新能源汽車電池管理方法綜述*
2021-04-05 09:24:54胡治國司少康
汽車文摘 2021年4期
關鍵詞:方法
胡治國 司少康
(河南理工大學電氣工程與自動化學院,焦作454000)
主題詞:新能源汽車 BMS SOC估測 均衡管理方法
縮略語
BMS Battery Management System
SOC State of Charge
OCV Open Circuit Voltage
SVM Support Vector Machine
NEV New Energy Vehicle
0 前言
在環境和能源問題日益嚴峻的大環境下,在世界各國政府大力扶持下,電動汽車作為滿足節能減排的要求的方案得到了快速發展,成為汽車工業未來發展的必然趨勢。電池管理系統(Battery Management System,BMS)是電動汽車最重要的部分之一[1-2],它的主要作用包括以下4點:
(1)對參數在線觀測;
(2)荷電狀態(State of Charge,SOC)估測;
(3)電池均衡管理和熱管理;
(4)CAN總線通信[3]。
其中,準確估測SOC和電池均衡管理是BMS的核心功能,也是優化系統能量管理,提高動力電池的使用效率,延長電池使用壽命的關鍵。如果對SOC估測不準確,會導致SOC大的波動,從而減少動力電池的循環壽命。如果不對電池進行均衡管理,則會損害電池的使用壽命和工作效率。本文旨在對電池管理系統中SOC估測和電池均衡管理的方法進綜述與分析,為未來工作提供理論性的可靠參考。
1 SOC估測方法
SOC是不能直接測量出來的,需要電池的等效電路來對其進行在線估測。為了得到精確的SOC值,先把電池額定容量C設置在溫室狀態下,以C/30倍率充電到滿充時刻的最大安時數[4]。Ct(t)代表剩余容量,C/30倍率到t時刻的安時數,如式(1)。

當t=0 時,SOC初始值為100%,I(t)為t時間的電流,放電狀態時刻,I>0。
電池需要建立電路模型才便于計算分析,以下為3種典型的等效電路模型:
(1)Rint模型;
(2)Thevenin模型;
(3)PNGV模型。
