幅寬自動控制清秸防堵裝置設計與試驗
2021-04-13 09:25:40周文琪王金武
農業機械學報 2021年3期
關鍵詞:作業
王 奇 唐 漢 周文琪 王金武
(東北農業大學工程學院,哈爾濱 150030)
0 引言
清秸防堵裝置是保護性耕作系統中免耕模式和條帶耕作模式必不可少的工作部件,具有清理播種行內殘留秸稈、為開溝和播種作業環節準備清秸苗帶的功能[1-3]。清潔一致的苗帶寬度和合理的秸稈拋擲距離能夠提高后續播種作業質量和工作效率[4-6],促進作物生長和產量提高[7-9]。因此,清秸防堵裝置已成為精密播種技術研究重點。
對置雙盤式清秸防堵裝置具有土壤擾動小、保墑效果好、作業阻力低等優點,已被廣泛用在免耕播種機和條帶耕整機上[1]。目前,國內外學者主要通過改進清秸盤結構和優化工作參數來提高苗帶清秸率[10-15],對秸稈橫向拋擲的合理距離和幅寬穩定性控制的研究較少。相關研究表明,輪盤間距和工作偏角等工作參數影響清秸裝置的作業質量,參數應始終保持在合理范圍內,從而確保作業性能的可靠性[11,16-17];通過增加配重塊、彈簧、氣壓系統和液壓系統等方法對清秸裝置進行入土深度控制,在一定程度上能夠提高裝置仿形能力和作業性能穩定性,但并不能根據免耕復雜地況變化主動調節裝置的作業幅寬,無法保證作業幅寬穩定性[18-19]。
本文以設計的星齒凹盤式清秸防堵裝置為研究載體,對其工作參數進行理論分析和仿真優化,運用S型拉壓力傳感器和電動直線推桿協同作用設計幅寬自動控制系統,在保證清秸率的前提下實時調控清秸幅寬和秸稈橫向移動最大距離,并通過田間試驗驗證優化結果和控制系統設計的合理性,以期為同類工作部件的設計提供參考。
1 農藝要求
對置雙盤式清秸防堵裝置作業時,清秸盤將預清理條帶內的秸稈向兩側推移和拋擲,如圖1所示。圖中RS為播種時玉米種植理論行距;RW為條帶清理理論寬度;Dl為秸稈橫向移動距離的合理區間;D為實際秸稈橫向移動最大距離。因此,在作業過程中應始終避免清秸裝置將本行內清理的秸稈拋擲到相鄰行的預清理條帶區域,以防止相鄰行的作業負擔增加、苗帶清秸率降低的現象發生。
東北地區采用免耕覆蓋種植模式下進行玉米免耕播種作業的技術要求,免耕播種機作業時對土壤擾動需小于田面的30%,且應為播種作業準備出15~25 cm的播種區[20-21]。東北地區玉米常規壟壟距為65 cm。因此,秸稈橫向移動距離范圍應為15~50 cm。
2 整體結構與工作原理
幅寬自動控制清秸防堵裝置結構如圖2所示,由固定架、平行四桿架、星齒凹面清秸盤和作業幅寬自動控制系統組成,其中作業幅寬自動控制系統由 S型壓力傳感器、電動直線推桿、連接件和幅寬控制器組成,S型壓力傳感器和電動直線推桿通過連接件相連組成壓力監控單元,其兩端分別與固定架和平行四桿架鉸接,幅寬控制器固定安裝在機架上。
