基于矩化GO法的某型電動飛機擾流板系統可靠性
2021-03-27 04:47:14李景奎汪英王博民
航空學報 2021年3期
李景奎,汪英,王博民
沈陽航空航天大學 民用航空學院,沈陽 110136
新能源電動飛機[1]的成功研制,標志著中國航空器研發正在向低能耗、低污染方向發展。國外對電動飛機也展開了大量的研究[2-3]。擾流板系統[4-5]對于電動飛機的機動性能影響較大,其主要功能是協助飛機完成滾轉動作,在飛機中斷起飛或著陸過程中,擾流板作為減速板使用,可以增大飛機阻力并減少升力。所以擾流板系統可靠性對于電動飛機的安全性至關重要。
GO法[6](Goal-Oriented method)是一種有效的系統可靠性分析方法,尤其適用于有序列、多信號、多狀態[7]的系統可靠性分析。GO法能夠有效避免系統可靠性故障樹分析中建模困難等問題,被廣泛應用于系統可靠性研究[8-9]。馬駿等[10]以GO法為基礎分析飛機液壓系統的可靠性。王海朋等[11]將GO法與模糊數學結合對導航系統進行可靠性分析。黃濤等[12]將GO法應用在壓水堆凈化系統,給出了常用6種操作符在SIMULINK的仿真模塊。江秀紅等[13]將狀態概率矩陣應用到GO法當中,提高了GO運算的效率。張麗娜等[14]以模糊GO法分析飛機備件支援系統可靠度。李玉峰和寧昭義[15]將狀態概率矩陣與SIMULINK仿真技術結合,研究了電動飛機電推進系統的可靠性,取得了良好的效果。
本文給出操作符11在SIMULINK中的運算模塊,解決擾流板冗余系統的可靠度計算問題。同時,為了解決傳統GO法在并聯系統可靠性分析中存在的建模復雜等問題,提出一種矩化操作符,給出運算流程,可有效減少GO法在并聯系統中建模的工作量,提高工作效率。最后,通過故障樹分析法對計算結果進行了驗證。
1 某型電動飛機擾流板系統建模
1.1 模型建立
