雙時(shí)間尺度下風(fēng)電主導(dǎo)的微電網(wǎng)頻率控制方法
2021-03-20 03:07:06趙熙臨
可再生能源 2021年3期
趙熙臨,吳 恒,付 波,查 冰,羅 維
(湖北工業(yè)大學(xué) 電氣與電子工程學(xué)院,湖北 武漢 430068)
0 引言
微電網(wǎng)能與大型電網(wǎng)并網(wǎng)運(yùn)行,也能進(jìn)行孤島運(yùn)行[1]。微電網(wǎng)的發(fā)展體現(xiàn)在大量分布式發(fā)電技術(shù)的靈活、高效應(yīng)用。這也意味著在系統(tǒng)調(diào)頻過程中,微電網(wǎng)須要各分布式電源盡量參 與 其 中[2]。
為追求風(fēng)能的最大化利用,傳統(tǒng)風(fēng)機(jī)通常是在最大功率點(diǎn)追蹤(Maximum Power Point Tracking,MPPT)方 式 下 運(yùn) 行,不 提 供 有 功 備 用[3]。然而,風(fēng)電機(jī)組里蘊(yùn)含著大量轉(zhuǎn)子動(dòng)能可參與到頻 率 波 動(dòng) 的 響 應(yīng)[4],[5],文 獻(xiàn)[6]根 據(jù) 頻 率 的 波 動(dòng) 在 短時(shí)間內(nèi)調(diào)節(jié)轉(zhuǎn)子轉(zhuǎn)速,以釋放大量動(dòng)能達(dá)到發(fā)電側(cè)與負(fù)荷側(cè)之間的功率平衡。文獻(xiàn)[7]通過調(diào)整槳距角改變風(fēng)能利用系數(shù),改變了雙饋感應(yīng)風(fēng)電機(jī)組(Doubly Fed Induction Generator,DFIG)的 功 率輸出,從而進(jìn)行電力系統(tǒng)調(diào)頻。文獻(xiàn)[8]通過調(diào)整槳距角的方法使DFIG參與到傳統(tǒng)電網(wǎng)中,但調(diào)頻任務(wù)仍為傳統(tǒng)火電機(jī)組主導(dǎo)。文獻(xiàn)[9]提出了一種在高風(fēng)速段采用轉(zhuǎn)速和槳距角配合的二次調(diào)頻控制策略。
