電客車牽引制動架控與車控研究
2021-04-11 14:56:02青島地鐵集團有限公司運營分公司岳遠洋杜廣林
電子世界 2021年6期
青島地鐵集團有限公司運營分公司 岳遠洋 杜廣林
隨著我國地鐵行業的蓬勃發展,為緩解交通壓力,地鐵成為最關鍵的交通工具。而地鐵的運行安全與車輛性能密不可分,因此地鐵車輛的可靠性越來越引起人們的重視。在地鐵牽引系統控制方式的實際選擇中,通常要考慮地鐵列車編組、線路條件、技術性能和成本等因素。本文通過介紹青島地鐵1號線、青島地鐵13號線地鐵電客車車控與架控在牽引系統、制動系統、車下設備、故障影響等方面,從而對比地鐵車輛架控與車控的區別。
青島地鐵車輛牽引系統主要由牽引電機、VVVF牽引逆變器箱、制動電阻箱、濾波電阻器箱及斷路器箱等組成。牽引系統高壓回路電器主要集成在斷路器箱和VVVF牽引逆變器箱,主要有主隔離開關、高速斷路器、線路接觸器、濾波電抗器和牽引變流裝置等元件或部件。牽引母線電器主要集成在母線高斷箱,主要由母線接觸器和母線高速斷路器等組成。
制動系統采用微機控制的直通式電空制動系統,可以使用司機控制器,對地鐵列車進行制動與緩解。車輛制動系統包括:防滑控制裝置、制動控制裝置、基礎制動裝置、空氣彈簧裝置等組成。
1 牽引系統車控、架控簡介
1.1 車控
如1號線電客車為6輛編組設置,頭車兩TC車為拖車,中間四輛M車為動車(如圖1所示)。每輛動車的轉向架設置兩根動軸,每根動軸有一臺牽引電機。每臺VVVF牽引逆變器控制一輛車兩臺動力轉向架上的四臺牽引電機(如圖2所示),此為牽引系統的車控式。

圖1 車控圖
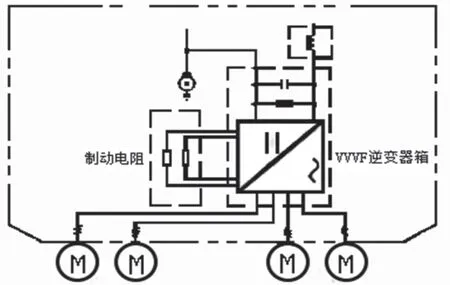
圖2 車控原理
1.2 架控
如13號線電客車為4輛編組設置,頭車兩TMC車為動拖車,中間2輛M車為動車(如圖3所示)。每臺動車的轉向架設置2根動軸,每根動軸有1臺牽引電機,每臺VVVF牽引逆變器控制1臺動力轉向架上的2臺電機(如圖4所示),此為牽引系統的架控式。

圖3 架控圖
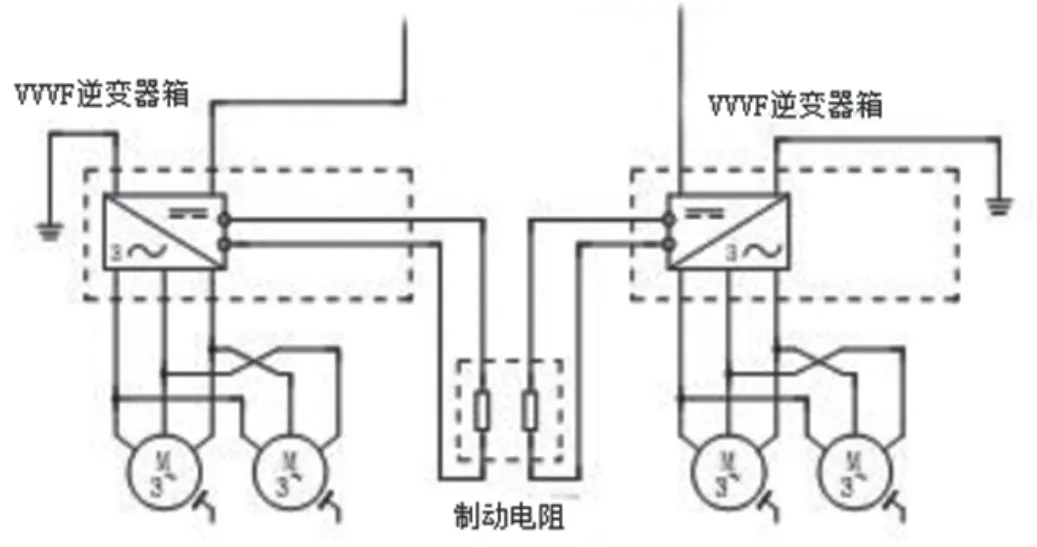
圖4 架控原理
2 牽引制動配合邏輯
(1)列車制動時,EP2002制動系統中兩個CAN總線單元內的主網關閥接收網絡傳輸的制動狀態指令和制動大小指令,根據其他EP2002閥傳入的各個轉向架載荷情況,計算整列車需求的制動力大小;通過網絡給牽引系統發出電制動請求,主網關閥根據DCU返回的實際電制動力大小進行計算,從而決定是否需要補充空氣制動及補充空氣制動的大小。
(2)牽引控制單元DCU接收到電制動指令后將開始進行電制動,按照0.75m/s3的速率進行上升,并將實際發揮電制動力反饋給EBCU;在制動起始時刻,DCU通過TCMS發送1.5s的電制動可用數值給制動系統,制動系統在1.5S按照實際的電制動力進行計算。
3 不同控制方式與不同制動的配合
3.1 牽引為架控+制動為車控
當轉向架電制動力失效,使用空氣制動時,避免因制動力過度疊加而導致車輪抱死。在某些情況下,需要切斷故障車輛另一個轉向架的電制動力,造成電制動力的浪費,增加了機械制動的磨損。因此這種方法很少采用。
