一種新型電磁式主動吸振器的設計和試驗研究
2021-03-25 01:55:06冼鴻威
汽車技術 2021年3期
冼鴻威
(廣州汽車集團股份有限公司汽車工程研究院,廣州 511434)
主題詞:主動吸振器 電磁力 比例電磁鐵 主動控制
1 前言
為改善由發動機激勵引起的結構件振動,采用動力吸振器進行振動控制是有效的減振方法[1]。高普[2]等將車輛動力傳動系統的振動頻帶分段,針對各敏感頻率安裝了幾個經參數匹配的被動吸振器,有效衰減了一定頻帶內的振動,但吸振系統體積、質量較大,難以廣泛應用到汽車領域。郎君[3]等采用半主動開關位移-速度控制策略對Voigt型動力吸振器進行性能分析并對其中的關鍵參數進行優化,在隨機激勵下驗證了該控制策略的有效性,但由于該半主動吸振器難以實現較大幅度的固有特性調整,因此難以滿足對寬頻振動問題的減振要求。傅濤[4]等對一種E型電磁作動器的電磁力特性進行了研究,發現隨著動、靜鐵心間隙增大,電磁力呈非線性特性,導致作動器作用力峰值和谷值不相等,影響主動吸振器的振動控制效果。Hassan[5]等采用永磁體提供穩定磁場設計主動吸振器,其作動力與電流幅值近似為線性關系,效果良好,但永磁體成本較高,性能易受溫度影響,在工程應用上受到限制。
本文提出一種新型電磁式主動吸振器,對其結構進行設計研究,使其具有吸振頻帶寬的特點。首先,對主動吸振器作動器的電磁力原理進行分析;其次,結合有限元方法和試驗,對主動吸振器的動鐵心和靜鐵心結構進行設計,使得電磁力幅值在一定的動鐵心位移范圍內近似恒定。最后,以簡支鋼板為主系統搭建主動振動控制試驗平臺,驗證電磁式主動吸振器的減振性能。
2 電磁式主動吸振器結構及減振原理
2.1 電磁式主動吸振器結構
電磁式主動吸振器結構如圖1 所示。動鐵心與靜鐵心均為導磁性能良好的鐵磁材料,線圈固定在動鐵心上,動鐵心與靜鐵心之間通過彈簧連接,靜鐵心與主系統固定連接,動鐵心可沿導軌上下運動。當線圈中通有電流時,動鐵心與靜鐵心間產生電磁力,其作用力與反作用力分別作用在動鐵心和靜鐵心上。通過控制輸入線圈的電流幅值、頻率及相位,可控制動鐵心的往復運動,從而控制主動吸振器施加到主系統的慣性力,以實現主系統的振動控制。
2.2 電磁式主動吸振器的減振原理
圖2 所示為簡化的電磁式主動吸振系統物理模型。假設主系統質量、剛度及阻尼分別為m1、k1和c1,f為主系統受到的簡諧激勵力,主動吸振器的質量、剛度及阻尼分別為m2、k2和c2,當主動吸振器線圈通有電流時,動鐵心與靜鐵心間產生電磁力fc分別作用到m2和m1上,設主系統及主動吸振器的位移分別為x1和x2,此時主系統與主動吸振器動鐵心的運動微分方程分別為:

結合式(1)和式(2),有:


控制電磁力fc,使主動吸振器動鐵心往復運動所產生的慣性力f2=-f,代入式(4),可得,即f2抵消了外界激勵力f對主系統的影響[6],實現對主系統的減振。
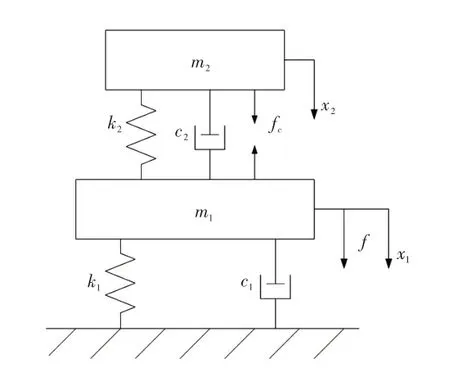
圖2 主動吸振系統模型
3 電磁式主動吸振器的電磁力分析及測試
3.1 電磁式主動吸振器的電磁力原理
作動器磁路(見圖1)中,由麥克斯韋電磁力公式[7],動、靜鐵心間的電磁力fc為:

式中,Bg為鐵心間氣隙磁感應強度;Sg為氣隙截面積;μ0為空氣磁導率。
當線圈中通有正弦變化的電流i=Imsin(ωit)時,式(5)可表達為:

式中,δg為鐵心間的氣隙長度;N為線圈匝數。

式中,FD=Fm;FA=-Fmcos(2ωit)。
可見,當線圈中通有交流電時,電磁力由2 個部分組成,即1個與交流電頻率無關的分量FD和1個與交流電頻率有關的分量FA。動鐵心受FA作用而發生往復運動,頻率與FA的頻率相同,為交流電頻率的2倍,振幅與交流電最大值的平方成正比。因此,可通過控制輸入線圈交流電的頻率、幅值及相位來控制FA的頻率、幅值及相位,從而控制吸振器動鐵心的運動。
然而,當動鐵心發生往復運動時,氣隙長度δg隨動、靜鐵心間距的變化而變化,此時Fm不為常數,電磁力為既關于氣隙長度δg也關于時間t的二元函數。若Fm不為常數,則主動吸振器輸出的慣性力幅值也不為常數,不利于抵消主系統受到的外界簡諧激勵力,將影響主動吸振器的減振效果。因此,有必要對電磁鐵結構進行設計,使Fm在動鐵心往復運動過程中保持近似恒定。
3.2 電磁式主動吸振器的電磁力仿真計算
采用比例電磁鐵結構對動、靜鐵心進行設計,使一定的動鐵心位移行程內Fm近似恒定[8]。在一定的直流電下,比例電磁鐵和普通開關電磁鐵的電磁力特性對比如圖3所示。

圖3 2種類型電磁鐵的電磁力特性示意
基于比例電磁鐵結構,設計電磁式主動吸振器結構如圖4所示,動鐵心與靜鐵心之間的吸合部分設計成相錯的結構[9]。靜鐵心由導向機構壓緊固定在底座上,底座通過螺栓固定在主系統上;動鐵心與線圈相對固定并由橡膠彈簧支撐;動鐵心可在電磁力與橡膠彈簧回復力的共同作用下沿導向機構相對靜鐵心上下運動,從而對主系統輸出慣性力。動鐵心與線圈組合的質量為0.8 kg,橡膠彈簧剛度為15×103N/m,因此主動吸振器的固有頻率約為21.8 Hz。

圖4 電磁式主動吸振器剖面
采用有限元軟件ANSYS計算不同電流下電磁式主動吸振器動鐵心所受電磁力隨位置的變化情況。由于結構中僅動鐵心與靜鐵心采用導磁性能良好的材料,線圈為銅制,其他結構均采用非導磁材料,磁導率與空氣相當,對磁場和電磁力的影響較小[10],因此,在對結構的建模過程中,僅對動、靜鐵心及線圈進行有限元建模,忽略其他非導磁結構,以降低模型復雜程度,提升計算速度。
首先建立電磁式主動吸振器動鐵心、靜鐵心及線圈的三維模型,然后分別添加材料屬性。由于動、靜鐵心材料均采用Q235-A,其導磁性能與有限元軟件材料庫中steel-1008 接近,因此定義動、靜鐵心材料為steel-1008,其磁感應強度-磁場強度曲線(B-H曲線)如圖5所示;主動吸振器線圈采用銅漆包線,因此在軟件中定義線圈材料為copper,匝數為146匝;最后定義求解域為真空。完成材料定義后,采用四面體結構對各部分自動進行網格劃分,生成的三維有限元模型如圖6所示。

