基于正弦曲線的純電動汽車兩擋AMT升降扭控制*
2021-03-25 01:55:04鄧濤鄧彪
汽車技術(shù) 2021年3期
關(guān)鍵詞:控制策略
鄧濤 鄧彪
(重慶交通大學(xué),重慶 400074)
主題詞:純電動汽車 機械式自動變速器 駕駛平順性 硬件在環(huán) 實車測試
1 前言
機械式自動變速器(Automated Mechanical Transmission,AMT)具有結(jié)構(gòu)簡單、傳動效率高、燃油消耗量低、性價比高、工作可靠性強等優(yōu)良性能,在純電動汽車上具有廣闊的應(yīng)用前景[1]。
車輛的換擋平順性是AMT換擋控制系統(tǒng)的核心問題,換擋品質(zhì)的優(yōu)劣直接影響駕乘舒適性,甚至系統(tǒng)可靠性。在保證換擋時間的前提下,如何降低換擋沖擊度、提高駕駛平順性至關(guān)重要[2]。Yuch 等[3]研究電動汽車無離合器AMT 的可行性并提出了相應(yīng)的控制方法。劉正偉等[4]采用基于模型參考的自適應(yīng)PID控制算法降低了換擋沖擊度。張志森等[5]研究主驅(qū)動電機在換擋過程中的控制策略,并進行數(shù)據(jù)采集與分析,驗證了所提出的選換擋過程控制策略的可行性。以上研究都是針對整個換擋過程的控制策略,并沒有進行換擋過程細化研究。同時,關(guān)于換擋過程中升降扭過程的研究更少,但換擋升降扭過程是決定沖擊度大小的關(guān)鍵因素,而沖擊度是駕駛平順性的重要評價指標(biāo)。
為了有效降低換擋過程中的沖擊度,本文提出基于正弦曲線的升降扭控制策略,針對純電動汽車兩擋AMT 的變速器控制單元(Transmission Control Unit,TCU)控制需求進行TCU 軟件系統(tǒng)開發(fā),并進行相應(yīng)的模型在環(huán)(Model in the Loop,MIL)、軟件在環(huán)(Software in the Loop,SIL)、硬件在環(huán)(Hardware in the Loop,HIL)和臺架測試驗證控制策略的有效性,最后通過實車標(biāo)定驗證該策略在降低換擋沖擊度中的有效性。
2 基于正弦波曲線的升降扭控制策略
純電動汽車AMT 換擋控制主要包括5 個過程:降矩、摘擋、電機調(diào)速、掛擋和扭矩恢復(fù)[6],具體控制流程如圖1所示。

圖1 換擋流程示意
2.1 降扭階段
降扭階段清除驅(qū)動電機扭矩,保證換擋機構(gòu)平緩掛擋,沖擊度j可由縱向加速度變化率表示[7]:

式中,a為車輛的縱向加速度;v為車速;t為時間。
降扭階段驅(qū)動電機的動力輸出與車輪端存在動力學(xué)關(guān)系,則沖擊度可表示為:

式中,ig為擋位速比;i0為主減速比;ηt為傳動效率;δ為旋轉(zhuǎn)質(zhì)量換算系數(shù);m為整車質(zhì)量;r為車輪半徑;Tm為驅(qū)動電機扭矩。
降扭階段產(chǎn)生的沖擊度與驅(qū)動電機的扭矩變化率成正比關(guān)系,因此,應(yīng)限制驅(qū)動電機扭矩變化率。另外,俯仰角變化幅度越大,則產(chǎn)生的換擋沖擊度越大,換擋平順性越差。
目前,AMT換擋升降扭過程采用直線升降扭控制,不能有效降低換擋沖擊度,本文基于正弦波函數(shù)形式控制扭矩變化率,在整個降扭過程中通過實時輸入當(dāng)前扭矩Tn、車速v和加速度a,以不同降扭步長Tstep進行扭矩清零。降扭過程進行n(n的初始值為0)次降扭輸出目標(biāo)扭矩Ttar,且每次降低的扭矩為Tred,同時采用二分法控制降扭變化率,達到曲線降扭的目的。
2.1.1 正常降扭階段
在發(fā)出換擋命令時,當(dāng)前扭矩Tn作為降扭初始值,通過當(dāng)前車速與加速度大小,以最小降扭步長Tmin_step開始降扭:
n=0時,有:

n>0時,有:

2.1.2 加速降扭階段
判斷降扭過程中扭矩的變化速度,以及車速與加速度的變化,隨時調(diào)整降扭變化率:

式中,Tmax_step為最大降扭步長。
式(5)滿足時,重新計算Tred:

2.1.3 減速降扭階段
當(dāng)Tstep≥Tmax_step,且n>1時,輸出扭矩為:

2.1.4 扭矩正常階段
當(dāng)Tn≤Tred時,則進入扭矩正常階段,按照以下形式進行降扭:

通過以上算法進行計算,當(dāng)Tn=Ttar時,完成降扭過程,同時,升扭過程也按照此算法進行。
根據(jù)每個階段扭矩升降值的變化得到換擋過程中扭矩變化規(guī)律與換擋過程中車速與加速度的變化關(guān)系,以及不同油門踏板開度k下升降扭矩步長Tstep,如表1所示。在滿足換擋需求時,目標(biāo)扭矩與當(dāng)前油門踏板開度下扭矩的差值與Tstep相乘,得到升降扭過程扭矩的變化梯度,該變化梯度按正弦曲線變化,如圖2所示。

表1 不同油門踏板開度對應(yīng)的Tstep
2.2 仿真驗證
根據(jù)以上升降扭控制算法搭建曲線升降扭模塊,并集成在換擋扭矩控制模塊中。扭矩控制模塊包含升扭模式、降扭模式、正常行車模式、扭矩跟隨模式、靜態(tài)掛擋模式、扭矩輸出為0模式以及不掛擋扭矩正常輸出模式,并通過仿真驗證算法的可實施性,如圖3所示。

圖2 正弦曲線降扭曲線
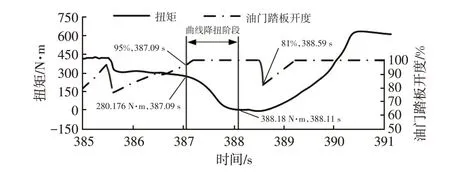
圖3 曲線降扭仿真結(jié)果
由圖3 可知,在控制AMT 換擋時,驅(qū)動電機在摘擋前按照正弦曲線降扭形式完成卸扭動作。
根據(jù)該算法,以車速和加速度作為輸入,以多組Tn和Tstep進行仿真,在不同車速與加速度下找到最優(yōu)的Tmax_step和Tred,從而獲取最優(yōu)的升降扭曲線。
3 TCU軟件開發(fā)
為了驗證該曲線降扭控制算法在實車上的可行性,將該算法集成至TCU 中。按照“V”型開發(fā)模式進行TCU 軟件開發(fā),包括項目輸入、系統(tǒng)分析、軟件需求分析、軟件架構(gòu)設(shè)計、軟件詳細設(shè)計、軟件實現(xiàn)、單元測試(MIL、SIL)、集成測試、HIL 測試、臺架驗證以及實車標(biāo)定等[8]。主要設(shè)計流程如圖4所示。
3.1 TCU軟件設(shè)計分析
TCU設(shè)計必須實現(xiàn)駕駛員意圖識別、擋位位置自學(xué)習(xí)、坡道識別、電機調(diào)速、換擋過程協(xié)調(diào)控制、故障診斷和標(biāo)定等功能。根據(jù)TCU 軟件的功能需求,搭建TCU控制架構(gòu)如圖5所示。
3.2 單元測試與集成測試
單元測試可驗證控制系統(tǒng)模型各子模塊的功能邏輯,集成測試是將各子模塊集成后按照既定的控制需求運行,并確保各子模塊功能正常運行[9]。建立測試環(huán)境,輸入測試用例,設(shè)定模塊的參數(shù)值,將實際輸出值與期望值進行對比,生成相應(yīng)的測試報告,檢驗覆蓋度。換擋控制模塊的MIL測試結(jié)果如表2所示。

圖4 設(shè)計流程示意

圖5 TCU架構(gòu)

