基于圖像處理的在線吸塵機器人研究與實現(xiàn)
2021-04-13 08:46:36咼倩于寶成徐文霞
電腦知識與技術(shù) 2021年5期
咼倩 于寶成 徐文霞

摘要:為解決工業(yè)生產(chǎn)線灰塵清理以及產(chǎn)線過度磨損的問題,本文研發(fā)設(shè)計了一種基于圖像檢索算法的產(chǎn)線智能吸塵機器人。首先設(shè)計了產(chǎn)線吸塵機器人的機械結(jié)構(gòu),其次,為提升其吸塵效率,基于攝像頭獲取的實時傳送帶監(jiān)控圖像,采用小波變換和GLCM算法檢索圖像紋理特征,使用根據(jù)距離度量法計算圖像的相似度,相似度越低,吸塵口風(fēng)速越大,然后,控制直流電機的轉(zhuǎn)速調(diào)整吸塵口風(fēng)速。經(jīng)實際產(chǎn)線環(huán)境測試實驗,吸塵機器人的底座能與產(chǎn)線無縫配合,沿傳送帶自動吸塵。此外,將圖像處理技術(shù)應(yīng)用于產(chǎn)線上,把吸塵效率作為吸塵的量化評價指標(biāo),產(chǎn)線吸塵機器人在傳送帶上吸塵可以達到93%以上的吸塵效率。
關(guān)鍵詞:產(chǎn)線吸塵機器人;圖像處理;灰塵檢測;灰度共生矩陣;小波變換
Abstract: In order to solve the problems of dust cleaning and excessive wear of industrial production line, an intelligent dust cleaning robot based on image retrieval algorithm is developed and designed in this paper. Firstly, the mechanical structure of the production line vacuum cleaning robot is designed. Secondly, in order to improve its dust collection efficiency, the wavelet transform and GLCM algorithm are used to retrieve the image texture features based on the real-time monitoring image of the conveyor belt obtained by the camera. The similarity of the image is calculated by the distance measurement method. The lower the similarity is, the greater the wind speed of the dust suction port is. Then, the speed of the DC motor is controlled to adjust the dust suction port Wind speed. According to the actual production line environment test, the base of the vacuum cleaning robot can cooperate with the production