面向資料同化的風廓線雷達風場特征分析及其質控方法
2021-04-16 07:34:18王葉紅張偉趙玉春
大氣科學 2021年1期
關鍵詞:質量
王葉紅 2, 張偉 趙玉春
1 廈門市氣象局廈門市海峽氣象開放重點實驗室,廈門 361012
2 中國科學院大氣物理研究所大氣科學和地球流體力學數值模擬國家重點實驗室(LASG),北京 100029
3 高原與盆地暴雨旱澇災害四川省重點實驗室,成都 610072
1 引言
風廓線雷達利用湍流大氣對雷達電磁波的散射作用,探測空氣運動的多普勒效應信號,可以反演出測站上空探測高度范圍內時間(數分鐘)與空間分辨率(幾十米間距)均較高的大氣水平風速、風向、垂直速度、大氣折射率結構常數等氣象要素的垂直廓線資料,可極大彌補常規探空觀測時空密度不足的缺陷。此外,與多普勒天氣雷達以降水粒子為示蹤物,對于無降水粒子的大氣測不出大氣流場的局限性相比,風廓線雷達是以大氣折射指數(湍流塊)為示蹤物,可以測量出邊界層到中層大氣的流場,其探測的主要對象是晴空或多云大氣,對降水天氣也有一定的探測能力。美國國家海洋大氣局(NOAA)評估結果表明,風廓線雷達的時間和空間分辨率較高,可以展示出大氣波動等天氣系統的連續詳實變化過程(Benjamin et al., 2004b)。風廓線雷達無人值守、可全天候和全天時工作的特點,以及可獲得連續、客觀、定量監測的優勢,使其越來越多地受到世界各國的重視,并被廣泛應用于各個領域(Bluestein and Speheger, 1995; Muschinski et al., 1999; Bouttier, 2001; 何平, 2006; Zhang et al.,2016; 廖菲等, 2017)。
從20 世紀80 年代美國建立風廓線雷達網以來(Strauch et al., 1984; Frisch et al., 1986),日 本、歐洲相繼建立了自己的風廓線雷達網。我國也從20 世紀80 年代開始陸續開展風廓線雷達組網建設(馬大安等, 1989; 顧映欣和陶祖鈺, 1991, 1993),截止2016 年底,我國已投入業務使用的有83 部,目前中國氣象局規劃到2025 年將組建一個覆蓋我國全境的225 部風廓線雷達網(張小雯等, 2017)。風廓線雷達在大氣風場觀測(王志春和植石群,2014)、大氣湍流結構研究(Muschinski et al., 1999;阮征等, 2008)、中尺度天氣結構研究(Bluestein and Speheger, 1995; Trexler and Koch, 2000)、中小尺度天氣系統監測和預警(何平, 2006; 古紅萍等,2008; 周志敏等, 2010; 董保舉等, 2012)以及災害性氣象服務(何平等, 2009; 汪學淵等, 2013)等方面發揮越來越重要的作用。
風廓線雷達在數值天氣預報中的作用也受到世界各國的廣泛關注,并已在歐洲中期天氣預報中心(ECMWF)(Bouttier, 2001)、美國國家環境預報中心(NCEP)快速更新循環預報系統(RUC)(Benjamin et al., 2004a)、日本氣象廳(JMA)(Kuo et al., 1987; Ishihara et al., 2006)、加拿大氣象中心(CMC)等國外主要全球數值預報業務系統先后實現了風廓線雷達資料在模式中的業務同化,并對模式預報性能的提高有正面影響。我國也在近年逐步開展了風廓線雷達資料的同化應用研究(張勝軍等, 2004; 李妙英等, 2013; 余貞壽等, 2018),取得了一定進展。張旭斌等(2015)針對廣東地區13部風廓線雷達水平風產品,采用經驗正交函數(EOF)分析方法進行質量控制研究,并將質控后的資料同化到GRAPES_3DVAR 同化系統中,使短期降水預報得到了明顯改善。譚曉偉等(2016)通過觀測系統模擬試驗(OSSEs)對我國擬建風廓線雷達觀測網內的不同類型風廓線雷達觀測資料在GRAPES_MESO 數值預報系統中的可能影響進行了研究,提出了選型建議。
總的來說,目前我國對風廓線雷達資料的同化研究還很不充分,特別是與其密切相關的資料質量分析和質量控制研究。朱立娟(2015)對2015 年5 月實時上傳至國家氣象信息中心國家級氣象資料存儲檢索系統(MDSS)的28 部風廓線雷達產品按照P 波段對流層風廓線雷達PA 和PB 型號、L波段邊界層風廓線雷達LC 型號分別進行了面向資料同化的水平風產品質量分析,指出不同型號雷達水平測風質量相差較大,其中LC 邊界層風廓線雷達質量最差。李紅莉等(2013)將未經質量控制的LC 邊界層風廓線雷達資料進行同化,增加了初始風場的誤差;張旭斌等(2015)同化質控后的LC 邊界層風廓線雷達風場資料,明顯改善了短期降水預報。可見風廓線雷達產品質量分析和質量控制是實現其在數值模式中有效應用的關鍵。風廓線雷達探測水平風質量不僅與雷達型號有關,還受到徑向速度觀測值準確程度與均勻風假設條件等諸多因素的影響,同一型號雷達是否會由于選址不同而受到電磁干擾、地物回波等客觀因素影響以及受不同天氣系統影響而使不同雷達站水平測風質量產生較大差異值得關注。針對小范圍組網的每一部雷達詳細開展水平測風在不同高度上的、有無降水等不同天氣條件下的質量分析,一方面可為業務應用提供參考依據,另一方面,也可為制定差異化的風廓線雷達水平測風質控方案提供參考依據。
截止2018 年8 月福建省已建成并業務使用15部L 波段風廓線雷達,在彌補常規高空探測網時空密度上的不足、加強對天氣系統的識別和中小尺度災害性天氣的監測等方面發揮了重要作用(汪學淵等, 2015; 曾瑾瑜等, 2017)。然而,如何充分有效地發揮福建風廓線雷達資料在數值預報模式中的同化應用,開展面向資料同化的質量分析和質量控制研究至關重要,鑒于此,本文對福建風廓線雷達水平風產品進行詳細的質量分析,為科學合理的質量控制方案及業務同化應用提供科學依據,并為后期同化研究打下一定基礎。
2 資料與方法
2.1 風廓線雷達資料
截止2018 年,福建共有15 部L 波段風廓線雷達投入業務使用,其中3 部(福鼎、晉江、秀嶼)于2017 年11 月之后陸續建成投入使用。本文對2017 年全年數據完整的12 部風廓線雷達(武夷山、永安、福清、建甌、羅源、武平、建寧、連城、德化、平潭、平和、翔安,其中福清為移動風廓線雷達)進行面向資料同化的水平風場質量分析(圖1)。這12 部雷達時間分辨率均為6 min。武夷山、永安、福清為L 波段CFL-03 系列邊界層風廓線雷達,起始和終止探測高度分別為60 m 和7080 m,武夷山和永安在600 m 高度以下以60 m 垂直分辨率進行觀測(低模),之上則以120 m 垂直分辨率進行觀測(高模);福清站低模和高模探測的銜接高度則為840 m。其余9 部雷達為L 波段CFL-06 系列低對流層風廓線雷達,起始和終止探測高度分別為150 m 和10110 m,在4110 m 高度以下均以120 m垂直分辨率進行觀測,之上則以240 m 垂直分辨率進行觀測。為便于比較,將福清在600~840 m 間比武夷山和永安多的660 m 和780 m 兩層數據忽略,即在后續統計中,武夷山、永安、福清探測高度完全一致,其余9 站探測高度完全一致。需要說明的是,這12 部雷達均為頻率在1300 MHz 左右的L波段雷達,為了達到更高的探測高度,CFL-06 系列的9 部雷達在探測中進行了功率加強,其探測高度通常可以達到6~8 km,強降水等天氣條件下可以在10 km 高度獲得數據,達到了低對流層雷達的最大探測高度。為區別于P 波段低對流層風廓線雷達(頻率在440~450 MHz、最大探測高度8 km),這里將通過加強功率增加探測高度的CFL-06 系列的9 部雷達稱為L 波段低對流層風廓線雷達。