微電網(wǎng)中風(fēng)電的輸出根據(jù)負(fù)荷的需求進(jìn)行調(diào)整、控制,不存在最大化利用問題。文獻(xiàn)[10]提出了在風(fēng)、光、柴、微電網(wǎng)中將虛擬慣性與槳距角控制相結(jié)合的一次調(diào)頻方法,提升了微電網(wǎng)的動(dòng)態(tài)穩(wěn)定性。文獻(xiàn)[11]考慮微電網(wǎng)特性,通過發(fā)揮風(fēng)電機(jī)組的調(diào)頻能力,來減輕同步發(fā)電機(jī)的調(diào)頻壓力。文獻(xiàn)[12]考慮到風(fēng)機(jī)參與虛擬慣性控制后,轉(zhuǎn)子轉(zhuǎn)速二次跌落的問題,通過加入儲(chǔ)能裝置和限定轉(zhuǎn)矩控制幫助轉(zhuǎn)子進(jìn)行轉(zhuǎn)速恢復(fù),有效增強(qiáng)了微電網(wǎng)頻率的動(dòng)態(tài)調(diào)節(jié)能力。文獻(xiàn)[13]通過控制風(fēng)電機(jī)組轉(zhuǎn)子轉(zhuǎn)速和調(diào)節(jié)槳距角預(yù)留備用容量,實(shí)現(xiàn)了一定程度的棄風(fēng),使風(fēng)電機(jī)組擁有了更大的調(diào)頻范圍。以上針對風(fēng)電參與微電網(wǎng)調(diào)頻的研究主要以一次調(diào)頻為主,無法消除頻率穩(wěn)態(tài)誤差,也沒有充分利用微電網(wǎng)中風(fēng)機(jī)槳距角的調(diào)整范圍來進(jìn)行風(fēng)電輸出較大幅度的控制。
本文以DFIG為例,根據(jù)風(fēng)機(jī)虛擬慣性與槳距角調(diào)整的互補(bǔ)性,在兩個(gè)時(shí)間尺度下對風(fēng)電機(jī)組進(jìn)行輸出控制,即充分利用虛擬慣性調(diào)節(jié)的快速性滿足短時(shí)間尺度下的調(diào)頻速度需求,以平抑短時(shí)波動(dòng);充分利用槳距角的調(diào)整范圍進(jìn)行輸出功率的較大幅度調(diào)整,以滿足負(fù)荷波動(dòng)產(chǎn)生的二次調(diào)頻需求。
1 電網(wǎng)調(diào)頻特性分析
典型的微電網(wǎng)調(diào)頻過程如圖1所示[14]。由圖1可知,當(dāng)頻率的波動(dòng)跨越過死區(qū)時(shí),系統(tǒng)響應(yīng)一次調(diào)頻過程時(shí)間約為40 s,其中慣性參與時(shí)間約為15 s,一次調(diào)頻時(shí)間尺度為秒級。當(dāng)該過程結(jié)束后,若頻率仍未恢復(fù)到標(biāo)準(zhǔn)范圍以內(nèi),且頻率偏差不滿足要求時(shí),系統(tǒng)將進(jìn)行二次調(diào)頻,以消除頻率誤差,二次調(diào)頻時(shí)間尺度為分鐘級。

