狄克遜檢驗法濾波RSSI 的室內(nèi)定位算法*
2021-04-08 08:46:00王建強(qiáng)代陽雷倩芳
傳感技術(shù)學(xué)報 2021年1期
王建強(qiáng)代 陽雷倩芳
(東華理工大學(xué)測繪工程學(xué)院,江西 南昌330013)
隨著無線網(wǎng)絡(luò)通信技術(shù)的發(fā)展,無線傳感網(wǎng)絡(luò)(Wireless Sensor Network,WSN)節(jié)點定位成為現(xiàn)階段室內(nèi)位置服務(wù)的研究熱點。 目前解決WSN 節(jié)點定位的主要技術(shù)方法是基于測距定位和非測距定位[1],測距算法包括接收信號強(qiáng)度指示(Received Signal Strength Indication,RSSI)、到達(dá)時間差(Time Difference of Arrival,TDOA)、到達(dá)時間(Time of Arrival,TOA)和到達(dá)角(Angle of Arrival,AOA)[2],非測距算法包括質(zhì)心算法[3]。 綜合考慮系統(tǒng)部署難易程度、硬件成本以及精度等因素,基于Wi- Fi、藍(lán)牙RSSI 室內(nèi)定位技術(shù)仍然是主流研究熱點。
基于RSSI 的室內(nèi)定位技術(shù)是WSN 節(jié)點定位中最經(jīng)典的方法之一,該方法包括RSSI 測距模型和定位算法兩部分,大量學(xué)者對其進(jìn)行了深入研究。 針對RSSI 測距模型,任克強(qiáng)等[4]利用高斯濾波對RSSI 觀測數(shù)據(jù)進(jìn)行優(yōu)化,根據(jù)接入點(Access Point,AP)間距離和RSSI 值動態(tài)修正RSSI 模型參數(shù),從而提高測距精度,但該方法忽略了偏離高斯分布的RSSI 異常值對濾波結(jié)果的影響;李楨等[5]利用基于M 估計的抗差kalman 濾波方法估計信號強(qiáng)度,得到相對穩(wěn)定的無線信號,但是抗差濾波需要大量樣本數(shù)據(jù)且算法較為復(fù)雜。 針對RSSI 定位算法部分,Xue 等[6]對不均勻空間分辨率下的RSSI 進(jìn)行物理距離加權(quán)定位,通過對短時間內(nèi)的RSSI 觀測值做均值處理,利用RSSI 物理距離差分定權(quán),最終平均定位精度維持在3 m~6 m 之間;唐宗山等[7]提出了一種基于最大似然估計的RSSI 定位算法,通過信號差分改進(jìn)最小二乘定位算法,實現(xiàn)了15 m 范圍內(nèi)平均定位精度2 m 左右。 上述改進(jìn)方法在一定程度上可以提高RSSI 定位精度,但利用物理距離加權(quán)易受測距模型參數(shù)誤差影響,無線信號也并不嚴(yán)格服從高斯分布,對定位精度的提升效果并不明顯。 因而有必要探索更為接近無線信號傳播規(guī)律的濾波模型。
針對RSSI 異常值以及測距模型參數(shù)誤差等問題,本文采用狄克遜檢驗法[8]濾波RSSI 進(jìn)行高斯牛頓[9]定位(Dixon text Filter RSSI Gauss-Newton,DFRSSI-GN)。 根據(jù)RSSI 偏態(tài)分布[10]來衡量其偏斜程度從而利用狄克遜檢驗法剔除RSSI 異常值,得到近似服從高斯分布的信號,該濾波算法可以同時檢測一維觀測信號兩端的異常值,且易于抗差Kalman 濾波算法;再對修正后的RSSI 進(jìn)行高斯均值濾波,采用非線性回歸模型[11]確定信號衰減模型參數(shù),通過濾波后的RSSI 確定目標(biāo)點各個方向的權(quán)值進(jìn)行高斯牛頓迭代定位。
1 RSSI 測距模型
基于RSSI 的測距原理是根據(jù)無線信號衰減模型[12]將發(fā)射端與接收端之間的信號強(qiáng)度利用對數(shù)模型轉(zhuǎn)化為距離,可表示為