line seamlessly and automatically dust along the conveyor belt. In addition, the image processing technology is applied to the production line, and the dust collection efficiency is taken as the quantitative evaluation index of dust collection. The dust collection efficiency of the production line vacuum cleaning robot on the conveyor belt can reach more than 93%.
Key words: production line vacuum robot; image processing; dust detection; gray level co-occurrence matrix; wavelet transform
世界已經(jīng)進入了工業(yè)4.0時代,主要目標(biāo)是實現(xiàn)無人化工廠以及工業(yè)設(shè)備智能化。實際工廠中,工業(yè)上的互感器檢測線工作一段時間后,上面會產(chǎn)生大量的灰塵,從而影響繼續(xù)生產(chǎn),而灰塵積累過多會損傷產(chǎn)線,傳送帶損傷情況如圖1所示。為了正常地進行生產(chǎn),需要清理傳送帶上的灰塵。通常依靠人力來清潔,不僅難度比較大,時間長,沒有實現(xiàn)自動化吸塵,還會造成產(chǎn)線嚴(yán)重磨損。研發(fā)產(chǎn)線智能吸塵機器人,將會節(jié)省大量的人力物力,能夠在線吸塵,實現(xiàn)智能化生產(chǎn),不會造成產(chǎn)線損傷,同時,根據(jù)傳送帶灰塵和碎屑含量來控制機器人的吸塵力度,這樣能提高產(chǎn)線智能機器人的效率,節(jié)約能源,并提高經(jīng)濟效益。
為了提升產(chǎn)線吸塵機器人的吸塵效率,用攝像頭實時采集傳送帶上的圖像,對采集的圖像預(yù)處理后,基于紋理特征對圖像進行檢索。國內(nèi)外學(xué)者基于紋理特征對圖像檢索方法進行了大量的研究[1-3],最開始提出了自相關(guān)函數(shù)法,但是沒有具體的定義及描述,只是進行了一些數(shù)學(xué)上的改變;比較有代表性的是Haralick提出了GLCM來提取紋理特征,這種方法能夠根據(jù)圖像的灰度值來分析圖像的信息,GLCM對分析圖像紋理信息非常有效;隨后,提出了MRF理論,這個理論為分析圖像紋理特征開辟了一個新的方向;經(jīng)過不斷地研究與實驗,發(fā)現(xiàn)紋理特征無法從不同的尺度提取,針對這個問題,Mallat提出了小波分析的方法[4],這種方法能夠基于不同尺度來描述紋理特征;近年來,Ojala等人提出了LBP力論,LBP不僅能在不同的尺度描述紋理特征,而且比較容易計算,此外,任意對其進行旋轉(zhuǎn),數(shù)值依然不會改變。本文采用小波變換和GLCM來描述紋理特征[5]。