該裝置作業前,根據地況條件和作業幅寬要求,通過幅寬控制器設定清秸裝置的目標幅寬(即S型壓力傳感器的目標監測壓力),使清秸盤在重力和下壓力的作用下插入秸稈層并與預定深度的土壤層接觸,達到設定作業幅寬。作業時,隨著拖拉機的前進方向運動;通過微控制器將實時讀取的壓力傳感器輸出信號轉換為對應的幅寬,當實測幅寬偏離設定的幅寬閾值范圍時,單片機控制電動推桿做出相應伸長或收縮,使清秸裝置在設定的作業幅寬下穩定運行;清秸盤在機具的拉力和土壤的反作用力共同形成的力偶作用下繞定軸進行被動轉動,將清秸盤外側的秸稈殘茬沿著其外表面向條帶兩側推移,且秸稈橫向移動距離逐漸增加,當秸稈運動到清秸盤與地面交接的末端時,秸稈在旋轉的清秸盤對其產生的合力的作用下沿著星齒部分的凹曲面的切線方向被側向拋出;被拋擲的秸稈在慣性力和自身重力的作用下落在所清理條帶的兩側,從而形成清潔一致的條帶。
3 關鍵部件設計
3.1 工作參數分析
清秸防堵裝置的關鍵工作部件為星齒凹面清秸盤[14]。圖3為清秸盤垂直狀態入土深度為h時,其與土壤間相對位置的簡圖,點m、n分別為清秸盤與地面的兩個交點。由圖3可知,清秸盤與地表相交線段Lmn長度可表示為
(1)
式中r——清秸盤半徑,mm
γ——清秸盤和地面交點與垂直方向夾角,(°)
當清秸盤與前進方向的工作偏角為α,且與豎直平面的工作傾角為β時,以清秸盤圓心為坐標原點,建立Oxyz空間直角坐標系,其中x軸為機具前進方向,y軸為與機具前進方向垂直的水平方向,z軸為豎直方向,如圖4所示。

于是,單個清秸盤的有效作業幅寬b′和y方向的漏清區域c′為
(2)
(3)
該清秸防堵裝置采用交錯對置的形式進行清秸盤的布置,如圖5所示。
根據式(2)和式(3)將星齒凹面盤式清秸防堵裝置的理論作業幅寬和兩個清秸盤間的理論漏清區域表示為
(4)
式中LB——清秸裝置理論作業幅寬,mm
LC——清秸裝置理論漏清寬度,mm
e——兩個清秸盤間交點的水平距離(兩清秸盤重疊時為負值;否則為正值),mm
整理得
(5)
由式(5)可知,該清秸防堵裝置的作業幅寬LB和理論漏清寬度LC的尺寸取決于清秸盤半徑r、入土深度h、工作偏角α、工作傾角β和2個清秸盤間交點的水平距離(即兩個清秸盤中心的水平距離L)。
綜合上述分析,結合東北地區玉米生產實際情況,春季播種時覆蓋在地表的秸稈層厚度為40~50 mm,常規壟壟距為650 mm,為提高清秸盤轉動效率,設定清秸盤入土深度h為20 mm,星齒凹面清秸盤半徑r為152.5 mm。綜合上述設計要求,參考圓盤犁和圓盤耙的工作偏角[22],經計算,確定各參數取值范圍為90 mm≤L≤195 mm、15°≤α≤30°、10°≤β≤25°。