圖1 微電網(wǎng)調(diào)頻過程Fig.1 Frequency adjustment process in microgrid
2 風(fēng)電的輸出控制方法
風(fēng)機(jī)功率輸出取決于槳距角、風(fēng)速等變量,其空氣動(dòng)力學(xué)模型為[15]
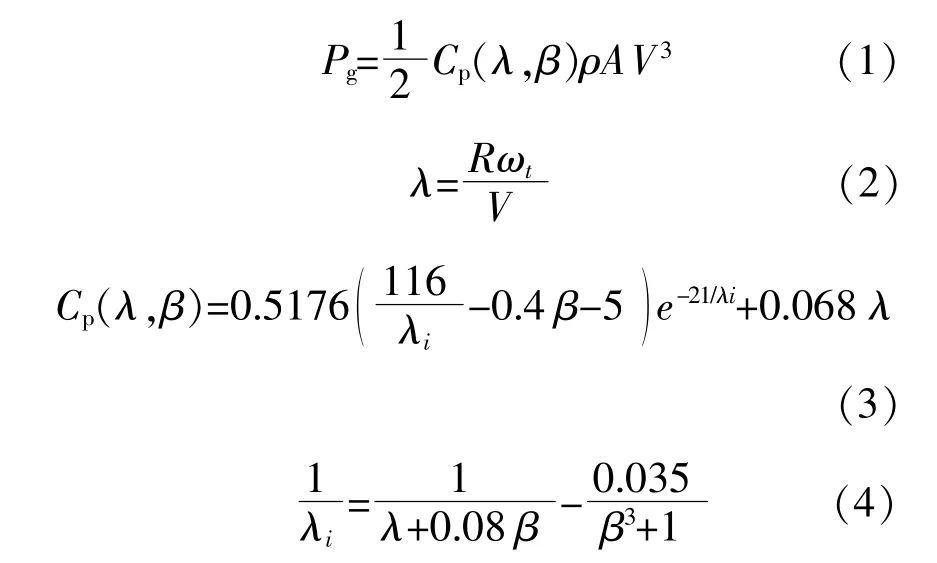
式中:Pg為風(fēng)機(jī)所捕獲的機(jī)械功率;Cp為風(fēng)能利用系數(shù);ρ為空氣密度;A為葉片的掃風(fēng)面積;V為風(fēng)速;β為槳距角;λ葉尖速比;ωt為風(fēng)力渦輪機(jī)轉(zhuǎn)速;R為葉片半徑。
2.1 風(fēng)機(jī)的虛擬慣性控制方法
虛擬慣性控制可在短時(shí)間內(nèi)釋放風(fēng)機(jī)轉(zhuǎn)子里存儲(chǔ)的動(dòng)能,以平抑負(fù)荷的波動(dòng)。當(dāng)頻率發(fā)生變化時(shí),風(fēng)機(jī)可釋放的功率為[10]

式中:H為發(fā)電機(jī)組慣性時(shí)間常數(shù);ωr為風(fēng)機(jī)轉(zhuǎn)子轉(zhuǎn)速;f為系統(tǒng)頻率。
風(fēng)機(jī)正常運(yùn)行時(shí)位于MPPT曲線上。以9 m/s的風(fēng)速為例,此時(shí)風(fēng)機(jī)運(yùn)行于點(diǎn)A,對應(yīng)轉(zhuǎn)速為ωrA,當(dāng)電網(wǎng)頻率發(fā)生跌落時(shí),風(fēng)機(jī)運(yùn)行點(diǎn)首先來到點(diǎn)B,隨后到達(dá)點(diǎn)C,此時(shí)轉(zhuǎn)速為 ωrC。在提取出動(dòng)能進(jìn)行響應(yīng)負(fù)荷波動(dòng)后,轉(zhuǎn)子轉(zhuǎn)速開始加速,逐漸恢復(fù)至 ωrA,風(fēng)機(jī)重新運(yùn)行到工作點(diǎn)A。同樣,如果電網(wǎng)中頻率增大,則風(fēng)機(jī)的有功功率基準(zhǔn)按照路徑A-D-E-A運(yùn)行,風(fēng)機(jī)虛擬慣性控制運(yùn)行曲線如圖2所示。
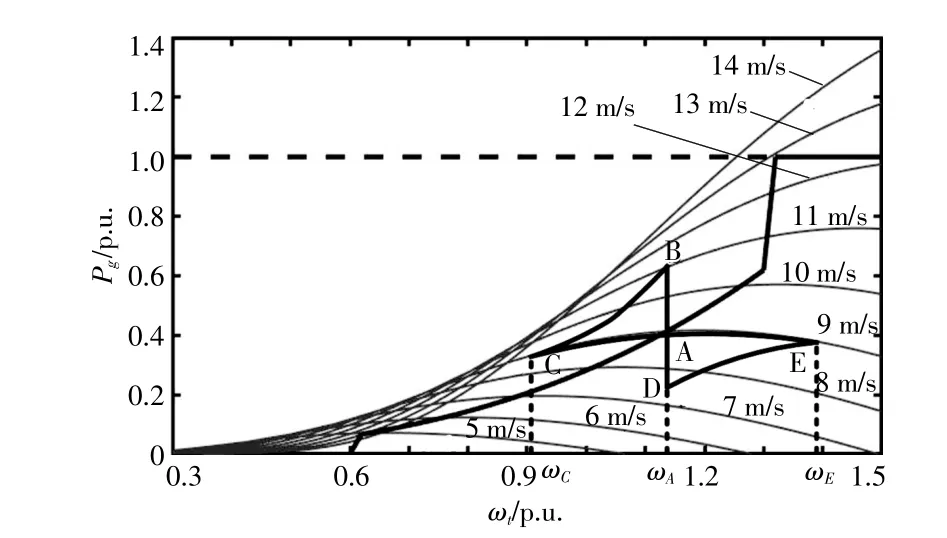
圖2 風(fēng)機(jī)虛擬慣性運(yùn)行曲線Fig.2 Operation curve of wind turbine in virtual inertia