Pr表示在室內(nèi)空間中到信號發(fā)射端任意距離d處接收端獲取的信號強(qiáng)度,一般用RSSI 表示;Pr0表示距離信號發(fā)射端d0=1 m 處的信號強(qiáng)度,用A代替;n表示環(huán)境衰減因子;ξ表示服從(0,μ2)分布的環(huán)境遮蔽因子,在實際計算中常用0 代替。 所以信號發(fā)射端與接收端的距離可由式(1)簡化為

2 RSSI 濾波處理及參數(shù)估計
就RSSI 定位而言,節(jié)點定位的精度取決于信號強(qiáng)度觀測樣本質(zhì)量的好壞。 對于復(fù)雜環(huán)境的室內(nèi)環(huán)境下,利用RSSI 進(jìn)行定位需要對觀測樣本數(shù)據(jù)進(jìn)行濾波處理以及測距模型參數(shù)的確定。
2.1 偏度分析
偏度是統(tǒng)計觀測樣本數(shù)據(jù)偏斜方向和程度的度量,通過判斷偏度大小確定信號的分布[13]情況。 對于一組RSSI 觀測樣本數(shù)據(jù)可表示為:

則RSS 的偏度可表示為

式中:μ,σ分別表示RSSI 值的期望和方差

當(dāng)Skew(RSSI)=0 時,樣本數(shù)據(jù)為正態(tài)分布;Skew(RSSI)<0 時,樣本數(shù)據(jù)左偏;Skew(RSSI)>0時,樣本數(shù)據(jù)右偏。
2.2 狄克遜檢驗法混合濾波
狄克遜檢驗法是采用極差比的方法檢驗觀測數(shù)據(jù)中最大值最小值是否為異常值。 具體步驟如下:
①將RSSI 觀測樣本按照從小到大順序依次排列得到rssi1<rssi2<…<rssin,假設(shè)檢驗顯著水平α=0.05,則臨界值為D(α,n);
②檢驗高端異常值γ11和低端異常值:

式中:rssie是距最大值rssin最近且不等的樣本數(shù)據(jù)值;rssif是距最小值rssi1最近且不等的樣本數(shù)據(jù)值。
④剔除RSSI 觀測樣本中的異常值后重復(fù)步驟①~步驟③,直到未檢測到異常值。
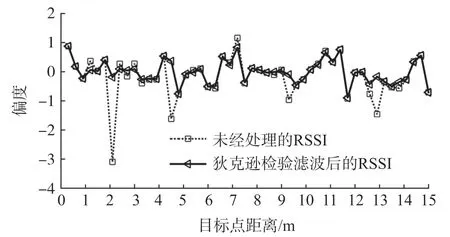
圖1 狄克遜檢驗法處理前后偏度對比
通過狄克遜檢驗法剔除RSSI 異常值能有效降低樣本數(shù)據(jù)偏度,記為RSSI-D。 對建立測距模型的RSSI 數(shù)據(jù)做偏度態(tài)統(tǒng)計分析,從圖1 看出狄克遜檢驗法濾波后的偏度明顯降低,此時RSSI-D更加近似服從正態(tài)分布,可再次進(jìn)行高斯均值濾波處理。
RSSI-D近似服從(μ,σ2)正太分布,密度函數(shù)為

式中:

將落在(μ2-3σ2,μ2+3σ2)的RSSI-Di作為高斯濾波輸出值[14],記為RSSI-DG,利用均值濾波對高斯濾波輸出值進(jìn)行均值處理,最后得到高斯-均值濾波輸出值RSSIfilter。

