智能全站儀在地鐵隧道工程自動化監測的應用★
2021-03-30 01:51:58王賓賓
山西建筑 2021年7期
金 鴻 王賓賓
(中鐵第一勘察設計院集團有限公司,陜西 西安 710043)
1 概述
地鐵是一種特殊的地下工程,空間狹小、環境復雜,隧道在地面建筑設施和地下施工環境的影響下時常出現變形,而隨著我國地鐵線路開通數的增加,相應的地鐵事故頻繁發生,給國家和個人帶來巨大的經濟損失[1]。為確保地鐵周邊環境及設施的安全,使地鐵隧道施工能夠順利進行,加強施工過程中的地鐵隧道監測和基坑具有非常重要的意義。
地鐵隧道變形監測具有高精度、高頻率和高時效性的特點,但是地鐵隧道變形監測[2]環境復雜,天窗時間段,存在安全隱患,傳統人工作業模式難以滿足地鐵監測的要求。采用全天候、自動化的變形監測[3]方式是地鐵隧道監測的最優方案,全站儀自動化變形監測系統可以對變形監測區域進行全天候、高精度、高頻率、安全穩定的數據采集分析[4],生成變形曲線和變形報告,預測安全事故、消除隱患,保證地鐵的安全施工和運營。
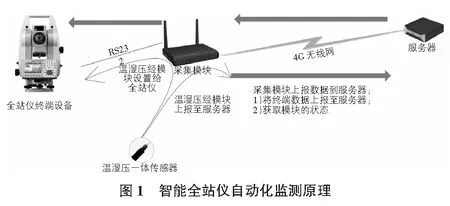
2 智能全站儀[5]自動化監測原理
基于瑞士徠卡TS50智能型全站儀(測角精度:±0.5″;測距精度:±(0.6 mm+1 ppm))和自動監測軟件建立監測系統,如圖1所示。測量地表在三維方向——X,Y,Z方向(其中:X,Y為水平方向,Z為垂直沉降方向)的變形變位值。采用全站儀極坐標法[6]和三角高程法[7]自動觀測隧道每個斷面的監測棱鏡,利用每個棱鏡觀測的三維坐標,分別進行隧道豎直位移、隧道水平位移和徑向收斂的計算,其中,利用拱頂棱鏡的Z值計算隧道豎向位移,利用隧道拱腰位置兩個棱鏡的X值計算水平位移和水平收斂,利用拱頂棱鏡和軌道上棱鏡計算豎向收斂[8]。采用全站儀極坐標法和三角高程法自動觀測隧道每個斷面對應道床的2個監測棱鏡,利用每個棱鏡觀測的坐標Z值和斷面間距,分別進行道床橫向高差和徑向高差計算。
