使用智能終端控制激光異物清除設(shè)備
2021-04-02 03:44:08劉傳利吳英迪蔡亞芬
電子技術(shù)應(yīng)用 2021年3期
楊 波,劉傳利,吳英迪,蔡亞芬
(中國(guó)信息通信研究院 泰爾系統(tǒng)實(shí)驗(yàn)室,北京100045)
0 引言
高壓電線上纏繞的異物是高壓輸電網(wǎng)絡(luò)線路故障的主要原因之一,其帶來的短路事故占到外力破壞引致事故的一半以上[1]。 因此,對(duì)輸電線上異物的及時(shí)清除是電力行業(yè)非常重視的問題。傳統(tǒng)使用輔助工具進(jìn)行人工清除的做法[2-3]效率較低;而使用無(wú)人機(jī)[4-5]、掛線機(jī)器人[6-8]等進(jìn)行清除的方法操控難度較大,自損率高,且容易帶來次生危害。 近年來,使用二氧化碳激光從地面遠(yuǎn)距離清除電線上異物的方法[9]憑借便于運(yùn)輸、操作方便、清除迅速、對(duì)輸電線纜的安全性[10]等優(yōu)點(diǎn)逐漸成為一種主流的清理方式。
在激光異物清除裝置中,對(duì)激光指向、焦點(diǎn)、功率等的控制決定了工作的精準(zhǔn)度和效率,因此其控制部分的硬件和算法至關(guān)重要。 針對(duì)清除任務(wù)中涉及的算法,例如視頻識(shí)別[11]、聚焦[12]、清除方式[13]等,很多研究者已進(jìn)行過深入研究。 但從已發(fā)表的研究成果來看,大多數(shù)的研究基于集驅(qū)動(dòng)、控制、運(yùn)算、操作界面于一體專用平臺(tái)(工控機(jī)等)進(jìn)行,大部分的設(shè)備也使用專用的工控機(jī)作為控制系統(tǒng)硬件的核心。 然而,在實(shí)際激光異物清除的任務(wù)中,絕大部分控制并不涉及復(fù)雜計(jì)算的大數(shù)據(jù)量的通信,無(wú)需高性能的計(jì)算平臺(tái)來完成;同時(shí),便攜智能電子設(shè)備(如智能手機(jī)、平板電腦等)在今天已經(jīng)非常普及,這些設(shè)備不僅能夠提供異物清除任務(wù)所需要的顯示反饋和人機(jī)接口,其算力也能夠勝任較為復(fù)雜的計(jì)算任務(wù)。 如果使用通用便攜終端實(shí)時(shí)控制激光異物清除裝置,相比現(xiàn)有的一體化控制系統(tǒng)而言,能提供如下便利:
(1)使用模塊化結(jié)構(gòu),將操控/顯示和機(jī)械/電子控制分離,便于硬件系統(tǒng)的維護(hù);
(2)使用通用設(shè)備實(shí)現(xiàn)系統(tǒng)的操控和顯示,提高系統(tǒng)適應(yīng)性,降低了系統(tǒng)的成本;
(3)將計(jì)算壓力轉(zhuǎn)移到通用設(shè)備中,大幅降低了機(jī)械/電子部分的硬件需求,降低了前端的成本;
(4)利用智能終端的網(wǎng)絡(luò)功能,可進(jìn)一步將復(fù)雜計(jì)算轉(zhuǎn)移到云/邊緣進(jìn)行,大幅提高了系統(tǒng)的靈活度;
