基于車載式視頻圖像的車輛行駛速度鑒定
2021-04-21 14:15:52董浩存聶中國
汽車實用技術 2021年7期
董浩存,聶中國
基于車載式視頻圖像的車輛行駛速度鑒定
董浩存1,聶中國2
(1.沈陽理工大學,遼寧 沈陽 110159;2.沈陽佳實司法鑒定所,遼寧 沈陽 110023)
文章論述了基于車載式視頻圖像鑒定道路交通事故中目標車輛行駛速度的基本原理,提出一種依據射影幾何學中的交比不變性原理測算目標車輛行駛距離的算法。該算法可以避免因車輛運動軌跡與視頻攝錄設備鏡頭光學軸線不垂直而產生的誤差,從而提高了目標車輛行駛速度鑒定的精確度。最后根據一個真實案例,探討了用車載式視頻圖像進行車輛行駛速度鑒定的方法、步驟以及主要注意事項,可為評價這一鑒定方法的準確性和科學性提供參考。
道路交通事故;車速鑒定;車載式視頻圖像;攝影測量;交比
引言
道路交通事故司法鑒定的關鍵項目之一,是事故發生瞬間目標車輛行駛速度的鑒定,這是確定事故性質、分析事故原因、認定事故責任的重要依據。近年來,由于在機動車安全運行管理中的法律地位逐步提高,越來越多的各類車載式視頻攝錄設備被廣泛使用[1],道路交通事故發生的過程以及事故車輛速度的大小和變化,經由視頻圖像都可得以直觀地再現和反映,使得基于車載式視頻圖像進行道路交通事故中目標車輛行駛速度的鑒定具備了充分的客觀條件。由于這種方法不考慮事故現場的痕跡和物品分布,且起點與終點之間的距離較近,又靠近肇事地點,因此,在道路交通事故司法鑒定的目標車輛行駛速度鑒定中具有一定的實用價值[2-3],是車輛行駛速度鑒定案例中比例較大的技術途徑,已經成為道路交通事故中車輛行駛速度鑒定的重要技術手段[4]。因此,對基于車載式視頻圖像進行車輛行駛速度鑒定的方法、步驟以及主要注意事項進行探討是很有必要的。
1 車載式視頻圖像計算車速的基本原理
1.1 用視頻圖像計算車速的基本原理


目標車輛的行駛距離S,就不一定可由視頻圖像上經簡單計算輕易得到。當目標車輛運動軌跡垂直于視頻攝錄鏡頭的光學軸線、平行于成像平面時,可以依據圖上尺寸與實際尺寸成正比的關系,經計算得到準確的目標車輛行駛距離S。但由于在道路交通事故中,目標車輛運動軌跡往往并不垂直于視頻攝錄鏡頭的光學軸線,而是成一拍攝角度,這時采用圖上尺寸與實際尺寸成正比的關系計算得到的車輛行駛距離S就會與真實距離有誤差[5-8],當目標車輛的行駛速度無限逼近交通規定值時,這誤差的影響就極其關鍵了,往往決定著道路交通事故的性質,是不容忽視的。因此,在存在著拍攝視角的視頻圖像上測算目標車輛行駛距離S時,應依據射影幾何學中的交比不變性原理來計算,以避免拍攝視角的存在而引起的誤差,得到真實準確的目標車輛行駛距離S,獲得更加符合實際情況的車輛行駛速度鑒定結果。
1.2 射影幾何學中的交比不變性原理
一條三維空間直線上,有A、B、C、D四個點,如圖1所示,定義A點和B點為基礎點,C點和D點為分隔點。

圖1 交比示意圖
由分隔點和基礎點確定的兩個有向線段之比稱為簡比R,記為:
一條直線上四個點中兩個簡比之比即為交比K,圖1中A、B、C、D四點的交比為:
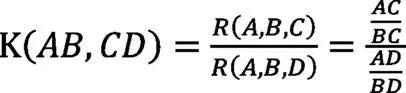
共線四點的交比,具有這樣的性質:任意兩條直線截同一線束所得四條直線的交比相等,這就是射影幾何學中的交比不變性。