圖1 福建省風廓線雷達站點分布(WYS、YA、FQ、JO、LY、WP、JN、LC、DH、PT、PH、XA 分別代表武夷山、永安、福清、建甌、羅源、武平、建寧、連城、德化、平潭、平和、翔安,數字為各風廓線雷達站海拔高度)Fig.1 Locations of wind-profiler radars in Fujian Province (WYS, YA, FQ, JO, LY, WP, JN, LC, DH, PT, PH, and XA indicate wind-profiler radars in Wuyishan, Yongan, Fuqing, Jianou, Luoyuan, Wuping, Jianning, Liancheng, Dehua, Pingtan, Pinghe, and Xiang’an, respectively. The values in meters indicate the altitudes)
按照資料采樣收集頻率,風廓線雷達資料可分為實時采樣數據、半小時平均數據和小時平均數據,朱立娟(2015)研究發現,小時平均數據的平均偏差和離散度都要小于實時采樣數據,前者在小時平均處理過程中濾除了大氣湍流瞬時的波動,而該部分信息恰好是資料同化中無法反映的代表性誤差,因此,針對資料同化應用,采用小時平均采樣數據相對更為恰當。本文分析的水平風產品為廠家可信度標識達到100%的小時平均采樣風數據,該數據為前一小時資料的平均。
2.2 數值天氣預報背景場資料
采用的數值天氣預報背景場資料為美國國家環境預報中心全球預報系統(National Centers for Environmental Prediction/Global Forecast System,NCEP/GFS)一 日4 次(00 時、06 時、12 時、18 時,協調世界時,下同)0.5°×0.5°分析資料,垂直方向從1000 hPa 至10 hPa 共26 個等壓面層。為了與GFS 背景場資料時間相匹配,選用相同時刻(00 時、06 時、12 時、18 時)的風廓線雷達小時平均風數據。另外,因為風廓線雷達資料為站點等高度面資料,而GFS 資料為格點等壓面資料,因此,需進行空間一致性匹配,將GFS 資料空間插值到風廓線雷達水平風所在位置(其中垂直位置為風廓線雷達站海拔高度加上各探測高度),包括水平方向插值和垂直方向插值,其中水平方向采用雙線性插值,垂直方向上首先將GFS 資料各等壓面層上的位勢高度轉換為幾何高度,然后線性插值到風廓線雷達資料所在高度上。鑒于每部風廓線雷達站海拔高度不同,因而盡管相同系列雷達的探測高度一致,但探測水平風所在實際高度并不相同,為繪圖和分析方便起見,后文所指高度均為各雷達站探測高度,而非水平風所在實際高度。
3 風廓線雷達水平風資料獲取率分析
數據獲取率是定量評估風廓線雷達探測能力的一項重要指標,其定義為:各高度上,實際獲取的有效數據量與應獲得的數據總量之比(胡明寶等,2008)。福建12 部風廓線雷達水平風2017 年全年平均的數據獲取率如圖2 所示,可見同一部雷達資料獲取率在不同探測高度上不盡相同,總體趨勢為獲取率在邊界層和對流層低層較高,接近1,而在其上隨高度增加而逐漸減小;另外,不同系列雷達間、相同系列不同雷達間數據獲取率也存在較大差異。
CFL-03 系列的武夷山、永安、福清3 部雷達數據獲取率均表現為從底層至某一高度層(武夷山、永安和福清分別為1800 m、2520 m 和1920 m)保持在0.95 以上,隨高度變化不明顯;而在此高度之上,則隨高度增加而逐步減小至最低的0.2 左右。在1800 m 高度以上,三者數據獲取率逐漸出現顯著差異,其中永安最高,福清次之,武夷山最低;其差異在3840 m 處達到最大,永安和武夷山的數據獲取率分別為0.78 和0.32,兩者相差0.46。

圖2 福建風廓線雷達水平風數據獲取率Fig.2 Availability of horizontal winds detected by wind-profiler radars in Fujian Province
CFL-06 系列的建甌、羅源、武平、建寧、連城、德化、平潭、平和及翔安9 部雷達數據獲取率具有如下特征:(1)與CFL-03 系列雷達類似,CFL-06 系列的9 部雷達數據獲取率也表現出從底層至某一高度層保持在0.95 以上,隨高度變化不明顯;而在此高度之上,則隨高度增加而逐步減小至最低的0.2 左右。這一高度在2910 m(德化)至3630 m(翔安)之間,普遍高于CFL-03 系列雷達。(2)這9 部雷達數據獲取率隨高度減小這一趨勢均在低、高模探測銜接高度4110 m 處出現中斷,該層數據獲取率較其緊鄰的3990 m 高度層上的數值平均偏大0.08 左右。該現象在圖2 中表現為數據獲取率廓線在3990 m 與4110 m 之間折向左側的尖角,這與風廓線雷達在3990 m 以下采用短脈沖發射(低模式)發射能量小、在4110 m 及其上采用長脈沖發射(高模式)發射能量大這兩種工作模式有關。同時注意到,在CFL-03 系列的3 部雷達中,數據獲取率廓線在低模向高模轉換的高度層并未出現“折角”現象,這與其低、高模兩種探測模式銜接高度(武夷山和永安為600 m、福清為840 m)遠較CFL-06 系列的4110 m 低、因而風廓線雷達回波信號在600 m(840 m)高度減弱不明顯有關。(3)4110 m 高度之上CFL-06 系列的9 部雷達再次呈現數據獲取率隨高度增加而減小的特征,并在9390 m 高度以上減小趨勢變緩。(4)CFL-06 系列不同雷達間數據獲取率相差也很大,德化明顯低于其余8 部雷達,在4110 m 高度以下及以上翔安和平潭則分別略有優勢。總體上,CFL-06系列雷達數據獲取率的差異(最大相差0.2)遠小于CFL-03 系列雷達間的差異(最大相差0.46)。
可見,與CFL-03 系列雷達相比,CFL-06 系列雷達不僅探測高度更高,而且除1.8 km 高度以下兩者數據獲取率相差不大外,在1.8 km 以上的相同高度層,其數據獲取率顯著高于前者。
按照有效數據獲取率0.8 對應的高度為風廓線雷達有效探測高度(何平等, 2009),各雷達站有效探測高度不盡相同(表1),其中武夷山、福清最低,分別為2400 m 和2760 m;永安次之,為3720 m;其余9 站有效探測高度在5070~6510 m,德化最低,平潭最高。
4 風廓線雷達水平風質量分析
4.1 風廓線雷達水平風誤差特征
4.1.1 散點分布特征
不考慮有效探測高度、有無降水影響等因素,分別考察福建12 部風廓線雷達水平風產品相對GFS 背景場的誤差分布特征。圖3 所示為2017 年風廓線雷達探測u 風(記為uo)相對于GFS 背景場(記為ub)的散點分布,可見12 部雷達u 風誤差特征主要表現為:(1)散點分布的最基本特征為沿對角線成棒槌型分布。(2)各站均存在偏離對角線嚴重的點,分布特征不盡相同。總體而言,翔安、永安、武平u 風誤差相對較小,散點基本沿對角線分布,偏離對角線嚴重的點明顯少于其他站;而福清、建甌、羅源、建寧、連城、德化、平潭、平和在uo=0 m s?1附近存在明顯“污染帶”現象,表現為ub為較強西風,而uo卻在0 m s?1附近;武夷山則在ub=0 m s?1附近出現了較多異常偏差點。福清資料最差,棒槌型分布特征最不明顯,“零污染帶”現象最為顯著,異常偏差點明顯偏多。(3)棒槌型散點沿對角線分布并不完全對稱,普遍偏向于ub一側,說明ub大于uo的情況明顯多于其小于uo的情況。因此,風廓線雷達u 風相對背景場存在明顯系統性負偏差,小于背景場,不滿足資料同化對背景場的無偏需求,需進行偏差訂正。可將各風廓線雷達站u 風速均值作為偏差訂正值,各測站原始數據減去各自的偏差訂正值即可。

表1 基于水平風數據獲取率閾值(0.8)的福建風廓線雷達有效探測高度Table 1 Effective detection altitude of Fujian wind-profiler radars based on the threshold (0.8) of horizontal wind availability
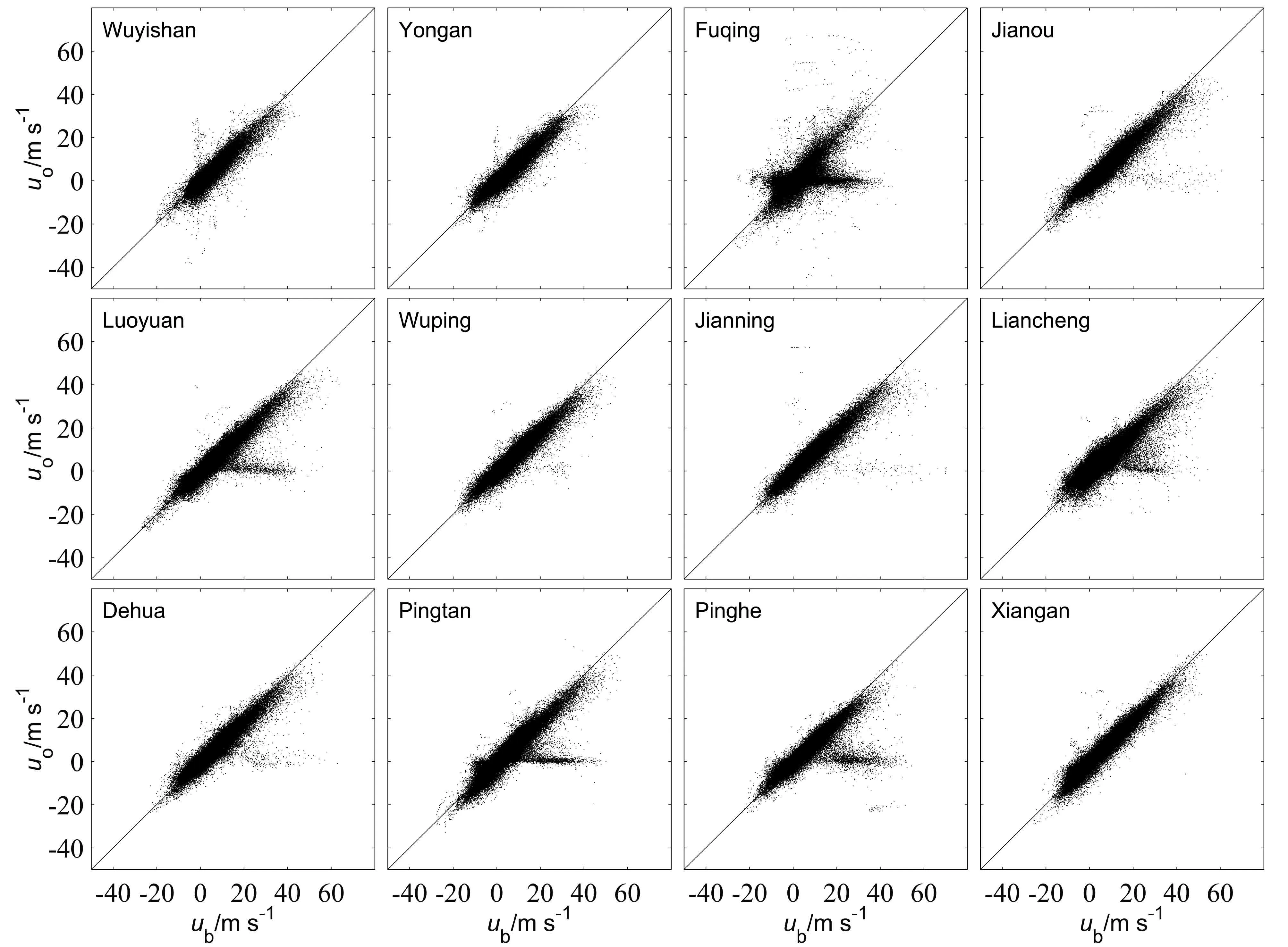
圖3 風廓線雷達u 風速(uo)與GFS 背景場(ub)散點分布Fig.3 Scatterplots of u-wind speed detected by wind-profiler radars (uo) against GFS background (ub)
圖4 所示為2017 年風廓線雷達探測v 風分量(記為vo)相對于GFS 背景場(記為vb)的散點分布,可見v 風誤差的主要特征也表現為散點基本沿對角線分布,各站也有明顯偏離對角線的點,但數量和偏離程度都遠小于u 風分量,其中福清和武夷山在vb=0 m s?1附近出現了 “污染帶”現象,但不顯著。綜合而言,v 風質量優于u 風。朱立娟(2015)在研究中指出風廓線雷達探測u 風和v 風與數值預報背景場相比在0 風速附近都出現了較多異常偏差點。本文進一步研究發現,u 風“零污染帶”現象明顯甚于v 風,且該現象不是在每部雷達中均出現,如翔安和永安等探測質量較好的雷達站,在u、v 風的0 風速附近均未出現較集中的異常偏差點。
定量統計各雷達站探測u、v 風相對GFS 背景場的標準差,可見各雷達站測風質量存在極大差異。CFL-03 系列的3 部風廓線雷達中,永安風廓線雷達探測水平風場質量相對最優,u(v)風標準差為2.72 m s?1(2.95 m s?1);武夷山次之,u(v)風標準差為3.69 m s?1(3.70 m s?1);福清最差,u(v)風標準差高達7.34 m s?1(5.13 m s?1)。CFL-06 系列的9 部風廓線雷達中,翔安風廓線雷達探測水平風場質量相對最優,u(v)風標準差為2.73 m s?1(2.58 m s?1);武平次之,u(v)風標準差為2.86 m s?1(2.78 m s?1);建甌、建寧、德化、羅源、平潭、平和、連城依次再次之,u(v)風標準差范圍為3.36~5.42 m s?1(2.76~4.66 m s?1)。因此,綜合而言,翔安和永安風廓線雷達測風質量相對最優,武平次之,建甌、建寧、德化、羅源、平潭、平和、連城依次再次之,福清最差。福清風廓線雷達測風質量遠差于其他雷達站,可能與其是移動式風廓線雷達,雷達性能參數不同有關,其中雷達探測五波束方向與其他雷達極大不同:其余雷達均為垂直方向波束指向天頂方向,即垂直方向波束與鉛垂線夾角為0°,東西、南北方向波束與鉛垂線的夾角對稱;而福清雷達垂直方向波束則偏離天頂方向,因而其垂直方向波束與鉛垂線夾角不為0°,東西、南北方向波束與鉛垂線的夾角并不對稱,東西向不對稱程度甚于南北向。此外,對各時次風廓線雷達探測和GFS 背景場水平風的垂直廓線及其在不同等高面上的水平分布進一步考察后發現,風廓線雷達探測水平風存在較大偏差的時次,往往大氣在風廓線雷達探測的水平范圍內是不均勻的,此時已不符合風廓線雷達計算水平風的均勻的假設條件,因此改進非均勻水平風條件下的風廓線雷達水平風產品的反演算法,可能是提高風廓線雷達水平風產品質量的關鍵環節。

