大跨域條件下的自適應(yīng)滾轉(zhuǎn)穩(wěn)定容錯控制方法
2021-03-27 02:20:04王雨辰林德福王偉紀(jì)毅
航空學(xué)報 2021年3期
王雨辰,林德福,王偉,*,紀(jì)毅
1. 北京理工大學(xué) 宇航學(xué)院,北京 100081 2. 無人機自主控制技術(shù)北京重點實驗室,北京 100081
彈體滾轉(zhuǎn)引起的初始偏差角度影響彈藥加速度指令的響應(yīng)速度,彈藥制導(dǎo)精度,甚至引起脫靶。當(dāng)彈藥執(zhí)行大跨域飛行任務(wù)時,其飛行包絡(luò)顯著增大, 飛行速度、動壓、攻角等實時大范圍波動,氣動擾動參數(shù)高頻抖振,對彈藥滾轉(zhuǎn)通道的穩(wěn)定性造成惡劣影響[1,2]。傳統(tǒng)的滾轉(zhuǎn)穩(wěn)定控制設(shè)計基于經(jīng)典控制理論,忽略模型中非線性項和不確定項,設(shè)計快速響應(yīng)的滾轉(zhuǎn)通道自動駕駛儀。Arrow和Williams[3]忽略系統(tǒng)的交叉耦合,針對滾轉(zhuǎn)通道的線性模型設(shè)計了一種含有協(xié)調(diào)支路的自動駕駛儀。Kovach等[4]忽略三通道間的耦合,利用頻率法和根軌跡法設(shè)計三通道自動駕駛儀,設(shè)計的駕駛儀響應(yīng)迅速,能夠快速跟蹤控制指令。然而,采用古典控制方法需要進行大量的增益調(diào)度以克服氣動參數(shù)的大幅度變化,控制方法繁瑣,控制效率較低,難以適應(yīng)大跨域環(huán)境。因此,亟需設(shè)計具有強魯棒性的滾轉(zhuǎn)通道控制方法。
隨著控制理論的發(fā)展,現(xiàn)代控制方法逐漸被應(yīng)用在自動駕駛儀的設(shè)計中[5],Williams和Friedland[6]提出了一種基于狀態(tài)空間技術(shù)的線性二次高斯(LGQ)法,將滾轉(zhuǎn)通道解耦到一個獨立子系統(tǒng),并在一定工作區(qū)間對模型進行線性化,完成自動駕駛儀的設(shè)計。彭博等[7]針對滾轉(zhuǎn)彈耦合和傳統(tǒng)增益調(diào)度設(shè)計中的缺陷,設(shè)計了一種基于BP神經(jīng)網(wǎng)絡(luò)的自適應(yīng)調(diào)度算法,增強解耦效果,解決滾轉(zhuǎn)彈藥大空域飛行中的控制參數(shù)調(diào)度問題。Jin和Chwa[8]基于尾翼控制的彈藥模型,提出了一種自適應(yīng)的線性反饋控制方法。Rezazadeh等[9]提出了側(cè)滑轉(zhuǎn)彎(STT)控制彈藥的滾轉(zhuǎn)通道模型,并通過不確定性與擾動估計器(UDE)算法實時估計模型中的非線性時變氣動參數(shù),利用極點配置法設(shè)計了一種魯棒解耦滾轉(zhuǎn)駕駛儀。近年來,滑模變結(jié)構(gòu)控制理論由于其顯著的魯棒性而得到重視并廣泛應(yīng)用于彈藥控制系統(tǒng)的設(shè)計中。