本文在此背景下,設(shè)計一個產(chǎn)線智能吸塵的機器人,旨在使吸塵機器人與傳送帶無縫配合,并能根據(jù)傳送帶上灰塵的含量控制吸塵力度,實現(xiàn)自動化吸塵。產(chǎn)線吸塵機器人的硬件部分主要包括電源、直流電機、ARM CortexTM-M3處理器、離心風(fēng)機、掃塵毛刷、集塵器、攝像頭。機器人隨著傳送帶運動,攝像頭采集傳送帶上實時圖像,將信號發(fā)送給STM32F103 ARM芯片,STM32F103 ARM芯片對發(fā)送過來的圖像信息進行處理,基于紋理特征對圖像進行檢索,對圖像進行小波變換后,計算四個方向上的灰度共生矩陣GLCM,然后,采用距離度量法計算得到實時圖像與模板圖像的相似值,進行模板匹配,然后控制電機,對傳送帶進行吸塵。最后,對產(chǎn)線智能吸塵機器人做了多次吸塵實驗,以檢測機器人的吸塵效果。
1 基于空氣動力學(xué)特征的產(chǎn)線機器人設(shè)計
1.1機械結(jié)構(gòu)
產(chǎn)線智能吸塵機器人主要由電源、離心風(fēng)機、充電接頭、濾塵袋、吸塵口、掃塵毛刷、托盤、集塵器、灰塵傳感器、攝像頭等組成。攝像頭用來采集傳送帶上的實時圖像;集塵器用來收集灰塵;灰塵傳感器檢測灰塵濃度;直流電機驅(qū)動離心風(fēng)機的葉輪快速旋轉(zhuǎn),使產(chǎn)線機器人內(nèi)外部形成壓力差;掃塵毛刷掃起傳送帶上的灰塵。產(chǎn)線機器人機械結(jié)構(gòu)如圖2(a)。
本文設(shè)計的產(chǎn)線智能吸塵機器人的底座與產(chǎn)線無縫配合,使吸塵機器人沿傳輸帶自動運動,并將吸塵技術(shù)應(yīng)用于產(chǎn)線上,實現(xiàn)產(chǎn)線的自動化吸塵。產(chǎn)線機器人底座圖如圖2(b)所示。
根據(jù)以上設(shè)計,使用3D打印技術(shù)制作部分構(gòu)件,產(chǎn)線吸塵機器人實物圖如圖2(c)所示。
圖片說明:(a)產(chǎn)線智能吸塵機器人結(jié)構(gòu)圖; (b)產(chǎn)線智能吸塵機器人底座圖; (c)產(chǎn)線智能機器人實物圖。
1.2空氣動力學(xué)特征
產(chǎn)線智能吸塵機器人吸塵原理為,動力提供給掃塵毛刷后,使傳送帶上灰塵和碎屑懸浮于空中;直流電機同時為離心風(fēng)機供給動力,驅(qū)動風(fēng)機葉輪高速運轉(zhuǎn),葉輪周圍的空氣被帶動旋轉(zhuǎn),此時,由于受到了離心力,葉輪中央的空氣流動到葉輪邊緣,葉輪中央形成了真空,真空室內(nèi)氣體壓力降低,在吸塵口中出現(xiàn)了速度非常高的氣流,吸塵口的內(nèi)部和外部形成了很大的壓力差,從而產(chǎn)生了空氣吸力,灰塵和碎屑隨著氣流一起運動,接著充滿灰塵和碎屑的空氣被吸入吸塵口里,然后進入集塵室中,過濾器對吸入的空氣過濾后,灰塵和碎屑留在了集塵室,而排除潔凈空氣。
其中,灰塵在氣流作用下,灰塵和碎屑起跳主要的原因是受到了沖擊力,個別灰塵和碎屑開始振動或者前后搖動,離心風(fēng)機風(fēng)速逐漸加大,振動變強,灰塵和碎屑會離開原來的位置,接著,灰塵和碎屑振動進一步加強,灰塵的上升力與沖擊力越來越大,灰塵和碎屑開始向前滾動。當(dāng)灰塵和碎屑相互碰撞或碰到傳送帶時,一些灰塵和碎屑會由水平滾動變成垂直運動,緊接著,灰塵和碎屑會在氣流的空氣阻力和重力影響下向前向下氣流一起運動,并被吸入吸塵口中,隨后進入集塵室里。
灰塵起動風(fēng)速為塵粒被吸起的最小風(fēng)速。超過這個起動風(fēng)速后,灰塵和碎屑隨著氣流一起運動。如果塵粒的起動速度太快,可能會浪費資源、造成灰塵和碎屑間的磨損,塵粒的起動風(fēng)速會影響吸塵效率,塵粒啟動的最小風(fēng)速為:
