改進式軟硬件的四旋翼飛行器系統
2021-03-22 01:46:54劉順財施培植
綏化學院學報 2021年3期
劉順財 施培植
(1.福州理工學院計算與信息科學學院;2.福州理工學院移動通信和物聯網福建省高校工程研究中心福建福州 350014)
在空中飛行需要克服眾多因素,要克服地球的吸引力,以及保持旋轉慣力和空氣的阻力等。此外還需要考慮電池續航、飛行過程中的亂發亂竄等問題,這些都需要精密的算法與硬件結合。
一、系統方案
系統采用STM32F103為核心芯片,以MPU6050六軸傳感器的芯片作為測量角速率、加速度等主要裝置,遙控部分則通過NRF24L01(2.4G)線通信模塊實現遙控端和飛控端的數據傳輸,通過多個算法對數據進行處理,產生PWM波調速信號驅動空心杯電機,實現四旋翼飛行器的垂直運動,前后運動,側向運動,偏航運動,俯仰運動等運動,系統如圖1所示。
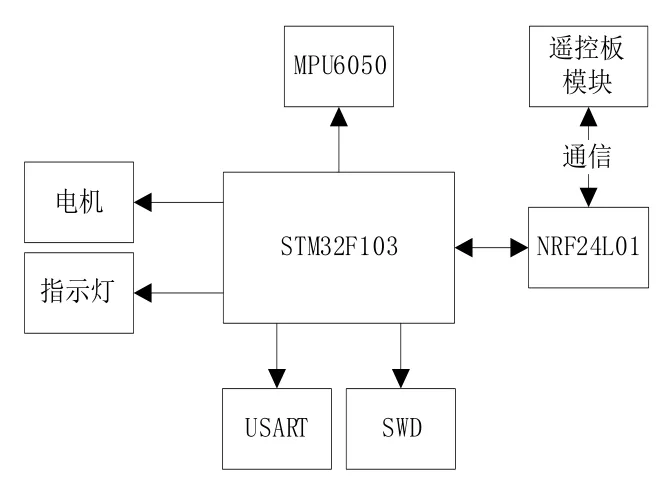
圖1 系統框架圖
(一)傳感器模塊。STM32F103C8T6有3個16位定時器,設置定時器成為4路用于捕獲/比較/PWM的功能通道,支持2個I2C接口、3個USART接口和2個SPI接口和DMA直接內存存取用于快速數據交換[1]。
MPU6050內置一個16位的ADC,能將三軸陀螺儀和三軸加速度計的數據轉換成數字量,編程高頻濾波器程序過濾不需要的信號,以提高系統穩定性。配置內部低通濾波器進行數據濾波。STM32以集成電路總線通信的方式與MPU6050通信,最高的數據傳輸速率可達400kHz。通過芯片內部的數字運動處理模塊DMP可減小MCU對于姿態融合運算的負荷。驅動IIC總線,對MPU6050的一系列寄存器進行初始化,再從中讀取數據。
(二)通信模塊。NRF24L01是一種傳輸效率高,損耗極低,能在低壓正常運行的射頻收發器。發射功率可配制成0dBm、-6dBm、-12dBm和-18dBm[2]。數據傳輸速率有兩種選擇分別為1Mbps和2Mbps,具有125個通信通道和6個數據通道,數據包每次可傳輸最多32個字節的數據,通信速率最高10Mbps。使用SPI接口設置輸出功率頻道和傳輸協議、工作頻率、傳輸速率、通信地址和數據包長度,可以通過IRQ引腳觸發MCU來判斷是否完成數據接收和發送。