3.2 幅寬自動控制系統設計
由式(5)可知,當清秸裝置各項參數確定后,其作業幅寬只與清秸盤入土深度有關。在相同工況和入土深度條件下,清秸盤對地壓力穩定在一個范圍內[23-24],基于此開發幅寬自動控制系統,其主要由S型壓力傳感器、電動直線推桿和幅寬控制器等組成,如圖6所示。
S型壓力傳感器為清秸盤對地壓力檢測元件,電動直線推桿為幅寬調節執行部件,二者通過連接件相連組成壓力監控單元,其兩端分別與固定架和平行四桿架鉸接。為了避免受環境影響清秸裝置需實時調節,其受力分析簡圖如圖7所示。
對清秸裝置進行受力分析可得
FcosδLopcosθ=FNLoqcosθ
(6)
其中
式中F——電動直線推桿輸出支持力,N
δ——由于外界影響導致壓力監控單元與鉛錘方向間夾角,(°)
Lop——兩連桿鉸接點和傳感器與連桿鉸接點間線段長度,mm
FN——清秸裝置受到地表支持力,N
Loq——水平連桿鉸接點間線段長度,mm
θ——由于外界影響水平連桿與水平面間夾角,(°)
根據清秸裝置結構尺寸計算,當清秸輪相對初始水平位置單向變動30 mm(實際作業中)時,δ對應變化值為0.17°,可近似表示為
F=3FN
(7)
因此,可以通過監測清秸裝置作業過程中清秸盤的對地壓力,實時調控清秸盤入土深度,進而實現對作業幅寬的自動控制,提高幅寬穩定性。
系統主要硬件原理如圖8所示,其中,標號U1為微控制器,采用STM32F103ZET6單片機,其工作頻率可達72 MHz,I/O口及內部資源豐富,滿足設計需求;標號P1為S型壓力傳感器,其信號輸出端S+和S-通過變送放大器后分別與單片機的ADC輸入引腳PA1、PA2相連接;標號K1、K2為型號相同的兩個繼電器,用于控制電動推桿的伸縮變換,二者的控制端分別與單片機的I/O引腳PG6、PG7相連,公共端分別與電動推桿的兩個信號線相連接,常閉端與24 V電源連通,常開端接地。當單片機在PG6引腳輸出高電平、PG7引腳輸出低電平時,電動推桿做伸長運動;反之,電動推桿做收縮運動;而當PG6和PG7為相同電平(高電平或低電平)時,電動推桿不動作。標號S1~S2為按鍵模塊,標號U2為液晶顯示模塊,二者共同實現人機交互功能。
S型壓力傳感器為杭州美控自動化技術有限公司生產的MIK-LCS1-100kg型傳感器,其測量精度誤差為0.1%,測量量程為100 kg;采用的變送放大器型號為HSTL-BLSM,可將壓力傳感器的輸出值變換到電壓0~5 V范圍。幅寬自動控制系統實物如圖9所示。