3 工程概況
某地塊工程場地位于西安市科技六路以南、唐延路以東、木塔寺公園以北;場地西北角為地鐵六號線車站施工工地。項目北側為地鐵六號線木塔寺站,基坑北側開挖底邊線距離地鐵征地范圍線約7.9 m,距離木塔寺站點基坑圍護樁約21.3 m;西側臨近地鐵六號線盾構區間,基坑西側開挖底邊線距離地鐵范圍線約12.2 m,盾構區間軌頂標高為392.076 m~394.648 m。地鐵六號線科技八路—木塔寺右線盾構區間(YDK25+133~YDK25+371),長度為238 m,要求對該工程影響范圍內的相關結構進行監測。
4 自動化監測方案設計
首先建立智能監測終端和測量機器人的通信,將智能監測終端的串口通信參數設置成與智能全站儀一致,然后對全站儀設站,為全站儀建立獨立坐標系,其測站坐標和軸向可任意設置,但通常將Y軸設置為沿隧道方向,接著按照順序對各監測點進行學習,主要獲取各監測點的水平角、垂直角和斜距,最后為監測點分組并制定監測計劃進行數據采集[9],得到各變形點的三維坐標、變形量及變形曲線圖,根據設置軟件還可以將原始觀測數據及差分處理后數據通過報警模塊發送至聯系人。
結合本項目的特點及規范[10]的要求,主要監測項目及控制指標如表1所示。
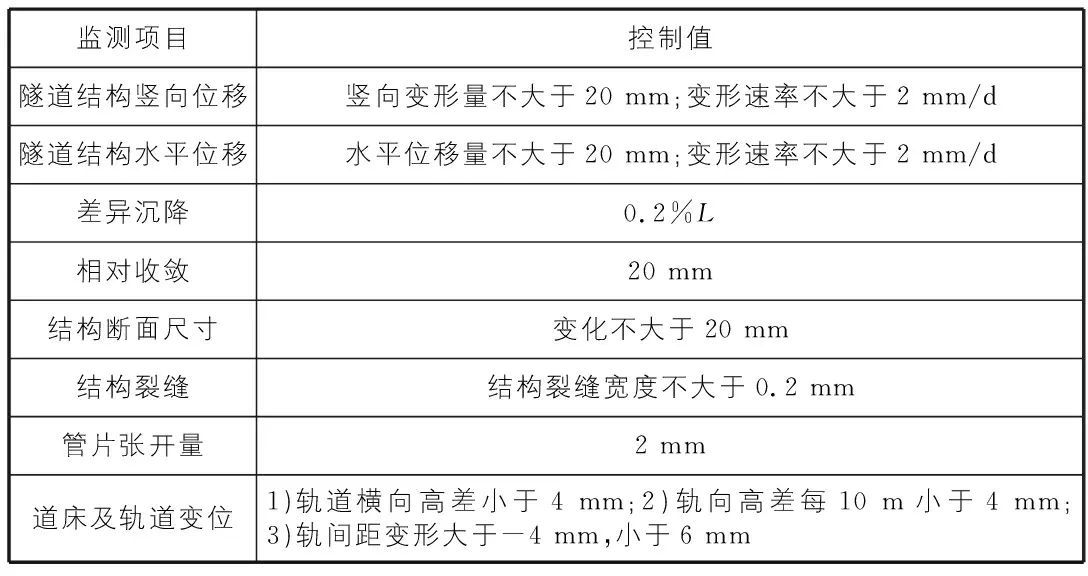
表1 地鐵盾構區間結構監測項目控制指標
4.1 基準的選取及布設與建立
基準點通常布設在變形區50 m以外的隧道中,布點個數可根據內部環境靈活設置,但應盡量大于3個,高程和平面共用,控制點選用大棱鏡,安裝在隧道主體結構上,以提高監測精度。基準點和測站點的點位布設位置如圖2所示。
監測基準網的布設要根據現場的實際情況進行鉆孔方式埋設,基準點埋設在相對穩定和方便使用的位置,遠離震動設備,便于長期保存,通視條件良好,并定期檢查基準點的穩定性。
基準網的建立通過空間自由設站邊角交會[11]的方式取得。
4.2 工作基點和監測點的選取及布設
4.2.1工作基點布設