交比,是射影幾何學中的不變量,點列的交比的幾何意義是有關角的正弦之比或三角形面積之比,與直線之間有無角度無關,也就是說,任意平面內共線四點在射影后(圖像上)尺寸的交比,與射影前(實際中)尺寸的交比相等,因此,在車載式視頻圖像上采用交比不變性原理計算目標車輛的行駛距離,可以避免因目標車輛運動軌跡與視頻攝錄設備鏡頭光學軸線不垂直、存在拍攝視角而產生的誤差,得到的鑒定結果會更加準確。實際操作中要注意,需要選取三個與目標車輛運動軌跡平行且在同一直線上的車輛特征點或道路環境參照物,并且在同一直線上的這三個點或物對應的現實中的實際間距應為已知。
2 基于車載式視頻圖像鑒定車輛行駛速度案例
2.1 案情簡介及分析
一輛小型白色客車在道路上行駛,交警部門要求利用位于其右后方、同方向行駛車輛拍攝到的車載式視頻圖像,鑒定小型白色客車的行駛速度。
由于載有視頻攝錄設備的車輛距離小型白色客車較遠且兩輛車的行駛速度不同,故需要以安裝有車載式視頻攝錄設備車輛的行駛速度,間接求出目標車輛即小型白色客車的行駛速度。
測定車載式視頻圖像的幀速率f=30幀/秒,在車輛行駛的路面上,第1車行道與第2車行道之間劃有白色車行道分界虛線,分界虛線中的白色實線長度L=4.0,分界虛線中前一條實線的尾端與下一條實線的首端之間的間隔長度L=40(見圖3),目標車輛的軸距=2.8,目標車輛的后懸L=1.2。
2.2 計算載有視頻攝錄設備車輛的行駛速度V1
在時間顯示為19:16:59秒的第0幀視頻圖像上,于 1車行道與2車行道之間的車行道分界虛線中的一段白色實線段前端設置一根虛擬參照線(見圖3),將該虛擬參照線疊加到19:16:59秒的第3幀視頻圖像上,并找到這根虛擬參照線與路面上1、2車行道之間分界線的交點B,B點所在這段分界線中白色實線的前端為A、后端為C,C點之后分界線間隔的后端為D(見圖3)。由視頻圖像上測得A、B、C、D四點的交比1為:
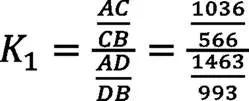
如果載有視頻攝錄設備的車輛在n=3-0=3幀的時間間隔內在路上的實際行駛距離為1,根據交比定律可得:
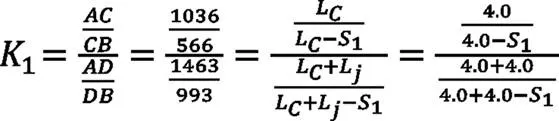
解得:1=1.31
載有視頻攝錄設備車輛的行駛速度1為:

2.3 計算目標車輛與載有視頻攝錄設備車輛之間的相對速度V2
在時間顯示為19:16:59秒的第0幀視頻圖像上,于目標車輛即小型白色客車的右前輪與地面交點處設置一個虛擬參照點F,并將該虛擬參照點F疊加到19:16:59秒的第3幀視頻圖像上(見圖3),找到目標車輛右前輪與地面交點E、目標車輛右后輪與地面交點G,以及目標車輛車身右后角在地面的投影點H,由視頻圖像上測得E、F、G、H四點的交比2為:
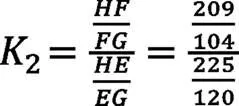
如果目標車輛即小型白色客車相對于載有視頻攝錄設備的車輛在n=3-0=3幀的時間間隔內在路上的實際行駛距離為2,根據交比定律可得:

可解得:2=0.8
目標車輛與載有視頻攝錄設備車輛之間的相對速度2為:

2.4 計算目標車輛即小型白色客車的行駛速度V10
因為載有視頻攝錄設備的車輛位于小型白色客車后方且同方向行駛,因此:

鑒定意見:小型白色客車的行駛速度為76。
3 鑒定中的注意事項
3.1 選擇視頻圖像需要注意的事項
(1)首先,根據視頻圖像判斷目標車輛的運動情況,若其行駛軌跡曲折多彎不易確定,那么此鑒定方法要謹慎采用,視具體情況或者可以將目標車輛的行程截斷分為連續的多個小路段分別進行分析計算。
(2)視頻攝錄鏡頭的顫抖和搖擺,都會導致道路環境參照物在視頻圖像中的位置發生很大變動,在此情況下很難確定虛擬參照點或線通過道路環境參照物的時間間隔,因此利用車載式視頻圖像計算車速時,必須選擇無顛簸、無搖擺的視頻片段作為依據。
(3)所截取的視頻圖像關注區域的畫面,要能夠清晰地顯示出目標車輛的外觀特征和行駛軌跡,能夠有效地選取或設定參照物。
3.2 選取和設定參照物的注意事項
所要鑒定的車輛行駛速度,是目標車輛在道路交通事故發生時的瞬時速度,其誤差的主要來源就是車輛行駛“距離”的測量[8],選取合適的參照物,可以增加特征點與參照物的重合度,減少目標車輛行駛距離的測量誤差,提高鑒定結果的準確性。
(1)選取的道路環境參照物,應當與目標車輛的距離比較近,且與目標車輛的運動方向平行。
(2)虛擬參照物的設定,應便于確定目標車輛通過該空間位置所用的時間,宜將虛擬參照物設定在與目標車輛上某一特征點、或者是道路環境參照物某一邊緣線或端點重合的位置。
(3)如果需要通過道路環境參照物的距離來計算目標車輛在整數幀內的實際行駛距離,必須在虛擬參照物即將通過或剛剛通過最后一個道路環境參照物的視頻圖像中,能觀測到所選取的三個或兩個道路環境參物。
(4)用圖上尺寸與實際尺寸成正比的關系計算目標車輛在整數幀時間內的實際行駛距離時,應盡量選擇虛擬參照物將要或剛剛通過第2個目標車輛特征點或道路環境參照物處的整數幀來計算,這樣可以最大限度地避免因拍攝視角造成的測算誤差。
(5)如果在整數幀視頻圖像中出現目標車輛特征點位置超前或滯后于道路環境參照物而不是恰好重合,車輛行駛時間不是整數倍的單位幀時間的情形,可以采用幀間差分法精確計算。
4 結束語
實踐表明,基于車載式視頻圖像的道路交通事故中目標車輛行駛速度鑒定方法,是最直觀的交通事故再現、分析驗證和參數獲取的好方法,尤其是對于那些事故現場沒有輪胎印跡、無散落物、無車輛碰撞印痕等的道路交通事故中目標車輛行駛速度的鑒定,這一方法具有重要的實際應用價值[9-10]。而后提出的依據射影幾何學中的交比不變性原理,測算目標車輛行駛距離的算法,可以避免因車輛運動軌跡與視頻攝錄設備鏡頭光學軸線不垂直而產生的誤差,提高行駛距離測算的精準度,提高行駛速度計算結果的精確度,從而提高車輛行駛速度鑒定結果的準確性和科學性,對道路交通事故中目標車輛行駛速度的鑒定有著重要的意義。
[1] 李啟明.道路交通事故分析發展研究[J].汽車實用技術,2020(04): 240-241.
[2] 尹國祥.基于視頻圖像的肇事車輛車速鑒定[J].江西警察學院學報, 2012(02):124-125.
[3] 韓學源,金先龍,張曉云,苗新強.基于視頻圖像與直接線性變換理論的車輛運動信息重構[J].汽車工程,2012,34(12):1145-1149.
[4] 馮浩,方建新,陳建國,潘少猷,張志勇,張澤楓.道路交通事故速度重建技術現狀[J].中國司法鑒定,2014(06):68-71.
[5] Hao-cun DONG,Zhong-guo NIE. Analysis on Error in Vehicle Speed Identification Based on Video Images[A]. Science and Engineering Research Center.Proceedings of 2017 3rd International Conference on Applied Mechanics and Mechanical Automation(AMMA2017) [C].Science and Engineering Research Center:Science and Engine -ering Research Center,2017:7.
[6] 何烈云.直接線性變換法在車載式視頻圖像車速測算中的應用[J].中國人民公安大學學報(自然科學版),2018,24(04):78-82.
[7] 張喆,代雪晶.視頻圖像在實際交通肇事案件領域中的應用[J].遼寧省交通高等專科學校學報,2016,18(04):21-22.
[8] 賈常明,吳文龍,王乾,王永第,王玉樂.視頻方法鑒定車速的準確性研究[J].刑事技術,2020,45(02):160-164.
[9] 袁泉,張高強,郭銳,李一兵.交通事故車速分析理論方法的研究進展[J].交通運輸工程與信息學報,2009,7(02):21-27.
[10] 邵祖峰,楊紅,王秀華.車速鑒定的交通事故現場取證技術研究[J].湖南警察學院學報,2012,24(02):119-122.
Vehicle speed identification based on the videos recorded by mobile video recorder
Dong Haocun1, Nie Zhongguo2
( 1.Shenyang Ligong University, Liaoning Shenyang 110159; 2.Shenyang Jiashi Judicial identification Office, Liaoning Shenyang 110023 )
In this paper, we discoursed the basic principle of speed identification of the target vehicle based on the videos recorded by mobile video recorder in a road traffic accident, and further, proposed an algorithm for estimating the driving distance of the target vehicle according to the principle of projective invariant in the projective geometry. The algorithm can avoid the error caused by the movement trajectory of the target vehicle and non-verticality of the lens optical axis of the video recorder, so as to improve the accuracy of the target vehicle speed identification. In addition, we applied our proposed algorithm to a real case to discuss the method, procedure, and main attentions in the identification for the speed of the target vehicle involved in a traffic accident using a mobile video recorder, which can be a reference for evaluating the accuracy and scientific validity of the proposed identification method.
Road traffic accident; Vehicle speed identification; Video recorded by mobile video recorder; Photogram -metry; Cross-ratio
10.16638/j.cnki.1671-7988.2021.07.061
U491.3
A
1671-7988(2021)07-195-04
U491.3
A
1671-7988(2021)07-195-04
董浩存,就職于沈陽理工大學。