SOC估測是評判電池管理系統性能的最重要參數之一[5],電荷狀態的在線估算有很多比較熟悉的方法,每個方法都有優缺點和特定的應用范圍,以下簡述主要SOC估測方法。
1.1 安時積分法
該方法是SOC估測法中比較簡單的一種方法,明確開始時刻的SOC值,即可通過安時積分法的數學表達式算出當前時間的SOC值,如式(2)。

式中,SOCT為t時刻的剩余電量;SOC?為初始值;t為電流瞬時值;C為電池額定容量。
該方法使用方便,比較常用,但它也有以下缺點。第一,使用該方法必須明確SOC的初值SOC?,該值可以在電池充滿電后并放置一段時間即可測得。第二,電流的噪聲會使SOC估測的準確值發生偏離造成運算誤差影響。因此,它不能單獨使用必須與其他算法一起使用才能保證其準確性。
1.2 卡爾曼濾波算法
改良的卡爾曼濾波算法有其良好的適應性和極高的準確性,應用越來越廣泛。它可以對極其復雜的動態系統給出最優估算。想利用卡爾曼濾波法對電池SOC進行最優化估算,必須要運用到卡爾曼濾波的遞推估測方程來觀察方程釋放出來的狀態信息,并把上一時刻的估算值與當前時刻觀測的數值進行在線更新,除去系統帶來的誤差與干擾,達到理想效果,如式(3)、式(4)。

其中,XK是系統狀態變量,UK是系統的輸入變量,yk系統狀態輸出量,f(xk,uk)與g(xk,uk)是電池模型確定的非線性方程,在估算時進行線性化。
卡爾曼濾波算法的優點是適合于電流波動比較劇烈的混合動力汽車電池SOC的估測,它可以給出SOC的估測誤差值。但是,它的缺點是如果SOC的估算值越高,電池模型就越復雜,計算量就比一般的計算量大很多,而且它受溫度,自放電率和放倍率的影響大。
1.3 模糊邏輯推理與神經網絡法
人工智能方向中最重要的分支,一種是神經網絡另一種是模糊邏輯推理。所謂模糊邏輯推理就是以人的思想、思維方式進行定點分析與推導,具有很強的自處理能力;神經網絡算法主要結構可概括為3層:
(1)輸入層
(2)隱含層
(3)輸出層
它具有非線性、自學習特點,可以整合來自不同的電池數據,并確定各個參數之間的關系。利用模糊邏輯推理與神經網絡的并行結構和學習能力估測SOC[6],如圖1所示。