系統軟件設計流程如圖10所示。系統開始工作后,首先初始化系統時鐘、I/O口及相關寄存器,并采用數組形式存儲清秸裝置作業幅寬與S型壓力傳感器輸出檢測值之間的轉換參數;之后,STM32單片機讀取S型壓力傳感器輸出信號的A/D轉換值Vad,并根據存儲的轉換參數將Vad換算成對應的幅寬Bt,此時的幅寬Bt即為實時檢測幅寬。當實時檢測幅寬Bt大于設定的作業幅寬閾值B0時,STM32單片機將計算出對應的差值ΔB(ΔB=Bt-B0),并據此控制電動推桿作出相應地收縮,使清秸裝置回到設定的作業幅寬;反之,當Bt小于B0時,STM32單片機根據二者差值ΔB(ΔB=B0-Bt),使電動推桿伸長相應的行程,以保持裝置按設定幅寬進行作業。同時,相關信息(如設定幅寬B0和實時檢測幅寬Bt等)將在液晶顯示屏上予以顯示。
4 離散元仿真試驗與分析
運用離散元仿真軟件EDEM建立作業部件-土壤-秸稈間作用模型對清秸防堵裝置田間作業環境進行模擬,分析影響其作業性能的主要因素,從而尋求最優工作參數組合。
4.1 離散元模型建立
為合理有效地進行仿真模擬與計算,對清秸防堵裝置模型進行簡化處理,去除其工作過程中無關的部件。運用三維制圖軟件Creo 對清秸防堵裝置進行實體建模(比例1∶1),以.igs格式導入EDEM軟件Geometry項中,仿真模型如圖11所示。設置仿真模型的材質屬性為45號鋼,泊松比為0.31,剪切模量為7.0×1010Pa,密度為7 800 kg/m3。
為簡化模型,采用直徑為8 mm的球體作為土壤顆粒模型[25-26],設定土壤顆粒力學關系模型為Hertz-Mindlin with bonding模型,泊松比為0.38,剪切模量為1.0×106Pa,密度為1 850 kg/m3;國家標準GB/T 24675.6—2009《保護性耕作機械秸稈粉碎還田機》要求玉米秸稈粉碎長度不大于100 mm,并且根據田間粉碎秸稈實際尺寸采用8個直徑為20 mm、球心間距為10 mm的球體組成的長為90 mm的長線性模型作為秸稈顆粒模型,設定秸稈顆粒力學關系模型為Hertz-Mindlin無滑動接觸模型,泊松比為0.4,剪切模量為1.0×106Pa,密度為241 kg/m3。根據文獻[26]得到仿真材料的接觸參數如表1所示。
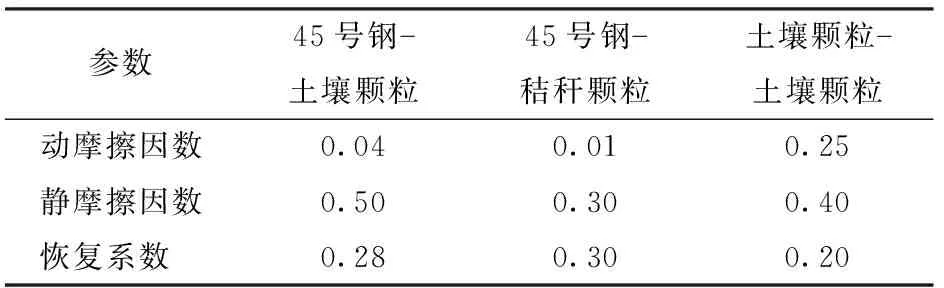
表1 仿真材料的接觸參數Tab.1 Contact parameters of simulated materials
為模擬實際田間清秸作業狀態,運用EDEM軟件建立虛擬土槽,根據該地區春季播種前田間秸稈覆蓋情況,設定土壤層厚度為50 mm,秸稈層厚度為40 mm,設置土槽基本尺寸(長×寬×高)為2 000 mm×650 mm×90 mm,將其設定為虛擬顆粒工廠,保證槽內存有充足顆粒進行仿真,如圖12所示。在生成土壤顆粒過程中,使其僅在重力作用下自由沉降,且整體生成后在顆粒群上方加載校準土壤密度所需的垂直載荷,進行土壤模型壓實,使仿真與實際土壤保持一致。
