基于人工魚群算法的兩輪機器人運動控制研究
2021-03-29 00:27:16譚志銀
荊楚理工學院學報 2021年3期
譚志銀

摘要:為了降低機器人實際運動位置與目標位置跟蹤誤差,設計了徑向基函數(shù)(Radial Basis Function, RBF)神經(jīng)網(wǎng)絡控制器。利用人工魚群算法迭代搜索最優(yōu)值原理對RBF神經(jīng)網(wǎng)絡控制器進行優(yōu)化,將優(yōu)化后的控制器用于兩輪機器人控制系統(tǒng)中,并給出了兩輪機器人誤差控制方程式。同時采用MATLAB軟件對兩輪機器人的控制系統(tǒng)進行仿真,對比分析優(yōu)化前和優(yōu)化后輸出誤差變化范圍。結果表明:優(yōu)化后兩輪機器人在向目標位置移動時產(chǎn)生的誤差變化幅度范圍較小。利用人工魚群算法優(yōu)化RBF神經(jīng)網(wǎng)絡控制器,能夠提高控制器的反應速度,降低兩輪機器人跟蹤目標產(chǎn)生的誤差。
關鍵詞:兩輪機器人;RBF神經(jīng)網(wǎng)絡控制器;人工魚群算法;優(yōu)化;仿真
中圖分類號:TH112? ? ? 文獻標志碼:A? ? ? 文章編號:1008-4657(2021)03-0074-05
引言
隨著智能化時代的到來,各式各樣的機器人也隨之而來。其中,仿人機器人研究較多,主要包括雙足行走式和輪式兩種方式。目前常見的輪式機器人有兩輪、三輪和四輪式。輪子越多,行駛相對更加穩(wěn)定,但是約束過多,結構也相對復雜。兩輪機器人具有結構簡單、運動靈活,可以在空間較小的范圍內(nèi)執(zhí)行復雜任務[ 1-2 ]。面對外界各種不確定因素,兩輪機器人移動過程中,其控制精度格外重要。因此,必須加快我國機器人控制領域的研究,更好的適應各種復雜環(huán)境。
兩輪機器人控制系統(tǒng)一直是研究的熱點問題,為了使機器人更好的為社會服務,對機器人控制系統(tǒng)展開了研究。文獻[ 3-4 ]研究兩輪平衡機器人PID控制系統(tǒng),分析了兩輪機器人斜坡簡圖,構造機器人動力學方程式。設計PID控制系統(tǒng),通過仿真驗證控制系統(tǒng)的穩(wěn)定性,提高了機器人運動的穩(wěn)定性。文獻[ 5-6 ]研究了兩輪機器人神經(jīng)網(wǎng)絡補償控制系統(tǒng),設計了兩輪機器人結構示意圖,引用了BP神經(jīng)網(wǎng)絡控制系統(tǒng),利用神經(jīng)網(wǎng)絡算法逼近方法提高機器人運動精度,在不同工況條件下對機器人補償效果進行仿真驗證,提高了機器人檢測精度。文獻[ 7 ]研究了兩輪機器人模糊PID控制系統(tǒng),給出了模糊理論控制算法,引用PID控制系統(tǒng),給出了模糊自適應PID控制流程,通過仿真對兩輪機器人進行驗證,證明了控制系統(tǒng)的有效性。以前研究的機器人控制系統(tǒng),從在某種程度上說,提高了機器人運動軌跡跟蹤精度。但是,隨著智能化產(chǎn)業(yè)的發(fā)展,對機器人位置精度的要求也變得越來越苛刻,需要不斷的追求高精度控制系統(tǒng)。對此,本文創(chuàng)建了兩輪機器人二維模型簡圖,定義了機器人在向目標位置移動產(chǎn)生的誤差方程式,給出了機器人運動路徑最短表達式。同時設計了兩輪機器人RBF神經(jīng)網(wǎng)絡控制器,利用人工魚群算法迭代搜索全局最優(yōu)值原理對控制器進行優(yōu)化。通過仿真曲線比較優(yōu)化前和優(yōu)化后的誤差變化范圍,為兩輪機器人控制系的研究提供參考。
1? ? ? ? 兩輪機器人
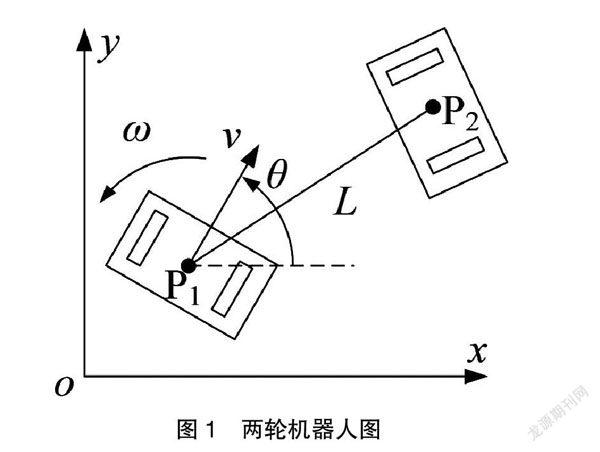
在直角坐標系中,建立兩輪機器人運動簡圖,如圖1所示。
在圖1,O-xy為直角坐標系,機器人起點位置為P1點,終點位置為P2點,機器人移動位移為L。機器人通過調(diào)整自轉角度θ和移動速度v從起點位置向終點位置移動。
兩輪機器人向目標移動過程中,其速度和角速度[ 8 ]定義為