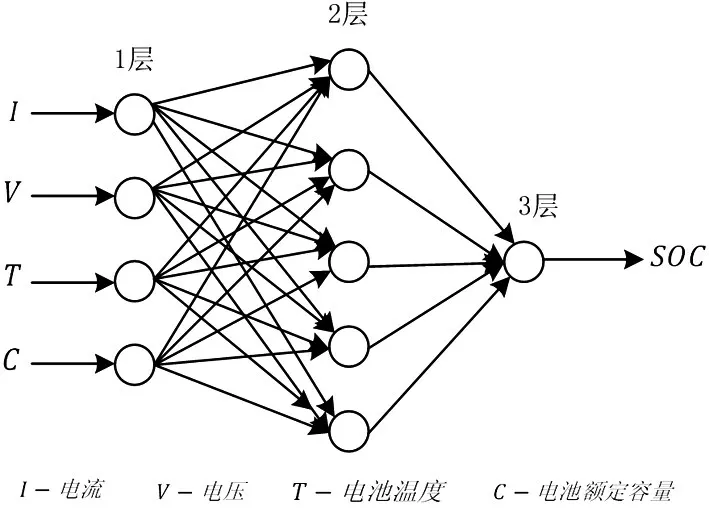
圖1 模糊邏輯與神經網絡法
1.4 開路電壓法
開路電壓法是比較簡單的測量方法,它可以利用電池電動勢來確定電池的SOC[7]。電池的SOC與開路電壓(Open Circuit Voltage,OCV)有良好的線性關系,開路電壓法即是利用OCV-SOC這一穩定的線性關系進行SOC估測[8]。OCV無法直接測量得出,無法用于車輛SOC實時估算。所以,它只適用在未工作狀態時刻的電池使用[9](圖2)。
1.5 支持向量機法
在非線性估計時,支持向量機(Support Vector Machine,SVM)估測精確度比最小二乘法還高,它可以利用數據點進行最優化并將結果轉化成為支持向量,只要它可以很好的優化,那么該算法可以提供較高的SOC估測精度[10]。
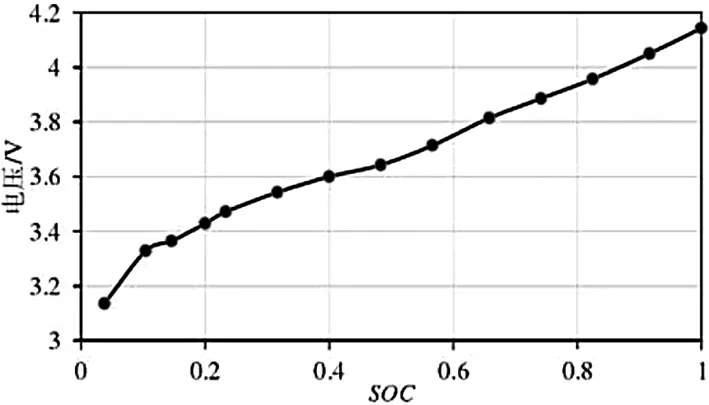
圖2 開路電壓法
以上各個SOC在線估測算法的優缺點總結為如表1所示。
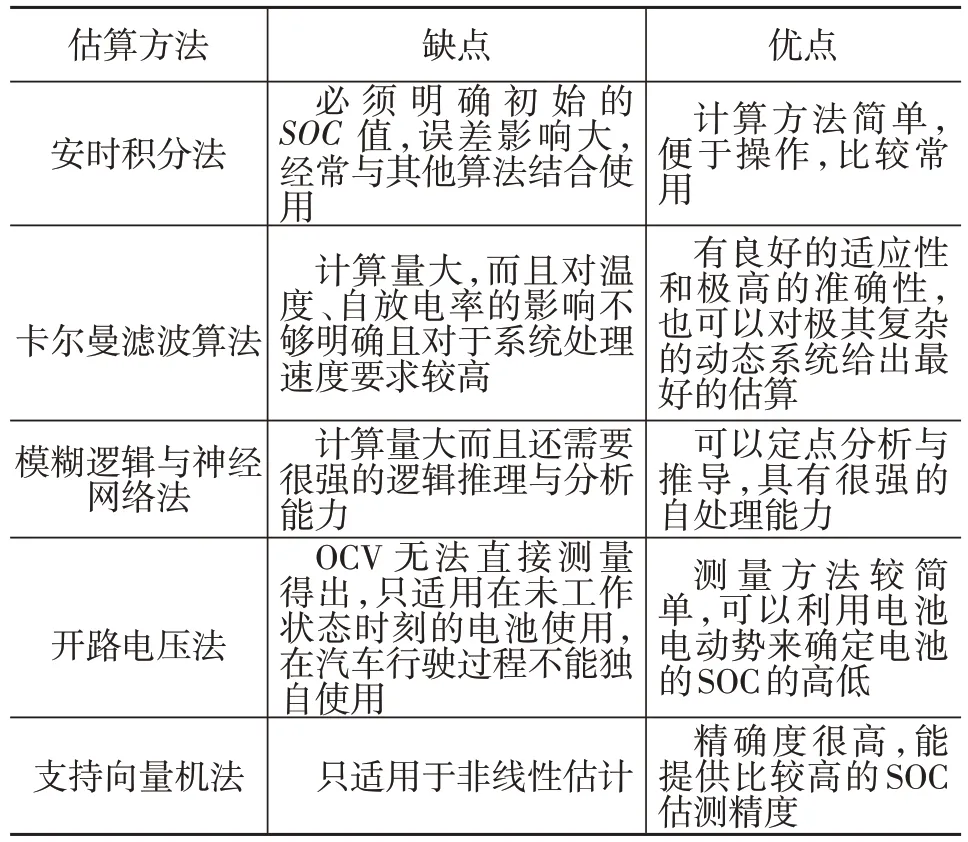
表1 SOC估測算法的比較
2 電池均衡管理方法
新能源電動汽車的電池均衡方法有很多,按傳統分類法可為2大類:
(1)被動均衡
(2)主動均衡
被動均衡是用電阻耗能元件并聯在電池電路中,使電壓高的一方電池能量轉化成熱能散發出去,實現電池間的均衡。這種方式叫做能耗型均衡,由于它是把能量轉化成熱能造成能量浪費,所以,該方法使用較少。主動均衡通過電感、電容、變換器從高電壓的電池中向低電壓的電池中進行輸送[11],這樣通過實現電池間的均衡,這種操作叫做非耗散型均衡。它可以分為2種方法:
(1)集中式均衡:主要采用正激變壓器和反激變壓器
(2)分布式均衡:主要包括Boost-Buck 變換和Cuk均衡法
電池均衡方法結構如圖3所示。
2.1 被動均衡方法
被動均衡結構簡單、成本低廉。只是在電池2 段并聯上電阻,當一方電池能量高于另一方時,閉合開關使能量高的電池通過電阻轉化成熱能讓各個電池組達到一致平衡。這種方式叫做電阻均衡法,但這種方法缺點是效率比一般方法效率低而且還會造成電池能量消耗大。