二、四旋翼飛行器原理與硬件
(一)飛控板硬件電路。STM32F103C8T6、8M晶振和常規的電阻電容器件構成飛控板硬件。8M晶振可通過芯片內部PLL鎖相環倍頻電路將工作頻率提高到72M,以滿足四旋翼飛行器需要的運行速度。
電源電路采用3.7V的動力航模鋰電池,高于STM32工作電壓3.3V。為了能使飛行器更持久的飛行,需要充分利用完鋰電池的內部能量,設計先升壓再降壓的電路。升壓芯片為BL8530,該芯片采用47uH電感作為儲能元件。內部電路工作原理類似BOOST升壓電路,而SS34肖特基二極管充當續流二極管。3.3V穩壓電路采用662K穩壓芯片,為MCU和傳感器供電。飛行器在飛行過程中,電池電量會不斷下降。如果單純使用662K降壓電路,當電池電量低于3.3V時,穩壓芯片無法正常工作。采用先升壓電路,可為后級降壓電路提供較持久的電壓差,保證四旋翼飛行時間。電源電路如圖2所示。
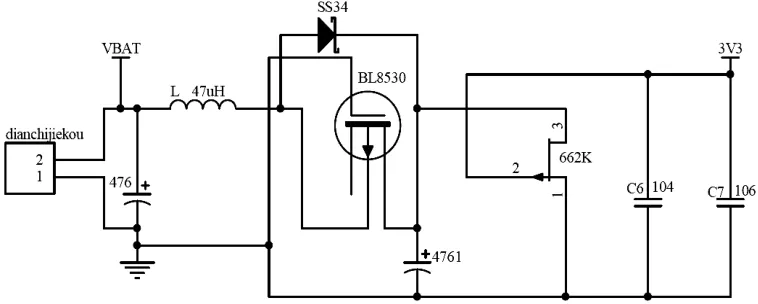
圖2 電源電路
電機采用的是8520空心杯電機,以PWM調速信號控制2302的nMOS管的導通,達到控制轉速。2302的開啟電壓是3.3V時,導通電流可達3A以上。假設8520空心杯電機的消耗電流為1A,導通瞬間電流以2倍正常工作電流來計算。MOS管的承受電流大于2A,所以2302可以滿足8520空心杯電機的正常工作。電路中100歐姆電阻起到限流作用,當MOS管導通瞬間,防止電流過大會加大MOS管負荷,縮短使用壽命。10K電阻的作用是當芯片復位時,IO口為浮空輸入狀態,IO電平受外界影響,故加上10K下拉電阻防止MOS管異常導通,使電機異常工作。104電容的作用是吸收電機產生的高頻干擾噪聲。電機驅動電路如圖3所示。
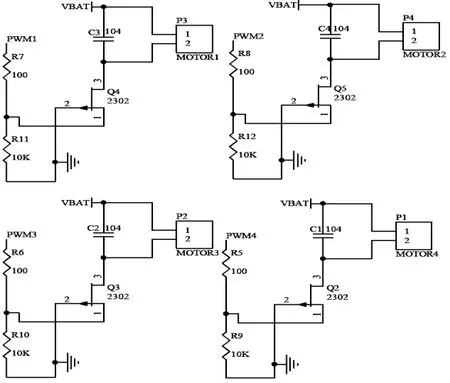
圖3 電機驅動電路