式中:x、y分別為坐標系橫向、縱向位置;ω為兩輪機器人自轉角速度。
兩輪機器人向目標方向運動時,其運動位移誤差定義為
式中:s為期望運動位移;sd為實際運動位移。
若要降低兩輪機器人運動位移誤差,必須使機器人運動路徑最短,其表達式為
式中:(xi,yi)為起點位置;(xj,yj)為終點位置。
2? ?改進RBF神經(jīng)網(wǎng)絡控制
2.1? ?人工魚群算法
采用人工魚群算法,其人工魚個體位置[ 9-10 ]為
式中:Xi為個體尋優(yōu)變量。
在人工魚所在位置處,其食物濃度定義為
式中:f(X)為適應度函數(shù)。
不同人工魚個體相距位置定義為
人工魚群算法搜索過程包括以下部分[ 9-10 ]:
1)覓食行為,其狀態(tài)定義為
式中:V為人工魚的視野范圍;V為區(qū)間[-1,1]之間隨機數(shù)。
如果Xj位置食物濃度高于Xi,則人工魚就會向Xj位置移動一步,即為覓食行為,如下所示
式中:s為移動步長;t為迭代次數(shù)。
2)聚群行為,在人工魚為Xi位置時,d 如果XC位置適應度較好,則向XC位置聚集,否則繼續(xù)覓食,如下所示 3)追尾行為,尋找視野區(qū)間中優(yōu)秀個體,若Xj位置適應度較好,并且不太擁擠,則向其Xj處移動,否則繼續(xù)覓食,如下所示 4)隨機行為,當?shù)螖?shù)達到最大值,仍然沒有搜索到最優(yōu)值,就會產(chǎn)生隨機行為,如下所示 采用人工魚群算法流程圖如圖2所示。 2.2? ?RBF控制器優(yōu)化 RBF神經(jīng)網(wǎng)絡采用多輸入單輸出的網(wǎng)絡結構,能夠逼近任意連續(xù)的函數(shù),具有較好的控制效果。RBF神經(jīng)網(wǎng)絡采取的函數(shù)為高斯基函數(shù)[ 11 ],如下所示 式中:x = [x1,x2,…,xn]T為輸入向量;cj = [cj1,cj2,…,cjn]為中心矢量;bj為基寬度參數(shù)。 在RBF神經(jīng)網(wǎng)絡控制器中,其權向量定義為 控制器網(wǎng)絡輸出函數(shù)[ 11 ]定義為 兩輪機器人控制目標函數(shù)可以定義為 采用梯度下降法[ 11 ],不同參數(shù)迭代算法定義為: 式中:α為動量變化因子;η為學習速率。 采用人工魚群算法對RBF神經(jīng)網(wǎng)絡控制器進行優(yōu)化,將優(yōu)化后的控制器用于兩輪機器人中,其優(yōu)化控制流程如圖3所示。 3? ?仿真與分析 為了驗證兩輪機器人優(yōu)化后的控制效果,進行仿真實驗,比較優(yōu)化前和優(yōu)化后的機器人運動誤差,從而體現(xiàn)出人工魚群算法優(yōu)化后的優(yōu)越性。假設兩輪機器人起始位置坐標為(0,0),終點位置坐標為(1000,1000)。在相同環(huán)境中,橫向跟蹤誤差如圖4所示,縱向跟蹤誤差如圖5所示。 根據(jù)圖4可知,優(yōu)化前,兩輪機器人橫向輸出誤差范圍在-3 mm至3 mm之間,變化幅度較大。優(yōu)化后,兩輪機器人橫向輸出誤差范圍在-2 mm至2 mm之間,變化幅度較小。 根據(jù)圖5可知,優(yōu)化前,兩輪機器人縱向輸出誤差范圍在-3 mm至3 mm之間,變化幅度較大。優(yōu)化后,兩輪機器人縱向輸出誤差范圍在-2 mm至2 mm之間,變化幅度較小。 對比優(yōu)化前和優(yōu)化后的兩輪機器人控制效果,優(yōu)化后輸出誤差明顯低于優(yōu)化前。優(yōu)化前的RBF神經(jīng)網(wǎng)絡控制器,機器人橫向和縱向輸出誤差相差不大;優(yōu)化后的RBF神經(jīng)網(wǎng)絡控制器,機器人橫向和縱向輸出誤差相差不大。但是RBF神經(jīng)網(wǎng)絡控制器采用人工魚群算法優(yōu)化后,控制精度得到了提高,優(yōu)勢相對明顯。因此,采用人工魚群算法優(yōu)化RBF神經(jīng)網(wǎng)絡控制器,可以使兩輪機器人定位更加精確,適合機器人高精度移動的場合。 