2.2 風(fēng)機(jī)的變槳距角控制方法
調(diào)整風(fēng)機(jī)的槳距角可以改變風(fēng)機(jī)捕獲的機(jī)械功率。槳距角控制是利用風(fēng)機(jī)減載運(yùn)行,以留有一定的槳距角裕度,使風(fēng)機(jī)能通過調(diào)整槳距角來響應(yīng)負(fù)荷波動(dòng)的方法,如圖3所示。
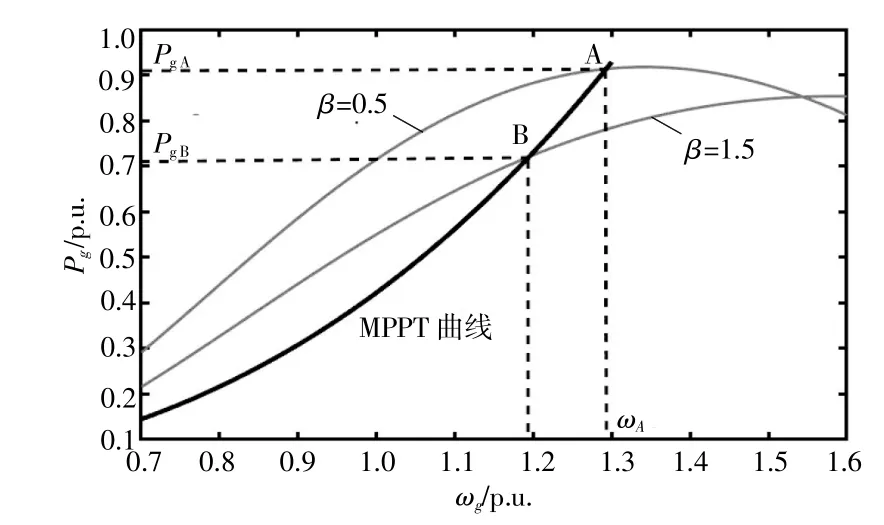
圖3 風(fēng)機(jī)減載運(yùn)行曲線Fig.3 De-loading operation curve of wind turbine
當(dāng)槳距角響應(yīng)微電網(wǎng)系統(tǒng)頻率變化的信號(hào)Δf后,風(fēng)機(jī)的運(yùn)行點(diǎn)從A點(diǎn)到B點(diǎn),隨之風(fēng)機(jī)的輸出功率由PgA變?yōu)镻gB。
風(fēng)機(jī)通過調(diào)整槳距角參與二次調(diào)頻的控制如圖4所示。圖中:β0為初始預(yù)留的槳距角;風(fēng)機(jī)從外部引入 Δf,通過PI控制器對槳距角執(zhí)行器提供額外的槳距角信號(hào) Δβ,從而改變風(fēng)機(jī)輸出[16]~[18]。
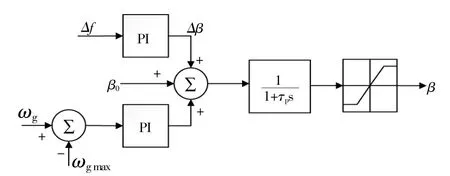
圖4 槳距角控制框圖Fig.4 Control block diagram of pitch angle
3 風(fēng)機(jī)參與微電網(wǎng)頻率控制策略設(shè)計(jì)
3.1 雙時(shí)間尺度下風(fēng)電參與微電網(wǎng)調(diào)頻構(gòu)想
虛擬慣性控制響應(yīng)速度快,但維持時(shí)間短;槳距角控制涉及機(jī)械調(diào)整,投入時(shí)間較長[17],[18]。這兩種風(fēng)機(jī)輸出的控制方式在時(shí)間尺度上正好與電網(wǎng)一、二次調(diào)頻特征契合,如圖5所示。
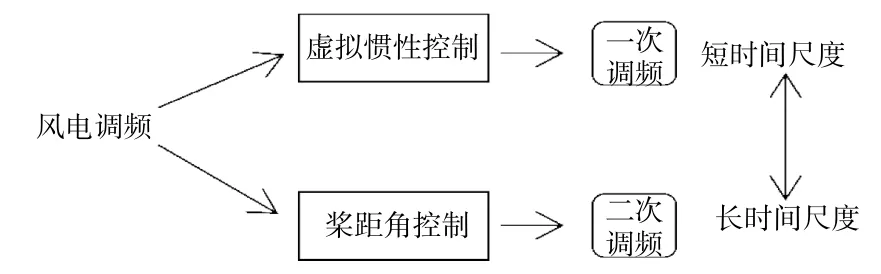
圖5 雙時(shí)間尺度風(fēng)電頻率控制示意圖Fig.5 Schematic diagram of dual time scale wind power frequency control