圖4 風廓線雷達v 風速(vo)與GFS 背景場(vb)散點分布Fig.4 Scatterplots of v-wind speed detected by wind-profiler radars (vo) against GFS background (vb)
4.1.2 資料偏差隨高度分布特征
為進一步分析風廓線雷達水平風產品相對數值預報背景場的偏差在垂直方向上的分布特征,考察了12 部風廓線雷達探測u 風相對于GFS 背景場的偏差分布散點圖(圖5),發現不同雷達站u 風偏差隨高度的分布特征具有極大差異。
武夷山、永安和福清為同一系列雷達,但u 風偏差隨高度的分布卻差異極大。永安u 風偏差值在各高度分布比較均勻,偏差絕對值大于10 m s?1的異常點相對較少,并主要集中在600 m 以下的邊界層。武夷山站偏差較大的點則相對永安有所增加,特別是在600 m 以下低層和6720 m 以上的高層,后者偏差值異常大,極大值超過?60 m s?1。因此,可以確定圖3 中武夷山站偏離對角線的點主要位于這兩個高度層。圖3 中福清站偏離對角線的散點相對較多,從圖5 偏差隨高度分布可見這些異常點分布于各高度,其極大值達±70 m s?1左右。此外,永安和武夷山站u 風偏差相對集中于±10 m s?1范圍內,而福清站偏差則集中于?40~20 m s?1范圍內。因此可見,盡管上述3 個雷達站系列相同,但測風質量卻相差很大,相較而言,永安質量最佳,武夷山次之,而福清最差。

圖5 風廓線雷達u 風速(uo)與GFS 背景場(ub)偏差垂直分布Fig.5 Vertical distributions of u-wind speed bias of wind-profiler radar products (uo) against GFS background (ub)
建甌、羅源、武平、建寧、連城、德化、平潭、平和及翔安同為L 波段CFL-06 系列雷達,同樣的,其u 風質量也相差很大。與圖3 所示的翔安站u 風散點基本沿對角線分布特征一致,其偏差隨高度分布相對均勻,異常點較少(圖5),主要分布于1.5 km 以下及7~9 km,異常程度比其他測站小得多,在這9 部雷達中測風質量最優。武平次之,其偏差異常點主要集中在5~7.5 km 高度上,主要為負異常偏差,正是該范圍內的負異常偏差點造成了圖3 武平站uo風在0 風速附近的“污染帶”現象。德化與武平比較類似,但異常點有所增多,集中分布在5~9 km 高度上,也主要為負異常偏差,這些負異常偏差點引起了圖3 中德化站uo風在0 風速附近的“污染帶”現象。而建寧、建甌、羅源、平潭、連城、平和站u 風異常偏差點則依次增加得更多,導致其uo風在0 值附近“污染帶”現象的異常偏差點則依次分布在4.5~10 km、4~10 km、3.5~10 km、4~7.5 km、4~10 km 及4~10 km 高度上。其中平和站是該系列9 部雷達中測風質量最差的,其異常偏差點最多,值相對較大,可達?70 m s?1的負偏差。此外,建寧、建甌、羅源和平潭均在1.5 km 高度以下存在相對集中的正偏差異常點,而這些異常點則對應于圖3 中各雷達站對角線上方偏離對角線的那些點。
總體而言,除翔安、永安各層u 風偏差相差不大,未出現比較集中的偏差異常點之外,其余10 個站均有不同程度的偏差異常點,其分布高度、偏差異常程度不盡相同,并且高層偏差普遍大于低層的。
同樣的,對v 風偏差隨高度的分布特征也進行了考察(圖6),發現各雷達站探測的v 風分量出現較大偏差的資料數明顯少于u 風分量,且未呈現高層偏差顯著大于低層的特點,也即整體而言風廓線雷達探測的v 風與模式背景場的偏差要明顯小于u 風的。對不同雷達站而言,則有所差異。與u風類似,在相同系列的武夷山、永安和福清雷達中,永安雷達測風質量相對最優,偏差異常點明顯少于其他2 部雷達,福清依然為最差,并可判斷其在圖4 中偏離對角線的點主要分布在3~4 km,極大值可達±60 m s?1。而在另外9 部系列相同的雷達中,翔安雷達探測v 風質量最優,偏差范圍窄,集中分布在?10~10 m s?1;而連城雷達偏差分布范圍較廣,異常偏差點多,且高層偏差程度甚于低層。

圖6 風廓線雷達v 風速(vo)與GFS 背景場(vb)偏差垂直分布Fig.6 Vertical distributions of v-wind speed bias of wind-profiler radar products (vo) against GFS background (vb)
4.1.3 資料偏差概率密度分布
圖7 給出了12 部風廓線雷達u 風與GFS 背景場在所有高度層上差值的概率密度分布,可見各雷達u 風偏差概率密度分布均呈鐘型,中間高,兩端逐漸下降,左右不完全對稱,左側直方柱在其底部明顯高于右側。差值大部分集中在0 m s?1附近,其中永安、建寧、武平、平和4 部雷達u 風差值在0 m s?1附近的概率密度相對較大,其值在18.18%至17.95%;翔安、建甌、武夷山、羅源4 部雷達相對次之,其值在17.41%至17.02%;德化雷達再次之,占16.08%,上述9 部雷達u 風差值概率密度分布呈現出鐘型分布高聳的特征,其絕對值大于4 m s?1的差值相對較少,約占9.09%(翔安)~13.11%(羅源)。而平潭、連城和福清雷達u風差值在0 m s?1附近的概率密度僅為13.19%、11.36%和8.64%,鐘型分布較永安等9 部雷達依次變得更加低矮、寬平,其絕對值大于4 m s?1的差值概率密度則依次增加到18.84%、23.42%和39.38%。
與u 風類似,各雷達v 風差值概率密度分布(圖8)也均呈鐘型,中間高,兩端逐漸下降,但與u 風差值概率密度分布左側直方柱在其底部明顯高于右側不同,v 風差值概率密度分布左右大致對稱。v 風差值也大部分集中在0 m s?1附近,除福清站v 風差值在0 m s?1附近的概率為12.22%,較其u 風差值概率的8.64%增大較明顯外,其余雷達站v 風差值在0 m s?1附近的概率與其u 風差異不大。
綜上可見,福建12 部風廓線雷達u 風偏差不完全滿足資料同化所需的正態分布需求,而v 風則相對較好。因此,做好各雷達站水平風資料的質量控制,使其滿足正態分布必須加以考慮。
4.1.4 相關系數與標準差
圖9 給出了福建12 部風廓線雷達探測的u 風速與GFS 背景場的相關系數和標準差隨高度的分布,可以更加直觀和定量地反映各雷達站在不同高度上的水平測風質量,由圖可見不同雷達站u 風相關系數和標準差廓線分布差異很大,具體表現為如下特征:

圖7 風廓線雷達u 風速(uo)與GFS 背景場(ub)差值的概率密度分布Fig.7 Probability density distributions (PDF) of differences between u-wind speed detected by wind-profiler radars (uo) and GFS background (ub)
武夷山站從最低層至6600 m 高度u 風標準差在2.1~4.3 m s?1,而在6720 m 以上的4 個高度層,其標準差從6.88 m s?1迅速增加到19.835 m s?1,可見,武夷山站u 風偏差異常主要位于6720 m 高度以上。武夷山720 m 高度以下標準差雖然不大(最大3.171 m s?1),但相關系數相對較小(其值范圍為?0.04~0.62),而且越接近地面其值越小,說明該范圍內風廓線雷達探測的u 風風向與背景場可能存在不協調,而之所以在標準差上表現不明顯則可能因為低層風速小,即使出現風向的反向也不會帶來較大的風速誤差。為驗證這一推斷,普查了武夷山站風廓線雷達探測水平風與GFS 背景場的分布,發現在720 m 高度以下的邊界層,確實較常出現兩者風向不協調甚至反向的情況,而此時兩者的風速都相對較小,因此風速誤差并不大。通常在進行資料同化時,一般會將觀測背景差絕對值大于3~5倍觀測誤差(往往以觀測資料的標準差作為觀測誤差)的數據作為“壞”數據剔除掉(仲躋芹等,2017),而對于此類數據,雖然其風向反向但風速較小,其觀測背景差往往并未超出3~5 倍觀測誤差的范圍,因而無法將其剔除。但結合相關系數的統計,則可以將該高度范圍列為不可靠數據高度而予以剔除。在840~6600 m 高度上,武夷山站相關系數較高,標準差較小,u 風數據可信度較高;而在6720 m 以上相關系數小、標準差大,u 風數據可信度較低。
翔安站測風數據質量最優,除最低層u 風相關系數小于0.8(其值為0.735)外,其余各層相關系數在0.81~0.99,除最高層10110 m 標準差為5.21 m s?1相對較大外,其余層次u 風的標準差在1.91~4.1 m s?1,表明翔安站整層數據的可信度相對較高。而福清站測風數據質量相對最差,u 風的相關系數范圍為?0.02~0.75,標準差范圍為3.71~14.99 m s?1。因此,福清站整層數據的可信度均較差,而這些數據均是通過了廠家質檢達到可信度100%的數據,很顯然,在未經過進一步質量控制的情況下,該站數據質量并不理想,應謹慎使用。
相對而言,永安風廓線雷達探測u 風相對較好,其標準差從最低層到6720 m 取值范圍為1.64~3.60 m s?1,僅在6840 m 及其上3 個高度層標準差略大,分別為4.73、4.57、5.69 m s?1;永安站960 m高度以下相關系數較低(其值范圍為0.07~0.66),在其上相關系數相對較大(其值范圍為0.71~0.97)。武平雷達探測u 風的相關系數和標準差的廓線分布與永安較為類似,其標準差除在最高層10110 m 達4.99 m s?1相對較大外,其余各層u 風的標準差在1.47~4.35 m s?1;類似地,武平站u風相關系數也在低層較低,630 m 高度以下相關系數較小(取值范圍為0.178~0.641),在其上相關系數較大(其值范圍為0.70~0.98)。

圖8 風廓線雷達v 風速(vo)與GFS 背景場(vb)差值的概率密度分布Fig.8 Probability density distributions of differences between v-wind speed detected by wind-profiler radars (vo) and GFS background (vb)
建甌、羅源、建寧、連城、德化、平潭、平和各站u 風相關系數和標準差的廓線分布各不相同,但總體特征為:低層標準差不大,但相關系數卻較小;在其上一定高度范圍內標準差相對較小、相關系數相對較大(大于0.8);而在超過這一高度層后,標準差急劇加大、相關系數迅速減小。標準差相對較小而相關系數相對較大的高度范圍在不同雷達站不盡相同。如果以相關系數大于0.7 和標準差小于4.5 m s?1作為u 風探測資料可信度較高的層次,那么建甌、羅源、建寧、連城、德化、平潭、平和各雷達站所在的層次分別為1110~6030 m、390~3990 m、750~7710 m、870~3750 m、510~4830 m、270~4110 m、510~5070 m。