由于制板工藝所限,電路設計使用單面板,白線部分為飛線。在飛控板的PCB設計上耗費大量時間,多次修改并重新制作。在設計PCB時要解決當四個空心杯電機同時工作時,電流最大可達2A,必須合理地為電機驅動部分設計對地回路。當四個空心杯電機高速旋轉時,對飛控板產生的強度很大的電磁干擾,影響電路板上電子元器件的正常工作。NRF24L01(2.4G)無線通信模塊對印刷電路板的走線布局非常嚴格。模塊上的印刷天線附近不能存在走線。2.4G模塊對供電電源的純度要求嚴格,所以必須將模塊盡量靠近穩壓電源輸出,以保證供電電源的純凈和穩定。飛控板硬件電路PCB如圖4所示。
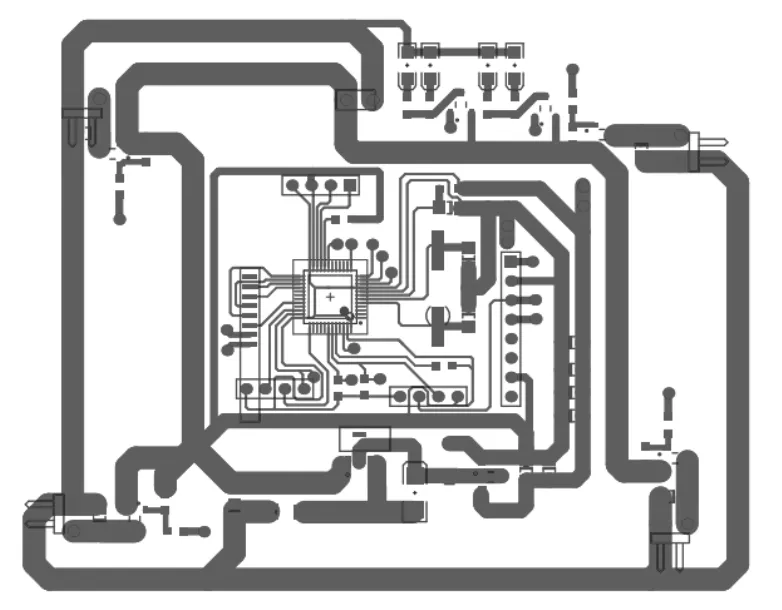
圖4 飛控板PCB
(二)遙控板硬件電路。遙控電路的最小系統電路跟飛控板的電路類似,也是8M晶振和電阻、電容元件。此外還添加了一個復位開關,當遙控設備與飛控設備通信異常的情況需要進行復位。
遙控電源供電部分采用的是MIC5219降壓芯片,將3.7V航模電池的電壓降壓為3.3V,以供MCU和傳感器使用。MIC5219是一種帶載能力強、輸出電流大、輸出電壓精度高、超低噪聲輸出、接近零關斷電流的電壓調節器。電路如圖5所示。
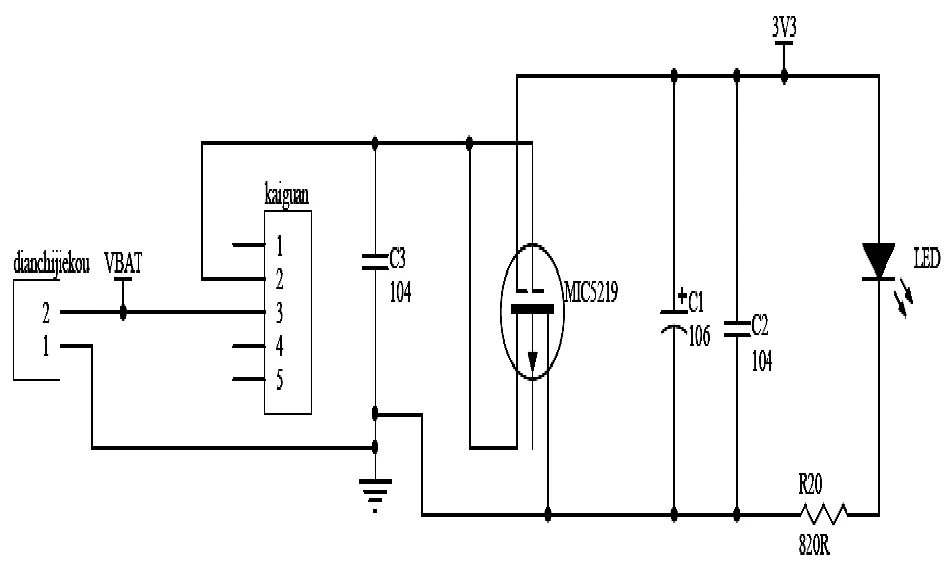
圖5 遙控板電源
搖桿電位器實質由滑動變阻器組合而成,通過STM32F103內部的ADC采樣電路采集兩個搖桿電位器的電阻分壓值,歸一化后轉換為油門控制值和姿態角控制值。
三、飛控與遙控軟件設計
系統初始化,包括IIC、SPI通信接口以及MPU6050、NRF24L01設備初始化。接收上位機發送過來的指令,用LED指示燈顯示系統當前的運行狀態。當進入中斷時,使用IIC通信接口讀取MPU6050數據,將讀取到的數據經過卡爾曼濾波算法程序,通過四元數姿態解算程序計算出當前的姿態信息。再通過PID算法對姿態數據進行控制,更新控制四個空心杯電機的PWM調速信號來調整四旋翼飛行器的姿態,飛行控制軟件包括姿態算法和姿態控制。
