(shí)時(shí)的再反饋到控制器,控制器的數(shù)值與鍵盤輸入值進(jìn)行比較,形成閉環(huán)控制系統(tǒng),根據(jù)比較結(jié)果,應(yīng)用PID控制算法,使電機(jī)的實(shí)際轉(zhuǎn)速與設(shè)定值相等或無限接近[3]。
本文采用LM298雙H橋直流電機(jī)驅(qū)動(dòng)模塊,并用光電碼盤檢測(cè)并反饋電機(jī)的實(shí)際速度,組成了一個(gè)小型的直流電機(jī)閉環(huán)調(diào)速系統(tǒng)。采用脈寬調(diào)制PWM控制技術(shù),對(duì)直流電機(jī)進(jìn)行調(diào)壓調(diào)速控制[4-5]。為了實(shí)現(xiàn)電機(jī)調(diào)速的穩(wěn)定性和快速性,應(yīng)用了PID控制算法。系統(tǒng)的結(jié)構(gòu)框圖如圖1所示。
1.2 驅(qū)動(dòng)控制電路設(shè)計(jì)
驅(qū)動(dòng)控制電路的采用驅(qū)動(dòng)芯片LM298來組成H橋,LM298的5、7、10、12引腳為四路PWM輸入端口,分別用來控制兩個(gè)電機(jī),本文只需要用到1路即選用5、7引腳輸入PWM加以控制;6、11引腳分別為兩組PWM輸出的使能端;8腳接地,9腳接5V電源為驅(qū)動(dòng)芯片提供電源,4腳接電機(jī)驅(qū)動(dòng)電壓;2、3、13、14引腳為兩組PWM輸出接。本設(shè)計(jì)主要由占空比控制電壓值大小。通過調(diào)節(jié)占空比,占空比越大,則電壓值越大,電機(jī)的轉(zhuǎn)速增加,相反則電機(jī)的轉(zhuǎn)速越慢,從而實(shí)現(xiàn)PWM對(duì)電機(jī)的調(diào)速。驅(qū)動(dòng)電路如圖2所示。
1.3 測(cè)速電路設(shè)計(jì)