Shima等[10]將滑模控制理論應(yīng)用到制導(dǎo)控制一體化系統(tǒng)設(shè)計中。Awad和Wang[11]基于擴張狀態(tài)觀測器,設(shè)計了一種終端滑模三通道穩(wěn)定駕駛儀,補償了氣動參數(shù)非線性變化在整個飛行過程中的影響。王偉等[12]利用二階滑模理論設(shè)計了一種強魯棒性的滾轉(zhuǎn)穩(wěn)定控制器,控制彈藥快速達到期望的滾轉(zhuǎn)角速度,并進一步提出了一種基于super-twisiting算法的滾轉(zhuǎn)穩(wěn)定控制器,在控制滾轉(zhuǎn)角速度快速收斂的同時抑制抖振。沈毅等[13]針對激光制導(dǎo)炸彈滾轉(zhuǎn)控制通道的時變特性,通過狀態(tài)反饋改善彈體動態(tài)特性,并在此基礎(chǔ)上設(shè)計一種滑模變結(jié)構(gòu)控制器,但對外部擾動的估計不足。
在工程實踐中,積累性誤差、突發(fā)性錯誤與指令飽和等執(zhí)行機構(gòu)失效情形時有發(fā)生,造成滾轉(zhuǎn)失速失穩(wěn)等不利影響,降低了執(zhí)行機構(gòu)的效率,甚至引發(fā)脫靶。為了提升彈藥滾轉(zhuǎn)通道的品質(zhì)和可靠性,需要針對執(zhí)行機構(gòu)動力學(xué)與失效特性,對滾轉(zhuǎn)通道進行容錯控制設(shè)計。Xu等[14]基于帶偏置項的Lyapunov函數(shù)設(shè)計了一種自適應(yīng)控制算法,并通過反步法補償未知執(zhí)行機構(gòu)失效。He和Lin[15]將執(zhí)行機構(gòu)失效視為模型不確定性,并通過設(shè)計滑模控制律控制視線角快速收斂,實現(xiàn)目標(biāo)攔截。Wang等[16]通過假設(shè)執(zhí)行機構(gòu)失效為未知有界擾動,并設(shè)計狀態(tài)擴張觀測器(ESO)對擾動進行估計,通過反步設(shè)計實現(xiàn)三維制導(dǎo)控制一體化設(shè)計。Li等[17]通過狀態(tài)觀測器觀測執(zhí)行機構(gòu)故障失效程度,建立容錯控制器,提高彈藥的魯棒性。此外,執(zhí)行機構(gòu)的高階動力學(xué)滯后特性是影響滾轉(zhuǎn)通道響應(yīng)速度的另一個重要因素,受到氣動力及彈藥自身硬件設(shè)備等因素的影響,彈藥實際運動和控制指令之間存在一定延遲。因此,有必要在控制方法的設(shè)計中加入對彈藥執(zhí)行機構(gòu)動力學(xué)滯后的補償。Trivedi等[18]在考慮滾轉(zhuǎn)通道二階模型的同時,引入執(zhí)行機構(gòu)動力學(xué)滯后模型并考慮執(zhí)行機構(gòu)的輸入飽和約束,通過滑模理論和反步設(shè)計補償系統(tǒng)滯后,實現(xiàn)滾轉(zhuǎn)通道快速響應(yīng)和彈藥的大攻角飛行。