(5)控制方法/算法相關(guān)的改動(dòng)僅需要進(jìn)行軟件升級(jí),且可以在線進(jìn)行。
基于這樣的想法, 本文提出并實(shí)現(xiàn)了一種利用便攜智能終端控制的激光異物清除系統(tǒng)的設(shè)計(jì)方案,并詳述了各部分的設(shè)計(jì)細(xì)節(jié)。
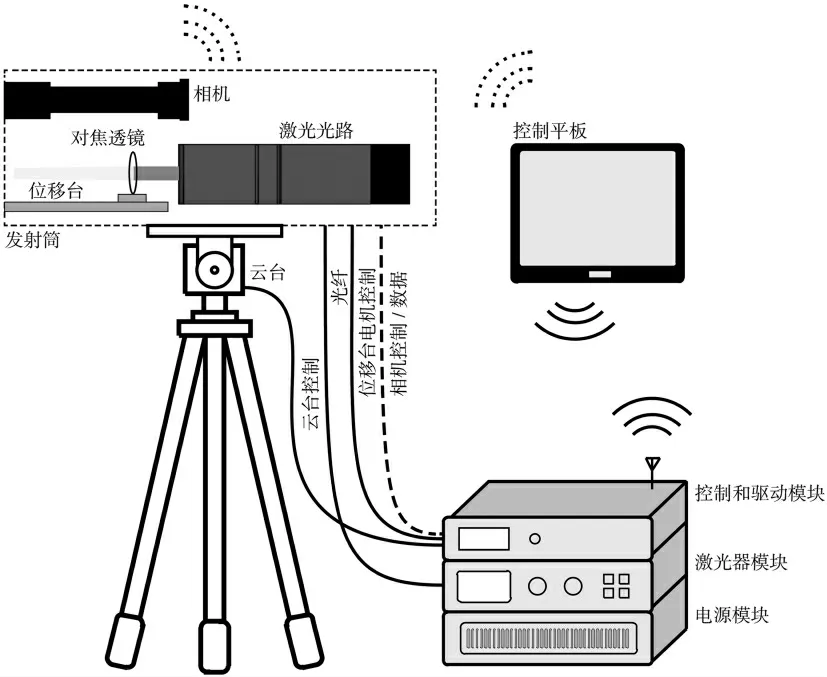
圖1 激光異物清除系統(tǒng)的構(gòu)成
1 原理
1.1 激光異物清除原理、設(shè)備和流程
激光異物清除裝置主要用于清除高壓電線上纏繞的風(fēng)箏、遮陽(yáng)網(wǎng)、塑料大棚等異物。清除設(shè)備置于地面,將大功率的激光聚焦在目標(biāo)物上,使其燃燒/熔化并脫落。 清除任務(wù)中,目標(biāo)物通常距離清除設(shè)備百米以上。在此距離上使用激光燒灼異物,需要對(duì)激光的指向和焦點(diǎn)進(jìn)行準(zhǔn)確控制。 為此,除激光器外,清除設(shè)備需要具備可水平/垂直旋轉(zhuǎn)的云臺(tái)以及用于調(diào)節(jié)調(diào)焦鏡頭所用的高精度滑臺(tái)。為了操控方便,定位準(zhǔn)確,需要選用清晰程度較高的相機(jī),并具備長(zhǎng)距離的光學(xué)變焦功能,以實(shí)現(xiàn)對(duì)目標(biāo)物體的視覺捕獲。
異物清除的主要流程為:首先依據(jù)相機(jī)圖像的反饋,通過控制接口控制云臺(tái)水平和垂直角度,使得激光器輸出的激光正對(duì)目標(biāo);以低功率輸出激光,并通過異物上焦點(diǎn)的大小反饋,調(diào)整對(duì)焦鏡頭的位置,使激光能夠聚焦在異物上,提高功率密度;之后,選擇合理的清除方式(如點(diǎn)燒、掃描等),確定清除作業(yè)時(shí)云臺(tái)的動(dòng)作軌跡及激光器的輸出功率。 開始作業(yè)后,控制系統(tǒng)將依據(jù)之前選定的清除方式和坐標(biāo)位置自動(dòng)控制云臺(tái)的旋轉(zhuǎn)及激光器的輸出,從而實(shí)現(xiàn)對(duì)異物的清除。
1.2 對(duì)控制系統(tǒng)的需求
從以上任務(wù)及流程描述可以看出,設(shè)備的控制系統(tǒng)需要準(zhǔn)確控制二維云臺(tái)的指向、透鏡的位置、激光器的開關(guān)以及功率的能力,并控制相機(jī)參數(shù)(焦段、曝光等),顯示反饋的圖像/視頻,并提供相應(yīng)操作界面。
在實(shí)際使用中,目標(biāo)的尋找、激光焦點(diǎn)的調(diào)整等均屬于一次性工作;而清除方式一旦確定,云臺(tái)的控制軌跡和激光器的功率控制也是完全確定的。完整作業(yè)流程中,對(duì)數(shù)據(jù)鏈路的流量和計(jì)算的需求主要集中針對(duì)視頻的編解碼和可能的處理工作上。