機器人汽車主胎隨動安裝技術研究
2021-03-30 10:44:52齊黨進
中國設備工程 2021年6期
齊黨進
(上海發那科機器人有限公司,上海 201906)
隨著產業的升級和工業4.0 的推進,機器人越來越多地出現在汽車總裝車間。在主輪胎安裝領域,存在2 種解決方案,即帶直交軌道擰緊機方案和機器人擰緊方案。帶直交軌道擰緊機方案采用直交軌道實現擰緊機的自動移栽,增加主胎安裝機實現半自動安裝,但仍需要人工進行螺母(螺釘)安裝和預擰緊;無法解決安裝位置的3D 補償,需要人工對準和施加預壓力。機器人擰緊方案,由機器人手持多軸擰緊機實現自動擰緊,但要求車身傳輸線做較多改造,且只能實現定點安裝,也無法滿足柔性生產的需求,卻造成了擰緊軸電纜易損壞和可靠穩定裝配下降的后果。但是,相關的工藝研究和開發相對較少,且主要與輪胎輸送相關。
因此,通過對機器人技術、擰緊技術、3D 視覺補正和隨動技術等的研究,應對隨動安裝需求,本文提出了一種汽車主胎安裝擰緊系統,搭建了一個安裝測試平臺進行可行性分析和工藝研究,并以此為基礎開發了全新的汽車主胎安裝擰緊系統,實現了隨動安裝。
1 汽車主胎安裝擰緊系統
1.1 系統布局
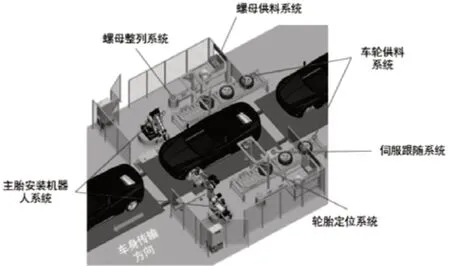
圖1 汽車主胎安裝擰緊系統示意圖
如圖1 所示,本系統包含2 套主胎安裝機器人系統、螺母供料系統、螺母分料系統、車輪供料系統、伺服跟隨系統、機器人控制柜&電控柜系統等,上下兩側對稱排布。
1.2 隨動安裝機器人系統
如圖2 所示,隨動安裝機器人系統包括機器人系統、3D相機系統、輪胎擰緊機和專用管線包4 部分,實現汽車螺母(或螺釘)的自動拾取、主胎的自動拾取、主胎類型的自動識別、主胎安裝位置的3D 補償、主胎的安裝和自動擰緊。

圖2 隨動安裝機器人系統
1.3 伺服跟隨系統
如圖3 所示,伺服跟隨系統主要由伺服驅動系統、導向系統、跟隨系統、車身定位工裝和支撐板組成,實現機器人跟隨車身傳輸線運動。伺服驅動系統作為機器人的外部軸,由機器人統一控制并實現左右同步運行,當車身進入主胎安裝區域,車身將被二次定位并固定到車身定位工裝上,并由伺服驅動系統驅動以恒定速度前行;如圖3 左側放大圖所示,跟隨系統由線跟蹤編碼器、驅動齒輪、控制板卡和線纜等組成,與伺服驅動系統直接相連,確保機器人可以跟隨車身運動,實現隨動安裝;導向系統用于防止車身發生方向偏移。
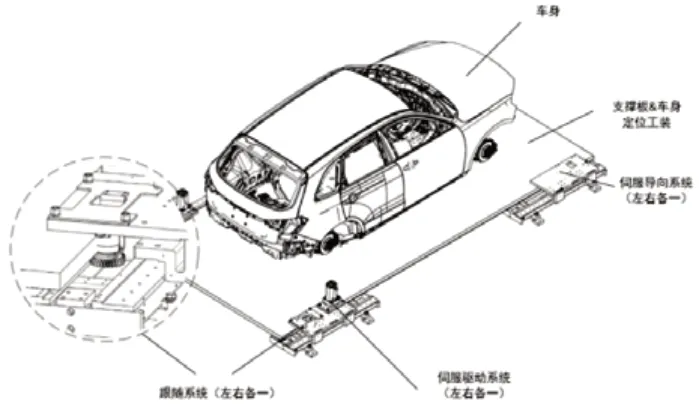
圖3 伺服跟隨系統示意圖
1.4 主胎隨動安裝流程
如圖4 所示,隨動安裝的主流程為機器人動作流程,子流程為車身傳輸流程、螺母(螺釘)供料流程和輪胎供料流程。左右側輪胎安裝機器人各自拾取所需螺母(螺釘),并將其壓到待裝配主胎上,然后拾取待裝配輪胎,等待伺服隨動系統就位;伴隨機器人拾取螺母(螺釘)和輪胎,車身進入安裝區域,并通過二次定位鎖定到隨動工裝上后,由伺服隨動系統驅動前行,接著觸發開始安裝信號;在隨動安裝信號觸發后,兩側輪胎安裝機器人跟隨車身完成3D 視覺定位、主胎安裝和螺母(螺釘)擰緊,在確認安裝完畢后,進入下一流程。