某型電動飛機擾流板系統結構原理圖如圖1所示,其工作原理為:主駕駛和副駕駛分別為主輸入端,駕駛員對副翼感覺/定中組件提供機械輸入,組件驅動副翼PCU(動力控制組件),通過擾流板混合器和比率變換器帶動鋼索,向擾流板作動筒發出機械信號,使機翼兩側共8個擾流板工作(每個擾流板獨立工作,且一側有2個擾流板正常工作時可保證飛行安全)。操縱臺上的副翼/方向舵配平面板和減速板手柄作為次輸入,依次通過作動筒、傳感器控制擾流板收放,以控制飛機中斷起飛、空中翻滾及落地減速等工作。以上信號流最終輸入至FDAU(飛行數據采集組件)。系統GO圖如圖2所示。
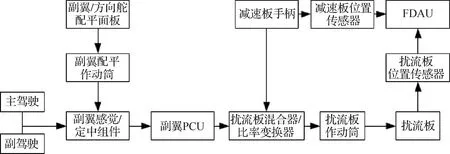
圖1 擾流板系統原理圖Fig.1 Structure diagram of spoiler system

圖2 擾流板系統GO圖Fig.2 GO diagram of spoiler system
1.2 定性GO分析
根據系統工作原理,主駕駛、副駕駛、副翼/方向舵配平面板和減速板手柄作為信號輸入,均以操作符5模擬,副翼感覺/定中組件、擾流板混合器和比率變換器屬于有信號導通元件,使用操作符6模擬。由于機翼兩側各有4個擾流板獨立工作,且每4個擾流板中至少有2個擾流板正常工作及判定系統正常,故將每側擾流板組后接操作符11模擬M取K門的情況。擾流板作動筒及副翼配平作動筒有提前狀態(漏油值2)和故障狀態(卡阻值3),以操作符3模擬,其余均為兩狀態單元。具體操作符信息見表1所示。其中,各個元件的狀態值通過試驗、數值計算獲得。
通過MATLAB和SIMULINK搭建GO運算平臺,已有常用操作符的SIMULINK計算模塊詳見文獻[12]。本文給出操作符11(M取K門)的SIMULINK計算模塊。

表1 功能操作符數據信息Table 1 Data information of functional operators
1.3 M取K門的模塊結構
