某電動車后輪轉向系統控制策略開發研究
2021-04-05 09:25:00湯敏郝文權禹真
汽車文摘 2021年4期
湯敏 郝文權 禹真
(1.中國第一汽車股份有限公司 研發總院,長春130013;2.汽車振動噪聲與安全控制綜合技術國家重點實驗室,長春130013)
主題詞:后輪轉向 控制策略 雙參前饋控制 電動汽車
0 前言
近年來,隨著汽車技術的發展,很多汽車廠商推出了四輪轉向車輛。四輪轉向系統的主要作用是低速轉向時減小車輛的轉彎半徑,提升低速轉向機動性和輕便性,高速轉向時使車輛基本保持質心側偏角為零,大大提升車輛對方向盤轉角輸入的動態響應特性和操穩性能[1]。
1983 年Sato 教授等人提出了橫擺角速度反饋控制策略,可以較好地改善車輛轉向特性,并具有良好的抗干擾性[2]。
1986 年Sano 教授等人提出了基于車速的前后輪轉角比為定值的后輪轉向前饋控制策略,可減小車輛低速行駛的轉彎半徑,減小高速行駛的質心側偏角,提高操縱穩定性[3]。
Furukawa 教授等人提出了前后輪轉角比是方向盤轉角函數的后輪轉向控制策略,試驗結果表明,該策略能夠解決輪胎非線性導致的橫擺角速度增益惡化的問題[4]。
Fukanaga 等人設計了具有一階滯后的后輪轉向控制策略,該策略可以在改善車輛穩定性的同時,不延長橫擺角速度和側向加速度的響應時間[5]。
此外,基于現代控制理論的最優控制、模糊控制、魯棒控制等控制方法也在后輪轉向開發中有很多研究成果。
本文提出雙參前饋后輪轉向控制策略,并以某電動車為載體進行研究,創建四輪轉向線性二自由度車輛模型,以及基于CarSim 與MATLAB/Simulink的聯合仿真模型,將所提出的雙參前饋后輪轉向控制策略與前饋比例控制策略、前饋比例加橫擺角速度反饋控制策略進行對比分析,證明了控制模型的正確性與優越性。
