一種升降機的粒子群優(yōu)化模糊 PID參數(shù)的控制器設(shè)計
2021-03-25 07:12:30張韶宇楊山坡史文祥婁燕鵬
礦山機械 2021年3期
關(guān)鍵詞:優(yōu)化
張韶宇,楊山坡,史文祥,婁燕鵬,李 歡
1中國船舶重工集團公司第七二五研究所 河南洛陽 471023
2成都西部泰力智能設(shè)備股份有限公司 四川成都 610031
在 工業(yè)生產(chǎn)中,升降機常用于人或物的垂直運輸。某電廠需要一臺升降機,將生產(chǎn)所需的原料組件從廠房操作平臺送至下方水池底部附近 (行程8 m),然后由原料組件抓取機進行水下操作。在運輸過程中,原料組件對速度和振動均有嚴(yán)格的要求,因而升降小車的速度控制要平穩(wěn)。該升降機的工作原理與提升機類似,由鋼絲繩牽引小車沿軌道移動。如果采用傳統(tǒng)的 PID 控制升降小車,會出現(xiàn)因小車速度的時變、非線性、純滯后等問題而引起振動[1-2],損傷原料組件,并加速升降機機械部件的老化。
為了精準(zhǔn)控制升降速度,降低小車的振動,筆者采用粒子群優(yōu)化算法 (Particle Swarm Optimization,PSO) 對模糊 PID 控制器中的量化因子和比例因子等參數(shù)進行優(yōu)化[3],實現(xiàn)自動調(diào)整和完善運行速度的目標(biāo),并進行了現(xiàn)場驗證。
1 設(shè)備方案
該升降機由機械和電氣兩部分組成,如圖 1 所示。機械部分主要由減速器、卷筒、軌道和升降小車等組成。電氣部分主要由觸摸屏、S7-1500 PLC、控制按鈕、變頻器、編碼器和稱重傳感器等組成。

圖1 原料組件升降機系統(tǒng)組成Fig.1 Constitution of raw material and component elevator system
在觸摸屏中設(shè)定小車的升降速度,PLC 的模糊PID 控制器輸出指令傳到變頻器,由變頻器控制減速器帶動卷筒轉(zhuǎn)動,由鋼絲繩牽引小車沿軌道上下移動。編碼器與 PLC 相連,可檢測減速器的轉(zhuǎn)速,通過機械傳動比可計算得到小車的移動速度,當(dāng)前速度與設(shè)定速度的差值和變化率被傳送到模糊 PID 控制器,模糊 PID 的輸出再通過變頻器、減速器、卷筒等控制小車的速度,從而實現(xiàn)小車速度的閉環(huán)控制。
由于模糊 PID 的控制參數(shù)需要根據(jù)大量的試驗結(jié)果并通過一定優(yōu)化方法才能獲得[4-6],所以筆者采用 PSO 算法方法來優(yōu)化模糊 PID 控制器的參數(shù)。通過“PLC 控制+變頻驅(qū)動+速度反饋系統(tǒng)”的控制結(jié)構(gòu),有效改善升降小車運行的平穩(wěn)性,降低超調(diào)量,減少調(diào)節(jié)時間,提高響應(yīng)速度和抗干擾能力,從而精確控制升降小車運動,減小其振動。
2 PSO 優(yōu)化模糊 PID 參數(shù)的控制器設(shè)計
基于 PSO 算法優(yōu)化方法而設(shè)計的升降機模糊自適應(yīng) PID 速度控制器原理如圖 2 所示。編碼器實時獲取升降小車的速度,由設(shè)定速度和當(dāng)前速度可獲得速度的偏差e,由當(dāng)前偏差和上次偏差可獲得偏差的變化ec。模糊控制器首先對e和ec進行模糊化計算,再由模糊控制規(guī)則作出相應(yīng)的邏輯推理和判斷,獲得 PID 控制器的調(diào)整參數(shù);然后根據(jù)PID 控制參數(shù)的初始值,得到新的 PID 控制參數(shù)Kp、Ki和Kd;最后再經(jīng)過 PID 控制器產(chǎn)生新的輸出量來控制被控對象。