M取K門經常表示冗余系統,有M個輸入信號,1個輸出信號,表示輸入和輸出的邏輯關系。包含時序問題和兩狀態問題。在兩狀態問題中,M個輸入中至少有K個成功,輸出才成功。某型電動飛機擾流板系統中M取K門以兩狀態問題計算。擾流板系統要求機翼兩側各有4個擾流板,每個支路獨立工作,單翼向4個擾流板保證有2個以上正常工作可使飛機保證正常工作狀態。每個擾流板工作原理相同且正常狀態概率相同,根據排列組合關系,可確定系統成功概率數學表達式如下:
(1)
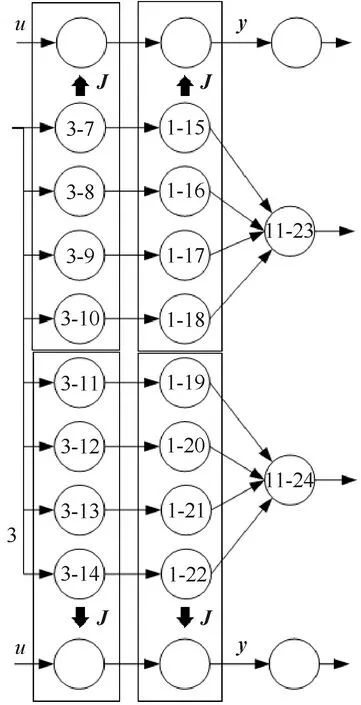
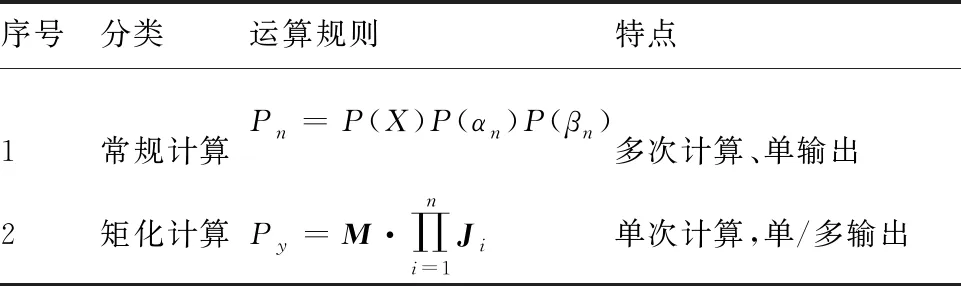
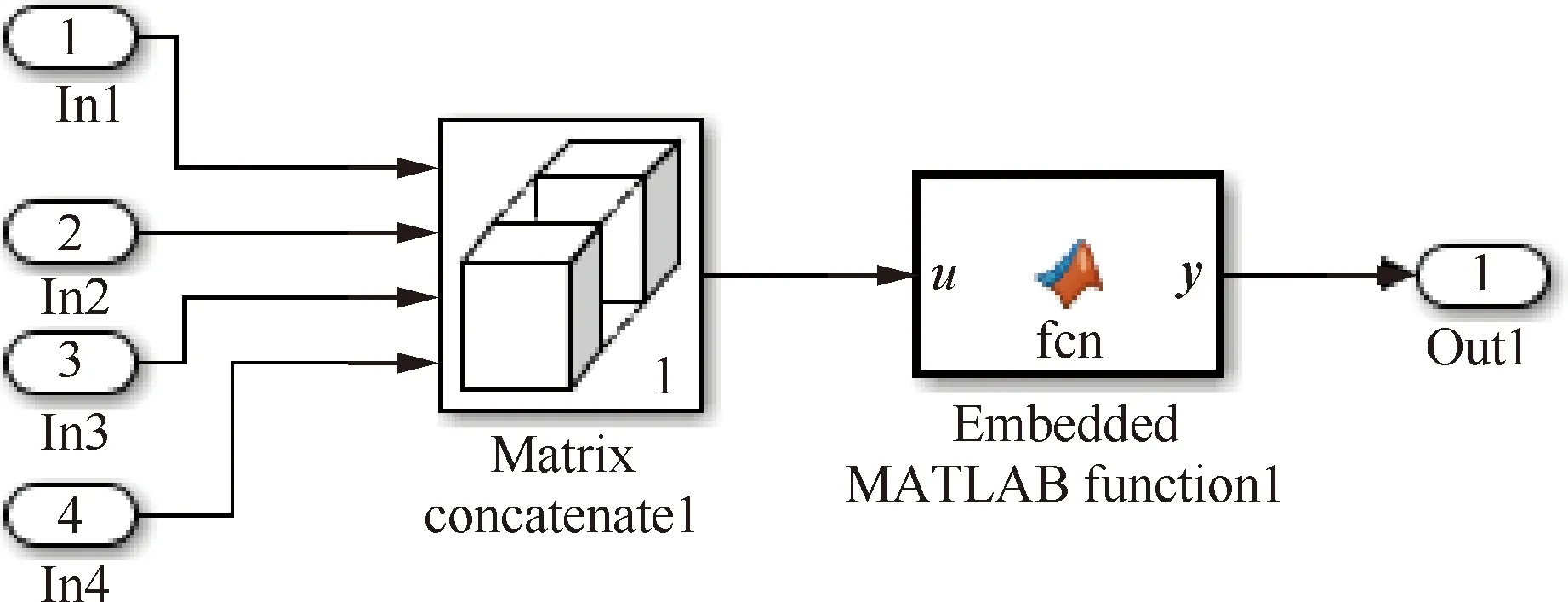
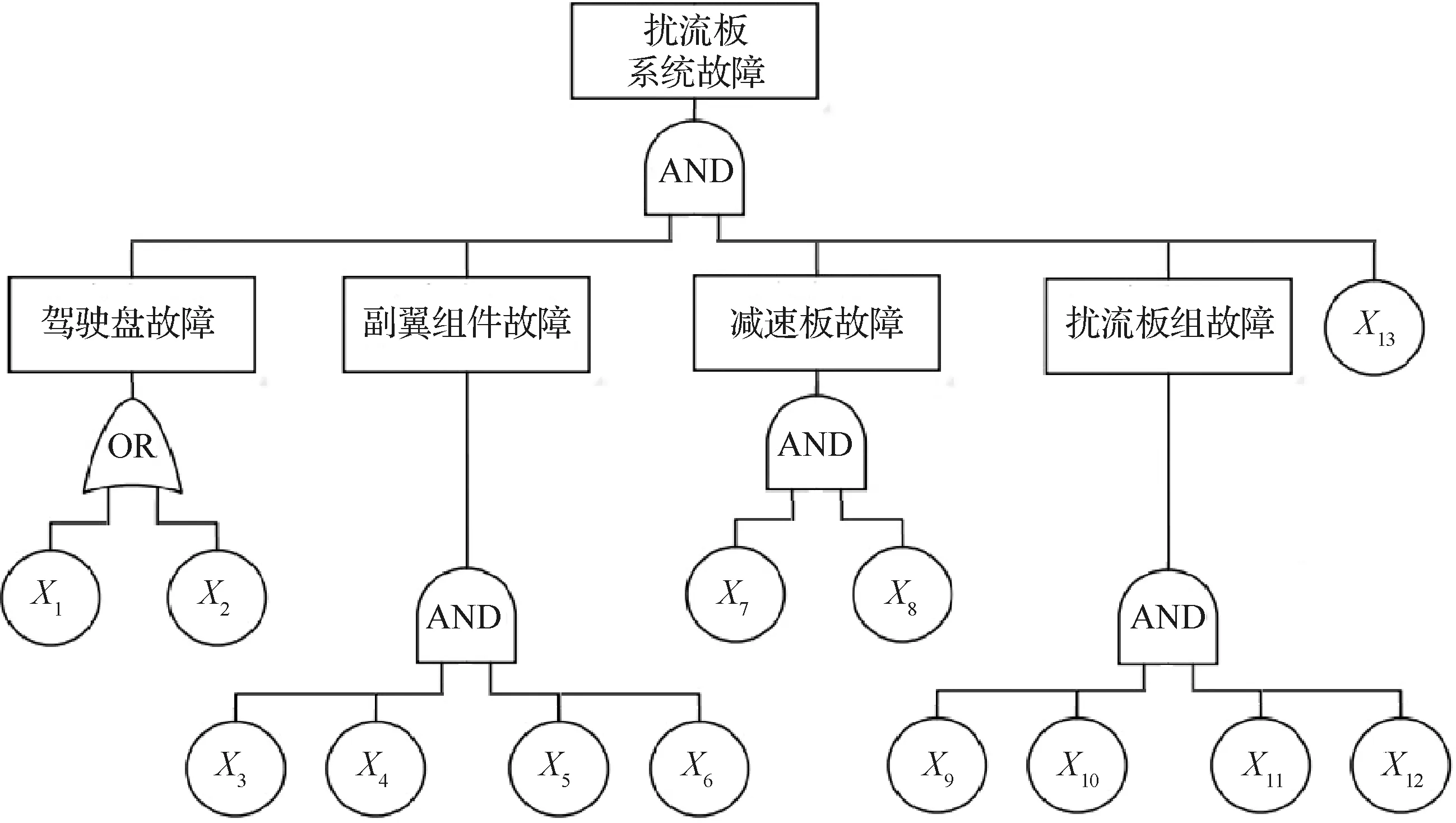
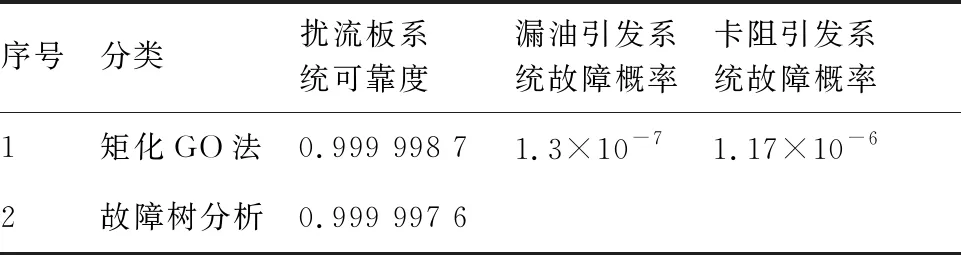
式中:n 擾流板冗余系統M取K門共有4個輸入端,分別模擬單側機翼4個擾流板,當m=4、n=2時表達式為 (2) 數學表達式分為3個部分相加,各部分運算模塊封裝在子系統中,當m或者n發生變化時,只需增加信號輸入的個數,在子系統中增添需要的運算模塊即可。 圖3 M取K門的SIMULINK模塊化表達Fig.3 SIMULINK module expression of M/K 根據系統GO圖,使用SIMULINK進行系統建模。各操作符以模塊表示,設計出如圖4所示的電動飛機擾流板系統可靠性分析仿真界面。 由SIMULINK仿真界面可以看出,模塊3-7至1-22為擾流板冗余系統(并聯系統),工作原理較為簡單但是建模繁瑣、工作量大。研究學者針對此問題給出了多種解決方案[16-18]。本文提出一種矩化操作符,可將并聯系統在GO法建模時簡化處理,降低建模工作量,提高工作效率。 