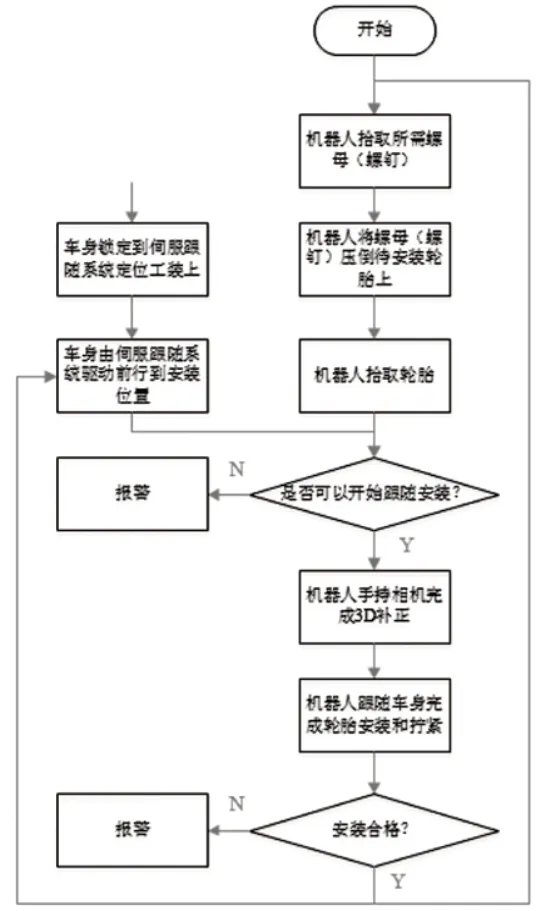
圖4 主胎隨動安裝流程
2 隨動安裝測試和分析
2.1 測試平臺
如圖5 所示,在機器人主胎安裝工藝研究的基礎上,建立了一個可以進行工藝技術測試、工藝深入研究和實驗展示的測試平臺。系統包括一套隨動安裝機器人系統、模擬輸送/伺服隨動系統(采用標準行走軸運載車橋模擬車身傳輸和伺服跟隨系統)、模擬車橋系統、輪胎上料臺、螺母暫存臺和電控系統等。
2.2 跟隨誤差測試和分析

圖5 隨動安裝測試平臺
為了研究主胎隨動安裝過程中的跟隨誤差,將激光位移傳感器綁定在輪胎擰緊機手爪上,測試跟隨狀態下,手爪與模擬剎車車盤總成之間的定位偏差值。其中,以開始跟隨的點,機器人示教的安裝點和跟隨結束的點作為3 個跟隨誤差測試點,測試結果如圖6。
分析測試數據,可以得到以下結論:
(1)汽車傳輸方向的跟隨誤差幾乎不受車身傳輸速度的影響;
(2)分析跟隨趨勢,跟隨誤差絕對值遵循由大變小再偏大的趨勢,即機器人開始跟隨時,距離安裝目標偏差大,正向偏差與負向定位偏差都有,隨后,誤差越來越小,并在結束跟隨前,誤差變大,值基本與開始時接近;
(3)根據跟隨誤差的趨勢情況,必須在跟隨的中間段完成安裝和擰緊作業,否則,直接會影響主胎安裝和擰緊的成功率;
另外,跟隨誤差與線跟蹤坐標系的準確性有極大關系,必須確保跟隨誤差的準確性,否則直接會影響主胎安裝和擰緊的成功率。
2.3 跟隨時間測試和分析
進一步,對整個主胎隨動安裝的時間參數進行了測試,結果如圖7。
分析以上數據,得到如下結論:
(1)機器人速度越快,所需跟隨時間越短,行走軸速度越快,所需跟隨時間也越短;
(2)但是,當車身傳輸速度≥100mm/s 時,跟隨時間受車身傳輸速度影響極小;
(3)為了達到跟隨安裝的目的,跟隨時間需要大于擰緊時間,約為5s。
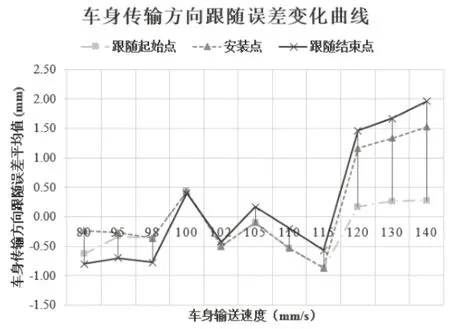
圖6 車身傳輸方向跟隨誤差變化曲線
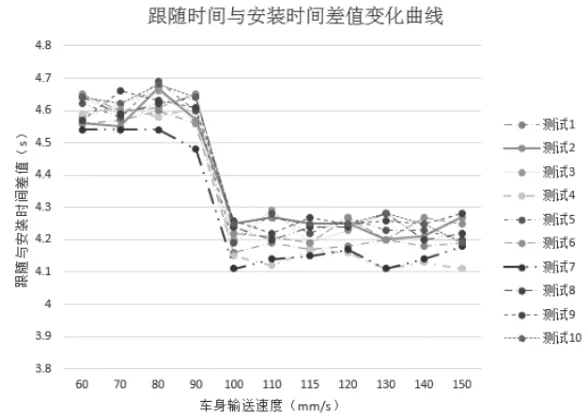
圖7 跟隨時間與安裝時間變化曲線
3 結語
綜上,針對汽車總裝中對機器人隨動安裝主胎的市場需求,借鑒了前人的研究和開發成果,對機器人用主胎安裝擰緊系統、3D 視覺補正和隨動安裝進行了研究。本文提出了一種利用伺服跟隨系統驅動車身,3D 視覺系統進行視覺補正的隨動安裝方法;通過汽車主胎安裝測試平臺的測試驗證,確定了隨動安裝的可行性,并以此為基礎開發了全新的汽車主胎安裝擰緊系統,為汽車總裝,特別是主胎隨動安裝提供了全新的解決方案。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