在風(fēng)機(jī)參與的微電網(wǎng)調(diào)頻中,可將負(fù)荷波動(dòng)事件按照發(fā)生時(shí)間的長短,區(qū)分為短時(shí)間尺度事件和長時(shí)間尺度事件,不同的時(shí)間尺度對應(yīng)風(fēng)機(jī)不同的頻率控制方式。①短時(shí)間尺度:在負(fù)荷波動(dòng)發(fā)生40 s內(nèi)。通過虛擬慣性控制進(jìn)行調(diào)頻,發(fā)揮其在短時(shí)間尺度上快速響應(yīng)的特性,以平抑負(fù)荷的短時(shí)波動(dòng)。②長時(shí)間尺度:在負(fù)荷波動(dòng)發(fā)生40 s后。通過槳距角控制進(jìn)行調(diào)頻,考慮其涉及到機(jī)械環(huán)節(jié),所以響應(yīng)時(shí)間相對慣性而言較長,但其調(diào)頻范圍更大,并且能參與到二次調(diào)頻。組合使用二者在不同時(shí)間尺度的控制特性,可以有效提升系統(tǒng)調(diào)頻適應(yīng)能力。同時(shí),考慮到當(dāng)負(fù)荷需求過大時(shí),進(jìn)行槳距角與虛擬慣性相結(jié)合的風(fēng)機(jī)輸出控制方式可能仍無法滿足微電網(wǎng)負(fù)荷頻率的控制需求,此時(shí),可啟動(dòng)柴油機(jī)參與到微電網(wǎng)的二次調(diào)頻過程中。
3.2 虛擬慣性與槳距角互補(bǔ)控制方法
虛擬慣性控制為響應(yīng)頻率的變化率,轉(zhuǎn)子可以在短時(shí)內(nèi)釋放大量的動(dòng)能,能有效延緩負(fù)荷突變時(shí)頻率達(dá)到最低值的時(shí)間,從而為微電網(wǎng)提供頻率支撐。然而,由于DFIG本身特性所致,在短暫的支撐之后,會(huì)出現(xiàn)轉(zhuǎn)子轉(zhuǎn)速二次跌落的現(xiàn)象,直至轉(zhuǎn)速完全恢復(fù)。在此時(shí)間內(nèi),槳距角的調(diào)整將改變風(fēng)機(jī)捕獲的機(jī)械功率,釋放備用功率。這部分功率不僅注入微電網(wǎng)中進(jìn)行二次調(diào)頻,并且能將轉(zhuǎn)子轉(zhuǎn)速快速恢復(fù)至穩(wěn)定狀態(tài)。所以綜合了虛擬慣性控制和槳距角控制的微電網(wǎng)調(diào)頻方法,不僅有效解決了轉(zhuǎn)子在釋放動(dòng)能后的二次跌落問題,而且能減小動(dòng)態(tài)頻率偏差。
頻率控制流程圖如圖6所示。以風(fēng)光柴微電網(wǎng)系統(tǒng)為例的系統(tǒng)結(jié)構(gòu)如圖7所示[4]。