GPIO模擬IIC通信協議對MPU6050進行通信。GPIO初始化時配置為開漏輸出。在進行信道信息傳送時,數據引腳的數據必須在時鐘引腳高電平期間保持不變。在數據引腳的電位狀態變換的過程中,只有電位為0的時候才開始改變。起始信號由當時鐘線為高電平時,數據線由高電平向低電平切換。停止信號是當時鐘線是高電平時,數據發生從低電平到高電平的跳變。應答信號則是主控制器將數據線釋放(拉高),在響應時間要求內,從機將數據線拉低,表示一個有效的應答信號,若從機沒有將數據線拉低,則表示為非應答信號。軟件流程圖如圖6所示。
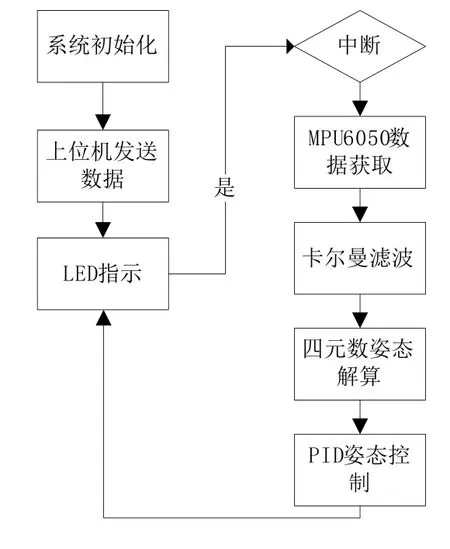
圖6 軟件流程圖
MPU6050設備的初始化:設置三軸陀螺儀采樣率為500Hz,設置低通濾波器頻率為42Hz,設置陀螺儀測量范圍為±2000deg/s,設置三軸加速度計測量范圍為±4G。
SMPLRT_DIV[7:0]是8位無符號數值。設置該數值將陀螺儀的輸出分頻,作為MPU6050的采樣頻率。傳感器的輸出、FIFO輸出以及DMP采樣都是基于這個采樣率數值。采樣完后鎖存器將復位到初始的FSYNC狀態。DLPF_CFG[2:0]是3位無符號數值,用來配置陀螺儀和加速度計的數字低通濾波器。
串行外設接口是單片機和外置設備之間的一種約定速率下的同步傳輸,發送和接收端都實時做數據交流。對NRF24L01初始化,設置通信頻段號,器件有125個頻段通道可供選擇。將通道設置為通道0,設置通信頻率,使能通道0的自動應答,設置通道0的接收地址和有效數據寬度,寫發送節點地址和接收節點地址,配置循環自動請求和最大限制重新發送請求頻率以及TX發送的傳輸數據。當NRF24L01發送或接收到數據時,會在外部中斷引腳產生一個低電平中斷,通過外部中斷引腳的狀態來判斷無線通信模塊當前收發數據的完成與否,然后將狀態標志位清除,繼續下一次通信。
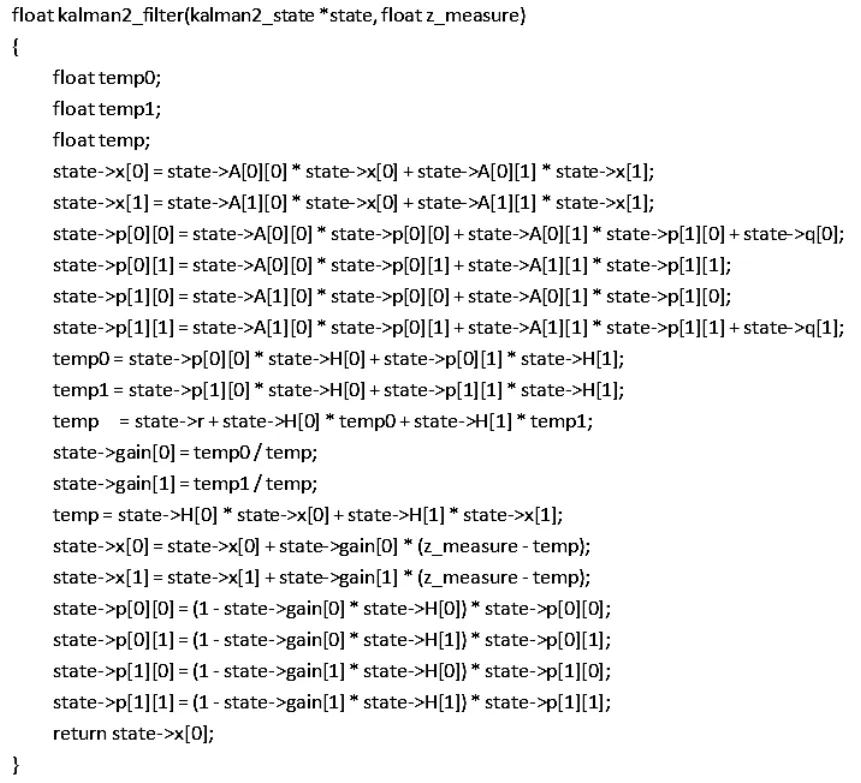