受上述文獻的啟發(fā),本文面向大跨域飛行條件下的制導(dǎo)彈藥,針對其滾轉(zhuǎn)通道中存在的非線性項和不確定項,以及執(zhí)行機構(gòu)故障失效問題,設(shè)計了一種自適應(yīng)滑模變結(jié)構(gòu)滾轉(zhuǎn)穩(wěn)定容錯控制方法,相較于傳統(tǒng)線性控制理論,本文提出方法能夠有效控制滾轉(zhuǎn)角和滾轉(zhuǎn)角速度收斂到零,對氣動非線性和不確定項具有強魯棒性,提高制導(dǎo)彈藥大跨域高攻角飛行的穩(wěn)定性,并為提高末制導(dǎo)控制能力提供重要基礎(chǔ)。另外,考慮執(zhí)行機構(gòu)失效現(xiàn)象,所設(shè)計控制方法能夠補償執(zhí)行機構(gòu)故障失效,提高控制可靠性。為了使設(shè)計更接近工程實際,本文進一步考慮執(zhí)行機構(gòu)動力學(xué)特性,采用反步設(shè)計(backstepping),在滑模控制方法的基礎(chǔ)上設(shè)計一種反步控制方法,補償執(zhí)行機構(gòu)動力學(xué)滯后對控制精度的影響。仿真實驗表明,所設(shè)計控制方法具有強魯棒性、快速性和有效性。
1 考慮執(zhí)行機構(gòu)故障的滾轉(zhuǎn)通道動力學(xué)模型
彈藥滾轉(zhuǎn)通道動力學(xué)模型采用微分方程的形式可表示為
(1)


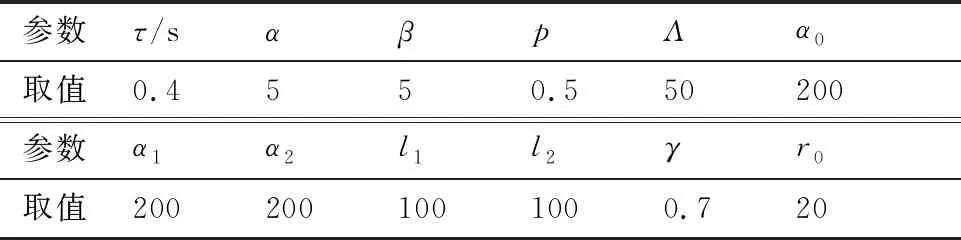
表1 參數(shù)定義及取值Table 1 Description and values of parameters
受文獻[20]啟發(fā),本文提出一種基于參數(shù)自適應(yīng)的滑模控制方法旨在解決大跨域、大攻角及機動飛行條件下,氣動擾動參數(shù)劇烈變化,滾轉(zhuǎn)通道的控制問題。另外,本文在后續(xù)章節(jié)考慮執(zhí)行機構(gòu)故障以及執(zhí)行機構(gòu)動力學(xué)滯后特性,得到基于參數(shù)自適應(yīng)的反步控制方法。
考慮到執(zhí)行機構(gòu)故障失效現(xiàn)象,可以將舵偏角表示為
δa=fv+Δδ
(2)
式中:0.3≤f≤1為執(zhí)行機構(gòu)的故障失效系數(shù);v為待設(shè)計控制方法;Δδ為模型誤差。當(dāng)f=1、Δδ=0時,表示未發(fā)生執(zhí)行機構(gòu)故障失效。定義u=δa,并引入執(zhí)行機構(gòu)失效模型(2),得到
u=fv+Δδ
(3)
(4)
式中:d2=Kαsin4x1+Δδ+d1。

至此,考慮執(zhí)行機構(gòu)失效的滾轉(zhuǎn)通道控制模型建立完畢。
2 自適應(yīng)容錯控制方法設(shè)計
針對系統(tǒng)(4)設(shè)計滾轉(zhuǎn)控制指令v。滑模控制方法設(shè)計包括滑模面的設(shè)計和趨近率的設(shè)計。考慮到快速終端滑模(FTSM)具有強魯棒性,高精度和快速收斂的優(yōu)點,選擇,首先設(shè)計包含滾轉(zhuǎn)角度和滾轉(zhuǎn)角速度的快速終端滑模面
s=x2+αx1+β|x1|psgn(x1)
(5)
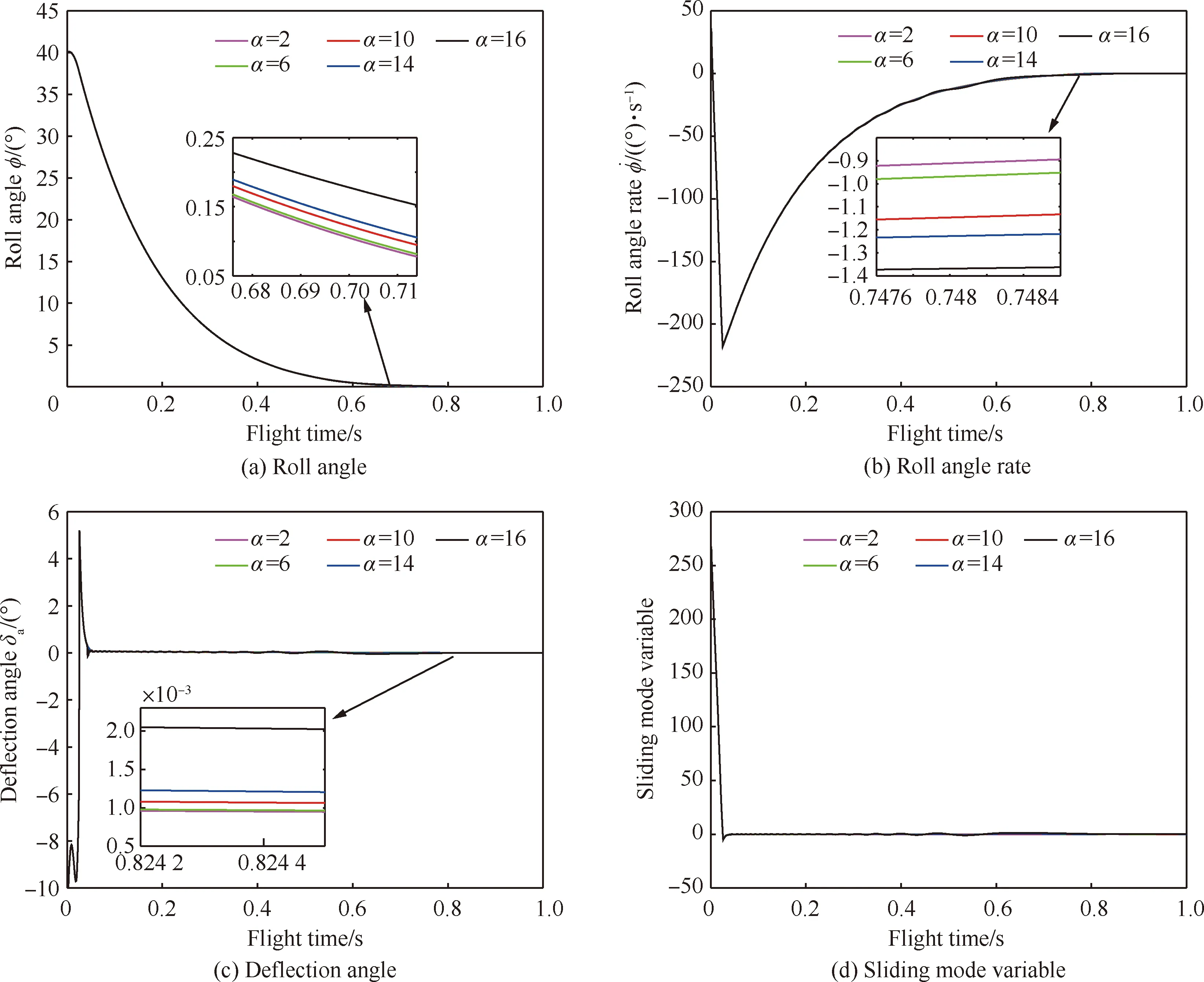