傳送帶上灰塵和碎屑含量和吸塵風(fēng)速的關(guān)系如表1所示。
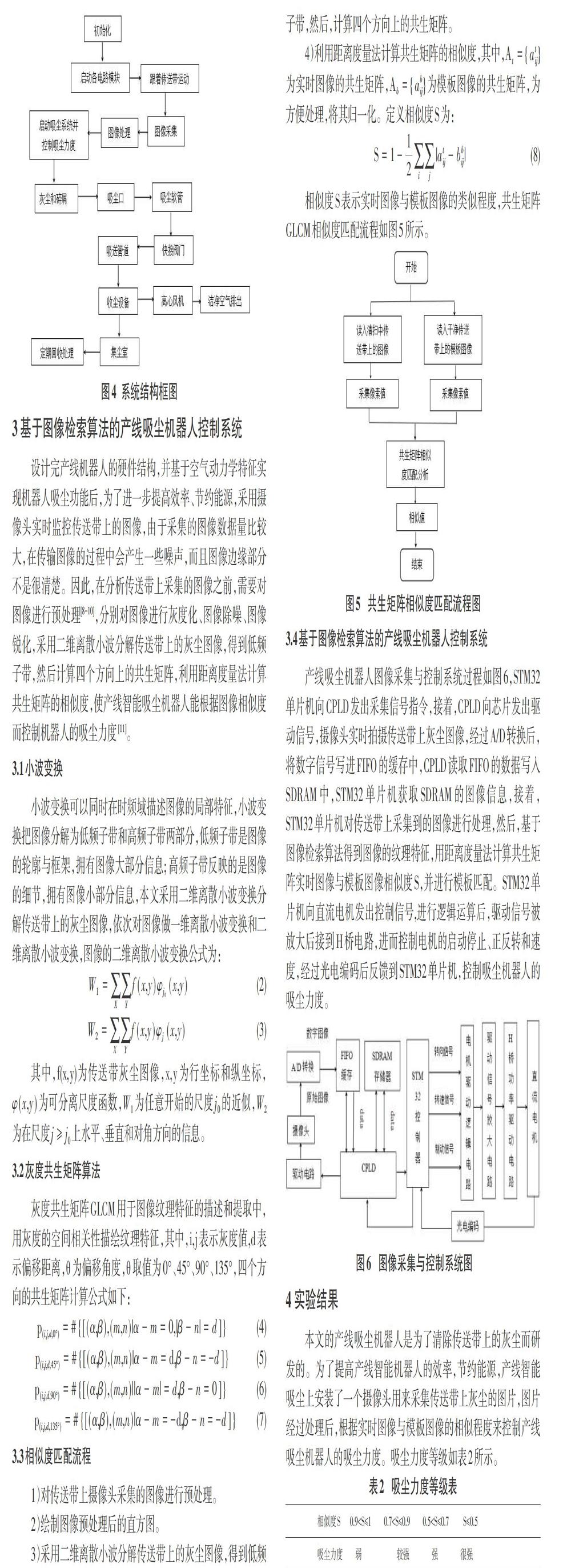
2 系統(tǒng)硬件主體的設(shè)計
產(chǎn)線智能吸塵機器人控制系統(tǒng)的主要任務(wù)是根據(jù)攝像頭采集的圖像,進行模板匹配,進而控制機器人的吸塵力度,并完成各種控制動作。產(chǎn)線智能吸塵機器人采用STM32單片機控制[6],STM32單片機使用ARM Cortex?-M3內(nèi)核來控制產(chǎn)線吸塵機器人系統(tǒng)的硬件模塊[7]。控制系統(tǒng)相互關(guān)系圖如圖3所示。
本系統(tǒng)的結(jié)構(gòu)框圖如圖4所示。
3 基于圖像檢索算法的產(chǎn)線吸塵機器人控制系統(tǒng)
設(shè)計完產(chǎn)線機器人的硬件結(jié)構(gòu),并基于空氣動力學(xué)特征實現(xiàn)機器人吸塵功能后,為了進一步提高效率、節(jié)約能源,采用攝像頭實時監(jiān)控傳送帶上的圖像,由于采集的圖像數(shù)據(jù)量比較大,在傳輸圖像的過程中會產(chǎn)生一些噪聲,而且圖像邊緣部分不是很清楚。因此,在分析傳送帶上采集的圖像之前,需要對圖像進行預(yù)處理[8-10],分別對圖像進行灰度化、圖像除噪、圖像銳化,采用二維離散小波分解傳送帶上的灰塵圖像,得到低頻子帶,然后計算四個方向上的共生矩陣,利用距離度量法計算共生矩陣的相似度,使產(chǎn)線智能吸塵機器人能根據(jù)圖像相似度而控制機器人的吸塵力度 [11]。
3.1小波變換
小波變換可以同時在時頻域描述圖像的局部特征,小波變換把圖像分解為低頻子帶和高頻子帶兩部分,低頻子帶是圖像的輪廓與框架,擁有圖像大部分信息; 高頻子帶反映的是圖像的細(xì)節(jié),擁有圖像小部分信息,本文采用二維離散小波變換分解傳送帶上的灰塵圖像,依次對圖像做一維離散小波變換和二維離散小波變換,圖像的二維離散小波變換公式為:
其中,f(x,y)為傳送帶灰塵圖像,x,y為行坐標(biāo)和縱坐標(biāo),[φ(x,y)]為可分離尺度函數(shù),[W1]為任意開始的尺度[j0]的近似,[W2]為在尺度[j≥j0]上水平、垂直和對角方向的信息。
3.2灰度共生矩陣算法
灰度共生矩陣GLCM用于圖像紋理特征的描述和提取中,用灰度的空間相關(guān)性描繪紋理特征,其中,i,j表示灰度值,d表示偏移距離,θ為偏移角度,θ取值為0°、45°、90°、135°,四個方向的共生矩陣計算公式如下:
3.3相似度匹配流程
1)對傳送帶上攝像頭采集的圖像進行預(yù)處理。
2)繪制圖像預(yù)處理后的直方圖。
3)采用二維離散小波分解傳送帶上的灰塵圖像,得到低頻子帶,然后,計算四個方向上的共生矩陣。
4)利用距離度量法計算共生矩陣的相似度,其中,[At={atij}]為實時圖像的共生矩陣,[Ab={abij}]為模板圖像的共生矩陣,為方便處理,將其歸一化。定義相似度S為:相似度S表示實時圖像與模板圖像的類似程度,共生矩陣GLCM相似度匹配流程如圖5所示。
3.4基于圖像檢索算法的產(chǎn)線吸塵機器人控制系統(tǒng)