由于大部分相機(jī)支持直接通過有線或無(wú)線接口和便攜智能終端(手機(jī)、平板等)交換視頻和控制數(shù)據(jù),可以將這一部分分離出來,剩余對(duì)于執(zhí)行機(jī)構(gòu)的控制工作即可以在很低成本和功耗下,在較小的體積內(nèi)實(shí)現(xiàn)。這樣的設(shè)計(jì)相當(dāng)于將傳統(tǒng)一體化控制系統(tǒng)拆成了兩個(gè)部分:用于控制和驅(qū)動(dòng)設(shè)備的低成本模塊和一塊以便攜智能終端為核心的控制器。前者控制各執(zhí)行機(jī)構(gòu)的運(yùn)動(dòng),后者負(fù)責(zé)圖像顯示、參數(shù)運(yùn)算并提供人機(jī)交互接口。 二者通過無(wú)線網(wǎng)絡(luò)交換數(shù)據(jù)。 圖1為設(shè)備整體形態(tài)的示意圖。
2 方法
2.1 硬件設(shè)計(jì)
圖1 所示結(jié)構(gòu)中控制與驅(qū)動(dòng)部分的硬件主要包括兩個(gè)功能:針對(duì)執(zhí)行機(jī)構(gòu)(云臺(tái)、對(duì)焦滑臺(tái)、激光器)的控制,以及與控制終端的無(wú)線通信。 為通用性及維護(hù)方便之考慮,將其作為兩個(gè)獨(dú)立模塊分別進(jìn)行了開發(fā)。
針對(duì)執(zhí)行機(jī)構(gòu)的控制中,調(diào)整云臺(tái)角度以及透鏡的位置均可以歸結(jié)為對(duì)步進(jìn)電機(jī)的控制,對(duì)控制電路的要求為方向和步進(jìn)脈沖的輸出。激光器的開關(guān)通過開關(guān)量信號(hào)實(shí)現(xiàn),其功率的調(diào)節(jié)通過模擬電壓信號(hào)輸出。 為實(shí)現(xiàn)這一應(yīng)用包含的多路開關(guān)量、脈沖信號(hào)以及模擬電壓輸出的需求,使用了一塊帶有多路PWM 信號(hào)輸出和DAC 的低成本通用單片機(jī)STM32F103ZET6 作為執(zhí)行機(jī)構(gòu)控制板的主要處理器。
為了顧及顯示和人機(jī)接口的通用性,選用了所有便攜式智能終端均支持的WLAN 作為控制系統(tǒng)的主要無(wú)線通信方式。 盡管部分高端的單片機(jī)/ARM 芯片能夠直接或配合Ethernet PHY 芯片和LwIP 等協(xié)議棧實(shí)現(xiàn)IP 網(wǎng)絡(luò)功能[14],考慮到網(wǎng)絡(luò)通信占用單獨(dú)線程可能對(duì)控制任務(wù)帶來時(shí)間上不利的影響,本文使用了另一塊獨(dú)立的低成本處理器樹莓派計(jì)算模塊(Raspberry Pi Compute Module,下稱Rpi-CM)進(jìn)行對(duì)設(shè)備控制電路的命令下發(fā),并通過其USB 接口,利用USB-WLAN 無(wú)線網(wǎng)卡,或者利用USB-ETH PHY 加上無(wú)線路由器實(shí)現(xiàn)設(shè)備本身與外界的無(wú)線IP 通信。 