圖4 擾流板系統可靠性分析仿真界面Fig.4 Simulation interface for reliability analysis of spoiler system 傳統GO運算對擾流板系統可靠性分析時,8條支路各需計算一次,設信號輸入成功概率為P(X),擾流板作動筒成功概率為P(αl),擾流板成功概率為P(βl),則第l路的成功概率Pn為 Pn=P(X)P(αl)P(βl) (3) 本文基于GO法的基本運算規則,將矩陣運算與傳統GO運算結合,在同一系統中存在標量運算與矩陣運算,可使系統可靠性分析建模簡化,計算準確。 定義矩化操作符:信號輸入為一標量,可將輸入信號組成l×l矩陣。l為信號輸入數量,u為信號輸入值,y為信號輸出,定義矩化矩陣Ji由SIMULINK中的MATLAB fuction模塊編輯,矩化流程如圖5所示。 矩化操作符可將8個支路進行矩化,原理圖如圖6所示,可用矩化操作符Ji表示各支路相同工作原理的元件,降低建模工作量。 信號輸入u為一標量,矩化操作符將輸入信號u矩化為4×4的對角陣T,同時將自身所代表的4個兩狀態單元數據以矩陣形式同輸入信號運算,其具體計算表達式如下: 圖5 矩化流程圖Fig.5 Matrix flowchart 圖6 矩化原理圖Fig.6 Matrix schematic (4) (5) (6) (7) 式中:Py為信號流輸出;a7~a10、a15~a18分別為操作符7~10、15~18所代表的擾流板作動筒的成功概率。按照信號流順序依次進行計算,輸出矩陣y。當下一操作符不再是矩化操作符時,則需輸出標量y,如操作符15~18下一操作符為M取K門操作符,需要輸出4個信號,根據矩陣運算,取對角線運算結果u·a7·a15等4個標量,作為信號輸出傳遞給M取K門操作符,結束矩化。矩化方法與傳統GO法的運算規則、方法特點如表2所示。 矩化操作符的優點在于可節省繪制GO圖的時間,并且能將復雜的GO圖并聯系統簡化,使GO圖更加簡潔、直觀。同時,在GO運算中可隨時將標量運算和矩陣運算互相轉化,在計算原理上更直觀,矩化后的擾流板系統GO圖如圖7所示。 