2.1.1 固定電阻分流法
固定電阻分流法是指把需要均衡的電池與電阻進行并聯,中間不需要任何輔助開關,直接把能量較高的電池能量轉換成熱能消耗掉,從而使各個電池的能量保持一致(圖4)。
2.1.2 開關電阻分流法
開關電阻分流法是指把需要均衡的電池與電阻進行并聯,中間需要加輔助開關,當某個電池需要均衡時,可以直接閉合它的開關,使電池與電阻導通,繼而達到均衡效果(圖5)。
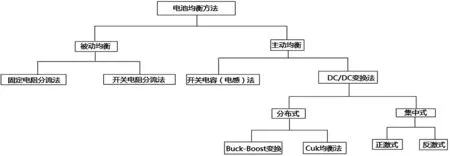
圖3 電池均衡方法結構
2.2 主動均衡方法
主動均衡方法也可叫做為能量轉移法,在充放電時,通過輔助設備把能量從高電位轉移至低電位,進而實現電池組的均衡充放電過程[12]。按照輔助元件的不同,又可分為開關電容均衡法與DC-DC 變換器式均衡法。
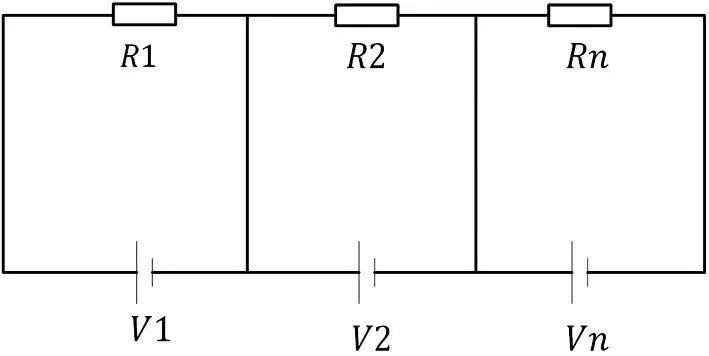
圖4 固定電阻分流均衡電路
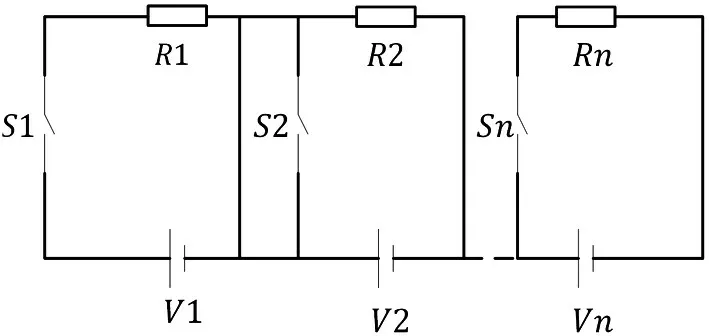
圖5 開關電阻分流均衡電路
2.2.1 開關電容(電感)均衡法
開關電容(電感)均衡法是指相鄰電池之間并聯一個電容器件。通過開關器件使電池之間來回變換電容從而實現高能量電池向低能量電池轉移能量。圖6 為開關電容(電感)均衡方法的電路圖,它由n 個MOSFET 管組成,以控制2 個電池組之間的能量均衡。當電池V1<V2時,M2導通M1關斷。V2與C1并聯,此時電池V2 的能量通過開關M2流入電容C1中;開關M2關斷M1導通,電池V1與C1并聯,C1中的能量通過開關M1傳遞給電池V1。完成這個過程以后,以此類推,通過控制開關的關斷和導通來實現電容的能量傳遞。
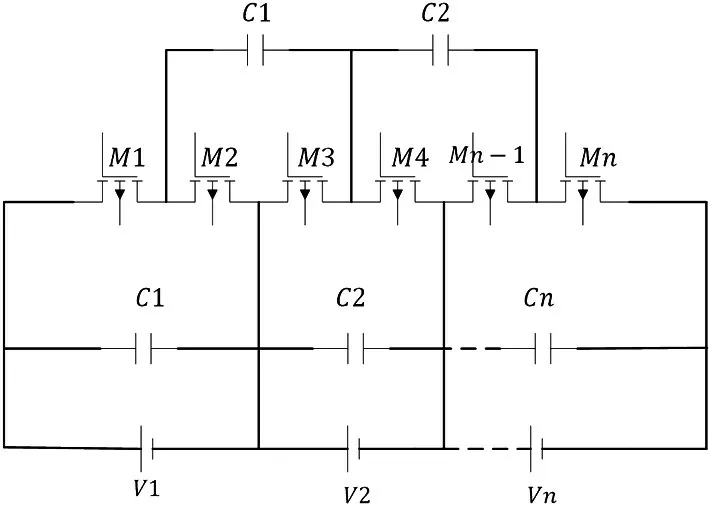
圖6 開關電容均衡電路
這種方法結構簡單、便于操作。但是,如果均衡電流過大則不能使用該方法,此方法只適用于小電流均衡,因此,它具有一定的局限性。
2.2.2 DC/DC變換器式均衡法