式中:α>0,β>0,1 對滑模面求一階導(dǎo)數(shù)得到 (6) 式中:F=Kδf。 選取自適應(yīng)滑模趨近率為 式中:Λ為設(shè)計參數(shù);ρ(t)為表達式為 (8) (9) 綜上,設(shè)計控制方法為 Λs-ρ(t)sgn(s))/F (10) 定理1針對滾轉(zhuǎn)通道執(zhí)行機構(gòu)故障失效動力學(xué)系統(tǒng)(4),采用所設(shè)計控制方法(10),則系統(tǒng)中滾轉(zhuǎn)角誤差和滾轉(zhuǎn)角速度能夠在有限時間內(nèi)收斂至滑模面s=0的下述鄰域內(nèi), (11) (12) 將式(10)代入式(7)可以得到 (13) 為證明系統(tǒng)的穩(wěn)定性,構(gòu)造Lyapunov函數(shù)為 (14) 對式(14)求一階導(dǎo)數(shù)得 (15) (16) 將式(16)代入(15)得 (17) 事實上 (18) 式(17)可以進一步化簡為 (19) (20) 第2節(jié)采用理想執(zhí)行機構(gòu)假設(shè),忽略執(zhí)行機構(gòu)動力學(xué)的影響。然而,在實際工程中,執(zhí)行機構(gòu)對執(zhí)行機構(gòu)指令的響應(yīng)存在滯后,如果忽略其影響,會引起一定誤差。因此,本節(jié)采用反步法設(shè)計控制方法,補償執(zhí)行機構(gòu)動力學(xué)滯后。首先,執(zhí)行機構(gòu)動力學(xué)可視為一階滯后環(huán)節(jié),表示為 (21) (22) 注意到系統(tǒng)(22)呈現(xiàn)出嚴(yán)格反饋的形式,因此可利用傳統(tǒng)的反步設(shè)計方法來設(shè)計執(zhí)行機構(gòu)指令uc,控制狀態(tài)變量x1和x2在有限時間內(nèi)收斂到零。 定義追蹤誤差z1=x2,并求其一階導(dǎo)數(shù)得到 (23) 根據(jù)式(10),設(shè)計如下虛擬控制律: ρsgn(s))/F (24) (25) 對系統(tǒng)(25),設(shè)計指令舵偏角uc為 (26) 式中:l1>0,l2>0,0<γ<1為待設(shè)計參數(shù)。 (27) 定理2考慮系統(tǒng)(22),所設(shè)計指令舵偏角(26)能夠控制狀態(tài)變量x1、x2和x3在有限時間內(nèi)收斂到一個零附近的小鄰域。 引理如果存在正定Lyapunov函數(shù)及參數(shù)β1>0,β3>0及β2∈(0,1)滿足: 則系統(tǒng)狀態(tài)能夠在有限時間內(nèi)到達原點,且時間Tr滿足: 式中:V(x0)為V(x)的初值。 (28) 根據(jù)引理,W1將在有限時間內(nèi)收斂到零。同理,結(jié)合定理1,V2將會在有限時間內(nèi)收斂到零附近的鄰域,證明完畢。 本節(jié)通過設(shè)計考慮駕駛儀滯后約束系統(tǒng)及進一步考慮失效系統(tǒng)的仿真實驗來驗證所設(shè)計的自適應(yīng)滑模控制方法的有效性和快速性。