產(chǎn)線吸塵機器人圖像采集與控制系統(tǒng)過程如圖6,STM32單片機向CPLD發(fā)出采集信號指令,接著,CPLD向芯片發(fā)出驅(qū)動信號,攝像頭實時拍攝傳送帶上灰塵圖像,經(jīng)過A/D轉(zhuǎn)換后,將數(shù)字信號寫進FIFO的緩存中,CPLD讀取FIFO的數(shù)據(jù)寫入SDRAM中,STM32單片機獲取SDRAM的圖像信息,接著,STM32單片機對傳送帶上采集到的圖像進行處理,然后,基于圖像檢索算法得到圖像的紋理特征,用距離度量法計算共生矩陣實時圖像與模板圖像相似度S,并進行模板匹配。STM32單片機向直流電機發(fā)出控制信號,進行邏輯運算后,驅(qū)動信號被放大后接到H橋電路,進而控制電機的啟動停止、正反轉(zhuǎn)和速度,經(jīng)過光電編碼后反饋到STM32單片機,控制吸塵機器人的吸塵力度。
4 實驗結(jié)果
本文的產(chǎn)線吸塵機器人是為了清除傳送帶上的灰塵而研發(fā)的。為了提高產(chǎn)線智能機器人的效率,節(jié)約能源,產(chǎn)線智能吸塵上安裝了一個攝像頭用來采集傳送帶上灰塵的圖片,圖片經(jīng)過處理后,根據(jù)實時圖像與模板圖像的相似程度來控制產(chǎn)線吸塵機器人的吸塵力度。吸塵力度等級如表2所示。
用產(chǎn)線智能吸塵機器人在傳送帶上隨機進行了多次吸塵實驗,圖7-10在日間傳送帶無光照的條件下灰塵濃度不同的情況下拍攝的。圖11-12在夜晚光照強度分別為300lux、400lux的條件下拍攝的,吸塵前后的效果圖如下圖所示。
此外,在灰塵濃度相同的傳送帶上,模板圖與有灰塵圖像的相似度如表4:
由表3可以看出,日間無光照條件下,本文算法計算得到的無灰塵圖像和模板圖的相似度大于文獻[3]的相似度,更接近1,與文獻[3]算法相比,本文算法檢測無灰塵圖像的相似度值的精度更高。由表4可以看出,日間無光照條件下,本文算法計算得到的有灰塵圖像和模板圖的相似度小于文獻[3]的相似度,與文獻[3]算法相比,本文算法在檢測有灰塵圖像的相似度值時,檢測的精度高于文獻[3]算法。由表5發(fā)現(xiàn),不同光照條件下,計算模板圖與無灰塵圖像的相似度,本文算法計算的相似度大于文獻[3]的相似度,可知,本文的算法檢測精度較高,光照較低時,出現(xiàn)了相似度低于90%的情況,說明光照較暗會影響檢測的相似度。
采用灰塵傳感器檢測出灰塵濃度,數(shù)據(jù)經(jīng)過處理后傳給STM32單片機,然后測量值在顯示器上顯示出來。經(jīng)過傳感器檢測后,可得吸塵口塵粒的濃度為[Cv],出口的灰塵和碎屑濃度為[Cc],產(chǎn)線智能吸塵機器人的吸塵效率為:
由表6可以看出,日間無光照條件下,攝像頭采集到圖片后,STM32單片機對傳送過來的圖像信號進行處理,由小波變換和GLCM算法檢索圖像紋理特征,計算得到相似度S后,根據(jù)相似度S控制機器人的吸塵強度,本文算法能較準(zhǔn)確的匹配圖像的相似度,合理控制機器人的吸塵力度,通過控制直流電機的轉(zhuǎn)速并調(diào)整吸塵口風(fēng)速,能有效節(jié)約能源,經(jīng)過產(chǎn)線吸塵機器人吸塵多次實驗后,測量所得產(chǎn)線吸塵機器人的吸塵效率在93%以上。