圖6 風(fēng)光柴微電網(wǎng)頻率控制流程圖Fig.6 Wind photovoltaic diesel microgrid frequency control flow diagram

圖7 風(fēng)光柴微電網(wǎng)頻率控制框圖Fig.7 Wind photovoltaic diesel microgrid frequency control block diagram
由圖6,7可知,光伏不參與微電網(wǎng)調(diào)頻,外界環(huán)境對其輸出功率的影響等效后疊加到負(fù)荷擾動(dòng) ΔPd中。風(fēng)機(jī)虛擬慣性控制將系統(tǒng)頻率變化率df/dt作為輸入變量,在短時(shí)間尺度上響應(yīng)系統(tǒng)頻率變化。當(dāng)微電網(wǎng)受到負(fù)荷擾動(dòng)產(chǎn)生頻率變化時(shí),DFIG的有功功率參考值隨之改變,有功功率通過速度控制器、機(jī)側(cè)換流器使電磁功率Tem變化,而這部分增加的電磁功率是來自釋放的轉(zhuǎn)子動(dòng)能。另一方面,DFIG從外部引入頻率偏差信號(hào)Δf到PI控制器,對槳距角執(zhí)行器提供額外的槳距角偏差信號(hào)Δβ,調(diào)整風(fēng)力輪機(jī)的葉片槳距角,從而實(shí)現(xiàn)風(fēng)機(jī)跟蹤頻率變化改變風(fēng)機(jī)有功輸出的效果,在長時(shí)間尺度上完成二次調(diào)頻。當(dāng)槳距角已調(diào)整至0°(風(fēng)機(jī)滿額輸出)仍無法滿足負(fù)荷需求時(shí),啟動(dòng)柴油機(jī)模塊,參與到微電網(wǎng)的二次調(diào)頻中。
4 仿真分析
仿真分析基于Matlab/Simulink搭建如圖8所示模型。將本文所提方案與純槳距角二次調(diào)頻、槳距角與虛擬慣性共同參加的一次調(diào)頻作對比,以驗(yàn)證所提方法的有效性。微電網(wǎng)包括柴油機(jī)、光伏電池和風(fēng)電機(jī)組等3種電源。風(fēng)機(jī)采用Vestas 5 MW雙饋感應(yīng)式發(fā)電機(jī);柴油機(jī)組額定輸出功率2 MW;光伏最大輸出功率2 MW,風(fēng)速為10 m/s,預(yù)留槳距角為5°。
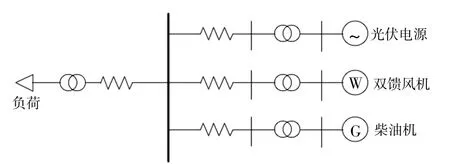
