面向無人機(jī)協(xié)助的WSNs 的數(shù)據(jù)收集策略*
2021-04-08 08:46:44李春若鄒子賢
傳感技術(shù)學(xué)報(bào) 2021年1期
關(guān)鍵詞:信號(hào)
李春若鄒子賢
(江西財(cái)經(jīng)職業(yè)學(xué)院南昌校區(qū)信息中心,江西 南昌331700)
節(jié)點(diǎn)能量有限阻礙了拓展無線傳感網(wǎng)絡(luò)(Wireless Sensor Networks,WSNs)的應(yīng)用[1]。 部署在惡劣或者特殊環(huán)境中的節(jié)點(diǎn),即使電池電量消耗殆盡,也很難再給節(jié)點(diǎn)充電或者更換電池。 作為一項(xiàng)新興技術(shù),能量捕獲有望成為解決WSNs 能量受限問題的希望[1]。
相比于太陽能、風(fēng)能等綠色能源,節(jié)點(diǎn)從空間中的射頻信號(hào)中捕獲能量更穩(wěn)定。 太陽能、風(fēng)能隨環(huán)境變化的波動(dòng)較大,捕獲的能量不穩(wěn)定。 節(jié)點(diǎn)通過從射頻信號(hào)中捕獲能量,進(jìn)而對(duì)電池充電是補(bǔ)給節(jié)點(diǎn)能量的不錯(cuò)選擇。 實(shí)驗(yàn)表明,當(dāng)Powercast 射頻發(fā)射機(jī)以915 MHz 的頻率工作時(shí),在距離發(fā)射機(jī)11 m的射頻信號(hào)中可以捕獲3.5 mW 的無線功率[2]。
因此,將射頻能量捕獲(Radio Frequency Energy Harvesting,RF-EH)技術(shù)[3]應(yīng)用于WSNs,可以緩解節(jié)點(diǎn)能量受限問題,拓展WSNs 的應(yīng)用。 如無線電能傳輸(Wireless Power Transfer,WPT)、同步信息和電能傳輸(Simultaneous Information and Power Transfer,SIPT)均是目前被廣泛關(guān)注的RF-EH 技術(shù)。
多數(shù)WSNs 應(yīng)用要求節(jié)點(diǎn)將自己感測(cè)的數(shù)據(jù)傳輸至信宿(Sink)。 因此,有效的數(shù)據(jù)收集策略可提升WSNs 的擴(kuò)展性和效率。 近期,由于移動(dòng)便捷、部署靈活,無人機(jī)(Unmanned Aerial Vehicle,UAV)通信已成為滿足下一代蜂窩用戶需求的有效技術(shù)[4-5]。
將UAVs 用于WSNs,通過UAVs 收集數(shù)據(jù),可提高降低數(shù)據(jù)傳輸時(shí)延,提高數(shù)據(jù)傳輸效率。 因此,基于UAV-協(xié)助的WSNs 受到研究者的廣泛關(guān)注[6-9]。