圖2 基于 PSO 算法優(yōu)化的模糊自適應(yīng) PID 速度控制器原理Fig.2 Principle of fuzzy self-adaptive PID speed controller based on PSO algorithm
模糊控制器的輸入變量和輸出變量都具有固定的量化論域,輸入變量e和ec分別乘以相應(yīng)的輸入量化因子Ke和Kec后,得到輸入量化變量e-g和ec-g,其值的變化范圍對應(yīng)輸入量化論域。同理,輸出變量Δp、Δi和Δd分別乘以相應(yīng)的輸出比例因子KΔp、KΔi和KΔd后,得到輸出量化變量ΔKp、ΔKi和ΔKd,其值的變化范圍對應(yīng)輸出量化論域。模糊控制器的輸入量化因子和輸出比例因子需要采用 PSO 算法進行優(yōu)化選擇。
2.1 模糊控制器設(shè)計
模糊控制器主要由 3 個模塊組成:模糊化模塊、模糊推理模塊和清晰化模塊[7]。
2.1.1 模糊化模塊
模糊化模塊主要將數(shù)字形式的輸入轉(zhuǎn)化為模糊語言標(biāo)識的值,根據(jù)建立的輸入隸屬度函數(shù),將輸入的精確量轉(zhuǎn)換為模糊量,然后將模糊量映射到相應(yīng)的模糊控制論域中,這就是模糊化過程。通過模糊化過程將不同輸入量的精確值轉(zhuǎn)換成不同的模糊變量值,最終形成一個模糊集合。
語言變量及隸屬函數(shù)將誤差 (e-g) 及誤差的變化率 (ec-g) 根據(jù)其變化特點,在映射的模糊論域中建立 7 個模糊語言變量 (負(fù)大、負(fù)中、負(fù)小、零、正小、正中和正大),分別用 NB,NM,NS,ZO,PS,PM,PB 表示,輸入變量e-g和ec-g量化論域為[-6,6]。輸出語言增量為Δp、Δi和Δd,語言變量值取{NB,NM,NS,0,PS,PM,PB} 7 個模糊值,輸出變量Δp、Δi和Δd的量化論域均定為 [-10,10]。輸入變量隸屬度函數(shù)和輸出變量隸屬度函數(shù)分別如圖 3、4 所示。
2.1.2 模糊推理模塊
選擇 Mamdani 型模糊控制規(guī)則,根據(jù)e-g和ec-g的 7 個模糊變量,共輸出 49 條控制規(guī)則,建立Δp、Δi和Δd的模糊規(guī)則如表 1 所列。根據(jù)輸入到模糊控制器的e-g和ec-g,可得到它們各所對應(yīng)的隸屬度,然后根據(jù)表 1 找出輸出值Δp、Δi和Δd所對應(yīng)的隸屬度。
2.1.3 清晰化模塊
筆者采用的解模糊方法為重心法,其表達式為

圖3 輸入變量隸屬度函數(shù)Fig.3 Membership function of input parameters

圖4 輸出變量隸屬度函數(shù)Fig.4 Membership function of output parameters

式中:Z0為模糊控制器的輸出變量經(jīng)過解模糊后的精確值;Zi為模糊控制量在論域內(nèi)的量化值;μ c(Zi) 為Zi的隸屬度值。
經(jīng)過清晰化后可分別求得Δp、Δi和Δd的精確值。
在模糊 PID 控制器中,PID 的調(diào)整參數(shù)為

表1 Δp、Δi 和Δd 的模糊規(guī)則Tab.1 Fuzzy rules of Δp,Δi andΔd

式中:Kp、Ki、Kd分別為 PID 控制器的參數(shù);Kp0、Ki0、Kd0為對應(yīng)的初始參數(shù),通過常規(guī)方法可得。
在線運行過程中,將e-g和ec-g,Δp、Δi和Δd所對應(yīng)的 PID 參數(shù)模糊調(diào)整矩陣表存入程序儲存器中供查詢[8]。控制系統(tǒng)根據(jù)檢測系統(tǒng)的輸出值,與設(shè)定值比較后實時計算偏差e和偏差變化率ec,經(jīng)模糊化后查詢模糊調(diào)整矩陣表,通過清晰化后可得到調(diào)整量Δp、Δi和Δd,將各個調(diào)整量分別帶入式 (2)、(3)、(4) 后,可得到 PID 控制器的各控制參數(shù)Kp、Ki、Kd,用于 PID 控制的輸出。
2.2 模糊 PID 控制在 PLC 中的實現(xiàn)
針對西門子 S7-1500 PLC,筆者采用 STEP7 編程軟件和模塊化設(shè)計方法進行編程。在程序塊中,OB1 為主程序塊;OB30 為中斷程序,主要完成模擬量輸入/輸出操作和 PID 控制等程序;FB17 是具有模糊 PID 控制功能的程序塊,如圖 5 所示,在OB30 中被調(diào)用。在 FB17 程序塊的 DB 數(shù)據(jù)模塊中的OUTPUT,建立一個“fuzzy control”模糊控制表,如圖 6 所示,可實現(xiàn)表 1 的模糊推理功能,根據(jù)輸入e-g和ec-g的值,選擇出輸出值Δp、Δi和Δd所對應(yīng)的隸屬度。圖 7 所示為計算e和ec的程序。
2.3 基于 PSO 的模糊 PID 控制器的參數(shù)尋優(yōu)
在模糊 PID 控制器中,輸入量化因子Ke和Kec,輸出比例因子KΔp、KΔi和KΔd的值直接影響其控制效果。通常情況下,模糊 PID 控制器想要獲得理想的動態(tài)特性,需要通過大量現(xiàn)場試驗,然后利用人工經(jīng)驗選擇合適的量化因子和比例因子,但這種方法可能無法獲得最佳值。