Rpi-CM 是樹莓派基金會(huì)發(fā)布的一塊帶有CPU、內(nèi)存和片上存儲(chǔ)器的DDR2 內(nèi)存條尺寸的工業(yè)級(jí)模塊[15],其完整的操作系統(tǒng)Raspbian 提供了對(duì)IP 網(wǎng)絡(luò)協(xié)議的完全支持。 Rpi-CM 并不能獨(dú)立使用,需要為其開發(fā)擴(kuò)展板,引出各個(gè)接口用于與其他設(shè)備的連接。 在控制系統(tǒng)的設(shè)計(jì)中,選用了SPI 和若干GPIO 作為通信板與執(zhí)行機(jī)構(gòu)控制板之間數(shù)據(jù)交換的接口, 以保證通信的速率和實(shí)時(shí)性。 控制系統(tǒng)的結(jié)構(gòu)和控制/通信方式設(shè)計(jì)如圖2 所示。
2.2 軟件流程
系統(tǒng)設(shè)計(jì)中,對(duì)執(zhí)行機(jī)構(gòu)的控制與控制軟件的解耦,使得在設(shè)備內(nèi)部的兩塊CPU基本沒有運(yùn)算壓力。 通信板僅需要“轉(zhuǎn)譯”控制終端發(fā)來的命令給設(shè)備控制板,并按照特定的需求查詢?cè)O(shè)備的各項(xiàng)狀態(tài),反饋給控制終端;執(zhí)行機(jī)構(gòu)控制板則僅需要根據(jù)通信板通過SPI 傳輸過來的命令執(zhí)行相應(yīng)的驅(qū)動(dòng)動(dòng)作。 只要在設(shè)計(jì)時(shí)保證各項(xiàng)控制指令和動(dòng)作能夠涵蓋對(duì)各執(zhí)行設(shè)備的所有操作,這兩部分的功能是完全確定的,幾乎不需要維護(hù)和升級(jí)。
另一方面, 控制整體流程的軟件在控制終端上編寫和運(yùn)行。 在具備Windows/Linux/Android/iOS 操作系統(tǒng)的高性能智能終端中編寫程序,獲取相機(jī)的圖像數(shù)據(jù)進(jìn)行計(jì)算并輸出相應(yīng)控制動(dòng)作,相較在嵌入式系統(tǒng)中進(jìn)行相應(yīng)開發(fā)而言技術(shù)門檻更低,更加易于移植和維護(hù)。結(jié)合前述流程,3個(gè)處理器的主要軟件流程及相互協(xié)同如圖3 所示。 設(shè)備正常上電后,通信板將啟動(dòng)一個(gè)TCP 服務(wù)器, 等待控制用的便攜式智能終端(下稱控制終端)連接。 控制終端中的APP 啟動(dòng) 時(shí),將會(huì)主動(dòng)連接這一服務(wù)器,并進(jìn)行身份校驗(yàn)等工作。連接成功后,控制終端將發(fā)起對(duì)整個(gè)系統(tǒng)的初始化,并在后續(xù)繼續(xù)向通信板中的服務(wù)器傳遞參數(shù),通過其控制各個(gè)設(shè)備協(xié)同動(dòng)作。
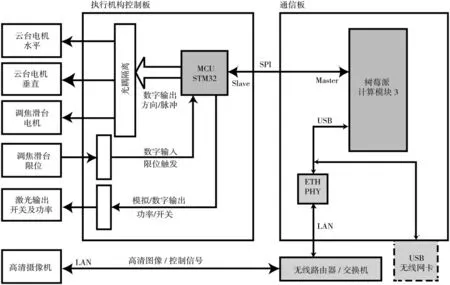
圖2 控制模塊的結(jié)構(gòu)和通信方式
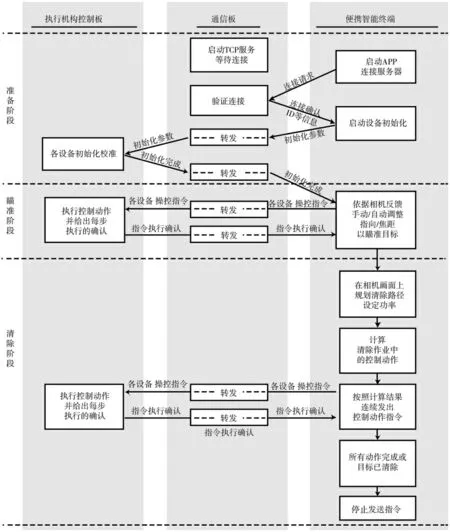