然而,由于位于同區(qū)域的節(jié)點(diǎn)所感測(cè)的數(shù)據(jù)具有相似性,若每個(gè)節(jié)點(diǎn)都借助UAV 向Sink 傳輸數(shù)據(jù),多數(shù)能量將浪費(fèi)于這些相似數(shù)據(jù)的傳輸。 在多數(shù)場(chǎng)景,鄰居節(jié)點(diǎn)感測(cè)的數(shù)據(jù)存在相似性,這些數(shù)據(jù)存在一定的冗余。 為引用簇技術(shù)。 將網(wǎng)絡(luò)內(nèi)節(jié)點(diǎn)劃分不同的簇,每個(gè)簇由一個(gè)簇頭(Cluster Head,CH)。 CH 先收集并處理本簇內(nèi)節(jié)點(diǎn)的數(shù)據(jù),再將數(shù)據(jù)傳輸至UAV。 即只有CH 與UAV 直接通信。
為此,本文針對(duì)UAV 協(xié)助的無線電能的WSNs網(wǎng)絡(luò), 提出時(shí)隙優(yōu)化的數(shù)據(jù)收集(Time Slot Optimizing data-gathering,TODG)策略。 TODG 策略采用電力包給節(jié)點(diǎn)進(jìn)行無線電能充電,同時(shí)引用無人機(jī)協(xié)助數(shù)據(jù)傳輸。 為了減少能耗,采用簇結(jié)構(gòu),由簇頭與無人機(jī)進(jìn)行通信,同時(shí),無人機(jī)向簇頭補(bǔ)給能量。 通過優(yōu)化時(shí)隙的分配,降低中斷概率,并提高了系統(tǒng)吞吐量。
節(jié)點(diǎn)能量有限阻礙了拓展無線傳感網(wǎng)絡(luò)(Wireless Sensor Networks,WSNs)的應(yīng)用[1]。 部署在惡劣或者特殊環(huán)境中的節(jié)點(diǎn),即使電池電量消耗殆盡,也很難再給節(jié)點(diǎn)充電或者更換電池。 作為一項(xiàng)新興技術(shù),能量捕獲有望成為解決WSNs 能量受限問題的希望[1]。
相比于太陽能、風(fēng)能等綠色能源,節(jié)點(diǎn)從空間中的射頻信號(hào)中捕獲能量更穩(wěn)定。 太陽能、風(fēng)能隨環(huán)境變化的波動(dòng)較大,捕獲的能量不穩(wěn)定。 節(jié)點(diǎn)通過從射頻信號(hào)中捕獲能量,進(jìn)而對(duì)電池充電是補(bǔ)給節(jié)點(diǎn)能量的不錯(cuò)選擇。 實(shí)驗(yàn)表明,當(dāng)Powercast 射頻發(fā)射機(jī)以915 MHz 的頻率工作時(shí),在距離發(fā)射機(jī)11 m的射頻信號(hào)中可以捕獲35 mW 的無線功率[2]。
因此,將射頻能量捕獲(Radio Frequency Energy Harvesting,RF-EH)技術(shù)[3]應(yīng)用于WSNs,可以緩解節(jié)點(diǎn)能量受限問題,拓展WSNs 的應(yīng)用。 如無線電能傳輸(Wireless Power Transfer,WPT)、同步信息和電能傳輸(Simultaneous Information and Power Transfer,SIPT)均是目前被廣泛關(guān)注的RF-EH 技術(shù)。
多數(shù)WSNs 應(yīng)用要求節(jié)點(diǎn)將自己感測(cè)的數(shù)據(jù)傳輸至信宿(Sink)。 因此,有效的數(shù)據(jù)收集策略可提升WSNs 的擴(kuò)展性和效率。 近期,由于移動(dòng)便捷、部署靈活,無人機(jī)(Unmanned Aerial Vehicle,UAV)通信已成為滿足下一代蜂窩用戶需求的有效技術(shù)[4-5]。