圖5 PID 控制程序Fig.5 Control program of PID

圖6 模糊控制表Fig.6 Fuzzy control table
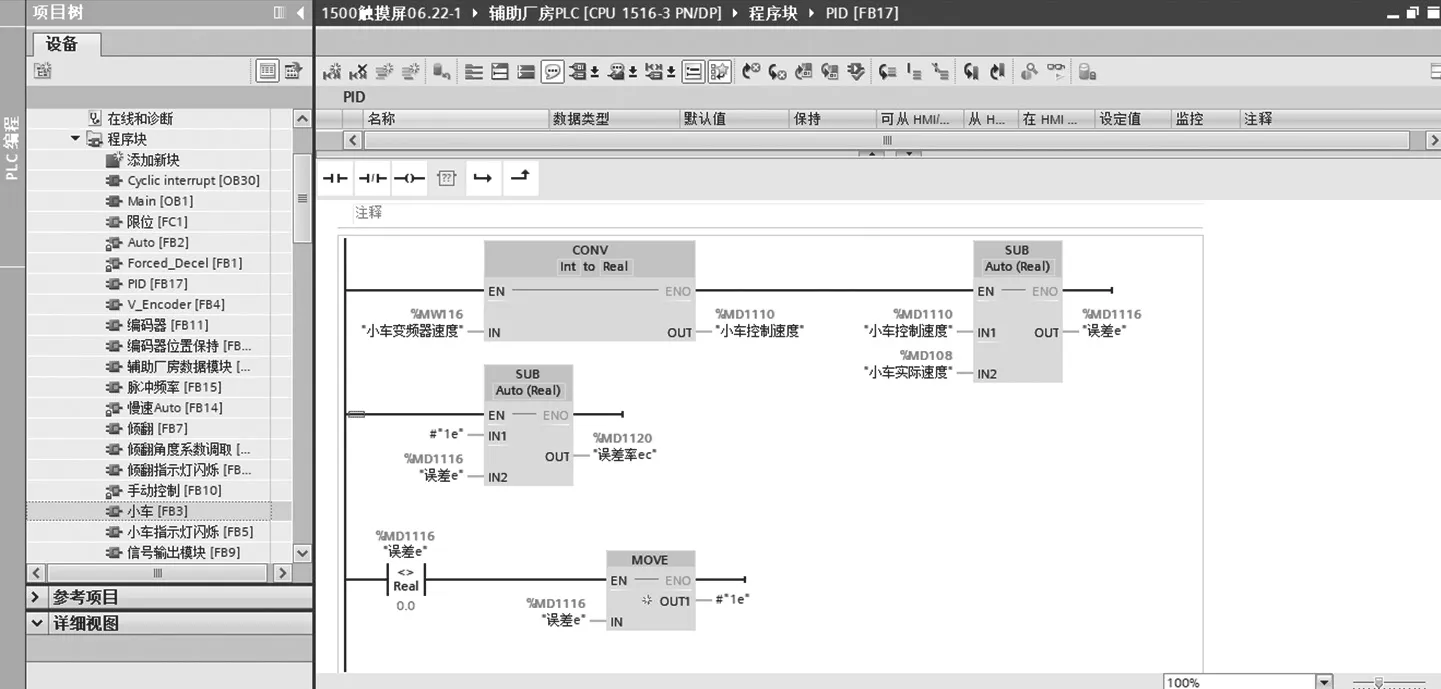
圖7 計算 e 和 ec 的程序Fig.7 Program of e and ec calculation
基于鳥群覓食行為而研究得出的 PSO 優(yōu)化算法是通過群體中個體之間的協(xié)作和信息共享來尋找最優(yōu)解,特別適合模糊控制系統(tǒng)中的參數(shù)優(yōu)化。為了確保對小車升降速度的精確控制,利用PSO 算法對模糊 PID 控制的量化因子和比例因子進行優(yōu)化[9]。
在 PSO 算法中,每個粒子都有當(dāng)前的速度和位置信息,可計算出每個粒子所對應(yīng)的最優(yōu)值和全局最優(yōu)解,然后將這些信息作為經(jīng)驗進行動態(tài)調(diào)整。優(yōu)化算法結(jié)束的條件是迭代次數(shù)達到設(shè)定值,或?qū)?yōu)目標(biāo)函數(shù)達到最小。針對模糊 PID 控制器的參數(shù)尋優(yōu),本次 PSO 算法中選擇的目標(biāo)函數(shù)為