DC/DC 變換器式均衡法是利用開關管等半導體器件并結合儲能元件形成的均衡管理控制策略,通過算法控制開關管的通斷來達到調節功率的目的。DC/DC 變換器可將直流電壓轉化為可調的直流電壓,其中Buck-Boost、Cuk、Buck、Boost 是利用儲能元件使能量從高側向低側流動。此過程為分布式也可稱為直流斬波電路。正激型、反激型、半橋型能量少的一側電池所補充的能量是來自整個電池組中的能量,稱為集中式變換器,也稱為隔離型變換器[13]。DC/DC 變換器均衡法的優點是均衡效果好,控制靈敏度高,缺點是結構比其他均衡電路復雜并且成本高。以下是比較常見的拓撲圖。
(1)分布式均衡電路
分布式均衡電路有Buck-Boost 變換器均衡電路與Cuk 均衡電路。分布式均衡結構比其他均衡電路復雜,它是通過相鄰單體電池之間通過均衡器進行均衡操作從而實現電池組之間的能量平衡。
圖7 為Buck-Boost 變換器均衡電路方法,可將高容量電池中的電能通過DC/DC 變換器儲存至儲能裝置中,而后轉移至低容量單體電池。Buck-Boost 電路的設計可實現能量在單體間單向或雙向流動[14]。Buck-Boost 變換器均衡電路方法無能量損失,能靈活地轉換電壓大小實現充電、放電狀態下的均衡。在大功率運用和高頻工作下,可節約空間、減小設備體積,該方法適合運用在空間較小的地方。
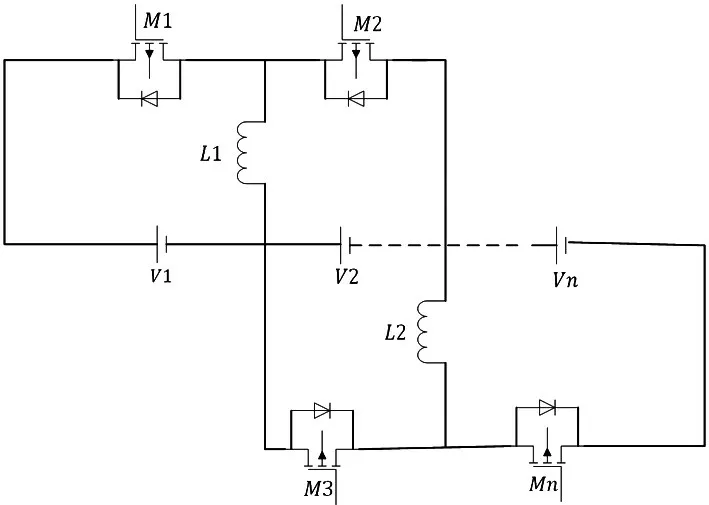
圖7 Buck-Boost均衡電路
圖8為Cuk均衡電路,該結構比較復雜,但均衡速度快,方向可以雙向傳輸。均衡開啟之前,電容C的電壓Vcj等于單體電池Bi-1的端電壓VBi-1加上單體電池Bi的端電壓VBi,即Vcj=VBi-1+VBi。Cuk 均衡器單元的串聯電池組的整體均衡電路拓撲圖,電路包含n個串聯的單體電池(或電池組)和n-1個Q開關。假設當Cuk 均衡電路中的VBi-1高于VBi時Q1關閉,Bi-1-Li-1- MI-1形成閉環BI-1的電能經過LI-1時一部分電能被存儲起來了。此時,Bi-1的電能下降。
(2)集中式均衡電路