表2 方法對比Table 2 Method comparison 由圖7可以看出,使用矩化操作符創建的GO圖相比較于傳統GO圖(如圖2所示)更為簡潔,建模工作量降低。同時,根據矩化后的GO圖設計SIMULINK仿真界面更為清晰,將傳統GO法操作符運算模塊以MATLAB fuction模塊編輯,更變為矩化操作符的運算規則,具體表達如圖8 所示。 圖7 矩化后的GO圖Fig.7 Matrix GO graph 圖8 矩化操作符的SIMULINK模塊化表達Fig.8 Modular representation of matrix operators by SIMULINK 根據圖7建立矩化后的GO圖SIMULINK仿真界面,如圖9所示。 圖9 矩化GO法的SIMULINK仿真界面Fig.9 SIMULINK simulation interface for matrix GO method 各操作符的賦值由表1中給出,設定系統工作時間為10 s。結果顯示,以矩化GO法得出電動飛機擾流板系統的總成功概率為0.999 998 7。 利用故障樹分析法對擾流板系統可靠性進行驗證。故障樹分析法發展于20世紀60年代,是一種安全可靠的分析技術,是目前故障診斷最常用的方法之一,作為成熟的可靠性分析技術被廣泛應用于各行領域[19-20]。 對擾流板系統進行失效分析,根據擾流板系統各組件的使用環境、特點以及自身性能,共得到4個中間事件和13個底事件,建立某型電動飛機擾流板系統故障樹,如圖10所示。 圖10 某型電動飛機擾流板系統故障樹Fig.10 Fault tree of spoiler system of certain electric aircraft 通過故障樹分析,對擾流板系統進行建樹并賦值,確定故障樹的最小割集分別為:(X1×X3×X4×X5×X6×X7×X8×X9×X10×X11×X12×X13),(X2×X3×X4×X5×X6×X7×X8×X9×X10×X11×X12×X13)。