將UAVs 用于WSNs,通過UAVs 收集數(shù)據(jù),可提高降低數(shù)據(jù)傳輸時(shí)延,提高數(shù)據(jù)傳輸效率。 因此,基于UAV-協(xié)助的WSNs 受到研究者的廣泛關(guān)注[6-9]。
然而,由于位于同區(qū)域的節(jié)點(diǎn)所感測(cè)的數(shù)據(jù)具有相似性,若每個(gè)節(jié)點(diǎn)都借助UAV 向Sink 傳輸數(shù)據(jù),多數(shù)能量將浪費(fèi)于這些相似數(shù)據(jù)的傳輸。 在多數(shù)場(chǎng)景,鄰居節(jié)點(diǎn)感測(cè)的數(shù)據(jù)存在相似性,這些數(shù)據(jù)存在一定的冗余。 為引用簇技術(shù)。 將網(wǎng)絡(luò)內(nèi)節(jié)點(diǎn)劃分不同的簇,每個(gè)簇由一個(gè)簇頭(Cluster Head,CH)。 CH 先收集并處理本簇內(nèi)節(jié)點(diǎn)的數(shù)據(jù),再將數(shù)據(jù)傳輸至UAV。 即只有CH 與UAV 直接通信。
為此,本文針對(duì)UAV 協(xié)助的無線電能的WSNs網(wǎng)絡(luò), 提出時(shí)隙優(yōu)化的數(shù)據(jù)收集(Time Slot Optimizing data-gathering,TODG)策略。 TODG 策略采用電力包給節(jié)點(diǎn)進(jìn)行無線電能充電,同時(shí)引用無人機(jī)協(xié)助數(shù)據(jù)傳輸。 為了減少能耗,采用簇結(jié)構(gòu),由簇頭與無人機(jī)進(jìn)行通信,同時(shí),無人機(jī)向簇頭補(bǔ)給能量。 通過優(yōu)化時(shí)隙的分配,降低中斷概率,并提高了系統(tǒng)吞吐量。
1 網(wǎng)絡(luò)模型
考慮如圖1 所示的UAV 協(xié)助的無線電能的WSNs 網(wǎng)絡(luò)。 網(wǎng)絡(luò)內(nèi)有n個(gè)節(jié)點(diǎn),m個(gè)電力包(Power Beacon,PBs)。 引用文獻(xiàn)[10]的分簇算法,將n個(gè)節(jié)點(diǎn)劃分為k個(gè)簇,每個(gè)簇產(chǎn)生一個(gè)CH。 無人機(jī)沿著CH 的上空移動(dòng),分別收集CH 的數(shù)據(jù)。圖中的藍(lán)色帶箭頭的虛線表示無人機(jī)移動(dòng)路線。 圖1 中只考慮了四個(gè)簇。
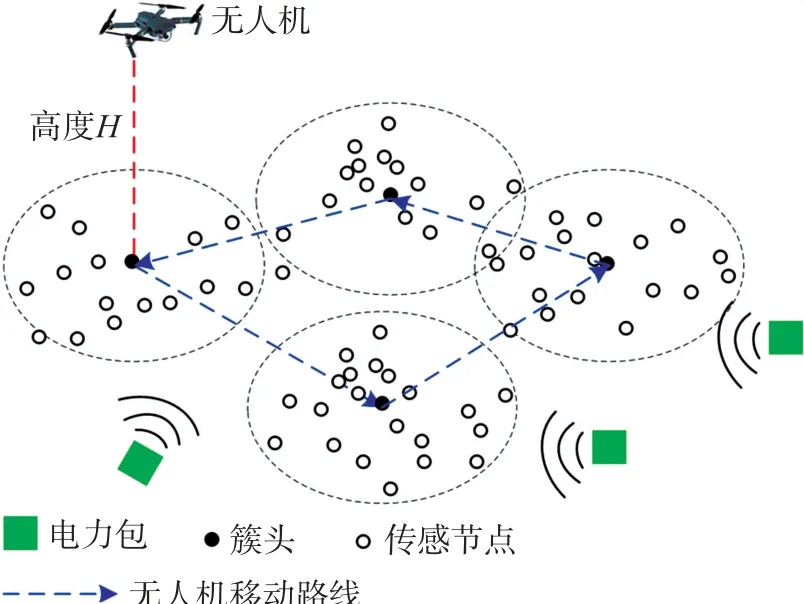
圖1 網(wǎng)絡(luò)模型
假定所有節(jié)點(diǎn)裝備了能夠充電的電池,它們可存儲(chǔ)電能。 假定所有節(jié)點(diǎn)的初始能量并不足于感測(cè)或傳輸數(shù)據(jù)。