卡爾曼濾波是關于連續離散信號的遞歸濾波算法,卡爾曼濾波算法利用上個時刻的估算值和當前時刻的測量值來計算出下一刻的估計值。將卡爾曼濾波算法結合四旋翼飛行器進行闡述。如果想知道飛行器的一個姿態或速度等信息,就要從飛行器機架上的檢測裝置獲取。或者通過以牛頓慣性定律為原理的導航進行數學邏輯與語言構建的模型來運算。將兩個值通過計算優化后得到的優化值。通過將該優化值與數學模型計算出來的數值進行比較,就知道哪種途徑計算出來的數值更接近優化值。下次計算時,應該給予該途徑計算出的數值更大的權重,通過反復的計算,從而得到一個相對較為實際的數值。利用卡爾曼濾波算法進行濾波處理后可提高接收信號的準確性[3-5]。程序函數如下所示:
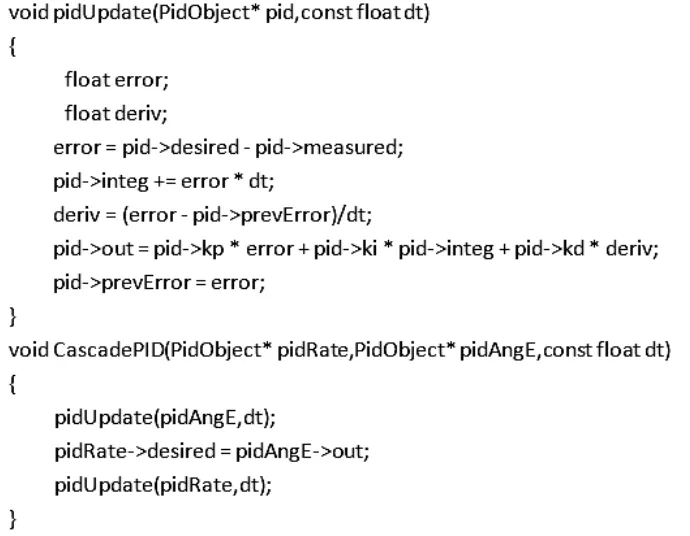
PID是基于數學的比例、積分、微分算法組成的反饋控制器。當發生誤差時,控制系統立即糾正誤差,并且在兩波之后姿態角將保持在穩定水平并最終返回到平衡位置。控制器把當前的數據和設定的參考數據進行比較,然后將差值用于新的計算輸入,最終使系統的輸出達到設定的目標值,P代表比例控制,I代表積分控制,D代表微分控制[6-8]。比例控制越大,對誤差的調節會過于猛烈,會使系統不穩定。如果比例調節較小,則誤差出現時,控制器的響應較慢,對誤差的修正力度較弱。積分控制會促使系統趨近設定值,消除單純只有比例控制的穩態誤差。積分控制量越大,趨近設定值的速度越快,但也有可能使反饋出現過沖的情況。微分控制是考慮未來誤差,計算誤差的變化率來對系統的改變做出反應[9-10]。微分的結果越大,表明系統對誤差能做出更加快速的反應。程序函數如下所示:
遙控軟件的功能是MCU采集搖桿電位器的四路電壓值轉換成控制指令,通過NRF24L01給飛行控制板發送指令,飛控板根據指令采取相應的動作。
四、系統整機調試
借助匿名科創地面站平臺對四旋翼飛行器進行調試。當前后、左右、上下移動時ACC-X、ACC-Y、ACC-Z都有相應的數據變化,表明加速度計正常工作。當飛行器朝3個軸向擺動時,會看到PITCH、ROLL、YAW的數據同步更新,代表陀螺儀正常工作。地面站中還有一個飛行器的模型能根據實際飛行器的姿態同步更新。借助該平臺來調試PID控制器中比例、積分、微分三個參數。在地面站寫入對四軸新的PID參數,設置不同的PID參數組合,從而使飛行器響應快又可較穩定的達到平衡。
