掘進(jìn)機(jī)簡(jiǎn)易自適應(yīng)截割控制系統(tǒng)的研究
2021-04-08 09:34:50毛凱凱
機(jī)械管理開(kāi)發(fā) 2021年2期
毛凱凱
(晉能控股煤業(yè)集團(tuán)晉城事業(yè)部五人組, 山西 晉城 048000)
引言
掘進(jìn)機(jī)在截割作業(yè)中一般采用人工截割控制模式,截割效率和巷道成型質(zhì)量嚴(yán)重依賴(lài)于作業(yè)人員的經(jīng)驗(yàn)和熟練程度,受井下惡劣環(huán)境和人員疲勞度的影響,極易產(chǎn)生截割不到位的情況[1],從而影響井下煤炭開(kāi)采效率。目前一些新型的掘進(jìn)設(shè)備開(kāi)始采用記憶截割控制,初步實(shí)現(xiàn)了井下巷道的無(wú)人化掘進(jìn),但該模式的控制邏輯復(fù)雜,難以應(yīng)用在老式掘進(jìn)機(jī)上,因此本文提出了一種新的基于PID 控制的簡(jiǎn)易截割控制系統(tǒng),通過(guò)預(yù)先對(duì)煤層分布情況的探測(cè),將地質(zhì)條件數(shù)據(jù)輸入到控制系統(tǒng)中,然后根據(jù)掘進(jìn)作業(yè)需求,以掘進(jìn)方向上的位置坐標(biāo)為基礎(chǔ),設(shè)定在不同位置時(shí)的截割姿態(tài),進(jìn)而實(shí)現(xiàn)對(duì)掘進(jìn)機(jī)截割作業(yè)過(guò)程中的自動(dòng)控制[1]。
1 簡(jiǎn)易截割控制系統(tǒng)的介紹
在控制系統(tǒng)中輸入截割控制邏輯后,對(duì)掘進(jìn)機(jī)自動(dòng)截割的控制主要是通過(guò)調(diào)節(jié)搖臂升降和機(jī)身回轉(zhuǎn)來(lái)實(shí)現(xiàn)的。掘進(jìn)機(jī)自動(dòng)截割作業(yè)時(shí),根據(jù)調(diào)節(jié)信號(hào)控制各執(zhí)行油缸的動(dòng)作,對(duì)執(zhí)行油缸的控制主要是通過(guò)比例放大器調(diào)節(jié)各個(gè)控制閥開(kāi)口的大小來(lái)實(shí)現(xiàn)的,對(duì)搖臂升降和搖臂回轉(zhuǎn)機(jī)構(gòu)的控制是為了讓截割機(jī)構(gòu)按照設(shè)定的截割路徑進(jìn)行截割作業(yè),此時(shí)設(shè)置在掘進(jìn)機(jī)上的各類(lèi)傳感器對(duì)掘進(jìn)機(jī)的工作狀態(tài)進(jìn)行監(jiān)控,將監(jiān)測(cè)信息和系統(tǒng)中理論數(shù)據(jù)進(jìn)行對(duì)比,從而判斷截割作業(yè)的偏差情況,然后根據(jù)偏差量進(jìn)行調(diào)整,保證自動(dòng)截割作業(yè)的精確性。該控制方案的優(yōu)點(diǎn)在于截割機(jī)構(gòu)能夠從任意位置開(kāi)始進(jìn)行截割作業(yè),無(wú)需進(jìn)行專(zhuān)門(mén)的找正,從而保證了井下截割作業(yè)的靈活性,該掘進(jìn)機(jī)簡(jiǎn)易自動(dòng)截割控制原理如圖1所示[2]。

圖1 簡(jiǎn)易截割控制邏輯示意圖
2 簡(jiǎn)易截割控制系統(tǒng)的硬件分析
由于掘進(jìn)機(jī)作業(yè)環(huán)境復(fù)雜,且長(zhǎng)期在劇烈沖擊作用下工作,因此對(duì)截割控制系統(tǒng)的硬件結(jié)構(gòu)可靠性要求很高。經(jīng)過(guò)多次試驗(yàn)驗(yàn)證,最終確認(rèn)了該截割控制系統(tǒng)的硬件構(gòu)成如圖2 所示[3]。