n個(gè)傳感節(jié)點(diǎn)形成一個(gè)CH。 假定節(jié)點(diǎn)與CH的信道為瑞利衰落信道;CH 與UAV 通信的信道萊斯信道。
將整個(gè)操作時(shí)間T劃分四個(gè)時(shí)隙。 劃分為四個(gè)時(shí)隙的原因在于:整個(gè)操作細(xì)分為四個(gè)動(dòng)作:①節(jié)點(diǎn)對(duì)電池充電;②選擇簇頭及傳輸信息;③補(bǔ)給能量;④簇頭向無人機(jī)傳輸數(shù)據(jù)。 為了有序地執(zhí)行這四個(gè)動(dòng)作,就將時(shí)間T劃分為四個(gè)時(shí)隙。
第一時(shí)隙時(shí)長(zhǎng)為αT/2(0<α<1);在第一時(shí)隙內(nèi),節(jié)點(diǎn)接收來自PBs 的WPT 信號(hào),對(duì)電池進(jìn)行充電;第二時(shí)隙的時(shí)長(zhǎng)也為αT/2。 在第二個(gè)時(shí)隙內(nèi)完成CH 選擇和信息傳輸。 將第二個(gè)時(shí)隙細(xì)分為兩個(gè)子時(shí)隙,分別用于CH 的選擇和信息的傳輸,且時(shí)長(zhǎng)分別為αT/6 和αT/3,如圖2 所示。
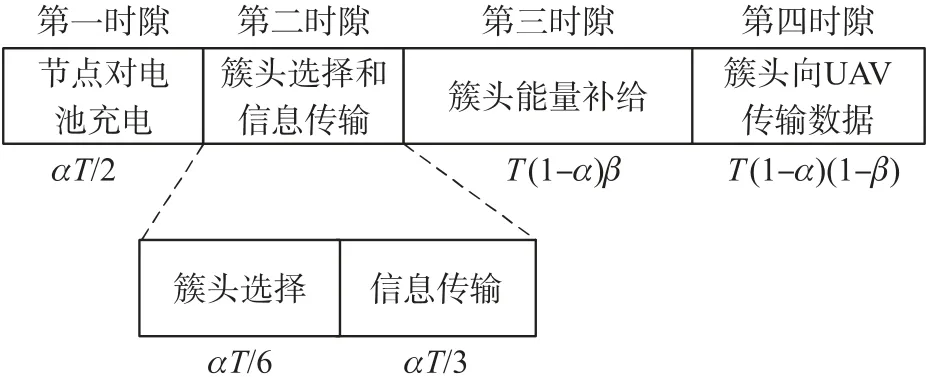
圖2 時(shí)隙結(jié)構(gòu)
在第三個(gè)時(shí)隙,CH 接收來自UAV 的WPT 信號(hào),補(bǔ)充能量,且時(shí)長(zhǎng)為T(1-α)β(0<α<1)。 在最后一個(gè)時(shí)隙,CH 向UAV 傳輸數(shù)據(jù),且時(shí)長(zhǎng)為T(1-α)(1-β)。 在該時(shí)隙內(nèi),CH 將觀察的數(shù)據(jù)進(jìn)行融合處理,傳輸至UAV。
2 CH 和UAV 接收的信號(hào)
2.1 CH 接收的信號(hào)
令Pj表示在第一個(gè)時(shí)隙αT/2 內(nèi)jth的PB 的傳輸功率,其中j∈1,2,…,m。 假定PBs 傳輸?shù)男盘?hào)相互獨(dú)立[11]。 令Ei表示ith節(jié)點(diǎn)在αT/2 內(nèi)所采集的總能量:

式中:ω表示路徑損耗指數(shù);di,j表示ith節(jié)點(diǎn)與內(nèi)jthPB 間距離;η表示ith節(jié)點(diǎn)的能量轉(zhuǎn)換效率。
一旦ith節(jié)點(diǎn)電能充滿,ith節(jié)點(diǎn)就從環(huán)境收集數(shù)據(jù),再向CH 傳輸數(shù)據(jù)。 假定在αT/3 內(nèi),每個(gè)節(jié)點(diǎn)傳輸功率為:

在第二時(shí)隙結(jié)束后,CH 已收到來自n個(gè)節(jié)點(diǎn)傳輸?shù)臄?shù)據(jù)。 令yCH表示CH 在第二時(shí)隙結(jié)束后所收到的信號(hào):

式中:表示節(jié)點(diǎn)i與CH 間的衰減系數(shù);si表示節(jié)點(diǎn)i傳輸?shù)臍w一化調(diào)制信號(hào);nCHi表示節(jié)點(diǎn)i與CH 間信道的AWGN 噪聲,且的均值為零,方差為。