圖5 steel-1008的B-H曲線
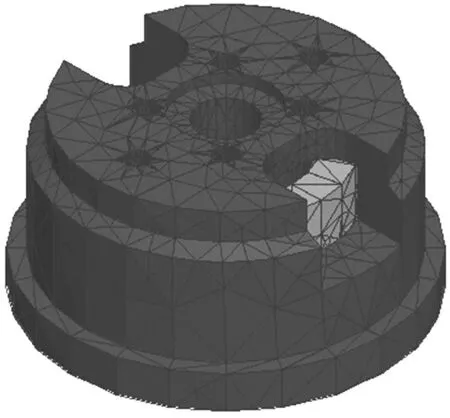
圖6 鐵心及線圈的三維有限元模型
在對作動器模型進行仿真分析時,靜鐵心固定,以動鐵心與靜鐵心吸合面接觸時的位置為初始位置,使動鐵心沿軸向遠離靜鐵心移動,最大行程12 mm,步長1 mm,線圈通入直流電,計算得到不同電流下動鐵心所受電磁力隨動、靜鐵心間距的變化情況,如圖7所示。

圖7 不同電流下電磁力隨動、靜鐵心間距的變化
由圖7 可知:在一定電流下,動、靜鐵心間距在2~8 mm 范圍內時,電磁力近似恒定;隨著電流增大,波動越來越明顯,電流為5 A時,2~8 mm范圍內電磁力最大偏差為15%。對于本文研究的電磁式主動吸振器,當動鐵心處于靜平衡位置時,距離靜鐵心約4 mm,因此當動鐵心在±2 mm 范圍內振動時,Fm近似恒定,此時FA近似為簡諧力,動鐵心的穩態響應為簡諧振動,主動吸振器輸出慣性力為簡諧力。
3.3 電磁式主動吸振器的電磁力測試
為驗證圖7所示的電磁力計算結果,對電磁式主動吸振器的作動器進行測試,測試系統如圖8所示。測試的吸振器已去除橡膠彈簧,僅保留動鐵心、靜鐵心及導向機構。所用拉力機為INSTRAN-3365,動鐵心通過工裝固定在拉力機下端的固定端,靜鐵心通過導向機構的螺栓與拉力機加載端固定。吸振器線圈電流由連續可調線性直流電源提供,電流范圍為1~5 A,步長1 A。在各電流下,以靜鐵心與動鐵心接觸時的位置為初始位置,使拉力機加載端向上緩慢加載,行程11 mm。過程中電磁力變化由拉力機上的力傳感器(量程100 N,精度0.5%)直接測量記錄。
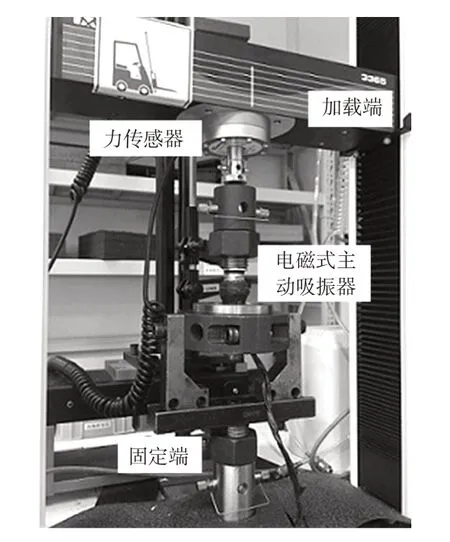
圖8 電磁力測試系統
電磁力測試結果見圖7。結果表明,動、靜鐵心間距在2~8 mm范圍內時,電磁力近似恒定,與計算結果吻合,證明了仿真模型的有效性。計算結果與測試結果在電流較大及動、靜鐵心間距較大時存在一定偏差,這是由于實際材料的B-H特性與仿真模型存在一定誤差,電流較大時導磁材料的磁感應強度接近飽和,以及測試系統中存在除動、靜鐵心外的其他導磁結構,使測試過程中動、靜鐵心間的磁場分布情況與仿真計算不完全一致引起的。
4 輸出慣性力測試及簡支鋼板振動控制試驗
4.1 電磁式主動吸振器輸出慣性力測試
根據電磁力仿真及測試結果,若固定靜鐵心并對線圈通入正弦交流電,在一定的電流幅值下,動鐵心小幅振動時Fm近似恒定,此時動鐵心的穩態響應應為簡諧振動。為驗證主動吸振器輸出慣性力是否為簡諧力,需要對其進行測試。
測試系統如圖9 所示,由電磁式主動吸振器、加速度傳感器、力傳感器及LMS 數據采集系統組成,其中,LMS 數據采集系統既作為信號發生器也作為信號采集器。吸振器底座通過工裝與力傳感器固定,力傳感器固定在基座上,采集吸振器輸出的慣性力,基座與地面固定;加速度傳感器固定在吸振器動鐵心上,用于對比力傳感器的測量值,驗證其準確性。