常見的集中式均衡電路主要有正激式均衡電路與反激式均衡電路[15]。集中式電路是通過一個多輸出均衡器從而實現在電池組內能量之間的轉移,把電能高的能量向電能低的電池轉移,實現電池組能量均衡。
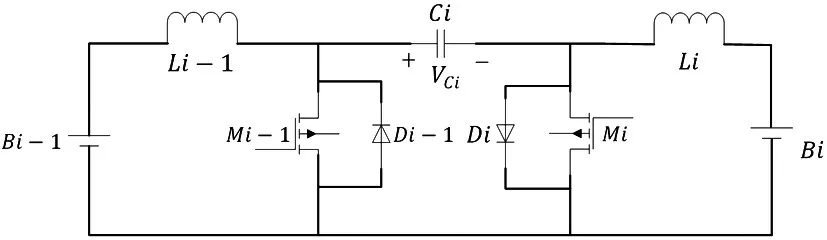
圖8 Cuk均衡電路
圖9所示為多繞組輸入的正激式均衡電路。每個單體電池都有均衡器,當單體電池電壓高于平均值時,其場效應管啟動,把單體電壓高的能量送到電池組上。該電路場效應管比較多,結構相對復雜而且成本高。
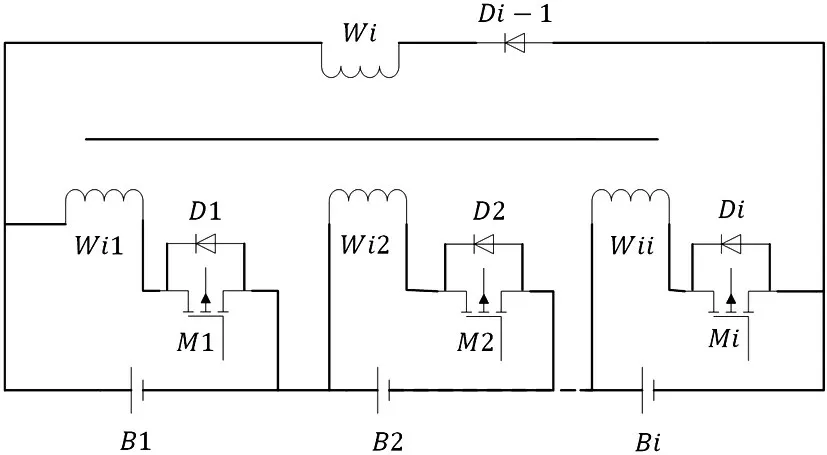
圖9 正激式均衡電路
圖10 所示是多繞組輸出反激式均衡電路。通過原邊副邊匝數比與場效應管通斷,實現讓電池電壓低的一側獲得較高的電流能量。該電路結構簡單,成本較低,容易控制。
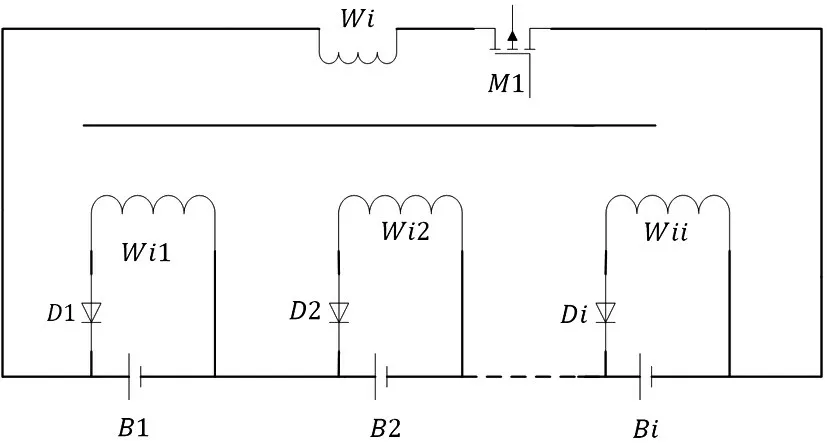
圖10 反激式均衡電路
3 總結

表2 各種均衡方式的比較
新能源電動汽車要在市場上大規模推廣,其電池性能與壽命的提高是關鍵。純粹提高單體電池壽命達到電池組的壽命是不現實的,提高電池組均衡效率和精度,才能最大限度的提高電池組使用壽命。
本文所述的各種動力電池均衡控制策略和均衡方法各有優劣。目前為止,沒有一個均衡方法可以同時兼顧均衡速度,均衡效率。均衡電路結構簡單,便于操作的均衡器對電池組的影響效果不好,然而,靈活性好,結構復雜的均衡器,成本高且不易控制。
為解決上述問題,解決動力電池組均衡控制發展是新方向。首先,研究新的均衡電路拓撲結構,可以利用軟開關,它體積小、損耗小、均衡控制模塊智能化。其次,SOC是不能直接測量出來的,需要電池的等效電路來對其進行在線估測,目前常用的估測方法有安時積分法、卡爾曼濾波法和神經網絡法,這些方法通常計算量大且不易實現。所以對這些估測方法進行算法優化可減少計算量來提高均衡模塊的效率、速度和準確度,從而實現提高電池使用壽命。最后,綜合傳統均衡器的優點把傳統均衡器混合均衡從中可以克服單個缺點,實現均衡電路地高效運行。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12