圖9 風廓線雷達u 風速與GFS 背景場相關系數(實線)與標準差(虛線,單位: 10 m s?1)的垂直分布Fig.9 Vertical distributions of standard deviations (dashed line, units: 10 m s?1) and correlations (solid line) between u-wind speed detected by windprofiler radars and GFS background
特別注意到,12 部風廓線雷達探測的1 km 以下邊界層內水平風與背景場的相關系數均明顯低于其他層次,并在最低層達到極小值。這不難理解,一方面,因為越靠近地面,風的不均勻性越強,并且受地面遮擋物的影響更大,亂流現象也更為突出;另一方面,GFS 的模式地形可能對低層風場特別是邊界層風有較大影響,因而風廓線雷達探測水平風與模式背景場的相關系數相對差于高層。為了探究不同雷達對低層風的探測能力的差異,表2 給出了福建12 部風廓線雷達探測的最低層水平風與模式背景場的相關系數分布(鑒于CFL-03 系列雷達探測最低層高度為60 m,低于CFL-06 系列雷達的150 m,為便于對比,同時給出了相近高度層180 m 處的結果),可以發現如下特點:
(1)CFL-06 系列雷達探測的低層u 風相關系數明顯大于CFL-03 系列雷達,前者9 部雷達探測150 m 高度u 風的相關系數范圍為0.146~0.735,而后者探測60 m 高度u 風的相關系數僅為?0.022~0.066,將探測高度增加到180 m 其相關系數也僅為?0.023~0.144。CFL-03 系列的3 部雷達中既有海拔超過200 m 的測站(武夷山、永安),也有51.9 m 海拔較低的雷達站(福清),而CFL-06 系列中也均有與之海拔接近的雷達站,因此該結果的得出已考慮了海拔的影響。不同雷達對低層v 風探測能力相對u 風而言差異減小。因此,總體而言,CFL-03 系列雷達低層測風能力不及CFL-06 系列雷達。
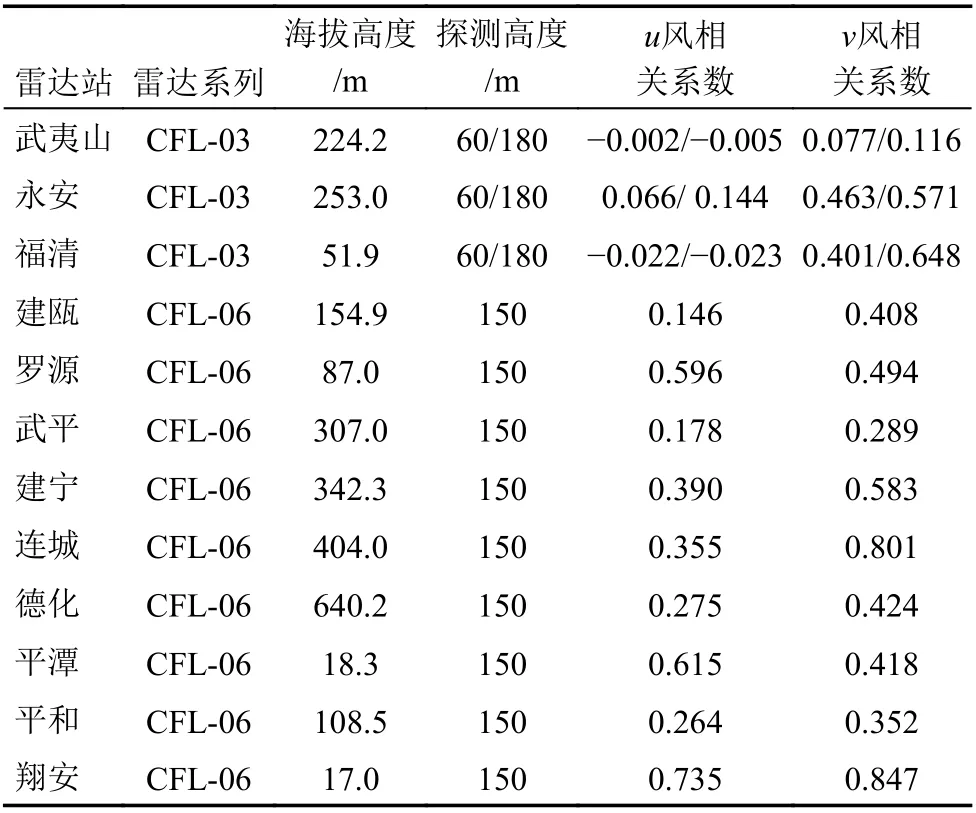
表2 福建風廓線雷達探測最低層水平風與GFS 背景場的相關系數Table 2 Correlations of horizontal winds in the lowest level detected by Fujian wind-profiler radars with GFS background
(2)翔安風廓線雷達探測低層風與模式背景場的相關(u、v 風相關系數分別為0.735 和0.847,均為最高)明顯優于其他雷達站,這一方面得益于翔安站位于我國東南沿海,低層風向風速較內陸地區變化更為均勻,而另一方面,則因其雷達良好的性能。注意到,平潭站亦為海島站,其地理位置、海拔高度與翔安接近,且雷達系列相同,但無論低層風場的相關系數、整層數據的標準差和相關系數、散點分布特征,平潭站都遠不及翔安站。
與福建12 部風廓線雷達探測u 風與模式背景場的相關系數和標準差廓線分布所呈現出的多種分布形態不同,v 風相關系數和標準差的廓線分布特征則相對簡單(圖10),各雷達站相關系數和標準差的垂直廓線除邊界層低層外,呈現出明顯的近似對稱特征,即當相關系數較小(大)時,標準差則相對較大(小)。在邊界層低層,與u 風一樣,也表現為標準差較小、而相關系數相對較小的特征。翔安站則例外,從低層到高層,v 風相關系數和標準差的變化幅度相對較小,在低層相關系數也較大,達0.732。福清和連城對v 風的探測在12 部雷達中依然最差,標準差從低層到高層增加明顯,而其他雷達從低層到高層v 風標準差變化的趨勢明顯小得多。整體而言,v 風探測質量優于u 風。
4.2 有、無降水風廓線雷達水平風特征
4.2.1 資料獲取率
風廓線雷達的探測高度除了與雷達技術指標有關之外,受天氣狀況的影響很大。當有天氣系統過境、高空水汽增加時,伴有探測高度明顯增加現象(李晨光等, 2003; 汪學淵等, 2013),降水期間風廓線雷達水平風平均探測高度可以增高2 km 以上(何平等, 2009),而強降水的強度與最大探測高度和增幅呈現出正相關的特征(陳紅玉等, 2016)。
為了進一步確定福建12 部風廓線雷達在有、無降水不同大氣條件下的探測能力,對兩種大氣條件下的風廓線雷達水平測風分別進行統計分析,其中有降水定義為:在統計時刻的前、后3 h 之間地面觀測有降水;其余樣本則為無降水。圖11 為有、無降水不同大氣條件下分別統計的各站資料獲取率,可見:福建12 部風廓線雷達均表現為從最底層至某一高度層有降水時的數據獲取率小于無降水時,而在此高度之上,有降水時的資料獲取率則顯著大于無降水時。各雷達有、無降水時數據獲取率相對大小發生轉變的這一高度層不盡相同,差異較大,CFL-03 系列的3 部雷達武夷山、永安、福清分別為1500 m、2700 m 和2200 m,而CFL-06 系列的9 部雷達在3100 m(連城)至4500 m(羅源)之間。進一步分析發現,有降水時風廓線雷達探測高度明顯增加,在相同數據獲取率下,有降水時探測高度一般會增加2~3 km,這與何平等(2009)研究結果一致。何平等(2009)解釋了降水天氣下風廓線雷達探測水平風產品高度明顯增加的兩個可能原因:一是降水天氣來臨時,高層水汽含量增加,使得折射率結構常數加大,從而導致探測高度增加;另外,降水天氣來臨時,高層出現冰晶等粒子,易于產生有效的粒子散射信號,從而被雷達檢測到。
4.2.2 標準差
圖12 給出了福建12 部風廓線雷達與模式背景場的u 風速在有、無降水條件下以及所有樣本下的標準差隨高度的分布情況,可見,對永安、武平和翔安站而言,有、無降水u 風速標準差廓線有差異,但相對其余9 部雷達而言小得多,差異一般在±1.5 m s?1范圍內,在多數層次表現為有降水時的標準差略大于無降水時。而基于所有樣本統計的標準差廓線則介于有、無降水兩者之間,并更接近于無降水時的廓線分布。這不難理解,因為12 部雷達有降水的樣本數在總樣本數中占比僅為6.5%~14.8%,遠低于無降水的。
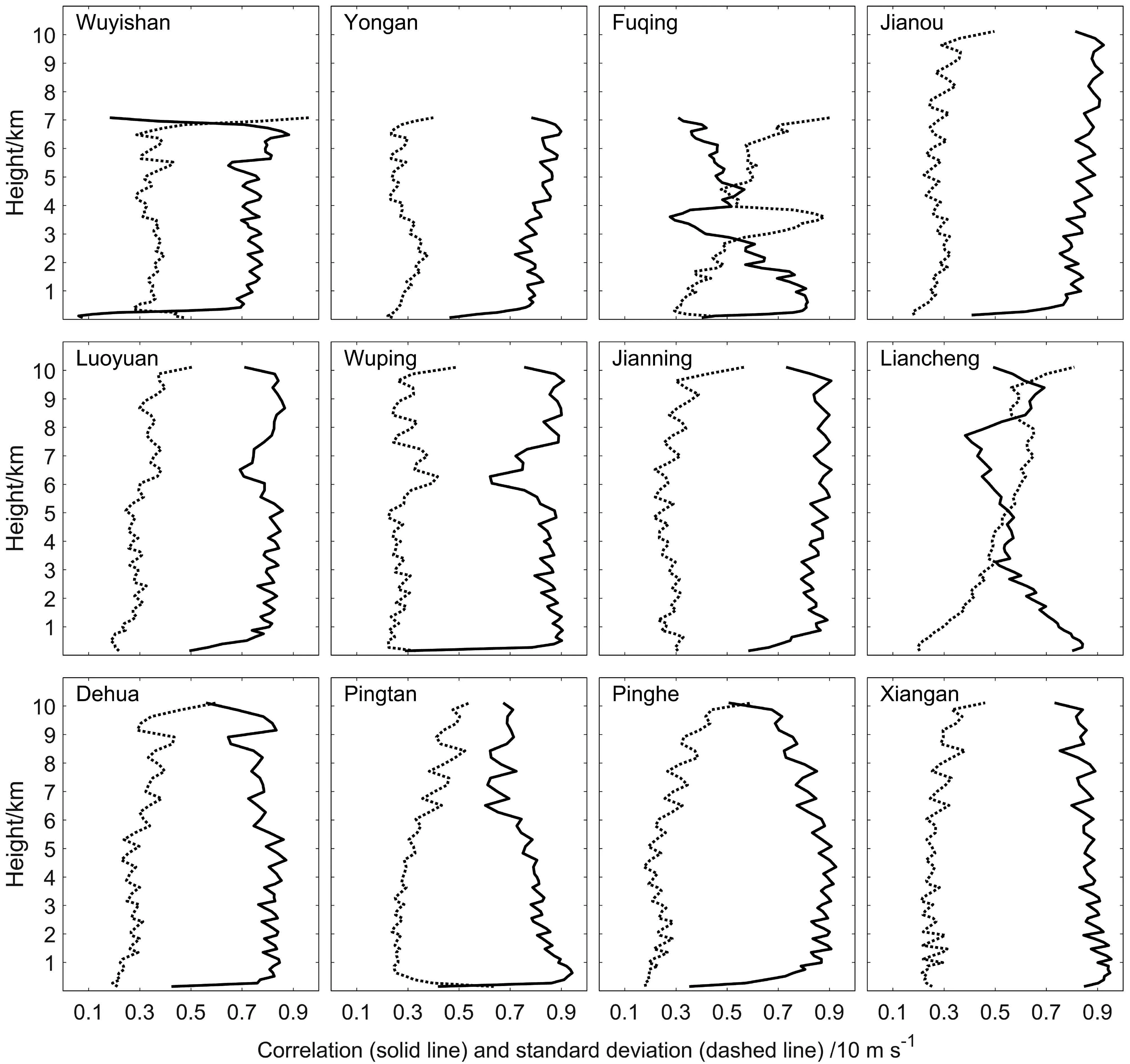
圖10 風廓線雷達v 風速與GFS 背景場相關系數(實線)與標準差(虛線,單位: 10 m s?1)的垂直分布Fig.10 Vertical distributions of standard deviations (dashed line, units: 10 m s?1) and correlations (solid line) between v-wind speed detected by windprofiler radars and GFS background
有、無降水對其余9 部雷達u 風質量的影響則不同,一般在3~5 km 以下的中低層,有降水使u風的標準差增加,而在中高層,特別是每部雷達u風標準差明顯偏大的層次,有降水則使u 風的標準差大大降低,如羅源在3390~7470 m 21 個連續垂直層上,有降水時的標準差較無降水時降低了0.15~6.48 m s?1,標準差減小幅度很大;武夷山、福清、建甌、建寧、連城、德化、平潭、平和均表現出類似特征。可見,上述9 部雷達u 風標準差異常偏大的層次,無降水情形下誤差偏大明顯甚于有降水情形。
有、無降水對各雷達站v 風標準差的影響與u風不同,各雷達站在大多數高度上有降水情形下的標準差都偏大于無降水的情形,其中翔安雷達站差異最不明顯(圖略)。

圖11 風廓線雷達有降水(實線)、無降水(虛線)情形下水平風數據獲取率Fig.11 Availability of horizontal winds detected by wind-profiler radars under the condition with (solid line) and without (dashed line) precipitation
圖13 給出了有降水減無降水情形下風廓線雷達u、v 風相對GFS 背景場的標準差差值垂直分布,可以更加直觀地看到有、無降水對風廓線雷達水平風標準差的影響,可見:有降水對風廓線雷達水平測風有較明顯的影響,特別是對u 風的影響更為顯著。總體而言,有降水使各雷達站各垂直層次上的v 風標準差以增大為主,增幅絕大多數位于1 m s?1以內;對u 風而言,有降水使各雷達站3 km 以下層次的u 風標準差以增大為主,增幅絕大多數位于1 m s?1以內,但對3 km 以上層次的u 風標準差則以減小為主,且減小幅度大幅提高。因此,對3 km以下的中低層風廓線雷達水平測風而言,降水使其整體質量有所降低,但對3 km 以上的中高層風廓線雷達水平測風而言,降水對其影響較為復雜,一方面增加了v 風的誤差,但另一方面又極大地降低了u 風的誤差。
從整層數據平均來看,僅除羅源、連城和平潭的u 風標準差在有降水情形下小于無降水情形之外,其余雷達u(v)風標準差均大于無降水時。有降水情形下,各雷達站測量水平風質量仍與雷達性能密切相關,也即在無降水情形下測風質量較好的翔安、永安、武平站,在有降水情形下,測風質量仍是其中較好的。