圖8 微電網(wǎng)系統(tǒng)結(jié)構(gòu)Fig.8 Microgrid system schematic
風(fēng)機(jī)和柴油機(jī)參數(shù)分別見表1,2。
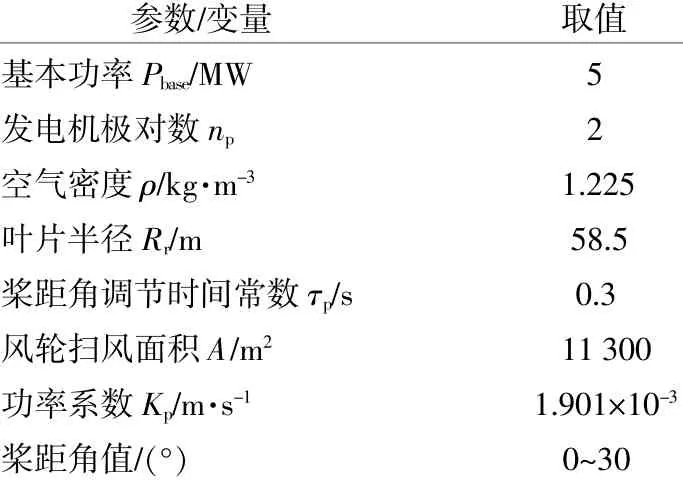
表1 風(fēng)機(jī)參數(shù)表Table 1 Wind turbine parameters

續(xù)表1
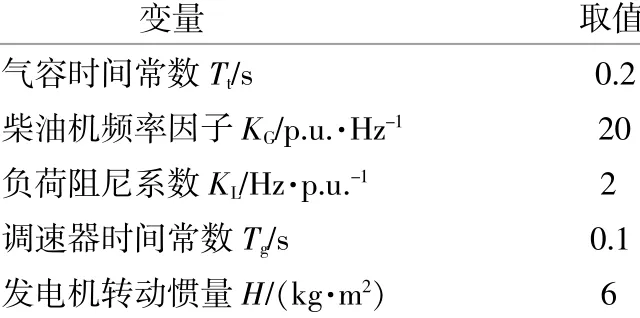
表2 柴油機(jī)參數(shù)表Table 2 Diesel parameters
(1)無柴油機(jī)參與微電網(wǎng)小負(fù)荷需求時(shí)
在微電網(wǎng)負(fù)荷需求較小時(shí),風(fēng)、光功率輸出足以滿足負(fù)荷需求,此時(shí),柴油機(jī)不參與微電網(wǎng)供能。負(fù)荷的隨機(jī)波動(dòng)大小如圖9所示。系統(tǒng)及風(fēng)機(jī)仿真結(jié)果如圖10~12所示。
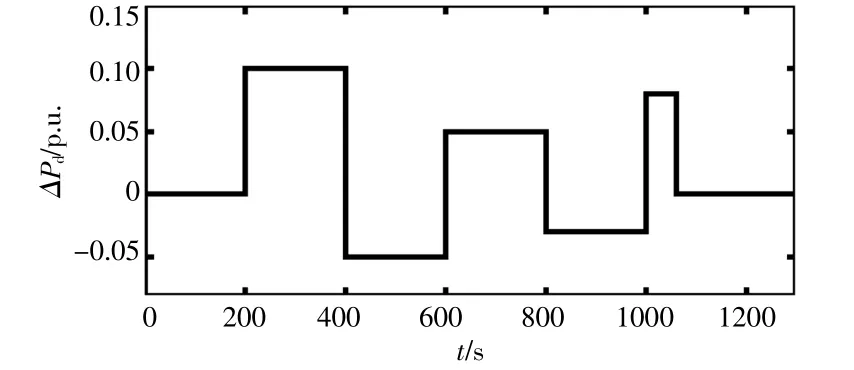
圖9 微電網(wǎng)負(fù)荷波動(dòng)Fig.9 Microgrid load fluctuations

圖10 微電網(wǎng)頻率變化圖Fig.10 Microgrid frequency change figure
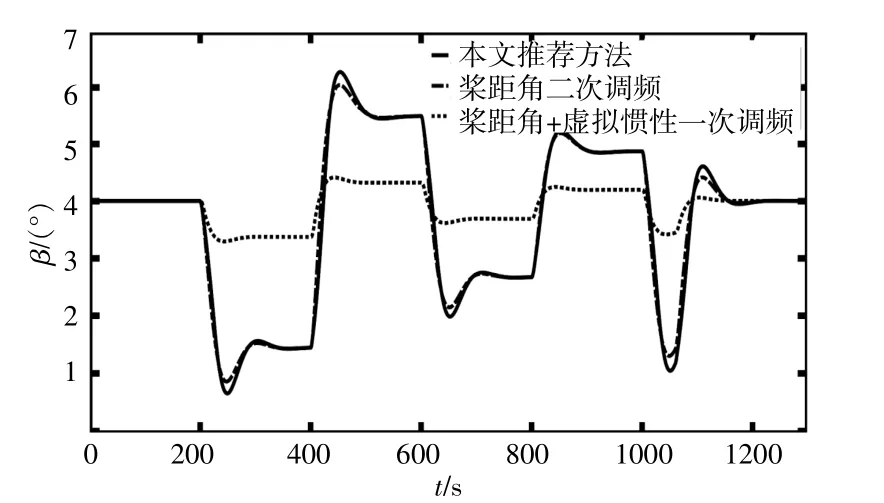
圖11 槳距角變化圖Fig.11 Pitch angle change figure
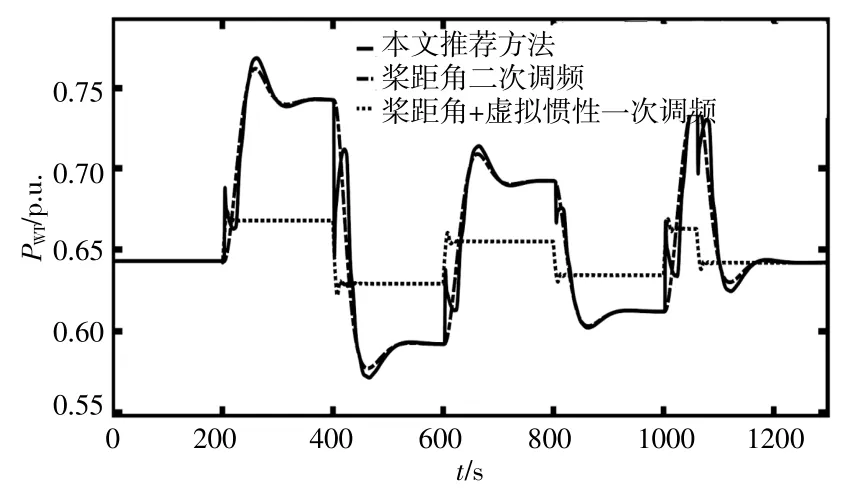
圖12 風(fēng)機(jī)有功輸出變化曲線Fig.12 Active power output curve of wind turbine
由圖10可知,與單純的槳距角控制二次調(diào)頻相比,本文所提方案在負(fù)荷波動(dòng)初期頻率變化更平緩。這是由于所提方案在考慮短時(shí)間尺度下引入風(fēng)機(jī)慣性控制,對負(fù)荷波動(dòng)引起的頻率變化有了一個(gè)短期的支撐。相比虛擬慣性和槳距角在一次調(diào)頻的結(jié)合使用,本文所提方法消除了頻率穩(wěn)態(tài)上的誤差。由圖11可知,負(fù)荷發(fā)生波動(dòng)時(shí)刻,與虛擬慣性和槳距角在一次調(diào)頻的結(jié)合相比,本文所提方案在風(fēng)機(jī)槳距角和輸出功率的變化上更大,擴(kuò)大了風(fēng)機(jī)調(diào)頻范圍。