2.3 參數(shù)估計
RSSI 測距算法精度取決于參數(shù)A,n的選擇。傳統(tǒng)測量方法中一般將n用經(jīng)驗值進(jìn)行代替。 為了保證測距的精度,通過對室內(nèi)某個藍(lán)牙標(biāo)簽不同距離下的信號進(jìn)行連續(xù)觀測建立測距模型;對不同距離下得到的RSSI 序列采用本文方法進(jìn)行處理;再利用非線性回歸模型對參數(shù)進(jìn)行多次擬合估計,進(jìn)而得到符合環(huán)境的衰減模型參數(shù)A,n。 當(dāng)剩余觀測值與第i次擬合曲線間的平均誤差小于0.5 dBm 時,即可將第i次擬合參數(shù)作為輸出值輸出。
3 Gauss-Newton 定位模型
在室內(nèi)布設(shè)M(M>4)個藍(lán)牙標(biāo)簽和N個目標(biāo)點,并建立獨立室內(nèi)坐標(biāo)系,通過測量技術(shù)獲取藍(lán)牙標(biāo)簽和目標(biāo)點位置信息。 將藍(lán)牙標(biāo)簽的坐標(biāo)記為APm=(am,bm),(m=1,2…M),假設(shè)第n個目標(biāo)點坐標(biāo)為RPn=(xn,yn),(n=1,2…N),該點對第m個藍(lán)牙標(biāo)簽觀測信號強(qiáng)度為RSSImn=(rssimn1,rssimn2,…,rssimnk),通過濾波處理后代入式(2)得到目標(biāo)點和藍(lán)牙標(biāo)簽間距離為dm,則該目標(biāo)點的觀測方程為

一般用X=(x,y)T表示目標(biāo)點坐標(biāo)的真值,但在實際實驗過程中真值無法獲取,所以常用估值代替真值;L=(d1,d2…dM)T表示目標(biāo)點和藍(lán)牙標(biāo)簽間距離是觀測方程的非線性函數(shù)的向量表示;V=(vx,vy)T為目標(biāo)點坐標(biāo)的改正數(shù)向量,得到非線性誤差方程

當(dāng)M=3 時,可根據(jù)三邊定位[15]算法計算目標(biāo)點的初始位置Xo=(S-1t)/2,其中

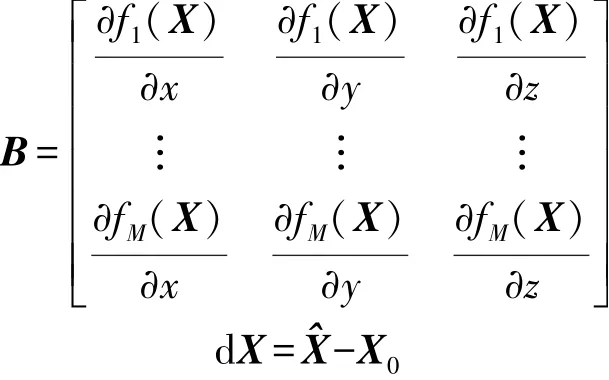
Gauss-Newton 迭代法基本出發(fā)點是對非線性誤差方程(8)在目標(biāo)點初始位置X0處線性化,并按照最小二乘[16]估計一次近似值X1,再以X1為近似值進(jìn)行反復(fù)迭代,直到前后兩次VTPV值相等。 對于非線性誤差方程(8)在X0處存在一階連續(xù)偏導(dǎo),且目標(biāo)點的坐標(biāo)分量之間相互獨立,在該點按照Taylor 展開[17]取至一次項,得誤差方程

式中:B是f(X)對X的雅克比矩陣,dX表示估值和初始值的誤差向量,即
考慮到目標(biāo)點到藍(lán)牙標(biāo)簽的距離取決于RSSI觀測量,若選用距離作為權(quán)因子,會受到信號衰減模型中參數(shù)誤差的影響,所以本文選擇用濾波后的信號強(qiáng)度對目標(biāo)點到藍(lán)牙標(biāo)簽的距離進(jìn)行加權(quán),權(quán)因子記為ωk,權(quán)矩陣記為P

