針對自適應巡航的駕駛人風格辨識
2021-04-21 14:15:28郭叢帥
汽車實用技術 2021年7期
郭叢帥
針對自適應巡航的駕駛人風格辨識
郭叢帥
(長安大學汽車學院,陜西 西安 710064)
車輛進入自適應巡航工況下行駛時,不同風格的駕駛人會對自適應巡航控制系統(Adaptive Cruise Control, ACC)有不同的需求。文章首先通過對不同駕駛人在9種跟隨試驗下獲取的實驗數據分析,選取表征駕駛人風格的駕駛特征參數;其次對所有駕駛人駕駛特征參數利用K-mean算法聚類分析,將駕駛人三類,并利用BP神經網絡建立辨識模型對駕駛人風格進行辨識。結果表明;文章提出的方法可以較高的準確率對駕駛人風格進行分類,提高自適應巡航系統適應駕駛人的能力。
駕駛人風格;自適應巡航;聚類分析;BP神經網絡
前言
駕駛員行為特性反映了駕駛人長期習慣或規律性的駕駛操作方式,主要由駕駛人駕駛水平、駕齡、自身性格等因素決定[1]。Yi等人通過采集實際駕駛人行為特征數據,基于具有遺傳因子的遞歸最小二乘法在駕駛人駕駛階段識別駕駛人特性參數,并在自動控制階段實時應用了識別結果[2];Tricot等人從駕駛輔助系統的適應性出發,招募39名實驗者在開展駕駛試驗,收集大量駕駛數據,同時根據駕駛員對不同工況下期望的駕駛輔助功能,完成對駕駛員的分類[3]。石京等人采用K-中心聚類的方法將駕駛人分為謹慎性駕駛人、普通型駕駛人和激進型駕駛人3類[4]。劉志鵬也通過實車試驗對采集多位駕駛員數據,對駕駛特征參數進行提取,對數據聚類分析獲得三類駕駛員駕駛特征參數,并通過神經網絡模型對駕駛員類別進行離線和在線辨識[5]。駕駛員行為特性研究對于提高駕駛員輔助駕駛系統對駕駛人風格的適應程度具有重要作用[6],針對ACC進行駕駛人風格分類對于提高自適應巡航系統具有重要意義。
1 駕駛人風格分類
1.1 駕駛人特征參數
車頭時距TH可以有效反映駕駛人穩態跟車行為。碰撞時間倒數TTCi可以反映駕駛人對跟車時危險情況的判斷程度。同時,由于停車間距作為駕駛人駕駛特征參數之一,并且也是安全距離模型建立的重要參數,反應了不同風格駕駛人的期望停車距離,對ACC控制器的建立起著重要作用[7]。綜合上述分析,本文選取駕駛人每次試驗中進入穩態跟隨階段的跟車時距TH、穩態跟車后首次制動時刻碰撞時間倒數TTCi和停車間距d作為駕駛人駕駛特性特征值。
1.2 數據獲取
本文通過實車實驗進行9種跟隨工況(如表1 所示)測試,實驗對象為男性16人,女性6人,共22人,年齡分布在24-36歲,駕齡分布在1~11年,分別實驗采集實驗數據。試驗工況示意圖如圖1所示。
表1 實驗跟隨工況

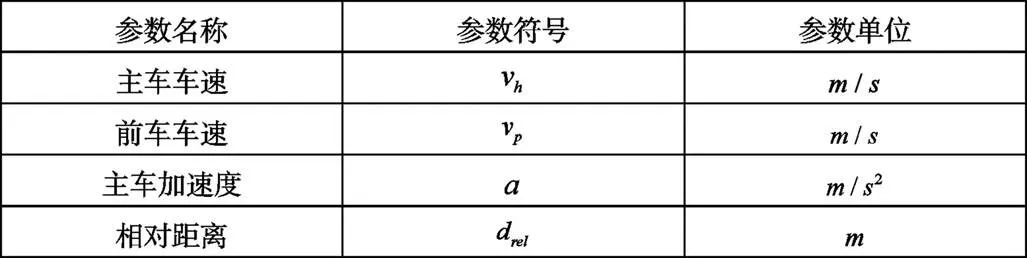
駕駛數據采集參數具體情況如表2所示。
表2 駕駛數據采集內容
1.3 分類方法
通過數據挖掘不同風格駕駛人之間的差異,采用聚類分析的方法將駕駛人分為謹慎型,適中型和激進型三類。由于對駕駛人跟車特性類別沒有可參考的經驗知識,本文選取K-mean算法進行聚類分析。
從聚類結果可以看出,三類駕駛人特征參數數據雖然有少量重疊,但整體可將三類駕駛人進行劃分,如圖2所示。其中,謹慎型駕駛人的停車間距和碰撞時間倒數TTCi較小,穩態跟車時距TH較大;激進型駕駛人則相反,停車間距和碰撞時間倒數較大,穩態跟車時距TH較小。而適中型駕駛人這三個特性參數介于謹慎型駕駛人和激進型駕駛人之間。即謹慎型駕駛人偏向于高跟車時距、低碰撞時間倒數以及高停車間距;激進型駕駛人則偏向低跟車時距、高碰撞時間倒數、低停車間距。適中型駕駛人各參數值介于二者之間。聚類所得結果和各風格駕駛人駕駛特性較為一致,聚類中心如表3所示。
表3 不同風格駕駛人特征參數聚類中心