4.2 虛擬仿真過程
在虛擬仿真過程中,設置清秸防堵裝置位于土槽一側進行初始作業。根據機具實際作業狀態及免耕播種農藝要求,設置該裝置前進速度為2.22 m/s、清秸盤入土深度為20 mm。為保證仿真的連續性,設置其固定時間步長為Rayleigh時間步長的15%,網格尺寸設置為土壤顆粒尺寸的2倍,數據導出時間間隔為0.01 s,以便對后續數據精準處理。仿真過程如圖13所示。
4.3 試驗設計
為提高試驗的可控性及準確性,根據理論分析結果選取清秸盤間距、工作偏角和工作傾角為試驗因素,使用Design-Expert軟件進行三因素四水平正交試驗,選用L16(45)正交表[27-28],不考慮3個因素間的交互作用,因素和水平如表2所示。
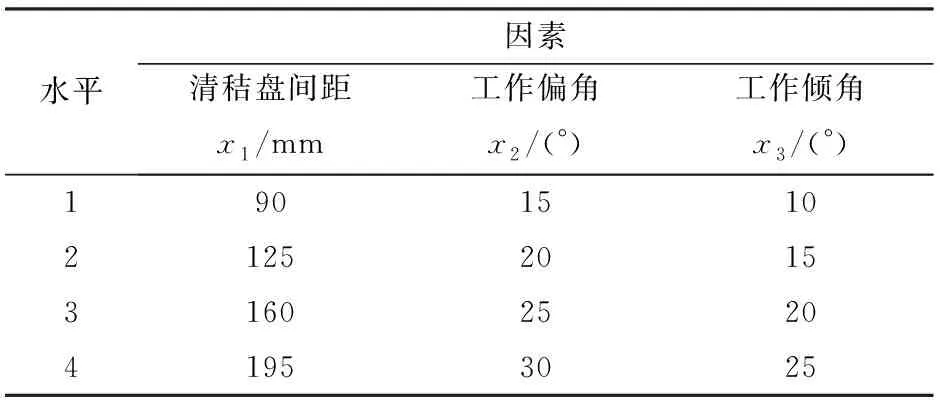
表2 試驗因素水平Tab.2 Test factors and levels
由于目前國內外尚無評價苗帶清秸作業質量的統一標準,通過查閱相關資料并結合實際玉米免耕播種作業技術要求[29-31],選取苗帶清秸率和秸稈橫向移動最大距離為試驗指標。
利用EDEM軟件獲得的solve report模塊,可得建立的秸稈顆粒在仿真作業前后的數量變化,提取作業前后線框區域內秸稈顆粒數量,如圖14所示。
利用EDEM軟件的后處理功能輸出帶有尺寸基準的圖片,再利用Adobe Photoshop軟件添加實際尺寸標尺,讀取被拋擲秸稈在標尺上的數值,即為秸稈橫向移動最大距離D,如圖15所示。每組試驗隨機選取位置記錄5個數據并計算平均值,記為試驗結果。
4.4 試驗結果與分析
試驗方案與結果如表3所示,A、B、C為因素水平值。
在滿足實際免耕播種作業要求的條帶清秸寬度范圍內,苗帶清秸率越高,則綜合作業性能越好。由表3極差分析可知,影響苗帶清秸率指標的3個主次因素順序為:工作偏角B、清秸盤間距A、工作傾角C,其較優參數水平組合為A1B4C4;影響秸稈橫向移動最大距離的3個主次因素順序為:清秸盤間距A、工作偏角B、工作傾角C,當參數組合為A1B1C4和A4B4C1時,分別為秸稈橫向移動最大距離的最小值和最大值。根據實際田間生產作業要求及該清秸裝置自身特點,確定影響該清秸裝置綜合作業性能的主次順序因素為:工作偏角B、清秸盤間距A、工作傾角C。

表3 試驗方案與結果Tab.3 Test plan and results
清秸裝置作業時,主要依靠清秸盤的被動轉動將與之接觸的地表殘留秸稈推移和拋擲到苗帶兩側。兩個清秸盤的間距越大,則產生的漏清區域越大,使兩個清秸盤間有越多的秸稈無法與清秸盤相接觸,因此苗帶清秸率隨著清秸盤間距的增加而降低。工作偏角越大,清秸盤有效作業幅寬也隨之增加,使漏清間距減小,提高了秸稈與清秸盤的有效接觸面積,所以隨著工作偏角的增加,清秸率升高。工作傾角的增大,使清秸盤向內側傾斜,減小了漏清間距,使清秸率增加。