圖12 風廓線雷達u 風速與GFS 背景場標準差的垂直分布(藍線:有降水;黑線:無降水;紅線:所有樣本)Fig.12 Vertical distributions of u-wind speed standard deviations of wind-profiler radar products relative to GFS background (blue line denotes samples with precipitation, black line indicates samples without precipitation, and red line shows all samples)
5 風廓線雷達水平風質量控制分析
5.1 風廓線雷達水平風高可信度區間的確定
對福建12 部風廓線雷達水平風產品的數據獲取率(圖2)、相對于模式背景風場的散點分布(圖3,圖4)及其偏差隨高度的分布特征(圖5,圖6)等進行綜合分析,發現:
(1)同為L 波段LC 型號風廓線雷達,CFL-06 和CFL-03 系列雷達間差異明顯,前者在水平風的最大探測高度、有效數據獲取率和探測低層水平風的質量等方面明顯優于后者。

圖13 有降水減無降水情形下風廓線雷達(a,b)u 風速、(c,d)v 風速相對GFS 背景場的標準差差值的垂直分布Fig.13 Vertical distributions of differences in standard deviations of (a, b) u-wind speed and (c, d) v-wind speed detected by wind-profiler radars against GFS background with and without precipitation
(2)在同一系列雷達中,探測水平風質量也存在巨大差異。如武夷山和永安均為CFL-03 系列雷達,其測風模式、測風起始和終止高度、低模和高模銜接層次等完全一致,且海拔高度相近,均為我國內陸東南山地風廓線雷達站,但兩者測風能力相差較大,永安明顯優于武夷山,表現在:永安水平風數據獲取率明顯高于武夷山站;永安水平風偏差值在各高度分布均勻,異常點較少,而武夷山站在600 m 以下低層和6720 m 以上的高層有較多異常偏差值,極大偏差值超過?60 m s?1;永安各層標準差和相關系數均優于武夷山,特別是6720 m 以上的高層。福清與武夷山、永安雷達低、高模銜接高度略有不同,但其測風質量卻明顯差于永安和武夷山,其水平風偏差異常點多,異常程度高,并在各高度層均有分布,在風廓線雷達水平0 風速附近存在明顯的“零污染帶”現象。
(3)CFL-06 系列的9 部雷達中,探測水平風質量也存在巨大差異。如翔安和平潭測風模式完全一致,且海拔高度相近,均為我國東南沿海風廓線雷達站,但兩者測風能力相差較大,翔安明顯優于平潭,表現在:翔安水平風場散點分布基本沿對角線分布,偏差在各層分布均勻,異常點較少;而平潭在風廓線雷達水平0 風速附近存在明顯的“零污染帶”現象,異常偏差點主要分布在4~7.5 km 高度,翔安各層標準差和相關系數均優于平潭。其他雷達站間差異也非常大。
以上分析可見,福建12 部雷達同為L 波段LC 型號風廓線雷達,但測風質量相差很大,其有效探測高度、偏差異常所在的高度、數據可信度高的層次各不相同。朱立娟(2015)對20 部LC 邊界層風廓線雷達一個月的數據進行整體分析后,發現水平風標準差在3 km 高度以上開始明顯遞增,因此將3 km 設定為該型號雷達的有效探測高度,從而將u、v 風的標準偏差分別由5.19 m s?1和3.95 m s?1減小為2.51 m s?1和2.59 m s?1,極大地降低了LC型號風廓線雷達進入模式的數據的標準差。王丹等(2019)則結合吳蕾等(2013)、朱立娟(2015)已有研究經驗將LC 邊界層風廓線雷達的有效探測高度設定為4 km 進行質量控制。本文分析表明,基于所有風廓線雷達水平風資料分析得到的整體誤差特征,會掩蓋不同雷達誤差特征的差異性和多樣性。如以u 風標準差大于4.5 m s?1所在的最低高度為例,福清站僅為840 m,而與其同系列的永安和武夷山站則分別可以達到6840 m 和6720 m;而在另一系列的9 部雷達中,最差的連城站為3870 m,最優的翔安和武平站則能達到10110 m。因此,設定統一的高度作為LC 型號風廓線雷達的有效探測高度來進行質量控制,一方面可能無法將某些質量較差的測風數據剔除,另一方面更為重要的是,可能會丟掉許多“好”的數據,從而無法最大限度地發揮探測資料的價值。因此,為了最大限度地使用探測資料,針對各風廓線雷達站分別開展水平測風質量分析,制定差異化的質量控制方案顯得尤為必要。
基于前文分析結果,以標準差不大于4.5 m s?1作為閾值來選取各雷達站水平風可信度高的范圍,表3 列出了各站u、v 風標準差小于4.5 m s?1的區間范圍,基于連續性考慮,一旦某高度層標準差大于閾值,即視為終止高度,其上再出現的標準差小于閾值的高度層將不被采信。由表3 可見各雷達站u、v 風可信度高的區間范圍各不相同,差異很大,如u 風在福清站的可信度高的區間終止高度為720 m,而翔安站和武平站可達9870 m,其余9站則在3750~7710 m 不等;v 風可信度高的區間終止高度差異也極大,從1680~9870 m 不等。u、v 風可信度高的范圍并不完全一致,兩者重合的范圍即作為該雷達站水平風可信度高的區間范圍(表3)。
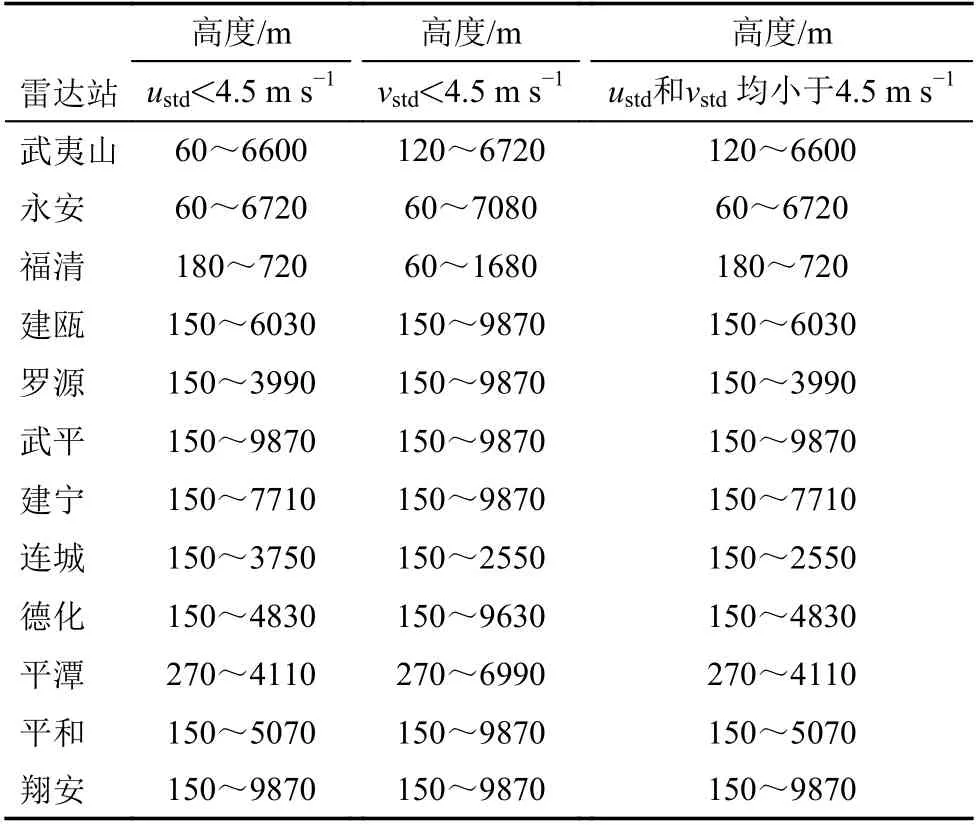
表3 福建風廓線雷達水平風標準差小于4.5 m s?1 的高度Table 3 Heights with the standard deviation of horizontal winds detected by Fujian wind-profiler radars less than 4.5 m s?1
5.2 不同質量控制方案的對比分析
朱立娟(2015)、王丹等(2019)采用固定有效探測高度的方法對LC 邊界層風廓線雷達進行質量控制,取得了較好效果,那么如果根據每部雷達特點制定差異化的質量控制方案其效果又會如何呢?本文統計分析得到的福建12 部風廓線雷達不同的有效探測高度(表1)及不同的水平風高可信度區間(表3),是否可以作為制定差異化質量控制方案的依據?與3 km 固定有效探測高度方案相比,其質量控制效果如何?為回答上述問題,本文針對福建12 部風廓線雷達開展以下三種質量控制方案的對比分析。
方案1:固定有效探測高度(3 km)質量控制方案,也即各雷達3 km 高度以上的數據將被剔除。
方案2:不同有效探測高度質量控制方案,也即各雷達采用表1 所對應的有效探測高度,其上高度的數據將被剔除。
方案3:不同高可信度區間質量控制方案,也即各雷達根據表3 將不在高可信度區間范圍之內的數據予以剔除。
圖14a–c 分別給出了采用上述三種方案質量控制前后的水平風標準差、平均誤差及剔除數據比例的統計結果,圖中0 代表原始數據;1 代表剔除了3 km 以上高度的數據;2 代表剔除了數據獲取率小于80%所在高度層的數據;3 代表剔除了u、v 風標準差≥4.5 m s?1所在高度層的數據。由原始數據的誤差統計結果可見,各雷達站u 風標準差差異很大,永安和翔安站最小,分別為2.72 m s?1和2.73 m s?1,福清站最大,為7.34 m s?1。除永安、翔安和武平u 風標準差在3 m s?1以下外,其余9 站均大于3.36 m s?1,5 站大于4.34 m s?1。v 風標準差僅除武夷山和永安略大于u 風標準差外,其余10 站均小于u 風標準差。u 風平均誤差在?0.67 m s?1(翔安)~?2.35 m s?1(福清)間,均為負偏差,除翔安(?0.67 m s?1)和德化(?0.96 m s?1)外,其余各站平均誤差均較大。v 風平均誤差小于u 風,數值在?0.06~?1.22 m s?1間,僅德化和平潭平均誤差超過?1 m s?1。