圖9 電磁式主動吸振器輸出慣性力測試系統
LMS以0.5 Hz為間隔向功率放大器輸入8~20 Hz的正弦信號;在每個頻率下,功率放大器以0.5 A為間隔依次向主動吸振器輸入有效值為1~5 A 的正弦交流電。主動吸振器動鐵心在交流電流的作用下發生振動,并向力傳感器輸出慣性力,力傳感器將采集到的力信號傳送給LMS;固定在吸振器動鐵心上的加速度傳感器將動鐵心的振動加速度信號傳送給LMS。吸振器輸出的慣性力結果如圖10所示,波峰與波谷值如表1所示。
主動吸振器輸出慣性力結果表明,受正弦交流電激勵的主動吸振器輸出的慣性力近似為簡諧力。但在頻率10 Hz、有效值2 A的電流輸入下,主動吸振器輸出慣性力的波峰與波谷絕對值有一定差異。分析其原因,需要計算動鐵心的穩態響應振幅X:

式中,k為橡膠彈簧剛度;ωn為主動吸振器固有頻率;ζ為橡膠彈簧阻尼比。
由圖7 可知,交流電有效值為2 A 時,Fm≈5.2 N,k=15×103N/m,電磁力激勵頻率與主動吸振器固有頻率之比2ωi/ωn≈0.92。
忽略橡膠阻尼,即令ζ=0,由式(8)求得,在圖10b的激勵條件下,X≈2.26 mm,超出了電磁力恒定段±2 mm的范圍,動鐵心在遠離和接近靜鐵心的2個極限位置所受到的電磁力不相等,導致主動吸振器輸出慣性力的波峰與波谷值不相等。
顯然,該現象將對主動吸振器的減振效果帶來不利影響,因此應盡可能避免在自身共振頻率附近大電流工作。

圖10 各電流下主動吸振器輸出慣性力結果

表1 電磁式主動吸振器輸出力波峰與波谷值對比 N
4.2 簡支鋼板振動控制試驗
為驗證電磁式主動吸振器的振動控制效果,搭建了如圖11所示的簡支鋼板振動控制試驗系統,由鋼板、橡膠塊、電磁式主動吸振器、激振器、加速度傳感器、LMS數據采集系統、功率放大器及電流控制系統構成。試驗系統中,鋼板作為主系統質量單元,由4 個橡膠塊并聯支撐,這些橡膠塊組成主系統的剛度單元,該系統垂向固有頻率為23.6 Hz。電磁式主動吸振器固定安裝在鋼板中心位置,其固有頻率約21.8 Hz,與簡支鋼板主系統的垂向固有頻率接近。激振器固定在地面上,激振桿與鋼板剛性連接,利用LMS 數據采集系統發出簡諧信號至功率放大器,功率放大器驅動激振器激振桿對鋼板進行垂向簡諧激勵。鋼板上布置有加速度傳感器采集鋼板的振動加速度信號。
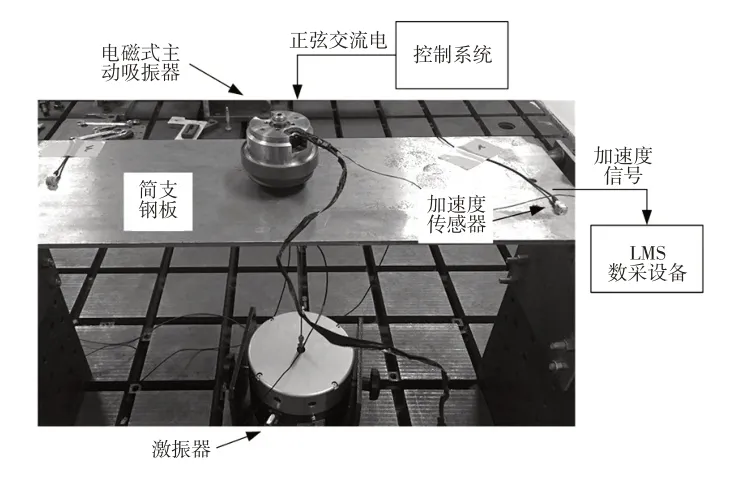
圖11 簡支鋼板振動控制試驗系統
試驗中,鋼板受到持續簡諧激勵的作用發生垂向振動,同時通過電流控制系統調節輸入到主動吸振器線圈交流電流的頻率、幅值及相位,來調節主動吸振器對鋼板輸出慣性力的頻率、幅值及相位,以抵消激振器作用于鋼板的激勵力,實現對鋼板的主動振動控制。
分別對簡支鋼板主系統共振區20 Hz和25 Hz以及非共振區40 Hz進行振動控制,結果如圖12和表2所示。