本文創(chuàng)新點在于,產(chǎn)線智能吸塵機器人的底座與產(chǎn)線無縫配合,使用3D打印技術(shù)制作部分構(gòu)件,實現(xiàn)自動化吸塵。利用Sobel算子對傳送帶灰塵圖像進行邊緣檢測,把圖像處理技術(shù)和產(chǎn)線吸塵技術(shù)結(jié)合起來指導(dǎo)吸塵。與文獻[3]相比,本文提出了基于小波變換和灰度共生矩陣算法檢索圖像的紋理特征,提高了檢測的精度,能有效控制產(chǎn)線機器人的吸塵力度,進而節(jié)約機器人的能源。把吸塵效率作為吸塵的量化評價指標(biāo),經(jīng)過多次實驗測試,產(chǎn)線機器人具有比較高的吸塵效率。
5 結(jié)語
本文設(shè)計了一種產(chǎn)線智能吸塵機器人,該機器人能夠?qū)⑤斔蛶系臍堅鼟咂穑⑽綑C器人中,此外,對攝像頭采集的圖像進行處理,利用Sobel算子對傳送帶圖像進行邊緣檢測,基于小波變換和灰度共生矩陣算法對圖像進行匹配,來控制機器人的吸塵力度,解決了產(chǎn)線上人工清掃難度大、效率低下、易磨損的問題,提高了清潔傳送帶的效率,該機器人經(jīng)實際產(chǎn)線環(huán)境測試后,沿傳送帶吸塵效果良好,具有比較高的吸塵效率,在工業(yè)上有很大的應(yīng)用前景。但是,在光照較暗的情況下,相似度精確度沒光照強的條件下高。今后還需進一步解決的問題是,使產(chǎn)線吸塵機器人在弱光的情況下仍能有較高的精確度,提高算法的抗干擾性。
參考文獻:
[1] 劉士林.基于內(nèi)容的圖象檢索[J].佳木斯大學(xué)學(xué)報(自然科學(xué)版),2001,19(3):257-259.
[2] Ma W,Zhang H. Content-based Image Indexing and Retrieval[M]. Handbook of Multimedia Computing. Boca Raton: CRC Press,1999: 227-254.
[3] 茅靳豐,朱國棟,張虎,等.風(fēng)管清掃機器人智能清潔度評估系統(tǒng)的研究[J].建筑熱能通風(fēng)空調(diào),2015,34(1):37-41.
[4] 田金文.小波基本問題探討[J].中國圖像圖形學(xué)報,2002,7:613-618.
[5] 高程程,惠曉威.基于灰度共生矩陣的紋理特征提取[J].計算機系統(tǒng)應(yīng)用,2010,19(6):195-198.
[6] 李宗學(xué),范文學(xué),賈翠玲,等.基于ARM處理器的吸塵機器人硬件設(shè)計[J].現(xiàn)代電子技術(shù),2013,36(12):103-105.
[7] 肖嘉池.基于單片機的工業(yè)機器人控制器設(shè)計[J].電腦知識與技術(shù),2019,15(22):263-264.
[8] 王建元,郭威,劉洋,等.基于圖像識別的移動機器人自動完成充電[J].電測與儀表,2017,54(10):103-107.
[9] 張建軍,李鐵.基于紋理特征的圖像檢索系統(tǒng)設(shè)計[J].長沙大學(xué)學(xué)報,2009,23(2):83-85.
[10] 陳剛,李弼程,莊軍.一種有效的簽名圖像預(yù)處理方法[J].計算機應(yīng)用研究,2006,23(4):177-179,192.
[11] Campilho A,Kamel M. Image Analysis and Recognition[M]. Image analysis and recognition:Springer,2011: 917-919.
【通聯(lián)編輯:唐一東】