1 主動后輪轉向控制機理
低速轉向時,四輪轉向車輛的后輪產生與前輪轉動方向相反的轉角,由圖1所示的車輛Ackerman轉向特性,可見四輪轉向相比于前輪轉向可以明顯減小車輛的轉彎半徑,提高低速轉向的機動性和輕便性,在城市交通中駕駛更容易。四輪轉向技術使大型車輛具有如同小型車的操縱和泊車便捷性[6-7]。
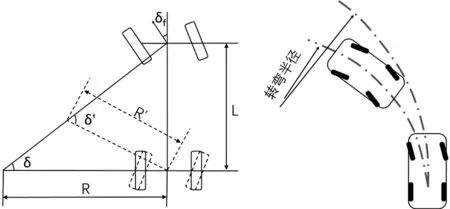
圖1 車輛Ackerman轉向原理[8-9]
高速轉向時,傳統前輪轉向車輛的前進方向與其縱向中心線存在夾角,即質心側偏角,四輪轉向的目標是使車輛質心側偏角為零,有效消除或降低車輛側滑事故的發生幾率,明顯改善車輛高速轉向的動態響應和穩定性,減輕駕駛員高速駕車的疲勞感。圖2對比了前輪轉向車輛和四輪轉向車輛的高速穩定性差異,四輪轉向車輛具有更好的轉向穩定性[10-12]。

圖2 四輪轉向提升高速穩定性[9]
2 車輛動力學模型
2.1 2自由度(2DOF)簡化車輛模型
當車輛側向加速度在0.4 g以內時,輪胎側偏特性處于線性范圍內,可將車輛簡化成一個線性2自由度的2輪摩托車模型[13]。模型由2個有側向彈性的輪胎支撐地面,具有側向和橫擺兩個運動自由度[14],如圖3所示。

圖3 四輪轉向車輛的2DOF車輛模型
圖中,β為質心側偏角,ωr為橫擺角速度,u為質心前進速度,υ為質心側向速度,a、b分別為前、后軸到質心的距離,L為軸距,δf、δr分別為前、后輪的轉角,αf、αr分別為前、后輪的輪胎側偏角。
根據車輛的力、力矩平衡關系,可求得二自由度車輛運動微分方程[15]:
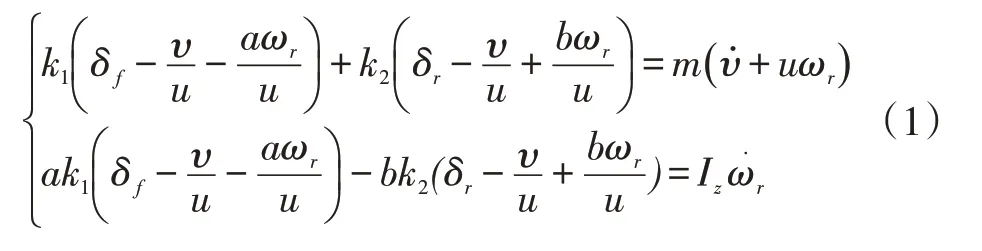
式中,m為整車質量,k1、k2分別為前、后軸的側偏剛度,Iz為橫擺轉動慣量,質心側偏角
式(1)轉化成狀態空間表達式為:
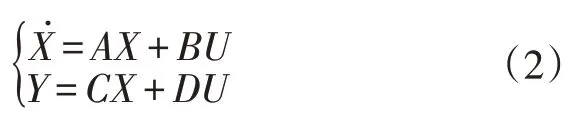
式中,
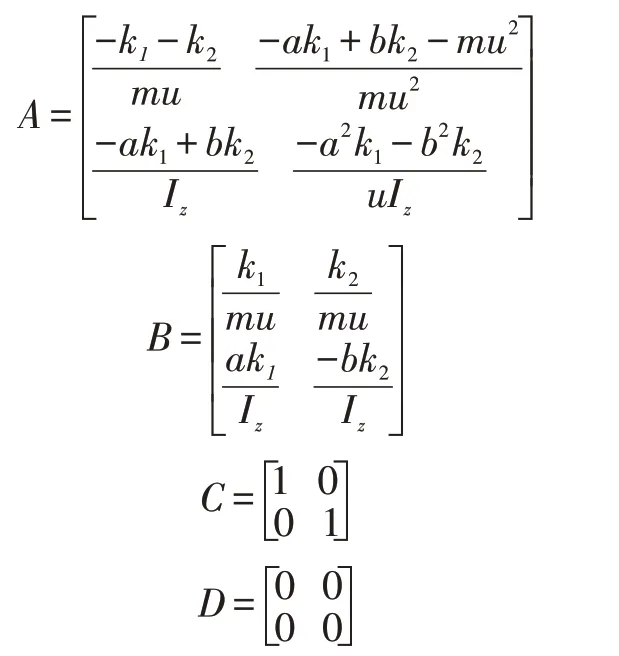
取狀態向量X=(β ωr)T,輸入向量U=(δf δr)T,輸出向量Y=(β ωr)T。
2.2 CarSim復雜車輛模型
以后輪轉向系統為研究對象,建立某電動車樣車整車CarSim 模型,在轉向系統模塊中激活后轉向系統,并給定后齒條與左右后輪轉向角的關系,如圖4所示。
在后輪轉向控制算法模型部分中,將前左輪轉角Steer_L1、前右輪轉角Steer_R1、橫擺角速度AVz、車速Vx 選定為CarSim 整車模型的輸出通道,即控制策略模型的輸入;將后左輪轉角IMP_STEER_L2、后右輪轉角IMP_STEER_R2 選定為CarSim 整車模型的輸入通道,即控制策略模型的輸出。通過Send to Simulink將CarSim 整車模型與MATLAB/Simulink 搭建的控制策略模型形成閉環控制系統進行仿真分析。
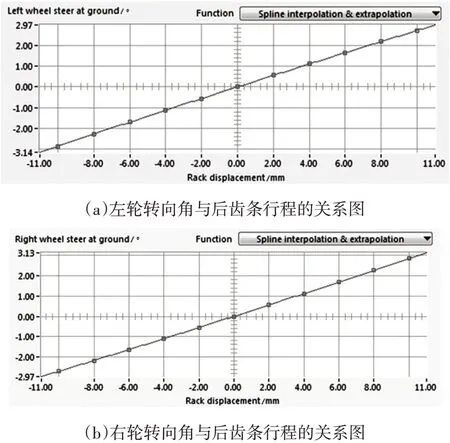
圖4 左右后輪轉向角與后齒條行程的關系
3 后輪轉向系統控制策略
3.1 前饋比例控制
車輛轉向行駛時,質心側偏角越小則輪胎側滑的趨勢越小,操縱穩定性越好[16]。為提高車輛的循跡能力和穩定性,四輪轉向的控制目標是使車輛穩態轉向質心側偏角為零[17]。Sano教授等用線性二自由度模型推導出車輛穩態轉向質心側偏角為零時前、后輪轉角的關系有如下關系式[3]:
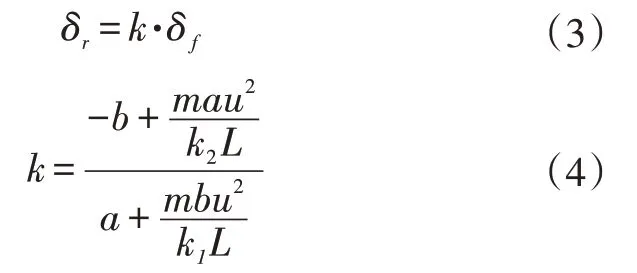
該前饋比例控制策略的比例系數k與車速的關系如圖5 所示:低速時k值為負,即前后輪反向轉動,減小轉彎半徑,提高轉向靈活性;高速時k值為正,即前后輪同向轉動,提高車輛的穩定性[18]。
3.2 前饋比例加橫擺角速度反饋控制
為提高車輛的抗干擾穩定性,在前饋比例控制策略的基礎上加上橫擺角速度反饋[19-20]。為使橫擺角速度ωr跟蹤理想值ωrd,在控制策略中引入橫擺角速度偏差,即理想橫擺角速度與實際橫擺角速度的差值e[21]。
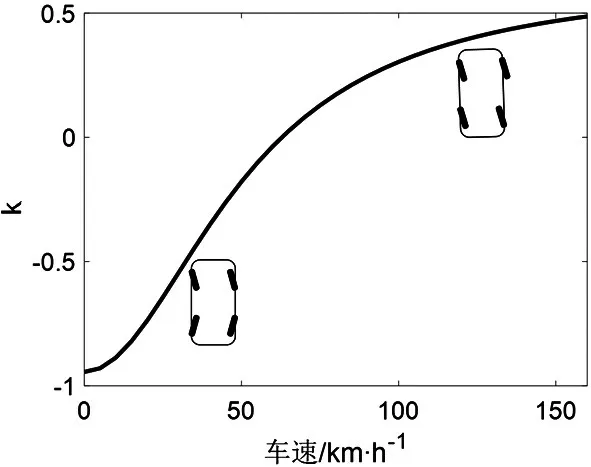
圖5 前饋比例控制比例系數k與車速的關系

在車輛轉向時,此算法可以保持駕駛員具有同前輪轉向相同的轉向感覺,并實現質心側偏角為零。這樣可以降低駕駛員的疲勞感,且提升操縱穩定性[22]。
3.3 雙參前饋后輪轉向控制
為使高速轉向時車輛的質心側偏角快速、較小超調的控制到零,并且不降低整體的車輛響應,需要后輪相對前輪先反向轉動,再同向轉動,這樣可以補償后輪與前輪同向轉動所導致的橫擺響應下降。提出以質心側偏角和橫擺角速度2個參數為控制目標的雙參前饋控制策略。
令質心側偏角及質心側偏角速度為零,可推導出后輪轉角與前輪轉角的關系式如下:

圖6 雙參前饋控制算法的車輪轉角
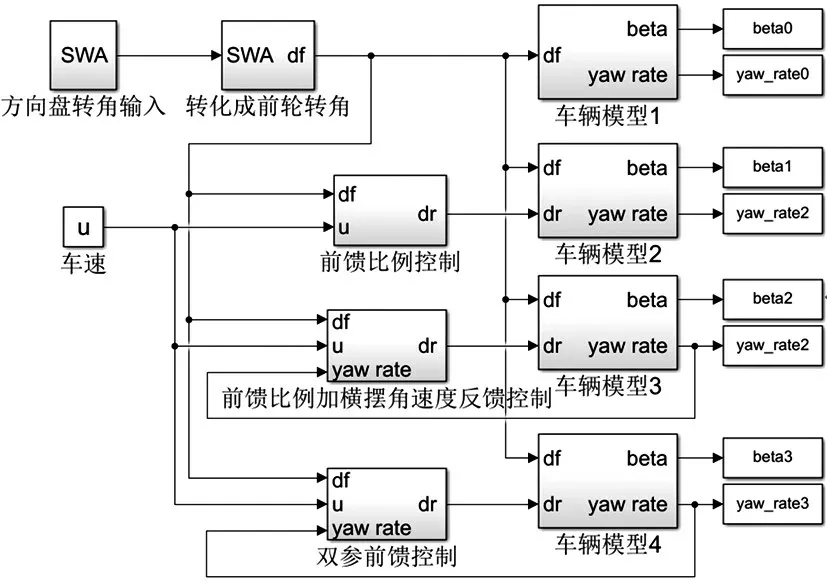
圖7 3種控制策略模型
4 不同控制算法對比
4.1 2DOF車輛模型不同控制策略對比