在X=X0處根據(jù)最小二乘原理可得

根據(jù)X1為近似值繼續(xù)迭代,其迭代公式為

當(dāng)(VTPV)K=(VTPV)K+1時,停止迭代。
目標(biāo)點估計位置與真實位置間的距離可作為精度衡量指標(biāo),即

4 實驗與分析
實驗數(shù)據(jù)來源于“UPINLBS2019 室內(nèi)定位比賽”的實測數(shù)據(jù)。 在一條長65 m,寬3 m,高3.94 m的走廊搭建藍(lán)牙室內(nèi)定位環(huán)境,選取場景內(nèi)的14 個藍(lán)牙標(biāo)簽和6 個目標(biāo)點,實測數(shù)據(jù)包括獨立坐標(biāo)系下藍(lán)牙標(biāo)簽和目標(biāo)點的相對坐標(biāo),各個目標(biāo)點連續(xù)觀測的信號強(qiáng)度數(shù)據(jù)以及建立測距模型所需要的數(shù)據(jù)。 同時選擇了一條長15 m 的直線,對相同藍(lán)牙標(biāo)簽每隔0.3 m 采集一組信號強(qiáng)度,共50 組數(shù)據(jù)用于擬合信號衰減模型參數(shù)。 通過剔除偏差較大的觀測數(shù)據(jù)并進(jìn)行多次擬合,結(jié)果如圖2 所示,得到環(huán)境擬合參數(shù)A=-57.054,n=2.220。
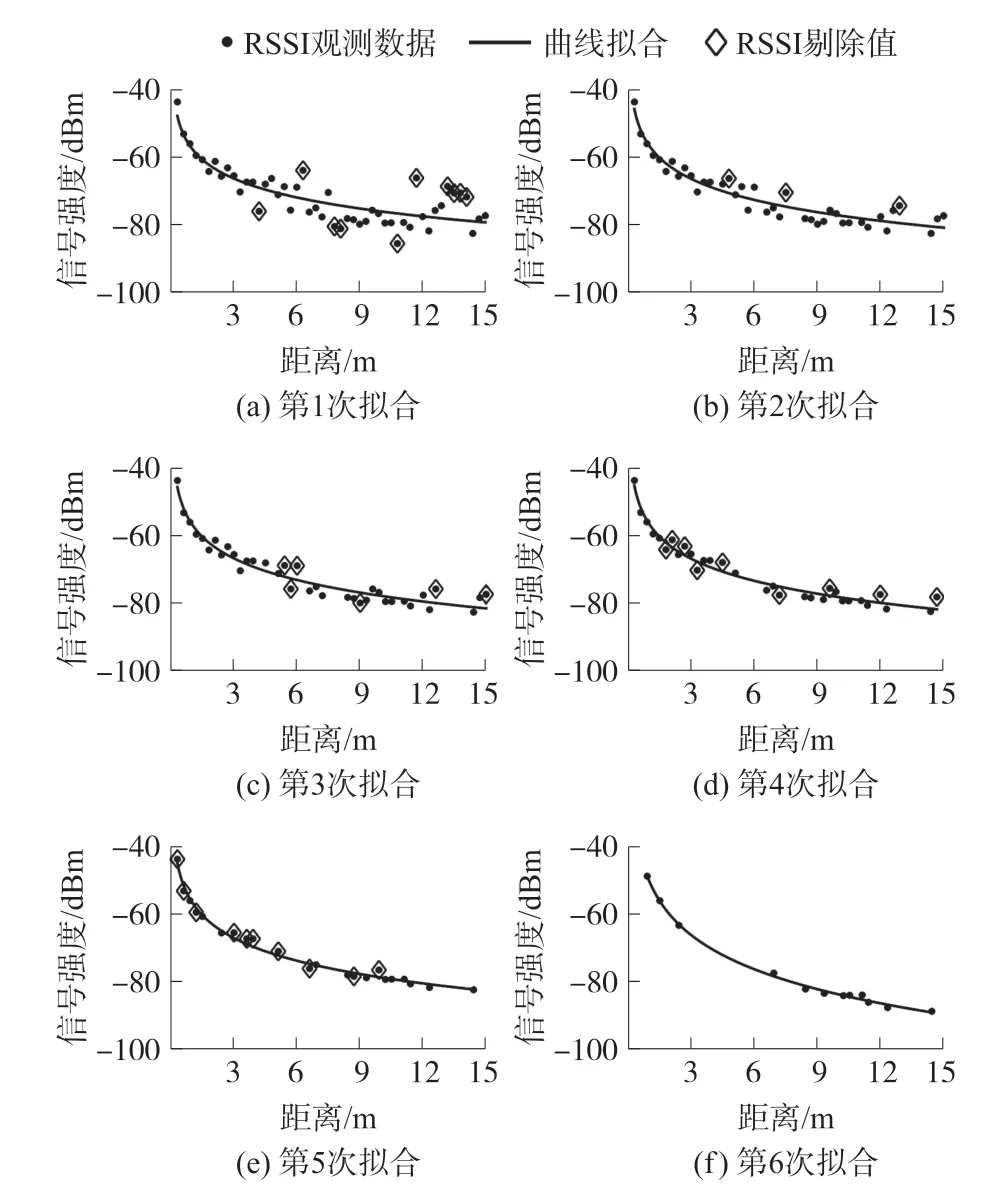
圖2 衰減模型曲線擬合