4? ?結語 針對兩輪機器人跟蹤誤差較大問題,設計了RBF神經(jīng)網(wǎng)絡控制器,采取人工魚群算法對控制器進行優(yōu)化,將優(yōu)化后的控制器進行仿真驗證。實驗結果表明:優(yōu)化前,兩輪機器人橫向和縱向跟蹤誤差在-3 mm至3 mm之間,優(yōu)化后,兩輪機器人橫向和縱向跟蹤誤差在-2 mm至2 mm之間。優(yōu)化后,兩輪機器人運動軌跡跟蹤誤差降低了,證明了人工魚群算法具有較好的搜索功能,能夠提高兩輪機器人運動精度,為后期從事兩輪機器人研究人員提供參考方法。 參考文獻: [1] 陶言侃.雙輪自平衡機器人設計及軌跡跟蹤控制研究[D].哈爾濱:哈爾濱工業(yè)大學,2019. [2] 李巧藝.酒店服務機器人結構設計與運動控制研究[D].成都:西南交通大學,2017. [3] 閆輝,賈彥茹,董建軍.一種兩輪自平衡機器人比例-積分-微分控制方法[J].自動化技術與應用,2021,40(3):6-10. [4] Carlucho I, Paula M D, Villar S, et al. Incremental q-learning strategy for adaptive pid control of mobile robots[J].Expert Systems With Applications, 2017,80:183-199. [5] 黎小巨,殷素峰,陳洵凜,等.兩輪自平衡機器人姿態(tài)誤差的神經(jīng)網(wǎng)絡補償研究[J].機床與液壓,2020,48(15):44-49. [6] Hoang N B, Kang H J. Neural network-based adaptive tracking control of mobile robots in the presence of wheel slip and external disturbance force[J].Neurocomputing,2016,188:12-22. [7] 夏國清,陳華珍.模糊理論和PID相融合的兩輪自平衡機器人智能控制系統(tǒng)[J].現(xiàn)代電子技術,2018,41(21):117-120. [8] Begnini M, Bertol D W, Martins N A. A robust adaptive fuzzy variable structure tracking control for the wheeled mobile robot: simulation and experimental results[J].Control Engineering Practice, 2017,64: 27-43. [9] 姚正華.改進人工魚群智能優(yōu)化算法及其應用研究[D].徐州:中國礦業(yè)大學,2016. [10] Costa F P M, Rocha M A C A, Fernandes M G P E. An artificial fish swarm algorithm based hyperbolic augmented lagrangian method[J].Journal of Computational and Applied Mathematics, 2014,259:868-876. [11] 申愛民,賀嚴松.用于車輛非線性液壓懸架的徑向基函數(shù)神經(jīng)網(wǎng)絡控制優(yōu)化與仿真[J].中國工程機械學報,2020,18(2):148-152. [責任編輯:鄭筆耕]
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
科技資訊(2016年18期)2016-11-15 20:09:22
數(shù)字技術與應用(2016年9期)2016-11-09 23:25:33
數(shù)字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49