圖14 (a)方案1、(b)方案2 及(c)方案3 質量控制前后福建12 部風廓線雷達水平風與GFS 背景場的標準差(STD)、平均誤差(ERR)及數據剔除率(PDR)(0 代表無質量控制,1、2、3 分別代表方案1、方案2 和方案3)Fig.14 Standard deviations (STDs) and mean errors (ERR) of horizontal winds detected by 12 wind-profiler radars in Fujian Province against GFS background and their percentages of data rejection (PDR)before and after QC with schemes 1 (a), 2 (b), and 3 (c), respectively (0 indicates no QC. 1, 2, and 3 denote QC with schemes 1, 2, and 3,respectively)
采用方案1 的統計結果(圖14a)可見,除翔安和永安原始數據統計的標準差本來就不大,因而剔除3 km 高度以上數據后誤差無明顯變化外,大多數雷達站u、v 風標準差明顯減小,由原始數據的u 風標準差2.72~7.34 m s?1減小到2.25~5.35 m s?1,v 風 標 準 差 則 由2.49~5.13 m s?1減 小 到2.33~4.12 m s?1,u 風平均誤差由?0.67~?2.35 m s?1減小到?0.42~?1.23 m s?1,v 風平均誤差由?0.06~?1.22 m s?1減小到0.2~?0.97 m s?1及0.13 m s?1,u、v 風均值偏離0 m s?1的程度總體上有所減小,偏差值基本在0 m s?1附近。因此,將3 km 作為各雷達站的有效探測高度,剔除3 km 高度以上的數據后,確實極大地降低了風廓線雷達水平風的標準差和平均誤差,但福清雷達u、v 風標準差(5.35 m s?1和4.12 m s?1)仍顯著偏大。同時注意到,各雷達站被剔除的數據占原始數據的比例為20.87%~51.04%,其中CFL-06 系列的9 部雷達數據剔除率均在50%左右。
采用方案2 的統計結果(圖14b)發現,該差異化的質量控制方案,也能夠在原始數據基礎上降低水平風誤差,u 風標準差減小到2.56~5.23 m s?1,v 風標準差減小到2.28~4.29 m s?1,u 風平均誤差減小到?0.26 ~?1.74 m s?1,v 風平均誤差減小到?0.15~?1.13 m s?1及0.18 m s?1,各雷達站被剔除的數據占原始數據的比例為12.13%~34.83%,說明采用不同有效探測高度的差異化質量控制方案也能夠在原始數據基礎上降低水平風的誤差,且剔除的數據相對較少,其中CFL-06 系列的9 部雷達數據剔除率降至12%~19%。同時注意到,盡管水平風誤差與原始數據相比有所減小,但福清、羅源、連城、平潭等站誤差依然較大。
而采用方案3 的誤差對比(圖14c)分析表明,各雷達站剔除不同高可信度區間范圍之外的資料后,也能夠在原始數據基礎上降低水平風誤差,各雷達站u 風標準差減小到了2.43~3.93 m s?1,v 風標準差 減 小 到 了2.28~3.56 m s?1,u 風 平 均 誤 差 為?0.63~?1.29 m s?1及1.36 m s?1,v 風平均誤差為?0.14~?1.12 m s?1及0.92 m s?1,較原始數據誤差均明顯降低,各雷達站被剔除的數據占原始數據的比例為0.36%~78.3%,說明采用不同高可信度區間的差異化質量控制方案也能夠在原始數據基礎上降低水平風的誤差,但剔除數據在不同雷達間存在明顯差異。
以上分析表明,采用3 km 固定有效探測高度、不同有效探測高度及不同高可信度區間等三種質量控制方案,均能夠在原始數據基礎上降低水平風誤差,但各方案誤差減小幅度不同,剔除數據比例亦不同。為進一步了解三種質量控制方案的特點和差異,下面對比分析三種不同質量控制方案對每一個雷達站的影響(圖15),發現了以下特征:

圖15 三種不同質量控制方案下風廓線雷達水平風與GFS 背景場的標準差及數據剔除率(STD 代表標準差;PDR 代表數據剔除率;數字代表相應的質量控制方案)Fig.15 Standard deviations of horizontal winds detected by windprofiler radars against GFS background and their percentages of data rejection with three different QC schemes (STD denotes standard deviation. PDR indicates percentages of data rejection. Numbers i ndicate the corresponding QC scheme)
(1)對翔安、永安、武平、武夷山、建甌、建寧、德化等原始數據水平風誤差相對較小的雷達站,三種質控方案誤差差異不大,但兩種差異化質量控制方案極大地降低了固定有效探測高度方案對“好”數據的剔除,尤其是不同高可信度區間方案,效果更為顯著。
具體而言,翔安風廓線雷達原始數據u(v)風標準差為2.73 m s?1(2.58 m s?1),采用方案1、方案2 及方案3 等三種不同質控方案后則分別減小為2.72 m s?1(2.50 m s?1)、2.64 m s?1(2.49 m s?1)和2.71 m s?1(2.57 m s?1),三種方案誤差差異不大,但數據剔除率卻相差極大,方案1 高達50.09%,方案2 降低為17.08%,方案3 則進一步降低,僅為0.36%。也即采用方案1 翔安有一半的數據被剔除掉,而這些數據質量并不差;采用方案2 和方案3 僅剔除17.08%和0.36%的數據即達到了與方案1 剔除了50.09%的數據相當的效果。類似的還有永安站,原始數據u(v)風標準差為2.72 m s?1(2.95 m s?1),采用方案1、方案2 及方案3 進行質控后u(v)風標準差分別為2.52 m s?1(3.05 m s?1)、2.56 m s?1(3.05 m s?1)和2.67 m s?1(2.94 m s?1),u 風標準差均有所下降,v 風標準差除了方案3 有所下降外,其余兩個方案略有上升。同樣的,三種方案誤差差異不大,但數據剔除率卻相差極大,方案1 高達37.56%,方案2 降低為26.38%,而方案3 則僅為1.38%。武平站原始數據、采用方案1、方案2 以及方案3 后u 風標準差分別為2.86 m s?1、2.47 m s?1、2.65 m s?1和2.85 m s?1;v 風標準差分別為2.78 m s?1、2.66 m s?1、2.63 m s?1和2.77 m s?1,三種質控方案下水平風的標準差均有所降低,其中方案3 誤差減小的最少。三種方案標準差都小于3 m s?1,均在可以接受的范圍之內,但方案1 卻以剔除了48.71%的數據為代價,方案2 將該比例降低為19.04%,而方案3 則進一步降低為0.32%。因此,對于翔安、永安和武平風廓線雷達站而言,三種質控方案水平風誤差相差不大,但數據剔除率差異巨大:方案1 數據剔除率在37.56%~50.09%,方案2 為17.08%~26.38%,方案3 則為0.32%~1.38%。
武夷山、建甌、建寧、德化站,采用方案2 和方案3 的u 風標準差高于(方案2 下武夷山除外)、v 風標準差低于(武夷山、建甌、建寧)或接近于(德化)方案1 的標準差,三種方案u、v 風標準差差值絕對值范圍在0.01~0.29 m s?1,相對而言相差不大,并且除武夷山站v 風標準差仍然大于3 m s?1外,其余均小于3 m s?1,但方案2 和方案3 的資料剔除率相較方案1 明顯減少,其中方案2下武夷山、建甌、建寧、德化站的資料剔除率分別減少了?9.98%、31.11%、31%和27.36%;方案3則分別減少了16.57%、34.44%、43.69%和25.55%,除方案2 武夷山站資料剔除率略有增長外,其余均減小,且方案3 較方案2 資料剔除率減小的幅度更大(德化除外)。注意到,盡管武夷山站方案2 較方案1 數據剔除率增加了9.98%,但方案2 的u、v 風標準差較方案1 均有所減少;而德化站方案3較方案2 資料剔除率增加了1.81%,但方案3 的u、v 風標準差較方案2 均有所降低。
以上分析表明,對于翔安、永安、武平、武夷山、建甌、建寧、德化而言,不同高可信度區間方案最優,不同有效探測高度方案次之,3 km 固定有效探測高度方案再次之。
(2)對福清等原始數據水平風誤差相對極大的雷達站,采用固定有效探測高度方案后誤差依然較大,但兩種差異化質控方案可進一步剔除“壞”數據,使誤差進一步有所下降,尤其是不同高可信度區間方案,效果更為顯著。具體而言,福清站原始數據u(v)風標準差為7.34 m s?1(5.13 m s?1),采 用 方 案1 后u(v)風 標 準 差 降 至5.35 m s?1(4.12 m s?1),誤差仍然非常大;采用方案2 后u(v)風標準差進一步降至5.23 m s?1(3.97 m s?1),但仍較大;采用方案3 后u(v)風標準差降至3.93 m s?1(3.16 m s?1),誤差較前兩種方案明顯降低。方案1 數據剔除率為30.93%,方案2 增加為34.83%,而方案3 則進一步增加為78.3%,說明不同高可信度區間方案有效地實現了差異化的質量控制目標,效果非常顯著。以上分析表明,對福清站而言,不同高可信度區間方案最優,不同有效探測高度方案次之,3 km 固定有效探測高度方案再次之。
(3)對羅源、連城、平潭、平和等原始數據水平風誤差相對較大的雷達站,不同高可信度區間方案最優,3 km 固定有效探測高度方案次之,不同有效探測高度方案再次之。具體而言,羅源、連城、平潭、平和站,u 風標準差在4.34 m s?1(羅源站)~5.42 m s?1(平和站),如圖15 所示可見方案1 與方案3 分別將羅源、平和站的u 風標準差降到了2.79 m s?1和2.43 m s?1以下,其中方案3 較方案1 的資料剔除率分別降低了17.93%和27.35%;而方案2 則不同,雖然其較方案1 的資料剔除率降低幅度更大(分別為36.87%和34.48%),但其u 風標準差分別為3.92 m s?1和3.23 m s?1,仍然較大。對連城站而言,原始數據u(v)風標準差為4.88 m s?1(4.66 m s?1),采用方案1 后數據剔除率為50.96%,標準差降至3.45 m s?1(3.54 m s?1),誤差仍較大;采用方案3 后數據剔除率提高為57.07%,標準差則進一步降至3.42 m s?1(3.38 m s?1),進一步說明了不同高可信度區間質量控制方案的優越性。對平潭站而言,原始數據u(v)風標準差為4.81 m s?1(3.19 m s?1),方 案1 將 標 準 差 降 至3.28 m s?1(2.91 m s?1),資料剔除率51.04%;方案3 則進一步將標準差降至3.11 m s?1(2.72 m s?1),誤差明顯降低,但數據剔除率卻降低為33.29%,表明對平潭站而言,相較于不同高可信度區間的質控方案,固定有效探測高度方案剔除了更多的資料,誤差卻不降反升,表明許多“好”數據被剔除了。對連城和平潭站而言,方案2 數據剔除率低于另外兩種方案,但其未將誤差降至合理區間,標準差仍然高達4.66 m s?1和4.83 m s?1,說明不同有效探測高度方案對連城和平潭站質控效果不好。
綜上所述,對福建12 部風廓線雷達而言,均是不同高可信度區間方案最優;其中對翔安、永安、武平、福清、武夷山、建甌、建寧、德化等8 部雷達而言,不同有效探測高度方案優于3 km 固定有效探測高度方案;而對羅源、連城、平潭、平和等4 部雷達而言,則反之。以上分析表明,采用差異化的質量控制方案,特別是不同高可信度區間方案,不同雷達站的水平測風數據得到更加充分和有效的識別,一方面減少了不必要的資料損失,另一方面則可將質量不好的數據進一步加以剔除。
5.3 有降水時水平風場質量控制方案
基于4.2.2 節統計的各雷達站在有降水情形下u、v 風標準差隨高度的分布特征,同樣以標準差不大于4.5 m s?1作為閾值得到了各雷達站水平風可信度高的連續區間范圍(表4),與不區分有無降水所有樣本統計得到的高可信度區間范圍(表3)相比,可見永安、建甌、羅源、德化、平潭和平和站在有降水情形下的高可信度區間范圍更大,翔安站范圍相同,而武夷山、福清、武平、建寧和連城站范圍則略有減小。
依照高可信度區間方案對有降水情形下的各風廓線雷達水平測風數據進行初步的質量控制,也即在有降水情形下,各雷達按照表4 將高可信度區間范圍之外的數據予以剔除。圖16 給出了有降水情形下各雷達站質量控制前后的水平風標準差分布,可見,有降水情形下原始數據統計的各雷達站水平風標準差差異很大,u 風標準差為3.12 m s?1~7.88 m s?1,v 風標準差為2.83 m s?1~5.54 m s?1,經初步質量控制后,u 風標準差減小為2.93 m s?1~4.33 m s?1,v 風標準差減小為2.71 m s?1~4.20 m s?1,各雷達站u、v 風標準差經質量控制后均有所減小,其中翔安、武平、永安等3 部水平風質量較好的雷達在質量控制后u、v 風標準差降低幅度較小,其余9部雷達質控后u、v 風標準差均有較大幅度的減小,特別是福清、羅源、連城、平潭、平和等站,水平風標準差減小幅度最高達到了51%。