由圖2 可知,該截割控制系統(tǒng)硬件結(jié)構(gòu)主要包括了主、從PID 控制器,監(jiān)測(cè)傳感器、電磁控制閥以及CAN 數(shù)據(jù)通信系統(tǒng),從PID 控制器主要用于對(duì)掘進(jìn)機(jī)液壓控制系統(tǒng)中的各類(lèi)電磁閥的動(dòng)作進(jìn)行控制,根據(jù)截割作業(yè)時(shí)的不同需求控制各電磁閥的開(kāi)度和動(dòng)作方向,滿(mǎn)足截割作業(yè)時(shí)不同截割速度、截割方向快速變化的需求。主PID 控制器主要是接收各監(jiān)測(cè)傳感器的監(jiān)測(cè)數(shù)據(jù)信息,對(duì)掘進(jìn)機(jī)的位置和姿態(tài)進(jìn)行判斷,確定下一階段掘進(jìn)機(jī)的動(dòng)作路徑。在該控制系統(tǒng)中各類(lèi)數(shù)據(jù)信息的傳遞均通過(guò)CAN 數(shù)據(jù)總線(xiàn)進(jìn)行,滿(mǎn)足在井下惡劣環(huán)境中數(shù)據(jù)通信安全性的需求。

圖2 截割控制系統(tǒng)硬件結(jié)構(gòu)示意圖
該數(shù)據(jù)控制系統(tǒng)硬件結(jié)構(gòu)布置合理,結(jié)構(gòu)緊湊,所有接口均采用了標(biāo)準(zhǔn)通信協(xié)議,能夠快速地實(shí)現(xiàn)數(shù)據(jù)信息的轉(zhuǎn)換,同時(shí)具有很強(qiáng)的擴(kuò)展性,便于后續(xù)的升級(jí)。在工作時(shí)系統(tǒng)首先通過(guò)各類(lèi)傳感器設(shè)備對(duì)掘進(jìn)機(jī)各油缸的行程、俯仰角進(jìn)行監(jiān)控,然后將數(shù)據(jù)信息傳遞到主PID 控制器中,完成數(shù)據(jù)信息的分析,確定掘進(jìn)機(jī)的截割姿態(tài),然后將數(shù)據(jù)信息和系統(tǒng)內(nèi)當(dāng)前的理論截割姿態(tài)進(jìn)行對(duì)比,獲取各個(gè)數(shù)據(jù)信息之間的差值,然后獲取各個(gè)數(shù)據(jù)的調(diào)整量,通過(guò)CAN 數(shù)據(jù)總線(xiàn)將信息傳遞到從PID 控制器中,經(jīng)過(guò)數(shù)據(jù)的轉(zhuǎn)換后發(fā)出調(diào)節(jié)信號(hào),控制各電磁閥動(dòng)作,滿(mǎn)足調(diào)整需求,從而實(shí)現(xiàn)對(duì)掘進(jìn)機(jī)截割作業(yè)的自動(dòng)控制。
3 簡(jiǎn)易截割控制系統(tǒng)PID 控制原理
PID 控制是一種邏輯性很強(qiáng)的線(xiàn)性控制器,在工作時(shí)系統(tǒng)將測(cè)定的掘進(jìn)機(jī)狀態(tài)偏差量輸入到PID控制器中,系統(tǒng)利用設(shè)定好的控制邏輯對(duì)數(shù)據(jù)進(jìn)行分析、修正,然后輸出控制信號(hào),控制各執(zhí)行機(jī)構(gòu)的動(dòng)作,為了確保調(diào)節(jié)的精確性,系統(tǒng)采用了閉環(huán)控制的原理,在調(diào)整過(guò)程中不斷地對(duì)數(shù)據(jù)進(jìn)行修正,從而確保自動(dòng)截割作業(yè)過(guò)程中的控制精確性,PID 控制邏輯如圖3 所示[4],其中:e(t)表示偏差量;u(t)表示修正后的調(diào)節(jié)控制量;y(t)表示輸出的控制信號(hào)。