表1 是衡量圖2 中擬合精確度的指標(biāo),其中和方差(SSE)和中誤差(RMSE)值越小則擬合程度越高,確定系數(shù)(R-square)和校正確定系數(shù)(Adjust R-square)值越接近1 則曲線擬合越好。 通過狄克遜檢驗法不斷剔除誤差較大的RSSI 觀測數(shù)據(jù),經(jīng)過6次擬合,首次得到觀測數(shù)據(jù)和擬合曲線間的平均誤差為0.355 dBm,所以將第6 次擬合參數(shù)作為符合環(huán)境的衰減模型參數(shù)輸出。
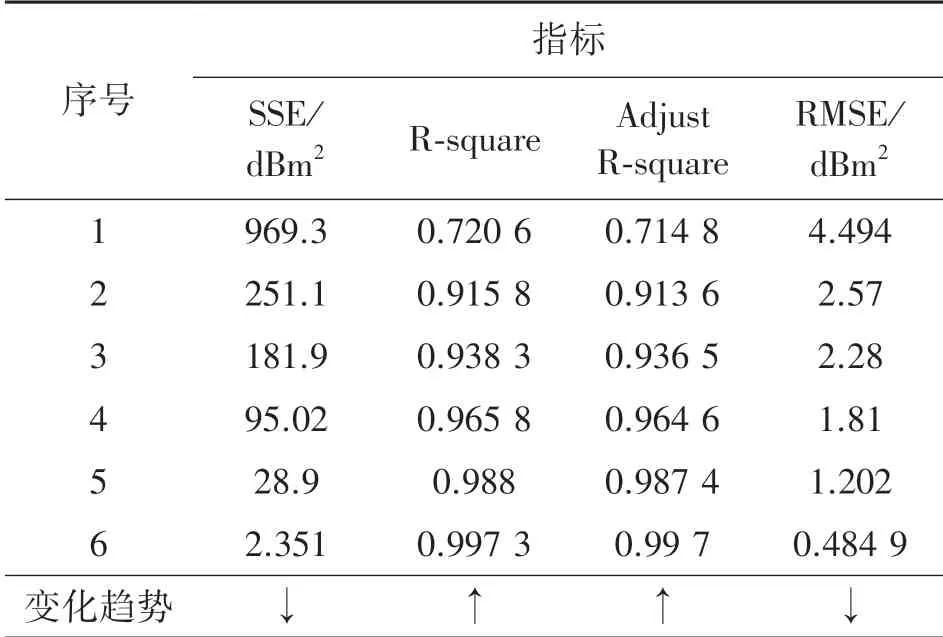
表1 擬合參數(shù)精度指標(biāo)
在實驗中對實測樣本數(shù)據(jù)分別實現(xiàn)了RSSI 測距定位、最小二乘法定位以及DF-RSSI-GN 算法定位。 前兩種定位算法中信號衰減參數(shù)均采用經(jīng)驗估值,DF-RSSI-GN 算法中的信號衰減參數(shù)采用本文擬合的結(jié)果。 表2 為三種算法的定位結(jié)果和已知坐標(biāo)的差值。
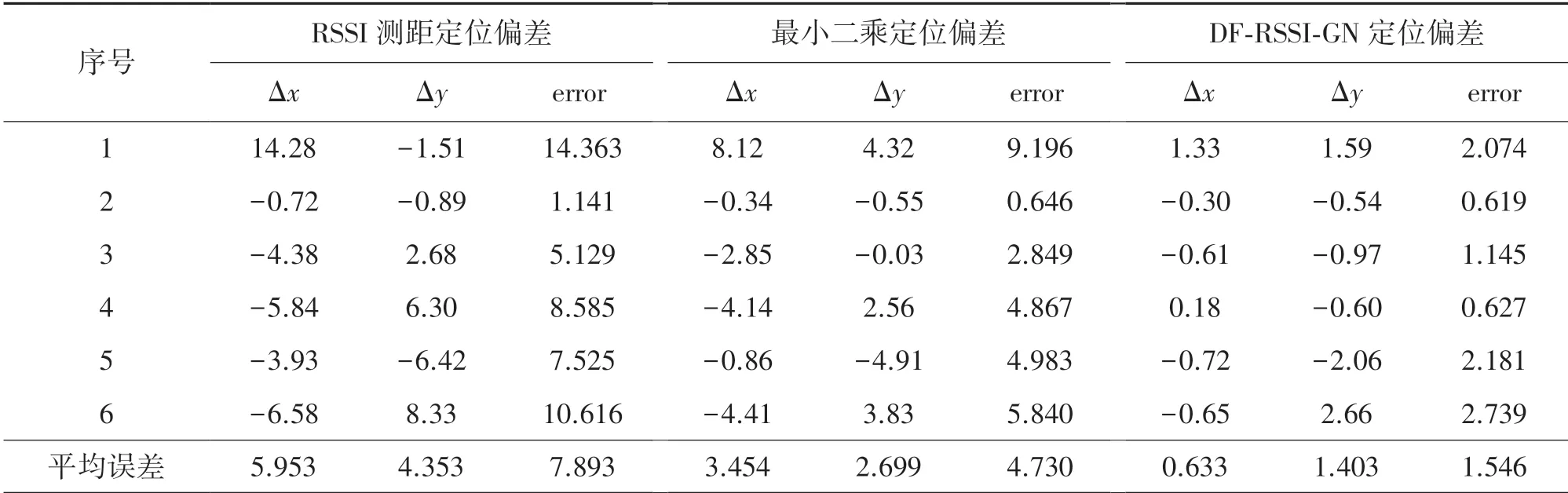
表2 三種定位算法對比 單位:m
通過對連續(xù)觀測的藍(lán)牙信號強(qiáng)度值進(jìn)行狄克遜檢驗法濾波處理,可以有效的剔除異常值。 在得到穩(wěn)定的信號強(qiáng)度值的基礎(chǔ)上,進(jìn)行Gauss-Newton 定位。 