X1:駕駛盤1故障,X3:副翼/方向舵面板故障,X4:副翼作動筒故障,X5:副翼感覺定中組件故障,X6:副翼PCU故障,X7:減速板手柄故障,X8:傳感器故障,X9:混合器/比率變換器故障,X10:作動筒故障,X11:擾流板傳感器故障,X12:擾流板故障,X13:FDAU故障。故障樹計算得到擾流板系統可靠度為0.999 997 6。計算結果與矩化GO法對比如表3所示。 表3 結果對比Table 3 Result comparison 可以看出,矩化GO法得到的擾流板系統可靠度計算結果與故障樹分析法計算結果十分接近。與故障樹分析相比,矩化GO法更適合多態系統的可靠性分析,對擾流板系統的可靠性分析更為準確,證明使用矩化GO法對電動飛機擾流板系統進行可靠性分析是可行的。 1) 給出GO法第11號操作符M取K門在SIMULINK中的模塊化表達,可完成實際工程中冗余系統的GO法計算。 2) 提出矩化操作符的概念,給出矩化操作符運算規則,可將并聯系統部分GO圖簡化。以SIMULINK設計矩化GO圖仿真界面,進行電動飛機擾流板系統可靠性分析。通過與故障樹分析法對比,證明了矩化GO法在可靠性分析中的合理性,為電動飛機系統可靠性分析提供新的思路。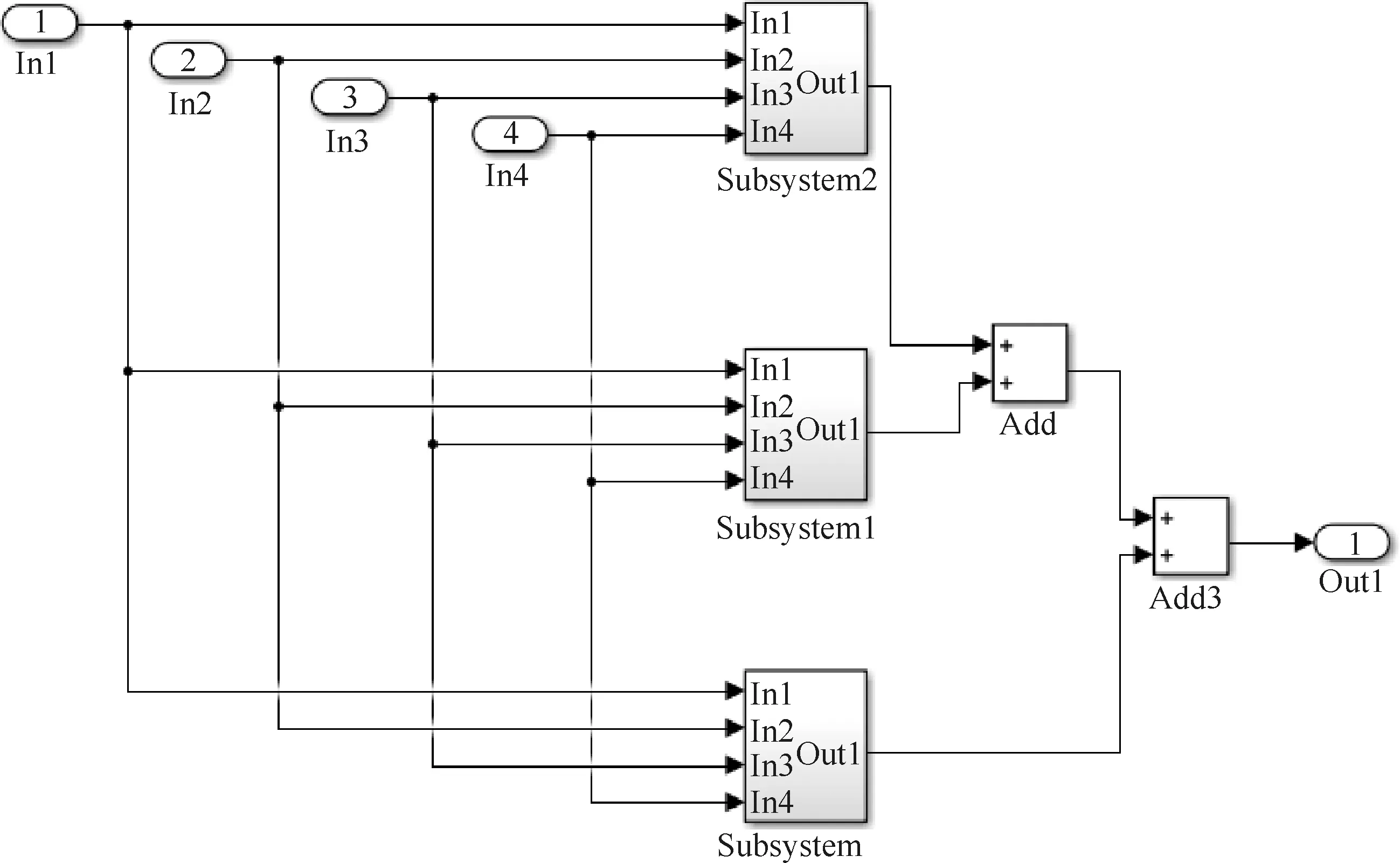
2 矩化操作符在擾流板系統中的應用
2.1 矩化操作符的提出

2.2 矩化操作符的應用



3 電動飛機擾流板系統可靠性分析與驗證
3.1 擾流板系統可靠性計算

3.2 擾流板系統可靠性驗證
4 結 論
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
當代陜西(2019年11期)2019-06-24 03:40:28
電子制作(2018年11期)2018-08-04 03:25:42
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25