2.2 UAV 接收的信號(hào)
CH 接收簇內(nèi)節(jié)點(diǎn)數(shù)據(jù)后,就在第三個(gè)時(shí)隙內(nèi)進(jìn)行充電。 即在T(1-α)β內(nèi),CH 從UAV 傳輸?shù)腞F-WPT 信號(hào)捕獲能量。 令ECH表示CH 從UAV 接收的能量:

式中:Pu表示UAV 的傳輸功率;ηu表示能量轉(zhuǎn)換效率;gu表示UAV 與CH 間的衰減系數(shù);ρu=k/dw u表示UAV 與CH 間路徑衰減因子,其中k、w是路徑衰減指數(shù);du表示UAV 與CH 間距離。
結(jié)合式(1)至式(4),可計(jì)算CH 的傳輸功率:

依據(jù)式(3)和式(5),UAV 接收的信號(hào)yUAV:

式中:nu表示CH 與UAV 間的AWGN 噪聲,且其均值為零,方差為。
3 基于中斷概率最小化的時(shí)隙比例α的優(yōu)化
3.1 中斷概率
先令隨機(jī)變量X1,X2和X3分別表示信道幅度增益的平方,即和
當(dāng)UAV 處的端到端信噪比(Signal Noise Ratio,SNR)小于閾值γ0,則UAV 與CH 間信號(hào)就中斷。因此,先計(jì)算UAV 處的端到端的SNR 小于閾值γ0的概率,其定義如式(7)所示:
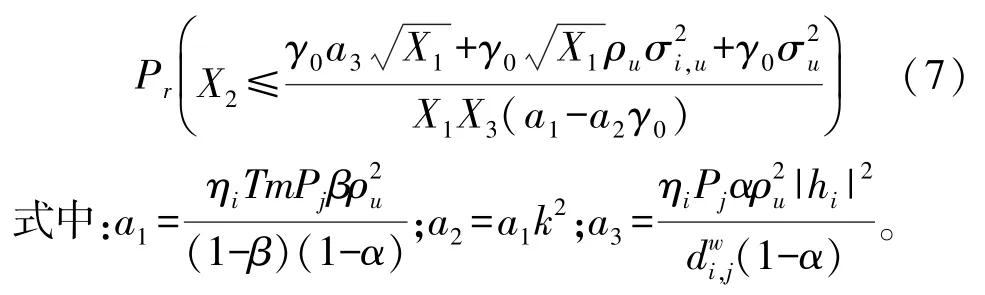
令Pout表示UAV 與CH 間信號(hào)中斷的概率,其定義如式(8)所示:
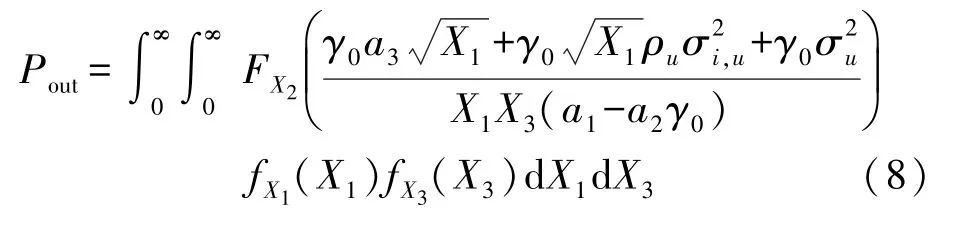
式中:F(·)表示累加分布函數(shù)(Cumulative Distribution Function,CDF);FX2(X2)=1-exp(-X2/Ωi)。 其中Ωi表示平均信道SNR 值,即Ωi=E(X2)。
m個(gè)分布式瑞利隨機(jī)變量之各可表述為Nakagami-m的隨機(jī)過程[12]。 因此,概率密度函數(shù)fX3(X3)可表述為:

式中:表示平均信道SNR 值,即最后的概率密度函數(shù)可表示為:
式中:K表示Rician K-factor,其視距直射信號(hào)(LoS)和發(fā)散路徑之間的線性比值,被廣泛用于描述萊斯信道的特征;Kυ(·)表示第二類階修正貝塞爾函數(shù);Γ(x)表示Gamma 函數(shù)。
此外,通過整合變量X3,將式(8)的雙重積分簡(jiǎn)化一重積分。 最終,可得Pout:
3.2 吞吐量
依據(jù)式(11)的中斷概率,UAV 可獲取的吞吐量:

式中:R表示節(jié)點(diǎn)傳輸速率。
3.3 時(shí)隙比例α 的優(yōu)化
以最小化中斷概率為目的,推導(dǎo)最優(yōu)的時(shí)隙比例α:
式中:S表示簇內(nèi)的節(jié)點(diǎn)數(shù);A表示簇內(nèi)的活動(dòng)節(jié)點(diǎn)數(shù);表示節(jié)點(diǎn)i被選為CH 時(shí)的總的能量;Ci表示節(jié)點(diǎn)i被選成為CH 的標(biāo)量。 若Ci=1,表示節(jié)點(diǎn)i成為CH;若Ci=0,表示節(jié)點(diǎn)i未被選成為CH;式(15)約束了只有一個(gè)節(jié)點(diǎn)被選為簇頭。 P1 的優(yōu)化問題屬凸優(yōu)化問題[13],其通過CVX 工具求解。