電機(jī)測(cè)速傳感器采用光碼盤和光電對(duì)管相互配合實(shí)現(xiàn)。光電對(duì)管輸出的脈沖信號(hào)與單片機(jī)的計(jì)算器接口PT7連接,用以計(jì)數(shù)。由于光電對(duì)管輸出的脈沖型號(hào)相位相差九十度,波形相同,所以可以利用相位和電機(jī)的正反轉(zhuǎn)相對(duì)應(yīng)。當(dāng)電機(jī)正傳時(shí),后一個(gè)脈沖落后前一個(gè)脈沖九十度,電機(jī)反轉(zhuǎn)時(shí)就好相反,后一個(gè)脈沖則超前前一個(gè)脈沖九十度。在實(shí)際電路中,只檢測(cè)了一路脈沖信號(hào),通過它的頻率測(cè)量得到電機(jī)的轉(zhuǎn)速。電機(jī)的轉(zhuǎn)向是通過施加在電機(jī)上的電壓正負(fù)進(jìn)行判斷的。在紅外發(fā)光對(duì)管和紅外接收對(duì)管之間有一個(gè)100線的光電碼盤,碼盤固定在電機(jī)軸承上,光電碼盤隨著電機(jī)的轉(zhuǎn)動(dòng)而轉(zhuǎn)動(dòng),信號(hào)線會(huì)輸出轉(zhuǎn)速脈沖,這時(shí)可以根據(jù)主控芯片PT7口的輸入捕捉,假設(shè)記錄1s內(nèi)脈沖信號(hào)的上升/下降沿的個(gè)數(shù)為N,對(duì)脈沖數(shù)進(jìn)行處理(N/100)*60即得到一分鐘內(nèi)電機(jī)的轉(zhuǎn)速,這就實(shí)現(xiàn)了電機(jī)測(cè)速的功能[6]。
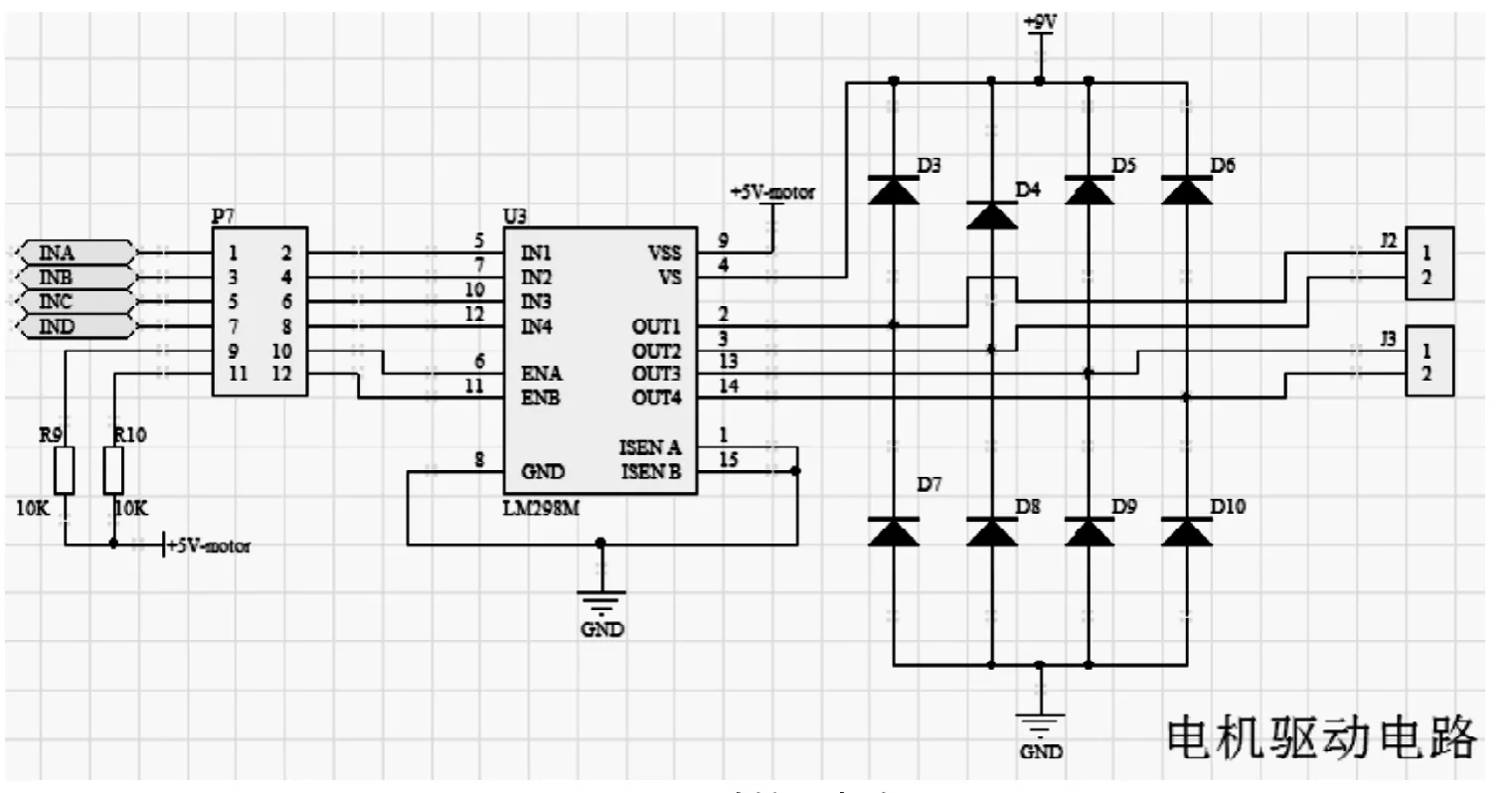
圖2 驅(qū)動(dòng)控制電路Fig.2 Drive control circuit
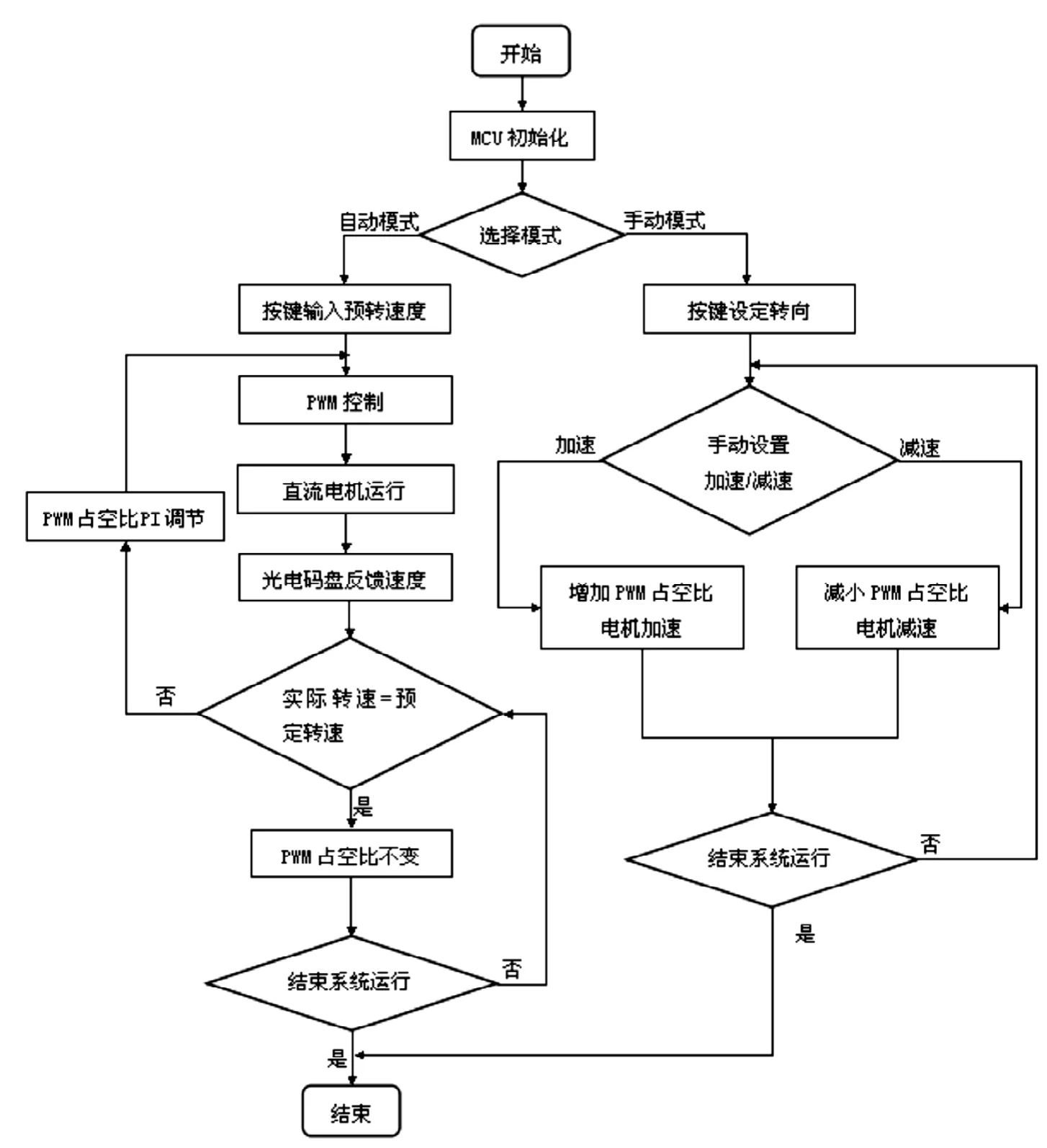
圖3 主程序流程圖Fig.3 Main program flow chart
2 軟件設(shè)計(jì)