表2 MIL測試結(jié)果 %
SIL 測試采用與MIL 相同的測試用例,測試結(jié)果表明,代碼與控制模型功能一致。
3.3 HIL測試
通過MATLAB/Simulink/NI VeriStand、TCU 控制器以及Test Base聯(lián)合搭建HIL[10]測試平臺,如圖6所示。

圖6 HIL測試環(huán)境
根據(jù)TCU功能需求編寫測試用例,根據(jù)整車狀態(tài)、不同擋位以及當(dāng)前擋位位置等對換擋電機控制策略、換擋撥叉位置、換擋故障診斷、換擋模式等進行閉環(huán)測試,并且根據(jù)期望輸出擋位Gh與實際輸出擋位Gt值,以及相應(yīng)的故障代碼Ce驗證各控制模塊的可行性,結(jié)果如表3所示。其中,Ce=4表示傳感器故障,Ce=7~11分別表示VCU掉線、MCU掉線、過壓故障、低壓故障和換擋超時故障。

表3 HIL測試結(jié)果
將曲線升降扭控制策略加載至整個TCU 控制平臺進行HIL 仿真,驗證曲線升降扭控制策略的功能性,如圖7所示。在換擋時,電機扭矩按照曲線降扭形式進行卸扭,且換擋時間為500~700 ms,滿足需求,說明該控制策略可以有效地應(yīng)用在整個TCU控制系統(tǒng)中。
3.4 臺架測試
搭建TCU 測試臺架,如圖8 所示,將測試通過的TCU 控制程序下載到TCU 中,并對換擋電機、電機調(diào)速、擋位位置、換擋力和換擋各行程等進行標(biāo)定,驗證兩擋AMT選換擋機構(gòu)位置及換擋功能[11]。


圖7 曲線升降扭HIL仿真驗證

圖8 臺架測試
在臺架測試過程中,首先通過INCA 標(biāo)定軟件進行手動換擋控制,調(diào)整脈沖寬度,驅(qū)動換擋電機換擋,觀測此時換擋電機狀態(tài),并進行換擋電機調(diào)速標(biāo)定,根據(jù)控制邏輯,標(biāo)定各擋換擋撥叉位置。換擋速度決定了AMT 換擋機構(gòu)對換擋力需求。相同工況下,換擋力越大,電機功率越大,對應(yīng)耗能大,從而換擋電機和換擋機構(gòu)增大,導(dǎo)致車輛的耗能增大,因此換擋力較小為好。對應(yīng)的換擋行程即換擋撥叉運動行程,換擋電機測試結(jié)果如圖9所示。
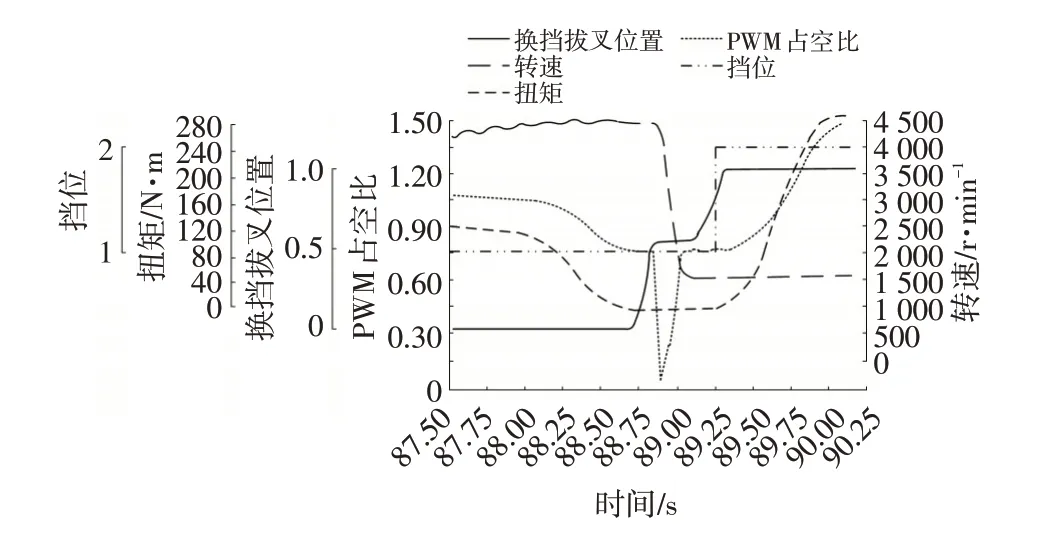
圖9 換擋電機測試結(jié)果
4 實車標(biāo)定
4.1 搭建實車測試平臺
將上述通過測試的TCU 程序加載到控制器,搭載實車測試平臺,如圖10 所示。在相同的油門踏板開度下,對比原有的直線升降扭控制和本文提出的基于正弦曲線的升降扭控制策略,分析俯仰角的變化幅度,驗證本文提出的控制策略的可行性和有效性。