清秸盤間距越大,使秸稈脫離清秸盤的初始位置和秸稈被拋起后最終的下落位置越遠離清秸裝置的中心,因此,增加了秸稈的橫向移動距離。工作偏角越大,同樣使秸稈脫離清秸盤的初始位置與清秸裝置中心的間距增加,同時增大的清秸盤偏角使秸稈與盤面間的相互作用更加強烈,且盤面對拋出秸稈的導流作用,使秸稈橫向移動距離增大。工作傾角的分析與工作偏角相似,但是由于工作傾角向內側傾斜,則使得秸稈橫向移動最大距離隨工作傾角的增加而減小。
為準確判斷各因素水平對作業質量影響的顯著性,運用Design-Expert 6.0.10軟件對正交試驗結果進行顯著性判斷,其顯著水平設定為0.01,方差分析計算結果如表4所示。
由表4可知,方差分析結果與上述極差分析相符合,即工作偏角和清秸盤間距對苗帶清秸率和秸稈橫向移動最大距離影響極顯著;工作傾角對苗帶清秸率和秸稈橫向最大移動距離影響顯著。
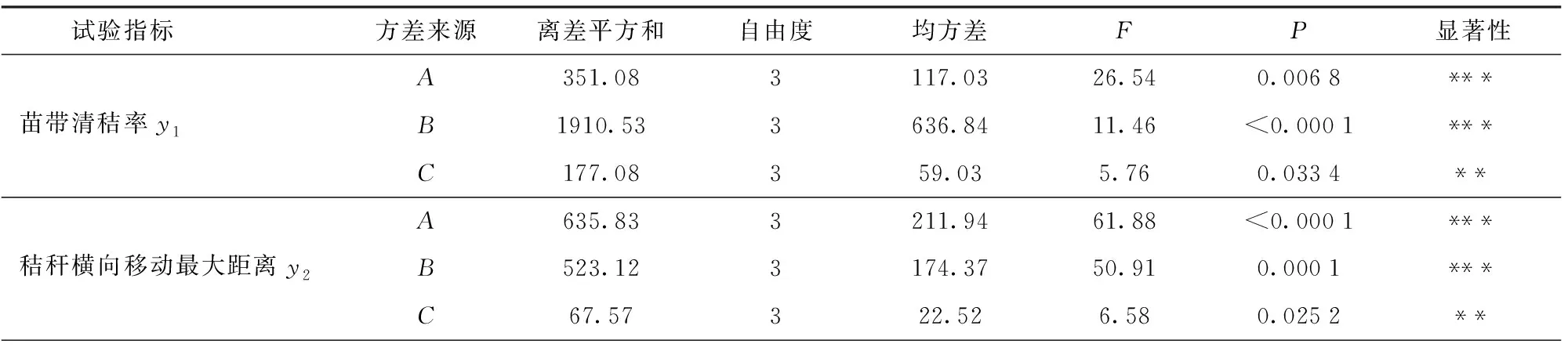
表4 試驗方差分析Tab.4 Analysis of test variance
4.5 試驗優化
為得到清秸裝置最佳工作參數組合,對試驗因素進行優化設計,遵循在秸稈橫向拋擲不發生相互影響條件下提高苗帶清秸率的原則,采用多目標變量優化方法,結合試驗因素邊界條件,建立非線性規劃參數模型為
(8)
基于Design-Expert 6.0.10軟件中的多目標參數優化(Optimization)模塊對數學模型進行分析求解,可得多組優化參數組合,綜合分析并從優化結果中選取一組合理參數組合為A1B4C2,即清秸盤間距為90 mm、工作偏角為30°、工作傾角為15°時,該裝置苗帶清秸率為93.2%,秸稈橫向移動最大距離為40.3 mm。
5 田間試驗
5.1 試驗條件
試驗在2018年10月于吉林大學農學部試驗田進行,土壤類型屬于中國東北典型黑黏土,試驗期間日平均氣溫為12~16℃,幾乎無降雨。試驗地前茬作物為玉米,秋季收獲時進行了全量秸稈粉碎覆蓋還田(地上部分的玉米秸稈被全部粉碎并均勻地平鋪在地表上),粉碎秸稈長度為8~12 cm。試驗地塊0~100 mm深度內,土壤堅實度為0.985 MPa,容積密度為1.21 g/cm3,含水率為24.6%,溫度為11.8℃。
5.2 試驗設計
幅寬自動控制清秸防堵裝置性能試驗前,進行作業幅寬-清秸盤對地壓力檢測的標定試驗,獲取二者之間的對應關系。試驗時,不開啟幅寬自動控制系統,使用LabView系統程序,通過USB66530數據采集卡對S型壓力傳感器進行測試和數據存儲;記錄機具穩定運行50 m內的數據,通過Excel電子表格將采集數據換算為清秸盤對地壓力,并計算平均值和標準差。試驗過程中,調整星齒凹面清秸輪入土深度為20 mm,并分別設定機具前進速度為6、8、10、12 km/h進行條帶清秸作業,在各種速度工況下重復3次。試驗情況如圖16所示。