仿真參數(shù)如表2所示。 表2 設(shè)計參數(shù)Table 2 Design parameters 圖1 不考慮執(zhí)行機構(gòu)動力學(xué)滯后的仿真結(jié)果Fig.1 Simulation results without actuator lag constraint 圖1分別給出了擾動參數(shù)存在采用所設(shè)計控制方法得到的滾轉(zhuǎn)角度、滾轉(zhuǎn)角速度、舵偏角、滑模變量、自適應(yīng)參數(shù)的變化和自適應(yīng)參數(shù)對擾動估計的情況。圖1(a)和圖1(b)表明,滾轉(zhuǎn)角和滾轉(zhuǎn)角速度大致在0.7 s收斂到零,驗證了所設(shè)計控制方法(10)的快速性,高精度的控制能力。另外,從圖中可以看出,在不同飛行攻角條件下,滾轉(zhuǎn)角和滾轉(zhuǎn)角速度的收斂軌跡幾乎重合,驗證了設(shè)計控制方法的魯棒性。從局部放大圖可以看出收斂軌跡平滑,沒有出現(xiàn)抖振現(xiàn)象,驗證了控制方法良好的抑制抖振能力。圖1(c)展示了滾轉(zhuǎn)穩(wěn)定控制過程中執(zhí)行機構(gòu)實際的偏轉(zhuǎn)角度,其小于偏轉(zhuǎn)角速的輸入飽和限制,說明用于穩(wěn)定滾轉(zhuǎn)角度的控制資源較小,減少能量消耗。圖1(d)展示了滑模面的有限時間收斂特性。自適應(yīng)參數(shù)的變化情況如圖1(e)所示,自適應(yīng)參數(shù)在初期不斷變化,迫使?jié)L轉(zhuǎn)角和滾轉(zhuǎn)角速度的收斂。當(dāng)系統(tǒng)進入收斂域后,自適應(yīng)參數(shù)收斂,保證有界性。如圖1(f)所示,ρ(t)可以實現(xiàn)對擾動變化趨勢的跟蹤,用于抵消擾動對系統(tǒng)的影響。 對比圖1和圖2的仿真結(jié)果,在氣動擾動參數(shù)60%正向拉偏的情況下,仿真結(jié)果差異較小,進一步驗證了所設(shè)計容錯控制方法對氣動參數(shù)非線性變化的魯棒性。 綜上,當(dāng)存在執(zhí)行機構(gòu)動力學(xué)滯后時,所設(shè)計滑模自適應(yīng)控制方法有效補償執(zhí)行機構(gòu)動力學(xué)滯后,同時滿足執(zhí)行機構(gòu)輸入飽和限制,符合工程實際。 圖3 考慮執(zhí)行機構(gòu)動力學(xué)滯后的仿真結(jié)果Fig.3 Simulation results with actuator lag constraint 本小節(jié)將所設(shè)計滑模自適應(yīng)控制方法應(yīng)用到故障失效系統(tǒng)中分別對控制力失效因數(shù)f=0.3和f=0.9的情況下進行仿真分析。以彈藥保持16°飛行攻角為例,選擇初始滾轉(zhuǎn)角度為φ(0)= 30°。圖4分別給出了2種不同失效因數(shù)情況下的仿真結(jié)果。