實驗結(jié)果如表2 所示,從表中可以看出:DF-RSSI-GN 定位算法平均點位誤差為1.6 m,定位精度明顯優(yōu)于RSSI 方法的7.9 m 和最小二乘定位算法的4.8 m;利用文獻(xiàn)[14]中混合濾波算法優(yōu)化RSSI 和文獻(xiàn)[18]中牛頓迭代定位算法對本文數(shù)據(jù)進(jìn)行處理得到平均點位誤差為3.2 m,對比顯示本文DF-RSSI-GN 算法的定位精度也具有明顯優(yōu)勢。
實驗對目標(biāo)點實現(xiàn)了RSSI 測距定位、最小二乘法定位以及利用DF-RSSI-GN 算法進(jìn)行定位,估計點位結(jié)果和真實點位對比如圖3 所示,通過DFRSSI-GN 算法估計的點位誤差明顯小于現(xiàn)有的定位算法。
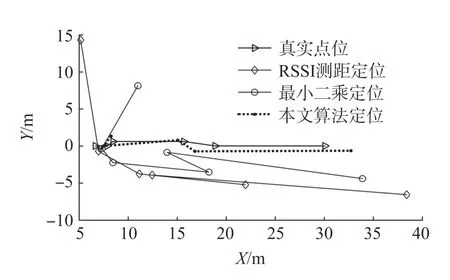
圖3 三種定位算法和真實點位
圖4 為三種定位算法以及狄克遜檢驗前Gauss-Newton 算法的定位誤差示意圖。 從圖中可以看出DF-RSSI-GN 算法定位誤差基本穩(wěn)定在0 ~3 m 范圍內(nèi),精度明顯高于RSSI 測距定位和最小二乘定位。為了驗證狄克遜檢驗法剔除異常值對定位結(jié)果的影響,實驗還對比了狄克遜檢驗前后的Gauss-Newton定位算法。 