2.1 軟件程序設(shè)計(jì)
系統(tǒng)啟動(dòng)后,由按鍵選擇系統(tǒng)運(yùn)行模式,總共有兩種模式,即自動(dòng)模式和手動(dòng)模式。
當(dāng)選擇手動(dòng)模式時(shí),液晶屏提示轉(zhuǎn)向設(shè)置,默認(rèn)為正轉(zhuǎn),設(shè)定后按S17確認(rèn)鍵,初始化后驅(qū)動(dòng)電機(jī)PWM占空比為0,即電機(jī)停止。這時(shí)可以通過加速按鍵或減速按鍵調(diào)節(jié)PWM占空比對(duì)電機(jī)進(jìn)行加減速控制。
當(dāng)選擇自動(dòng)模式時(shí),液晶屏將提示輸入預(yù)轉(zhuǎn)速度,由于電機(jī)的驅(qū)動(dòng)電壓及本身功率限制,其轉(zhuǎn)速范圍在600-5700之間,因此設(shè)定的預(yù)轉(zhuǎn)速要在這個(gè)范圍之內(nèi)。當(dāng)設(shè)定預(yù)轉(zhuǎn)速后MC9S12XS128單片機(jī)對(duì)預(yù)轉(zhuǎn)速和光電碼盤反饋的實(shí)際速度進(jìn)行比較,若兩者之間無偏差,則占空比及轉(zhuǎn)速均不變;若有偏差則通過調(diào)節(jié)占空比來調(diào)節(jié)轉(zhuǎn)速值,直到偏差為零或接近于零。主要原理是:當(dāng)實(shí)際速度大于設(shè)定值時(shí),就調(diào)節(jié)占空比使之變小,則電機(jī)電壓變小,實(shí)際速度減小接近于設(shè)定值;反之,調(diào)節(jié)占空比,使之增大,電機(jī)兩端電壓增大,實(shí)際速度增大,接近或等于設(shè)定值。通過實(shí)時(shí)比較,PID控制算法,使電機(jī)的實(shí)際速度和設(shè)定值相等或是在設(shè)定值附近,實(shí)現(xiàn)電機(jī)速度穩(wěn)定在設(shè)定值。