當(dāng)f=0.3時,由圖4(a)和圖4(b)可以看出,所設(shè)計容錯控制方法(26)能夠控制滾轉(zhuǎn)角度在0.8 s收斂到零,在執(zhí)行機構(gòu)失效的情況下仍使?jié)L轉(zhuǎn)角快速收斂,執(zhí)行機構(gòu)偏轉(zhuǎn)角度滿足輸入飽和限制。當(dāng)f=0.9時,由圖4(c)可知滾轉(zhuǎn)角約在0.7 s收斂到零,且執(zhí)行機構(gòu)偏轉(zhuǎn)角度滿足輸入飽和限制(圖4(d))。對比不同失效因數(shù)下的執(zhí)行機構(gòu)偏轉(zhuǎn)角度,當(dāng)失效嚴(yán)重時,執(zhí)行機構(gòu)增大偏轉(zhuǎn)角度來彌補執(zhí)行機構(gòu)控制效率降低的影響。針對不同失效因數(shù)下的滾轉(zhuǎn)通道進行的故障仿真說明,所設(shè)計容錯控制方法能夠?qū)崿F(xiàn)在執(zhí)行機構(gòu)失效情況下滾轉(zhuǎn)角的快速收斂。 圖4 f=0.3和f=0.9的故障系統(tǒng)Fig.4 Actuator fault system with f=0.3 and f=0.9 圖5給出了不同失效因數(shù)下的控制能量變化情況。對比發(fā)現(xiàn),失效嚴(yán)重(即f減小)的情況下,為實現(xiàn)滾轉(zhuǎn)穩(wěn)定,需要執(zhí)行機構(gòu)提供更多控制能量。 圖5 控制能量Fig.5 Control effort 1) 本文首先提出了一種基于自適應(yīng)滑模控制理論的滾轉(zhuǎn)穩(wěn)定容錯控制方法,所設(shè)計方法具有較強魯棒性,通過氣動參數(shù)拉偏仿真實驗,驗證了所設(shè)計控制方法對氣動參數(shù)的不敏感性。設(shè)計方法保證閉環(huán)系統(tǒng)的穩(wěn)定性和跟蹤性能。對比分析了執(zhí)行機構(gòu)在不同失效程度下,所設(shè)計控制方法對滾轉(zhuǎn)通道的控制能力,有效提高了滾轉(zhuǎn)通道的穩(wěn)定性。 2) 進一步考慮執(zhí)行機構(gòu)動力學(xué)滯后特性,使設(shè)計更接近工程實際。仿真結(jié)果表明,所設(shè)計控制方法能夠有效補償執(zhí)行機構(gòu)失效及執(zhí)行機構(gòu)動力學(xué)滯后,提高彈藥對控制指令的響應(yīng)速度,為后續(xù)提高彈藥制導(dǎo)精度提供基礎(chǔ)。









3 考慮執(zhí)行機構(gòu)動力學(xué)特性的滾轉(zhuǎn)控制方法設(shè)計



4 仿真分析
4.1 不考慮駕駛儀動力學(xué)的容錯滾轉(zhuǎn)穩(wěn)定控制方法



4.2 考慮駕駛儀動力學(xué)的容錯滾轉(zhuǎn)穩(wěn)定控制方法


4.3 考慮失效系統(tǒng)的自適應(yīng)滑模控制方法仿真


5 結(jié) 論
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39