在MATLAB/Simulink 中搭建3 種控制策略的對比分析模型和2DOF車輛模型如圖7所示。其中車輛模型1 為僅前輪轉向車輛,車輛模型2 為前饋比例控制的車輛,車輛模型3為前饋比例加橫擺角速度反饋控制的車輛,車輛模型4為雙參前饋后輪轉向控制的車輛。
4.1.1 低速轉向控制效果對比
車輛以20 km/h 的車速前進,方向盤在0.1 s 內從0°到90°階躍轉向,僅前輪轉向和后輪轉向3種控制策略下車輛的車輪轉角、質心側偏角和橫擺角速度響應對比如圖8~10所示。
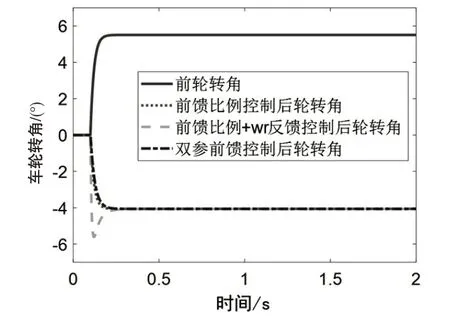
圖8 簡化車輛模型低速時后輪轉角對比
分析結果可知,低速轉向時3 種控制算法均使車輛質心側偏角控制到零;且橫擺角速度均比前輪轉向時大,轉向更加靈活,轉彎半徑更小。
4.1.2 高速轉向控制效果對比
選取典型工況對比分析不同后輪轉向控制策略的高速轉向控制效果。車輛以100 km/h的車速前進,方向盤在0.1 s 內從0°到20°階躍轉向,僅前輪轉向和后輪轉向3種控制策略下車輛的車輪轉角、質心側偏角和橫擺角速度響應對比如圖11~13所示。
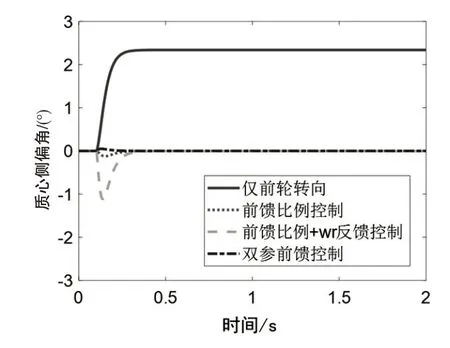
圖9 簡化車輛模型低速時質心側偏角對比
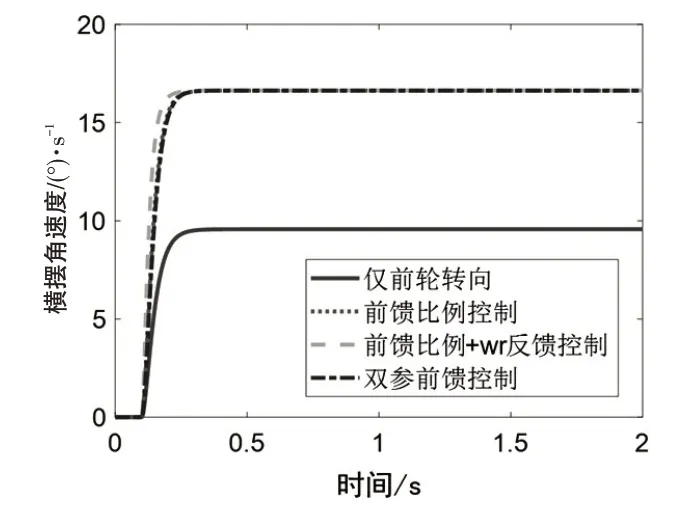
圖10 簡化車輛模型低速時橫擺角速度對比
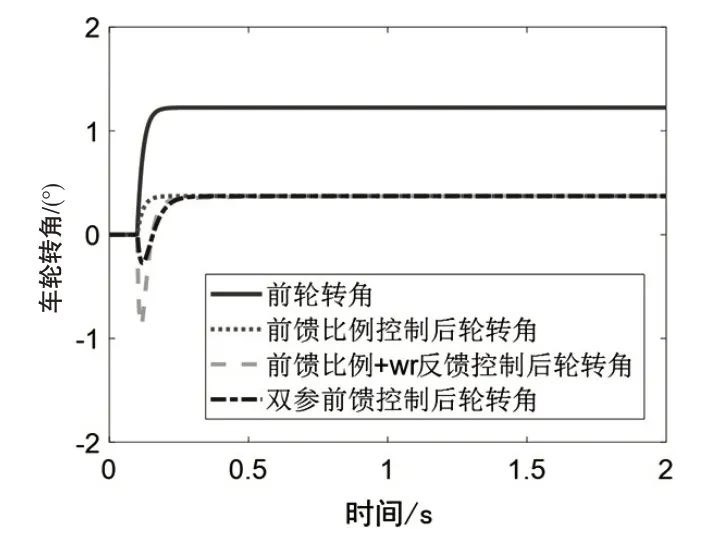
圖11 簡化車輛模型高速時后輪轉角對比
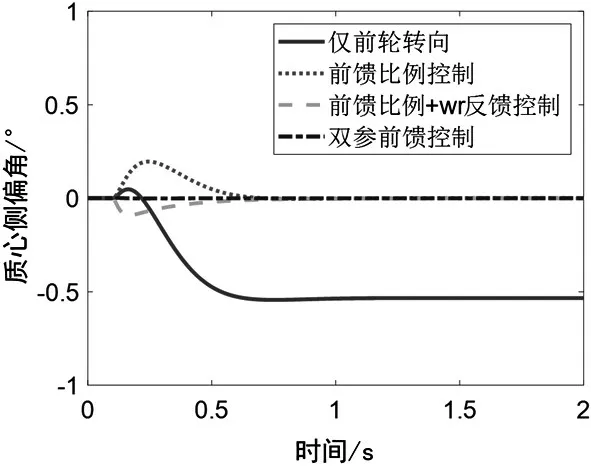
圖12 簡化車輛模型高速時質心側偏角對比