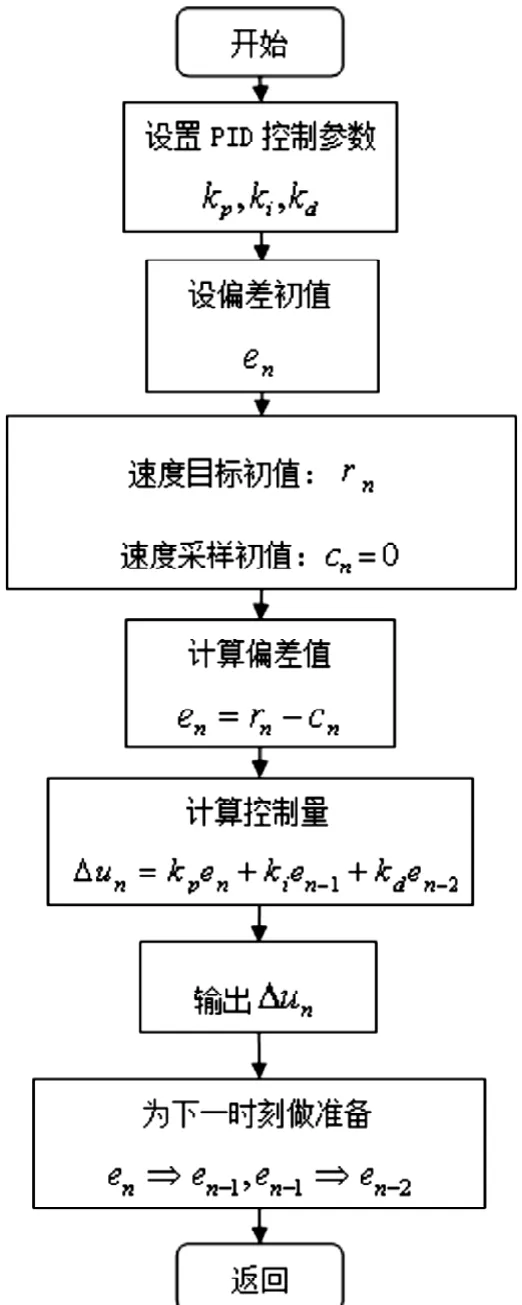
圖4 PID控制流程圖Fig.4 PID control flow chart
主程序流程圖如圖3所示。
2.2 增量式PID控制算法
本設(shè)計(jì)采用的是增量式PID控制算法,相對(duì)于位置式算法,增量式PID算法只需計(jì)算增量,當(dāng)存在計(jì)算誤差或精度不足時(shí),對(duì)控制量計(jì)算的影響較小[7]。
PID控制流程圖如圖4所示。
3 結(jié)語
本文閉環(huán)直流電機(jī)調(diào)速系統(tǒng),通過設(shè)置預(yù)設(shè)轉(zhuǎn)速的大小,使電機(jī)自動(dòng)的調(diào)節(jié)到預(yù)設(shè)的轉(zhuǎn)速。實(shí)現(xiàn)了系統(tǒng)對(duì)電機(jī)的調(diào)速、速度顯示等功能。用Nokia5110實(shí)時(shí)顯示實(shí)際速度和預(yù)設(shè)轉(zhuǎn)速,驅(qū)動(dòng)模塊的驅(qū)動(dòng)電機(jī)的轉(zhuǎn)速正常,發(fā)熱量不大,在12V電源下最高可以使電機(jī)的轉(zhuǎn)速達(dá)到5700轉(zhuǎn)/min。
MC9S12XS128系統(tǒng)控制芯片的運(yùn)作效果良好,通過單片機(jī)產(chǎn)生PWM信號(hào),便于設(shè)計(jì)中對(duì)電機(jī)的轉(zhuǎn)速進(jìn)行控制,調(diào)節(jié)占空比的大小,使電機(jī)達(dá)到預(yù)設(shè)值。系統(tǒng)采用了PID控制算法,實(shí)踐證明PID控制算法滿足直流電機(jī)自動(dòng)調(diào)速功能,調(diào)速效果穩(wěn)定。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36