圖3 控制系統(tǒng)軟件流程
可以看到,所有流程中的計(jì)算幾乎完全發(fā)生在控制終端上。 在瞄準(zhǔn)、清除的階段,可以手動(dòng)識(shí)別和處理,也可以依托控制終端的圖像處理能力,部署相應(yīng)算法進(jìn)行調(diào)整。 對(duì)于對(duì)算力要求高的任務(wù),在控制終端本身算力不足的情況下,亦可以利用其本身的網(wǎng)絡(luò)連接能力(如4G、5G 等)將圖像和視頻信號(hào)傳輸?shù)皆贫?邊緣的計(jì)算服務(wù)器,并依托在其上部署的算法進(jìn)行運(yùn)算。
傳統(tǒng)的激光異物清除系統(tǒng)中,部分步驟(例如用相機(jī)的長(zhǎng)焦鎖定目標(biāo)、激光聚焦調(diào)整等功能)手動(dòng)操作耗時(shí)費(fèi)力。以鎖定目標(biāo)功能為例,相機(jī)在廣角狀態(tài)下,依據(jù)圖像進(jìn)行位置控制的精度不足;而在長(zhǎng)焦?fàn)顟B(tài)下視野很窄,難以在視野中捕獲目標(biāo)物,實(shí)際操作中常常需要反復(fù)切換。 在文中所述系統(tǒng)中,利用在控制終端中部署的圖像識(shí)別等算法,在廣角狀態(tài)下選取目標(biāo)物后,可以在調(diào)整焦段的過程中同步調(diào)整云臺(tái),保證目標(biāo)物始終處在視野的中心,從而提高控制的效率。
3 討論
相比于一體化的系統(tǒng)或有線傳輸?shù)南到y(tǒng),通過無(wú)線通信實(shí)現(xiàn)控制反饋可能會(huì)帶來一定額外的時(shí)延。在目標(biāo)捕獲、對(duì)焦等精細(xì)調(diào)整的過程中,可能需要適當(dāng)降低執(zhí)行機(jī)構(gòu)動(dòng)作速率、增加步進(jìn)時(shí)間或加入預(yù)測(cè)性控制算法,以降低時(shí)延帶來的影響。 由于該設(shè)備大部分應(yīng)用場(chǎng)景在電磁干擾較小的戶外/野外,當(dāng)前這一問題帶來的影響并不顯著。 隨著通信技術(shù)的演進(jìn),5G、Wi-Fi6 等技術(shù)的普及和應(yīng)用將進(jìn)一步降低控制系統(tǒng)的時(shí)延,從而改進(jìn)控制系統(tǒng)的性能。在文中所述的模塊化控制系統(tǒng)設(shè)計(jì)中, 完全可以在不重新設(shè)計(jì)/生產(chǎn)任何硬件情況下完成此類通信方式和控制終端的升級(jí)和更換。
4 實(shí)際設(shè)計(jì)和實(shí)驗(yàn)結(jié)果
根據(jù)以上想法,使用STM32F103ZET6 單片機(jī)和樹莓派計(jì)算模塊開發(fā)了一套完整控制系統(tǒng),并在一套激光異物清除的設(shè)備中得到應(yīng)用。 控制系統(tǒng)成品如圖4 所示。
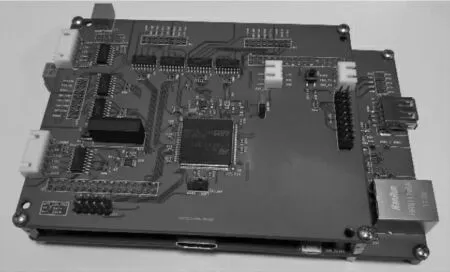