分析結果可見,高速階躍轉向時,僅前輪轉向的車輛穩態質心側偏角不為零,3 種后輪轉向控制策略車輛最終穩態質心側偏角均能控制到零,四輪轉向控制車輛的轉向循跡性能大大提升。3種控制策略的穩態橫擺角速度均小于前輪轉向車輛,降低轉向靈敏度、提升穩定性。
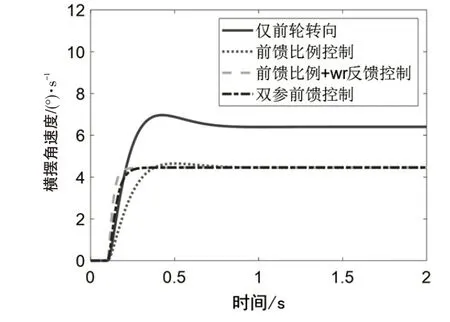
圖13 簡化車輛模型高速時橫擺角速度對比
3種算法對比可見,前饋比例控制車輛后輪轉角與前輪轉角方向相同,前饋比例加橫擺角速度反饋控制和雙參前饋控制2種算法的后輪相對前輪轉角均是先反向,再同向轉動,初始階段的后輪反向轉角可明顯提升車輛的動態響應,之后的同向轉角提升車輛的穩定性,這樣在提升車輛穩定性的同時可以保證整個過程響應特性。
3 種算法中,前饋比例控制會延長橫擺角速度達到穩定的時間、橫擺超調明顯,前饋比例加橫擺角速度反饋控制和雙參前饋控制均可實現較快的橫擺響應、較小的橫擺超調。其中雙參前饋控制可以迅速、幾乎無超調的實現質心側偏角為零的目標,在提升車輛動態響應的同時大大提升車輛的穩定性。
4.2 CarSim車輛模型不同控制策略對比
2DOF 線性車輛模型做了簡化,為模擬實際車輛控制效果,搭建CarSim 車輛模型和3 種控制策略的Simulink 算法模型并進行聯合仿真,如圖14 所示,可對3種控制算法和僅前輪轉向車輛的轉向特性進行對比分析。
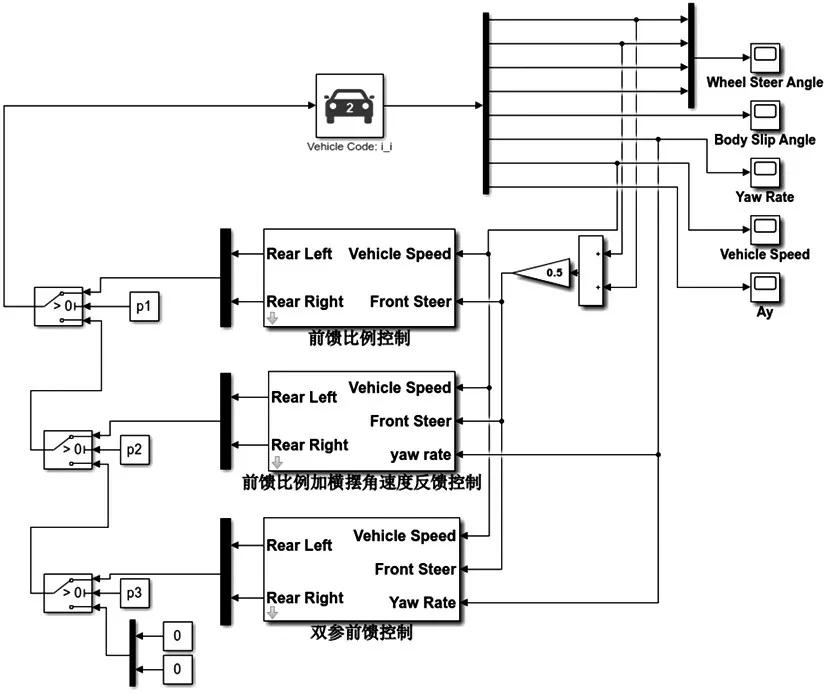
圖14 3種控制策略與CarSim整車模型聯合仿真
基于CarSim的聯合仿真與基于線性2DOF簡化模型的分析結果趨勢一致,說明了CarSim聯合仿真模型與線性2DOF簡化模型的一致性較好。與前輪轉向車輛相比,四輪轉向車輛在低速時提高了轉向機動性,如圖15~16所示,高速時增加穩定性、提高循跡能力,如圖17~18所示。