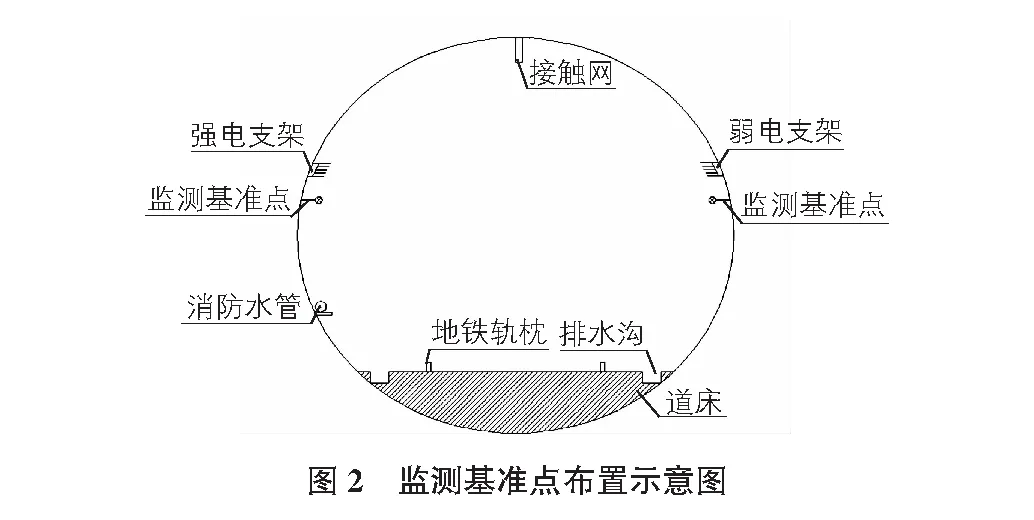
全站儀布置在監測區段的中部,使全站儀兩側范圍基本相同,從而使各監測點的誤差盡量均勻。全站儀托架采用不銹鋼材料制作,安置于隧道側壁,離道床1.2 m左右。其最外側距墻壁40 cm,儀器距離設備限界約60 cm,距線路中心線1.7 m,在空間上足以架設測量儀器,可有效避免各種設備阻擋測量視線及傳輸信號之間的相互干擾,方便全站儀自動尋找目標并保證測量精度智能全站儀安裝見圖3,現場布設工作基點2個。
4.2.2監測點布設及埋設
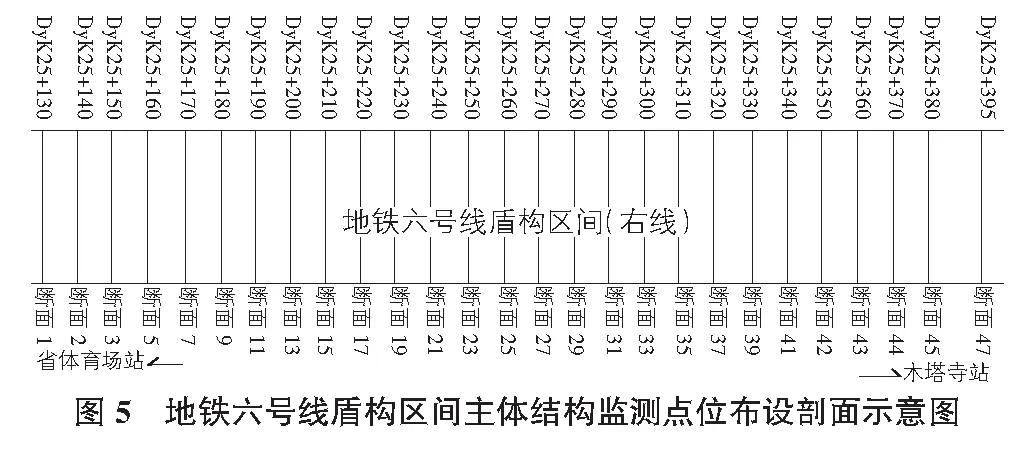
根據規范和項目安全評估方案要求,地鐵盾構區間段落,結合基坑與地鐵既有結構的關系,與基坑對應位置的監測點斷面間距按照5 m布置(總長度約190 m,小計布設39個),其余監測范圍內的斷面間距按10 m布置(總長度約50 m,小計布設8個),共計布設44個斷面,在每個斷面道床軌道兩側、隧道兩側拱腰位置、拱頂(根據實際情況避開高壓接觸網線位置)各設立1個監測點,每個斷面布設5個點位,用于監測隧道結構豎向位移、平面位移、相對收斂、隧道尺寸、道床橫向高差、道床豎向高差等內容,棱鏡距隧道壁3 cm~5 cm,監測斷面點位布設如圖4所示。盾構區間斷面編號從小里程由左至右分別編號為SGC1-1,SGC1-2,…,SCG1-5,SCG44-1,SCG44-2,…,SCG44-5,如圖5所示。在對應斷面相鄰的管片上加裝棱鏡,位置在隧道腰部平行,用于監測隧道管片張開量,共計布設44個。

4.3 觀測要求及監測精度
1)采用徠卡TM50智能型全站儀,該全站儀具有自動目標識別和精確瞄準的功能,而且具有小視場模式,尤其適用于地鐵隧道狹長工程。全站儀外接數據傳輸模塊(DTU),接受DTU的指令調度進行數據采集,通過4G/5G網絡將數據實時發送到服務器。