(一)整機聯調。通過不斷地對PID參數進行調整,使四旋翼飛行器能夠較好地抵抗外接干擾,根據遙控指令作出響應并準確飛行。當系統未能使四旋翼飛行器垂直起飛,起飛時會有偏移現象存在,具體調試步驟如下:先調PITCH和ROLL的內環P。慢慢加大P,使得四旋翼飛行器能平穩起飛。然后繼續增大P,直到四旋翼飛行器開始輕微抖動。再把P值降低,使得四旋翼飛行器能平穩起飛。然后再加一點D值抑制振蕩。調節PITCH和ROLL的外環P。使P慢慢增大,會感覺四旋翼抑制偏移的力量越來越大,但是會有振蕩現象存在。此時一樣加入D抑制振蕩,再調節一下參數I就可以使四旋翼飛行器工作地較為流暢穩定。
在調節四旋翼飛行器的過程中,經常會出現通信突然異常,飛控板不受遙控控制,飛行器出現亂飛亂竄的現象。通過調試發現原因是空心杯電機高速旋轉時帶來的電磁干擾。為此重新設計飛控板PCB設計,對每一個電機的電流回路都做了相應的處理,使電機運轉產生的大電流有單獨的對地回路,并且增大對地回路的面積。而后又將NRF24L01無線通信模塊單獨通過飛線固定在板外。降低電機產生的電磁干擾影響。通過以上設置之后,后續的調試過程中,沒有產生通信異常等狀況,作品如圖7所示。

圖7 成品電路圖
五、結語
改進式軟硬件的四旋翼飛行器系統,實驗調試總結如下:
(一)如果利用直接3.3穩壓芯片的供電電路,隨著鋰電池低于3.3V時,系統因為辦法穩壓導致飛行器沒有辦法飛行。對比設計一個先升壓再降壓,并穩定3.3V的供電電壓,可以基本用完鋰電池的能量。
(二)如果不考慮高頻和地線線寬的布線,直接隨機等寬自動布線時,系統因為電流和電磁場的干擾導致飛控板不受遙控控制,飛行器出現亂飛亂竄的現象。對比按照高頻信號、抗電磁場和大電流的要求設計一個合理的PCB,基本上沒有在出現亂飛亂竄的現象。
(三)通過卡爾曼濾波算法進行濾波處理后可提高接收信號的準確性。
(四)通過在地面站寫入對四軸新的PID參數,設置不同的PID參數組合,從而使飛行器響應快又可較穩定的達到平衡。