式中:ts為試驗時間;e(t) 為t時刻設(shè)定值與當(dāng)前值的誤差。
采用 ITAE 準(zhǔn)則進行優(yōu)化,優(yōu)化時對系統(tǒng)初始誤差考慮較少,主要是限制過渡過程后期出現(xiàn)的誤差。優(yōu)化后的系統(tǒng)一般具有快速、平穩(wěn)、超調(diào)量小的特點。
PSO 優(yōu)化流程如圖 8 所示。優(yōu)化時選擇參數(shù)如下:粒子種群數(shù)量為 500,粒子的維數(shù)為 5,量化因子Ke和Kec及比例因子KΔp、KΔi和KΔd的初始值設(shè)定為 [2,2,2,2,2],最大迭代次數(shù)為 200,粒子的速度范圍為 [-1 000,1 000],粒子的位置范圍為[-8,8]。在現(xiàn)場進行聯(lián)機試驗時,將 PLC 中模糊 PID控制過程中的e和ec不斷輸入到上位機的 PSO 算法中,經(jīng)過優(yōu)化得到的參數(shù)為:Ke=4.9,Kec=5.4,KΔp=4.3,KΔi=7.52,KΔd=8。

圖8 PSO 優(yōu)化流程Fig.8 Optimization program of PSO
3 系統(tǒng)實際運用和分析
分別采用未優(yōu)化參數(shù)的模糊 PID 控制方式和 PSO優(yōu)化后的模糊 PID 控制方式進行升降小車的現(xiàn)場試驗,通過博圖軟件監(jiān)控實際調(diào)控過程中的速度變化,結(jié)果如圖 9 所示。試驗運行時間為 120 s,速度信號在前 60 s 由規(guī)定速度降為零,后 60 s 速度由零升至指定速度,輸入控制方式中包含跳躍信號。由圖 9 可以看出,經(jīng) PSO 優(yōu)化的模糊 PID 控制器明顯比未優(yōu)化的模糊 PID 控制器響應(yīng)更加快速,超調(diào)量小,沒有明顯的震蕩,能有效提高控制系統(tǒng)的動態(tài)穩(wěn)定性,減小振動。
4 結(jié)論

圖9 監(jiān)控界面上監(jiān)控調(diào)速曲線Fig.9 Speed control curve on monitoring interface
由于升降機工作過程中,運行機構(gòu)長期處于糾偏狀態(tài),會出現(xiàn)明顯的震蕩現(xiàn)象,必須提高控制系統(tǒng)的平穩(wěn)性以及抗干擾能力。基于傳統(tǒng) PID 控制和常規(guī)模糊控制系統(tǒng),提出一種基于 PSO 優(yōu)化的模糊 PID 控制算法,對其系統(tǒng)的模糊 PID 控制器的參數(shù)進行優(yōu)化。該算法一方面可以自行對參數(shù)進行優(yōu)化控制,另一方面控制無需特定對象。研究結(jié)果表明,采用 PSO優(yōu)化后,小車的速度調(diào)節(jié)具有超調(diào)量小、上升時間短、響應(yīng)速度快、穩(wěn)定性好、抗干擾能力強等優(yōu)點,可增加鋼絲繩的使用壽命,使控制更加平順,降低機械結(jié)構(gòu)的振動,減少對物料組件的傷害。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