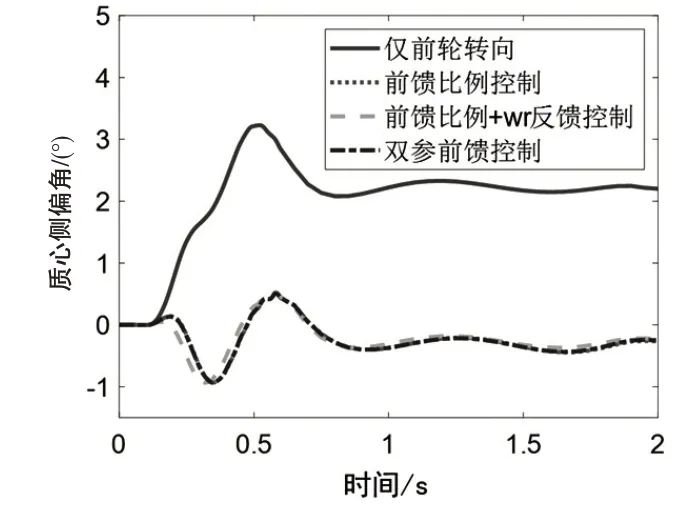
圖15 復雜車輛模型低速時質心側偏角對比

圖16 復雜車輛模型低速時橫擺角速度對比
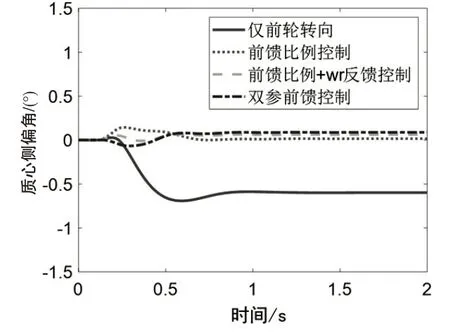
圖17 復雜車輛模型高速時質心側偏角對比
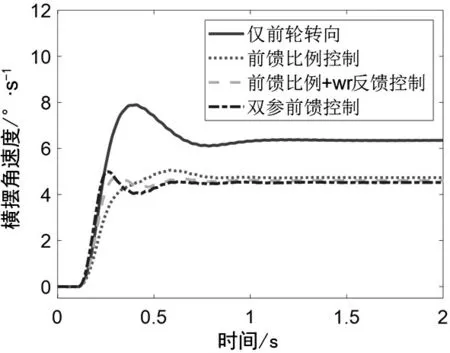
圖18 復雜車輛模型高速時橫擺角速度對比
5 結束語
本文基于某電動車平臺以零質心側偏角為目標開發了后輪轉向雙參前饋控制策略,通過簡化線性2DOF 模型和復雜車輛聯仿模型仿真分析,對比分析前饋比例控制、前饋比例加橫擺角速度反饋控制、雙參前饋后輪轉向控制3 種控制策略的優缺點。結果表明,雙參前饋后輪轉向控制策略在車輛低速轉向時可以明顯降低轉彎半徑,提升車輛機動性;高速轉向時可以迅速、較小超調的控制車輛質心側偏角零,提高高速轉向時的操縱穩定性能,證明了該算法的優越性。
本文通過仿真手段對不同后輪轉向控制算法進行了對比研究,但實際車輛與仿真模型存在一定的差異性,因此下一步需要對后輪轉向控制系統進行實車標定和調試,并在實車上進一步對控制算法進行對比分析。此外,隨著底盤各類動力學電控系統的逐漸成熟,尤其是智能汽車的迅速發展,后輪轉向控制系統與其它電控系統之間的協調控制問題也是未來的研究熱點。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
核科學與工程(2015年4期)2015-09-26 11:59:03