4 簡(jiǎn)易截割控制系統(tǒng)的應(yīng)用情況
為了對(duì)簡(jiǎn)易自動(dòng)截割控制系統(tǒng)的應(yīng)用效果進(jìn)行分析,本文在現(xiàn)有掘進(jìn)機(jī)基礎(chǔ)上對(duì)其截割控制系統(tǒng)進(jìn)行優(yōu)化,然后利用其進(jìn)行自動(dòng)截割作業(yè),對(duì)截割作業(yè)過(guò)程中的截割路徑進(jìn)行跟蹤測(cè)量結(jié)果如圖4所示。
由跟蹤測(cè)量結(jié)果可知,掘進(jìn)機(jī)簡(jiǎn)易自動(dòng)截割控制系統(tǒng)的控制精度高、截割一致性好,截割偏差約±1°,有效地提升了截割時(shí)的巷道成型質(zhì)量,根據(jù)統(tǒng)計(jì)該簡(jiǎn)易截割控制系統(tǒng)能夠?qū)⒕陆馗钚侍嵘?9.6%,巷道一次截割成型率提升47.8%,對(duì)提升井下綜采作業(yè)效率和安全性具有十分重要的意義。
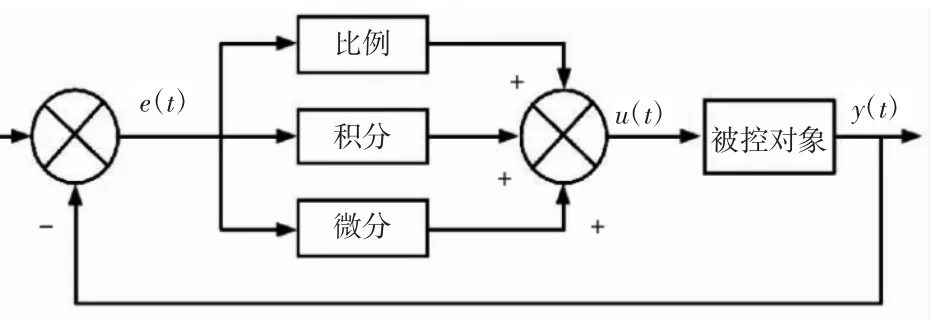
圖3 PID 控制邏輯示意圖
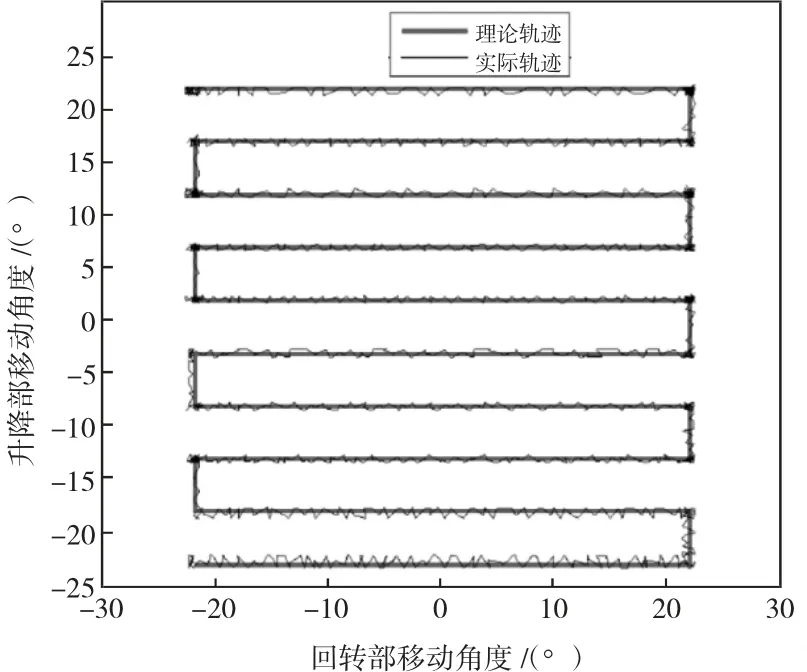
圖4 自動(dòng)截割控制路徑示意圖
5 結(jié)論
針對(duì)目前掘進(jìn)機(jī)截割控制系統(tǒng)控制穩(wěn)定性差、巷道截割質(zhì)量低,嚴(yán)重影響巷道掘進(jìn)效率的問(wèn)題,本文提出了一種簡(jiǎn)易的自適應(yīng)截割控制系統(tǒng),根據(jù)分析表明:
1)簡(jiǎn)易截割控制系統(tǒng)的優(yōu)點(diǎn)在于,截割機(jī)構(gòu)能夠從任意位置開(kāi)始進(jìn)行截割作業(yè),無(wú)需進(jìn)行專(zhuān)門(mén)的找正,從而保證了井下截割作業(yè)的靈活性;
2)該數(shù)據(jù)控制系統(tǒng)硬件結(jié)構(gòu)布置合理,結(jié)構(gòu)緊湊,所有接口均采用了標(biāo)準(zhǔn)通信協(xié)議,能夠快速地實(shí)現(xiàn)數(shù)據(jù)信息的轉(zhuǎn)換,同時(shí)具有很強(qiáng)的擴(kuò)展性,便于后續(xù)的升級(jí);
3)該簡(jiǎn)易截割控制系統(tǒng)能夠?qū)⒕陆馗钚侍嵘?9.6%,巷道一次截割成型率提升47.8%,對(duì)提升井下綜采作業(yè)效率和安全性具有十分重要的意義。
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中華手工(2017年2期)2017-06-06 23:00:31
故事大王(2016年7期)2016-09-22 17:30:08
時(shí)代英語(yǔ)·高二(2015年1期)2015-03-16 00:08:11
中外會(huì)展(2014年4期)2014-11-27 07:46:46
中國(guó)衛(wèi)生(2014年11期)2014-11-12 13:11:32
兒童故事畫(huà)報(bào)(2013年3期)2013-06-24 05:40:30
體育師友(2011年2期)2011-03-20 15:29:29
小哥白尼·軍事科學(xué)畫(huà)報(bào)(2009年9期)2009-09-14 03:18:56