圖10 現(xiàn)場測試
4.2 路試數(shù)據(jù)分析
相同路況下測試多組不同油門踏板開度下?lián)Q擋過程中直線升降扭和正弦曲線升降扭(下文統(tǒng)稱曲線升降扭)對應(yīng)的俯仰角變化程度。利用加速度傳感器和行車記錄儀記錄換擋時加速度a、加速度變化率a′以及俯仰角θ的變化,結(jié)果如圖11所示。


圖11 不同油門踏板開度下俯仰角變化
通過上述數(shù)據(jù)分析,得到直線降扭控制與曲線降扭控制對應(yīng)的換擋時間t、俯仰角θ和加速度變化率a′如表4所示。由表4可知,在相同油門踏板開度下,加速度變化率幾乎一致,曲線升降扭控制下的汽車俯仰角的變化范圍小于直線降扭控制,且兩種控制策略下對應(yīng)的換擋時間均為500~700 ms,說明在保證換擋時間的前提下,本文提出的曲線升降扭控制可以有效降低換擋沖擊,提升換擋平順性。
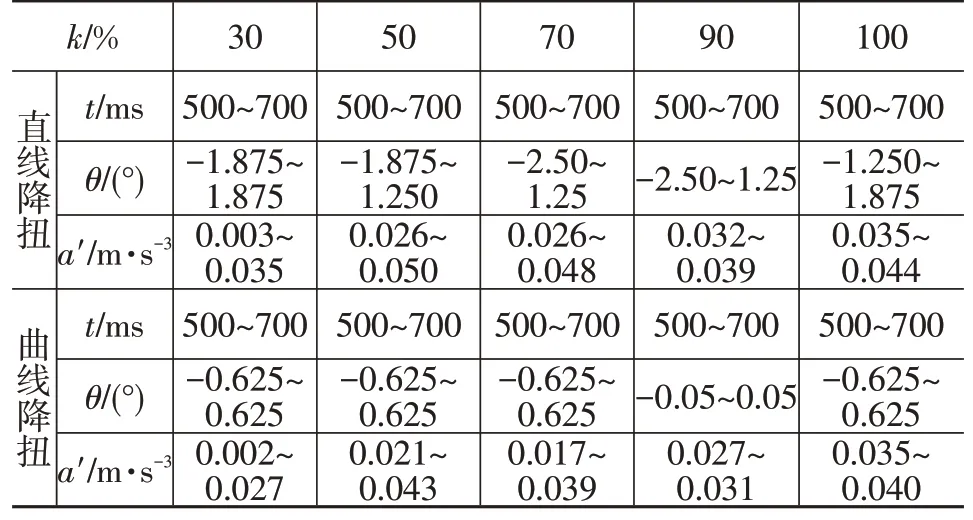
表4 數(shù)據(jù)分析
5 結(jié)束語
本文提出了一種基于正弦波的曲線升降扭控制策略,根據(jù)控制需求搭建TCU 控制系統(tǒng),建立仿真模型,并進行相應(yīng)的MIL/SIL/HIL 測試,驗證了TCU 控制模型的有效性和該換擋控制策略的可行性。通過臺架標(biāo)定實現(xiàn)了TCU 的相應(yīng)功能。結(jié)果表明,在相同油門踏板開度下,直線升降扭控制與基于正弦曲線升降扭控制的加速度變化率一致,且對應(yīng)的換擋時間相同,但基于正弦曲線升降扭控制可以有效減弱俯仰角變化,減小換擋沖擊度,提高換擋平順性。
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