3.2 牽引為車控或架控+制動為架控
VVVF牽引逆變器故障不會導致轉向架上制動力的疊加,電空制動的匹配性能好。
3.3 牽引為車控+制動為車控
單節車VVVF牽引逆變器故障,制動力全部為空氣制動,制動力不會疊加。
4 列車車下的比較
通過對車下設備的比較,得出車控式列車中每節動車只使用了一臺VVVF牽引逆變器,車底剩余空間較大,設備布局更合理;而架控所使用的VVVF牽引逆變器數量多于車控,車底的空間比較緊密。
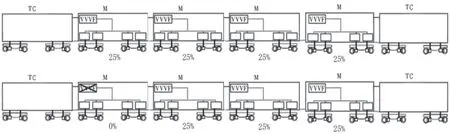
圖5 車控式制動系統制動力損失示意圖
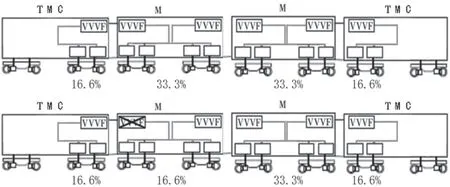
圖6 架控式式制動系統制動力損失示意圖
5 故障影響及冗余性
5.1 車控式
每輛車有一套制動控制單元,對于小編組車輛來說,安全性影響比較大。如圖5所示,其動拖比為2:1,若其中一套制動系統故障,則列車會損失整車25%的制動力,其制動距離也會延長,此時列車需要限速,清客,回庫檢修。
如果列車牽引采用車控方式,部件故障使得整輛列車故障的幾率較小。如一列青島地鐵1號線列車在AW3工況下,以100 km/h的速度行駛,其最大牽引力為180kN,行駛過程中一臺VVVF牽引逆變器故障,列車剩余135kN的動力。
5.2 架控式
每輛車有2套制動控制單元,對于小編組列車,一套制動系統故障,列車僅失去單個轉向架的制動力。如圖6所示,其動拖比為1:1,若其中一套制動系統故障,則列車會損失整車16.6%的制動力,對制動距離的影響較小。
如果列車牽引采用架控方式,相對車控每節動車增加了一臺VVVF牽引逆變器,將會增加整車發生故障的幾率。當一臺VVVF牽引逆變器發生故障時,該節車只喪失了16.6%的動力。如一列青島地鐵13號線列車在AW3工況下,以120km/h的速度行駛,其最大牽引力為180kN,行駛過程中一臺VVVF牽引逆變器故障,列車剩余150kN的動力。
總結:架控列車因單節動車要增加一臺VVVF牽引逆變器,采購和維護成本增加,車下空間緊張,但牽引性能強,且故障時能保存較多動力。車控列車車下VVVF逆變器較少,當發生故障時損失動力較多,但維護故障點相對較少。車控列車相比較而言維護成本低,且車下可擴展性較強。對于制動系統來說,車控的制動系統較優于架控制動系統,但架控制動系統的控制精度高于車控的制動系統,在控制原理上有更強的安全性和可靠性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
汽車維修與保養(2019年7期)2020-01-06 03:30:42
制造技術與機床(2019年12期)2020-01-06 03:17:46
西南交通大學學報(2018年5期)2018-11-08 10:58:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道運營技術(2015年3期)2015-12-23 09:27:14