其中狄克遜檢驗法濾波后的Gauss-Newton 定位算法指本文的DF-RSSI-GN 算法,狄克遜檢驗法濾波前的Gauss-Newton 定位算法并未進(jìn)行狄克遜檢驗法濾波剔除RSSI 異常值,對RSSI 樣本數(shù)據(jù)直接采用高斯濾波,通過非線性回歸擬合信號衰減模型參數(shù),最后通過Gauss-Newton 迭代定位。 對比結(jié)果如圖4 顯示目標(biāo)點4 和目標(biāo)點5 的精度明顯高于狄克遜檢驗法處理前的精度,通過狄克遜檢驗法剔除RSSI 異常值對提高點位精度有一定效果。
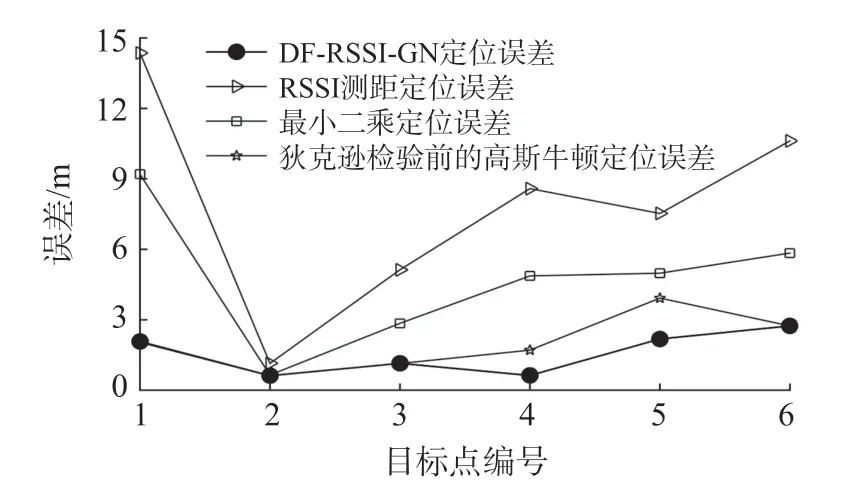
圖4 點位誤差
5 結(jié)語
本文針對無線傳感網(wǎng)絡(luò)節(jié)點定位中的無線信號異常值以及測距模型參數(shù)誤差進(jìn)行了研究,根據(jù)RSSI 偏態(tài)特性對其進(jìn)行了狄克遜檢驗法濾波和高斯均值濾波處理,采用非線性回歸模型估計衰減模型參數(shù),最后采用Gauss-Newton 迭代得到最優(yōu)位置。 實驗結(jié)果表明本文DF-RSSI-GN 算法中利用狄克遜檢驗濾波剔除RSSI 異常值可以避免小概率大干擾的離群值對濾波結(jié)果造成影響,同時還可以提高RSSI 測距精度;通過濾波后的RSSI 值代替物理距離確定權(quán)因子可以減少測距模型參數(shù)誤差造成的權(quán)誤差;利用高斯牛頓定位迭代算法可以不斷修正點位偏差;相較于現(xiàn)有的改進(jìn)定位算法,本文算法的定位精度有明顯提升。 但是本文只考慮了靜止目標(biāo)點定位,動態(tài)定位有待下一步研究。