圖4 執(zhí)行機(jī)構(gòu)控制板和通信板
在測(cè)試用系統(tǒng)中,控制終端使用了通用的Windows平板,使用觸摸屏幕直接控制。 軟件手動(dòng)方式下可以通過各按鈕控制執(zhí)行機(jī)構(gòu)的運(yùn)作,并可以在攝像機(jī)捕捉的圖像上直接進(jìn)行選點(diǎn)瞄準(zhǔn)等操作。測(cè)試系統(tǒng)的控制軟件的界面如圖5 所示。

圖5 測(cè)試用控制軟件界面
在已經(jīng)進(jìn)行的測(cè)試實(shí)驗(yàn)中,控制系統(tǒng)能夠在便攜式智能終端的控制下準(zhǔn)確控制設(shè)備清除一百米之內(nèi)模擬電線的目標(biāo)物上纏掛的異物。 實(shí)際實(shí)驗(yàn)結(jié)果如圖6 所示。圖中從左到右分別為對(duì)線纜上地膜、樹枝、尼龍線繩的清除實(shí)驗(yàn)。針對(duì)地膜和風(fēng)箏,使用的是線性掃描模式,即激光焦點(diǎn)在兩個(gè)工作點(diǎn)附近往復(fù)切割;針對(duì)樹枝使用的是點(diǎn)燒模式,即將激光焦點(diǎn)集中在固定位置,直至目標(biāo)清除。 實(shí)驗(yàn)表明,該控制系統(tǒng)的控制速度和精度能夠滿足實(shí)際應(yīng)用的需求。
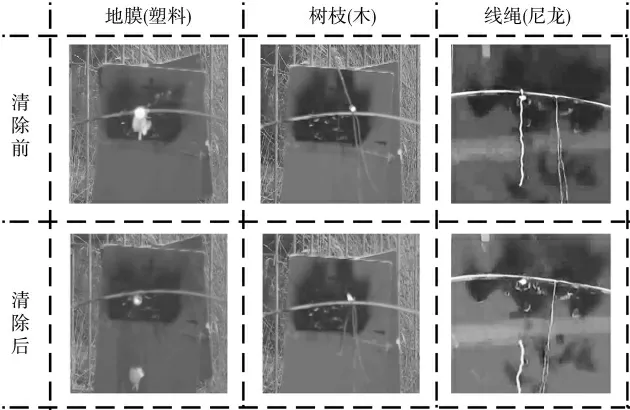
圖6 實(shí)際清除作業(yè)
5 結(jié)論
以上的原理分析和實(shí)驗(yàn)結(jié)果證明,將激光異物清除設(shè)備的控制界面和計(jì)算任務(wù)分離出來轉(zhuǎn)移到便攜智能終端上,并利用無(wú)線連接對(duì)設(shè)備進(jìn)行操控的方法,能夠在實(shí)現(xiàn)功能的前提下降低控制系統(tǒng)的體積/成本,并提高使用的靈活性。 使用本文所設(shè)計(jì)的低成本控制系統(tǒng), 輔以無(wú)線連接的通用便攜式智能終端,可以完整、精確地實(shí)現(xiàn)控制激光異物清除設(shè)備清除高壓線纜上異物的功能。
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
- 電子技術(shù)應(yīng)用的其它文章
- 基于Hyperledger Fabric 的食品溯源系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
- 基于HLS 工具的CNN 加速器的設(shè)計(jì)與優(yōu)化方法研究*
- 應(yīng)用于電推進(jìn)系統(tǒng)的寬輸入電壓范圍高壓電源研究*
- 一種全自動(dòng)螺絲供料機(jī)控制系統(tǒng)的設(shè)計(jì)與分析*
- 基于PowerPC 架構(gòu)的波束指向算法的優(yōu)化
- 基于CNN-LSTM 神經(jīng)網(wǎng)絡(luò)的聲紋識(shí)別系統(tǒng)設(shè)計(jì)