表4 有雨情形下福建風廓線雷達水平風標準差小于4.5 m s?1的高度Table 4 Heights with the standard deviation of horizontal winds detected by Fujian wind-profiler radars less than 4.5 m s?1 under precipitation condition

圖16 有降水情形下不同高可信度區間方案質量控制前后風廓線雷達水平風與GFS 背景場的標準差(0 代表有降水樣本;3 代表有降水樣本中剔除了u、v 風標準差≥4.5 m s?1 所在高度層的數據)Fig.16 Standard deviations of horizontal winds detected by windprofiler radars against GFS background before and after quality control with schemes of different high-confidence ranges under precipitation conditions (0 denotes all samples with precipitation, and 3 denotes samples whose data at heights with standard deviations of u and v greater than 4.5 m s?1 are rejected under precipitation conditions)
以上分析可見,基于有降水情形風廓線雷達數據統計得到的不同高可信度區間的質量控制方案也對有降水情形下水平風數據的質量控制取得了較好的效果。
6 結論與討論
以2017 年1~12 月逐日四個時次(00 時、06 時、12 時、18 時)GFS 全球預報分析場作為數值預報背景場,結合地面降水資料,面向資料同化分析了福建12 部L 波段LC 型號邊界層和低對流層風廓線雷達水平測風產品的質量特征,并初步探討了三種質量控制方案的影響差異,結果表明:
(1)L 波段風廓線雷達CFL-06 系列和CFL-03 系列差異明顯,前者在水平風的最大探測高度、有效數據獲取率和探測低層水平風的質量等方面明顯優于后者。
(2)福建相同系列的不同風廓線雷達站探測水平風的數據獲取率、有效探測高度、標準差、相關系數及偏差的垂直分布特征等存在極大差異,該差異的原因與地理位置(沿海或內陸)、海拔高度等并無直接關系。地物雜波、間歇性干擾、降水干擾、地磁干擾、雷達性能參數、雷達儀器靈敏度、均勻風的假定、雷達的信噪比等均是影響風廓線雷達測風精度的因素,然而究竟是哪些因素在福建12 部雷達探測水平風的數據獲取率、有效探測高度、標準差、相關系數及偏差垂直分布特征的差異性中起到了關鍵性作用,值得進一步開展研究。
(3)相同系列的不同風廓線雷達探測水平風質量存在極大差異。CFL-03 系列的3 部風廓線雷達中,永安風廓線雷達探測水平風場質量相對最優,u(v)風標準差為2.72 m s?1(2.95 m s?1);武夷山次之,u(v)風標準差為3.69 m s?1(3.70 m s?1);福清最差,u(v)風標準差高達7.34 m s?1(5.13 m s?1)。CFL-06 系列的9 部風廓線雷達中,翔安風廓線雷達探測水平風場質量相對最優,u(v)風標準差為2.73 m s?1(2.58 m s?1);武平次之,u(v)風標準差為2.86 m s?1(2.78 m s?1);建甌、建寧、德化、羅源、平潭、平和、連城依次再次之,u(v)風標準差范圍為3.36 m s?1~5.42 m s?1(2.76 m s?1~4.66 m s?1)。
(4)福清、建甌、羅源、建寧、連城、德化、平潭和平和站均在風廓線雷達u 風0 風速附近出現較多異常偏差點,其背景風往往為較強西風,異常偏差點所在高度相對集中,但不同雷達站不盡相同。其中福清異常偏差點明顯多于其他站,各高度層均有分布。
(5)各風廓線雷達站探測u 風速相對背景場存在明顯系統性負偏差,小于背景場,不滿足資料同化對背景場無偏的需求,在資料同化中需經過偏差訂正去除該系統偏差;而v 風則相對較好。
(6)不同風廓線雷達站探測水平風的能力相差很大,針對不同雷達制定差異化的質量控制方案十分必要。本文提出了不同高可信度區間和不同有效探測高度兩種差異化質量控制方案,并與固定有效探測高度方案進行了對比,結果表明,本文提出的兩種差異化質量控制方案具有明顯優勢,特別是不同高可信度區間方案,表現出很大的優越性:差異化質量控制效果顯著,不同雷達站的水平測風數據得到更加充分和有效的識別,一方面減少了雷達資料不必要的損失,另一方面可將質量差的數據進一步剔除。
(7)降水對風廓線雷達水平風產品的數據獲取率和測風質量均有較明顯的影響。有降水使數據獲取率在中低層有所減小,在中高層則大幅提高。對3 km 以下的中低層風廓線雷達水平測風而言,降水使其整體質量有所降低,但對3 km 以上的中高層而言,降水對其影響較為復雜,一方面增加了v 風的誤差,但另一方面又極大地降低了u 風的誤差。根據有降水情形下各雷達站水平風標準差垂直分布特征確定的不同雷達站高可信度區間的質量控制方案,在有降水情形下也得到了較好的效果。
翔安風廓線雷達站水平測風質量明顯優于其他測站,是什么原因導致相同型號相同系列不同雷達站水平測風質量出現極大差異?翔安、平潭風廓線雷達均位于沿海,且均為L 波段低對流層風廓線雷達CFL-06 系列,兩者的低模和高模工作模態也完全一致,但兩者測量水平風能力差異較大,與GFS全球背景風場相比,翔安明顯優于平潭,特別是在4~7.5 km 高度上,是什么原因引起的兩者在該高度上水平測風能力的極大差異尚不清楚,需要進一步探討。翔安風廓線雷達站在建設中是否有什么經驗使得其數據質量更優?在后續建設雷達站時是否可以借鑒其經驗?這些都需要進一步深入分析。
另外,總體而言,福建風廓線雷達探測u 風標準差明顯大于v 風,并且u 風偏差明顯大于v 風偏差的點幾乎全部集中于高模探測高度上,是什么原因導致的該現象尚不清楚,而統計分析風廓線雷達探測高度上水平風場不均勻性的總體特征、并詳細了解風廓線雷達站各種探測模式的雷達技術指標,可能有助于理解u、v 風探測質量的差異。
需要指出的是,本文對有降水情形下的風廓線雷達水平測風數據采用不同高可信度區間質量控制方案取得了較理想的效果,但由于本文定義的有降水情形為統計時刻前、后3 h 之間地面觀測有降水,因此實時應用該方案時,對統計時刻及之前3 h 地面觀測無降水、但統計時刻后3 h 地面觀測出現降水的情形無法準確判別為有降水情形。
不同風廓線雷達水平測風質量相差極大,針對每一部風廓線雷達開展詳盡的質量分析,尋找其誤差分布特征,進而制定差異化的質量控制方案是最大最優化利用好風廓線雷達水平測風數據的有效途徑。本文提出的不同高可信度區間質量控制方案在風廓線雷達水平測風數據資料同化中的應用效果如何,需開展數值試驗研究,將另文討論。
猜你喜歡
中學生數理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(2018年6期)2018-04-22 03:16:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54