為考察幅寬自動控制清秸防堵裝置的作業性能,進行田間性能檢測試驗,并與安裝仿形彈簧條件下進行對比試驗。試驗用清秸裝置工作參數為:清秸盤間距為90 mm、工作偏角為30°、工作傾角為15°,仿形彈簧參數為:線徑為5 mm、中心徑為30 mm、有效圈數為22。試驗前,調整星齒凹面清秸輪入土深度為20 mm,調節所得標定結果設置檢測初始值。試驗過程中,分別設定播種機具以6、8、10、12 km/h進行條帶清秸作業。每組試驗的作業行程為50 m,其中包括兩端預留的10 m調整區和中間穩定工作的30 m數據采集區,在各種速度工況下重復3次,試驗情況如圖17所示,被測清秸防堵裝置如圖18所示。
5.3 試驗指標
由于目前國內外尚無評價條帶清秸作業質量的統一標準,通過查閱相關資料及條帶耕作技術要求,選取苗帶清秸率、清秸幅寬穩定性系數和秸稈橫向移動最大距離為田間試驗的評價指標。
(1)苗帶清秸率
使用電子天平稱量苗帶清秸幅寬內殘留秸稈質量,并與該區域試驗前秸稈質量作比值,計算苗帶清秸率,在穩定工作區內間隔1 m連續采集20個測點的數據,采樣如圖19a所示。
(2)清秸幅寬穩定性系數
將鋼板尺與機組前進方向垂直放置,測量清秸行兩側清理區域與未清理區域界線間距,記為清秸幅寬值,測點與苗帶清秸率測點相同,測定方法如圖19b所示。計算式為
(10)
其中
(11)
(12)
式中aj——第j個行程幅寬平均值,cm
aji——第j個行程中第i個點的幅寬,cm
nj——第j個行程中測定點數
Uj——第j個行程中幅寬穩定性系數
Sj——第j個行程幅寬標準差,cm
(3)秸稈橫向移動最大距離
使用鋼板尺測量被拋擲秸稈到清秸區中心的最大距離,記為秸稈橫向移動最大距離,測點與苗帶清秸率測點相同,記錄數據并計算平均值,測定方法如圖19c所示。
5.4 試驗結果
5.4.1標定試驗結果與分析
作業幅寬-清秸盤對地壓力檢測值標定試驗結果如圖20所示。由于地表秸稈覆蓋不均勻和土壤緊實度不同等因素,使同一速度條件下被測裝置在作業工程中的受力主要集中在某一數值范圍內變化,并且隨著前進速度升高,清秸盤對地壓力呈上升趨勢,這與其他土壤耕作部件的結論相似[32-33]。
根據標定試驗結果,以平均值為初始閾值,誤差精度設置為15%,設定幅寬自動控制系統的初始閾值及范圍如表5所示。
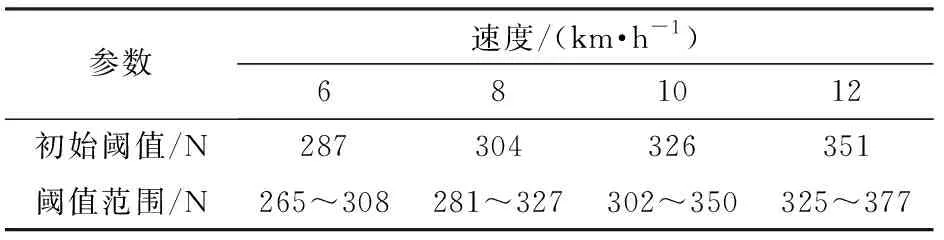