2)每次測量應采集控制點和監測點的數據,以控制點坐標為基準對全站儀進行后方交會,計算出全站儀的三維坐標值,以此來推算各監測點的三維坐標。
3)變形分析前應首先設置初值,全站儀在經過一段時間觀測后,選擇前面幾期較為穩定的數值取平均后作為初值,后續測量以該初值為基準進行變形分析。
平面控制點要定期與附近的控制基標進行連測,當控制點發生位移時,在進行位移監測時應把控制點的位移累加進去,作為最終的位移值。
監測觀測要求及精度要求如表2~表5所示。

表2 水平角測量
水平角測量采用方向觀測法,當連測時方向數超過三時,應進行歸零。

表3 豎角測量

表4 距離測量

表5 監測點精度要求 mm
4.4 監測數據處理及結果輸出
自動化監測數據均由計算機進行處理與管理,當取得各種監測數據后,能及時進行處理,繪制各種類型的表格及曲線圖,計算變形量,評估結構物的安全性,確定工程技術措施。自動化監測將所有監測數據傳輸至遠程云計算中心,遠程云計算中心可將海量監測數據進行整理計算分析,并將分析結果以云平臺的形式展現給用戶。
5 實驗結果及分析
本次監測獲得一個周期7 d的沉降量同首期對比分析,通過監測系統后臺自動處理,監測成果分析見表6。
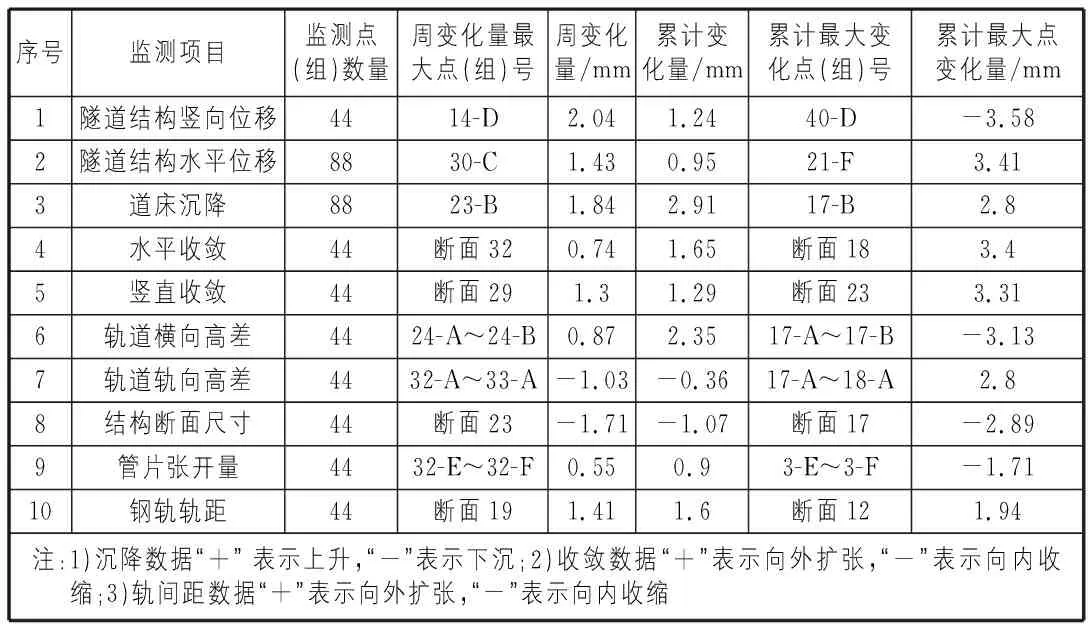
表6 一個周期內的沉降量與首期對比分析
由表6可知,對一個周期內10個監測項目的數據進行統計分析,盾構區間結構整體穩定,本次各監測項目最大周變化量2.04 mm,累計最大變化量-3.58 mm,沒有出現異常情況。
6 結語
結合項目實施的情況,驗證了采取自動化監測方案的可行性,達到預期的效果。全部采用網絡數字化,避免人為誤差,減輕了勞動強度,達到了快速處理數據并反饋結果。預測結構物的安全性,及時反饋指導施工,調整施工參數,達到安全、快速、高效施工之目的。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
電測與儀表(2016年9期)2016-04-12 00:29:52