4 性能分析
4.1 仿真環(huán)境
在Windows 7 操作系統(tǒng)、8GB 內(nèi)存,core i7 CPU的PC 上進(jìn)行實(shí)驗(yàn)。 利用MATLAB 軟件建立仿真平臺(tái)。 在200 m×200 m 區(qū)域內(nèi)部署400 個(gè)節(jié)點(diǎn)(n=400)和6 個(gè)PBs(m=3)。 將400 個(gè)節(jié)點(diǎn)分成10 個(gè)簇。 具體的仿真參數(shù)如表1 所示。
表1 仿真參數(shù)
4.2 α 對(duì)中斷概率的影響
本小節(jié)分析時(shí)隙率α對(duì)平均的端到端中斷概率的影響。 圖3 給出在每個(gè)PBs 傳輸功率為{30,50,80}dBm 時(shí),平均中斷概率隨α的變化情況。

圖3 時(shí)隙率α 對(duì)中斷概率的影響
從圖3 可知,PBs 傳輸功率的增加,有利于降低中斷概率。 原因在于:傳輸功率越大,給節(jié)點(diǎn)補(bǔ)給的能量越多。 此外,在PBs 一定時(shí),當(dāng)時(shí)隙率α的較小時(shí),增加α可以降低中概率,但是當(dāng)時(shí)隙率α大于0.7 后,中斷概率又隨α的增加而上升。 這說明存在最優(yōu)α值,使中斷概率保持最低。
圖4 給出吞吐量隨時(shí)隙率α的變化情況。 從圖可知,當(dāng)時(shí)隙率α較小時(shí)(小于0.6),時(shí)隙率α的增加,使吞吐量快速增加。 當(dāng)時(shí)隙率α達(dá)到0.6 時(shí),吞吐量達(dá)到最大值。 隨后,吞吐量隨時(shí)隙率α的增加而下降。 此外,PBs 傳輸功率的增加,有利于提升吞吐量,這符合預(yù)期。 PBs 傳輸功率越大,節(jié)點(diǎn)的能量越充足,收集的數(shù)據(jù)越多。
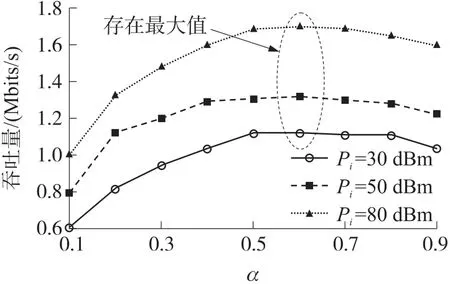
圖4 時(shí)隙率α 對(duì)吞吐量的影響
5 總結(jié)
針對(duì)由無線電能供電的WSNs,本文研究了基于UAV 協(xié)助的數(shù)據(jù)收集方案。 節(jié)點(diǎn)由PBs 供電。推導(dǎo)了最小化中斷概率和最大化吞吐量的時(shí)隙分配率。 仿真結(jié)果證實(shí)了推導(dǎo)工作的正確性。 后期,將考慮多個(gè)簇的網(wǎng)絡(luò)結(jié)構(gòu),并分析UAV 的移動(dòng)路徑對(duì)吞吐量的影響。 同時(shí),考慮UAV 的能量消耗問題。即依據(jù)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu),優(yōu)化UAV 移動(dòng)路徑,減少UAV 的能量消耗,這將是未來的研究?jī)?nèi)容。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06