表5 幅寬自動控制系統的初始閾值及范圍Tab.5 Initial threshold and range of automatic width control system
5.4.2田間性能檢測試驗結果與分析
幅寬自動控制清秸防堵裝置的田間性能檢測試驗結果如表6所示。
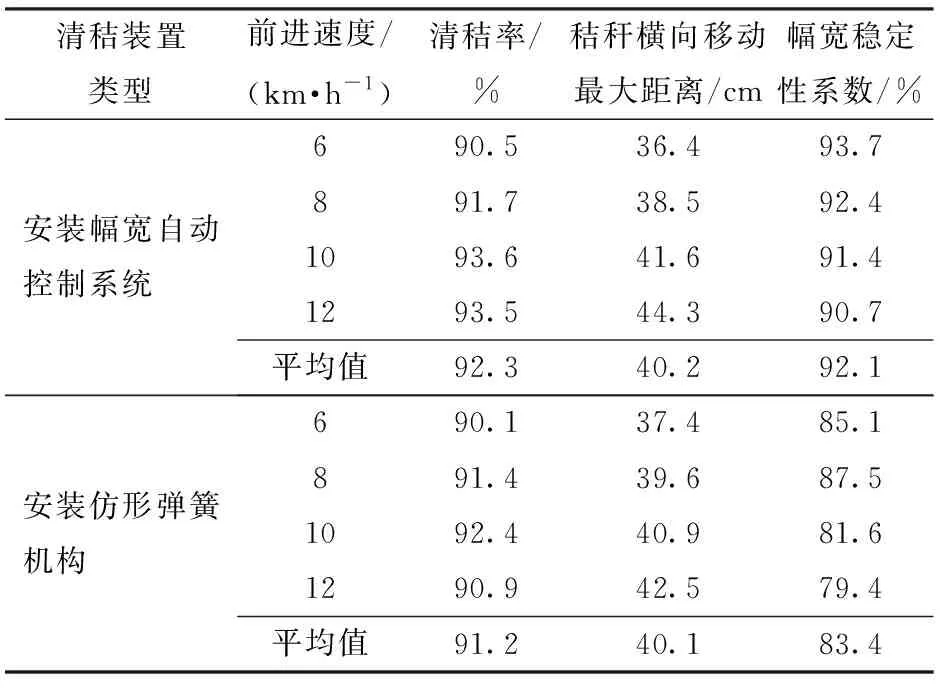
表6 幅寬自動控制清秸防堵裝置田間試驗結果Tab.6 Field test results of automatic control row cleaners
由表6可知,在相同工況下,隨著前進速度增加,清秸率和秸稈橫向移動最大距離呈上升趨勢,而幅寬穩定性系數呈降低趨勢,原因可能是前進速度增加使清秸盤的轉速升高,增大了其與秸稈的相互作用力和對秸稈的拋擲效率。對比試驗結果可知,幅寬自動控制系統對幅寬穩定性系數具有極顯著性影響(P<0.01),兩種處理相差8.7 個百分點,有效提高幅寬的穩定性。通過與仿真試驗結果進行對比分析可知,田間作業質量與仿真試驗優化結果基本一致,但是田間秸稈橫向移動最大距離略小于仿真試驗結果,產生誤差的原因可能是仿真環境過于理想,而田間秸稈的含水率和容積密度更大,所需拋擲能量更多,但誤差在可接受范圍內。田間試驗結果表明,幅寬自動控制清秸防堵裝置具有較高的清秸作業質量,清秸率高達92.3%,幅寬穩定性系數高達92.1%,能夠適應東北地區大秸稈覆蓋量的作業地況,清理的條帶滿足玉米種植作業的農藝要求。
6 結論
(1)設計了一種幅寬自動控制清秸防堵裝置,該裝置能夠實時監控清秸幅寬,其清秸率高,秸稈拋擲距離合理,工作性能穩定,作業后地表滿足免耕播種作業要求。
(2)對清秸裝置工作參數進行了理論分析,得出影響其作業性能的主要工作參數為清秸盤間距L、工作偏角α和工作傾角β,確定了各參數的取值范圍為90 mm≤L≤195 mm、15°≤α≤30°、10°≤β≤25°。仿真試驗表明,影響裝置綜合作業性能的主次因素順序為:清秸盤間距、工作偏角和工作傾角,最優參數組合為L=90 mm、α=30°和β=15°。
(3)運用S型壓力傳感器和電動直線推桿協同作用設計了幅寬自動控制系統,通過監控清秸盤對地壓力實時調節其作業幅寬。通過田間試驗,得到了各速度水平下作業幅寬與作業阻力間的對應關系。
(4)田間試驗表明,幅寬自動控制系統能夠有效提高幅寬穩定性,幅寬穩定性系數提高了8.7個百分點;該裝置苗帶清秸率為92.3%,秸稈橫向移動最大距離為40.2 mm,幅寬穩定性系數為92.1%,具有較高的清秸作業質量,能夠適應東北地區大秸稈覆蓋量下的作業地況,清理的條帶滿足玉米種植作業的農藝要求。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