2 駕駛人風格辨識模型
本文利用BP神經網絡作為辨識模型,駕駛人風格主要通過獲取駕駛特征參數進行辨識,特征參數中碰撞時間倒數TTCi和車間時距TH可通過實時獲取自車車速、相對車速和相對距離計算獲得,因此將其作為BP神經網絡辨識模型的輸入量。本文駕駛人特性辨識模型采用三層BP神經網絡,其結構如圖3所示。

圖3 BP神經網絡結構圖
實驗共收集198組帶有標簽的駕駛人行為特征參數,隨機選取其中70%的數據作為神經網絡訓練集,其余30%的數據作為測試集,以驗證所訓練的神經網絡模型的辨識效果。本文設計的BP神經網絡訓練如圖4所示,由圖可知訓練過程較快,在經過18次迭代后達到訓練目標。驗證結果如圖5所示。訓練后輸出結果分別對應謹慎型駕駛人、適中型駕駛人和激進型駕駛人。BP神經網絡配置參數如表4所示。
表4 BP神經網絡配置參數

訓練誤差收斂曲線如圖4所示。
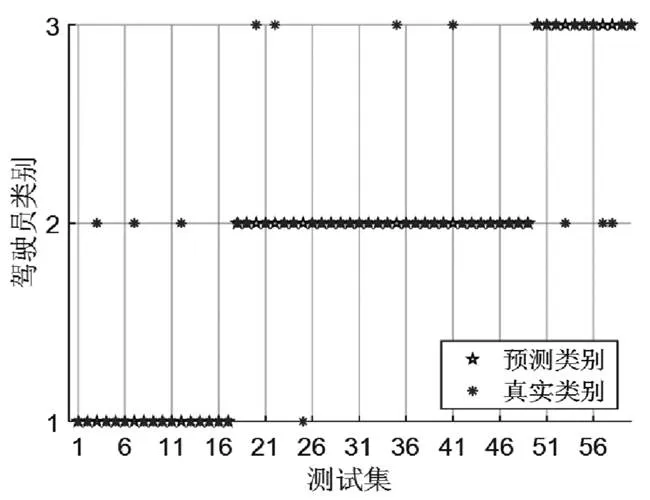
圖5 測試集測試結果
驗證集測試結果如圖5所示,謹慎型駕駛人辨識準確率、適中型駕駛人辨識準確率和激進型駕駛人辨識準確率分別為82.4%,84.4%,72.7%,平均辨識準確率為81.7%。在實際采樣過程中可通過設置采樣時間在有效工況內獲取大量樣本進行辨識的方法,以提高辨識準確率。
3 結論
本文對針對自適應巡航系統對駕駛人風格進行了分類,劃分為激進型駕駛人、一般型駕駛人和謹慎性駕駛人三類,并建立了BP神經網絡對駕駛人進行風格辨識,可以81.7%的準確率辨識駕駛人風格,對于提高自動巡航系統適應駕駛人并提高輔助駕駛性能具有重要意義。
[1] 蘇琛.考慮駕駛員駕駛習性的汽車縱向智能輔助駕駛系統研究[D].長春:吉林大學.
[2] Yi K,Moon I K.A driver-adaptive stop-and-go Cruise control strategy [C]//Networking,Sensing and Control,2004 IEEE International Con -ference on. IEEE,2004.
[3] Tricot N,Rajaonah B,Pacaux M P,et al.Toward a modelization of drivers behaviour in different traffic situations for the design and the evaluation of advanced cooperative systems[C]//IEEE Intelligent Vehicles Symposium. IEEE,2003.
[4] 石京,柳美玉.基于駕駛模擬實驗的駕駛風格對高速公路換道行為的影響[J].東南大學學報(自然科學版)2017(5):1041.
[5] 劉志鵬.基于駕駛人駕駛習性的個性化自適應巡航控制系統研究[D].長春:吉林大學.
[6] 劉賀.考慮駕駛員風格的汽車縱向控制策略研究[D].長沙:湖南大學,2018.
[7] 初建圳.考慮駕駛人風格的自適應巡航控制策略研究[D].西安:長安大學,2020.
Driver Style Recognition for Adaptive Cruise
Guo Congshuai
(School of Automobile, Chang'an University, Shaanxi Xi'an 710064)
Drivers of different styles will have different requirements for the adaptive cruise control (ACC) system when the vehicle enters the adaptive cruise mode. This paper analyzes the following data of different drivers at different speeds, and selects driving characteristic parameters that characterize the driver's style. The K-mean algorithm cluster analysis is used for all drivers' driving characteristic parameters, and the three types of drivers are used to establish an identification model to identify the driver's style using BP neural network. The results show that the method proposed in this paper can classify the driver's style with higher accuracy and improve the adaptive cruise system's ability to adapt to the driver.
Driver style; Adaptive cruise; Cluster analysis; BP neural network
10.16638/j.cnki.1671-7988.2021.07.010
U495
A
1671-7988(2021)07-27-03
U495
A
1671-7988(2021)07-27-03
郭叢帥,就讀于長安大學汽車學院。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03