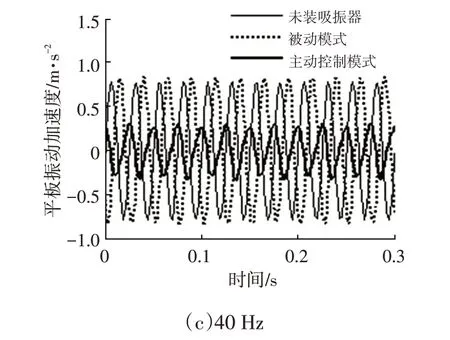
圖12 不同激勵頻率下減振效果對比
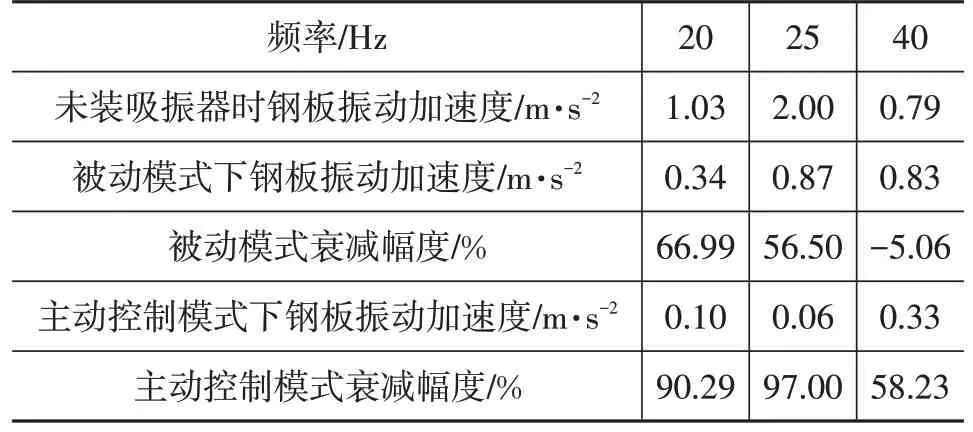
表2 電磁式主動吸振器對鋼板的減振效果對比
被動模式為主動吸振器線圈未通電,作為被動吸振器使用;主動控制模式即主動調節通入線圈交流電的各參數,對鋼板主系統進行主動振動控制。
結果表明,電磁式主動吸振器工作在被動模式下對簡支鋼板主系統共振區振動起到一定的減振效果,而在主動控制模式下,鋼板主系統的振動加速度幅值大幅衰減。對非共振區的振動,吸振器在被動模式下未能對鋼板主系統產生減振效果,而在主動控制模式下減振效果明顯。可見,電磁式主動吸振器在主動控制模式下能在寬頻范圍內對主系統振動進行有效減振。
5 結束語
為解決寬頻振動問題,本文基于比例電磁鐵結構,設計了一種電磁式主動吸振器,并對其輸出慣性力特性及減振性能進行了研究。基于電磁作動器推導的電磁力數學模型表明,在交流電作用下,動鐵心往復運動過程中由于與靜鐵心之間的氣隙長度發生變化,導致電磁力幅值存在非線性特性。
基于比例電磁鐵結構對電磁式主動吸振器進行了設計,測試結果表明,電磁式主動吸振器輸出慣性力近似為簡諧力,可用于對結構進行振動控制。
相比于被動模式,電磁式主動吸振器在主動控制模式下,對簡支鋼板主系統共振區及非共振區振動均有明顯減振效果,具有以單個動力吸振器對較寬頻率范圍內的振動問題進行控制的能力,有較好的振動抑制性能。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年8期)2022-06-05 07:36:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