與槳距角控制的二次調(diào)頻相比,本文所提方案的槳距角變化幅度略大,這是由于槳距角控制在長時(shí)間尺度上對風(fēng)機(jī)轉(zhuǎn)子恢復(fù)提供的能量所導(dǎo)致。由圖12可知,由于轉(zhuǎn)子提取了大量動(dòng)能作為頻率支撐,風(fēng)機(jī)輸出功率在負(fù)荷需求變化瞬間有更大的變化。
(2)柴油機(jī)參與微電網(wǎng)大負(fù)荷需求時(shí)
當(dāng)微電網(wǎng)遭遇大負(fù)荷需求時(shí),風(fēng)、光滿額輸出也無法滿足負(fù)荷需求,僅根據(jù)風(fēng)機(jī)的二次調(diào)頻已無法消除穩(wěn)態(tài)誤差,此時(shí)啟動(dòng)柴油機(jī)發(fā)電。假設(shè)當(dāng) 微 電 網(wǎng) 在300 s增 加0.2 p·u·的 負(fù) 荷,頻 率 響應(yīng)曲線如圖13所示。風(fēng)機(jī)仿真結(jié)果如圖14,15所示。
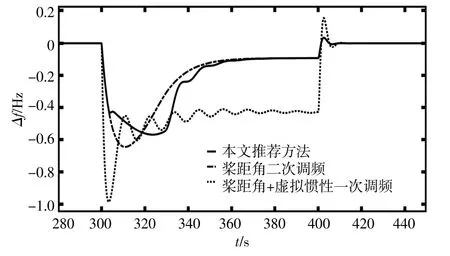
圖13 微電網(wǎng)頻率變化圖Fig.13 Microgrid frequency change figure
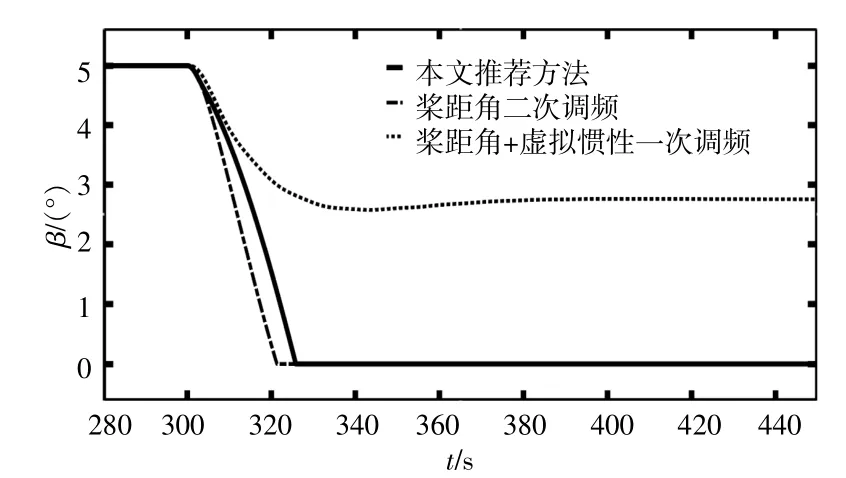
圖14 槳距角變化圖Fig.14 Pitch angle change figure
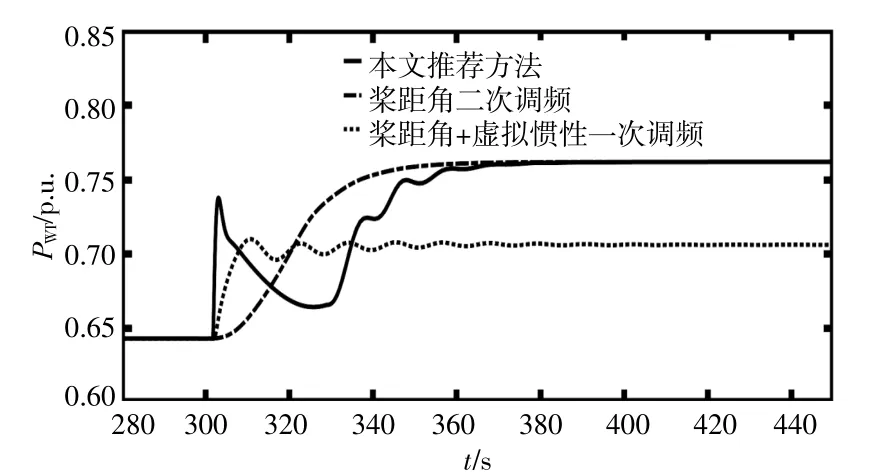
圖15 風(fēng)機(jī)有功輸出變化曲線Fig.15 Active power output curve of wind turbine
由圖13,14可知,當(dāng)負(fù)荷需求增長較大時(shí),本文所提方法相比虛擬慣性和槳距角結(jié)合的一次調(diào)頻,頻率穩(wěn)態(tài)誤差偏差更小,槳距角的調(diào)整幅度更大,風(fēng)機(jī)的輸出功率也更高,最大程度地利用了風(fēng)電參與到調(diào)頻中。由圖13,15可見,與純槳距角二次調(diào)頻相比,本文方案的動(dòng)態(tài)頻率偏差更小,風(fēng)機(jī)功率輸出在負(fù)荷需求發(fā)生的瞬間就得到了迅速提升。由于風(fēng)機(jī)已達(dá)到該風(fēng)速下的最大輸出,穩(wěn)態(tài)誤差仍然存在,柴油機(jī)隨后在約400 s處啟動(dòng),參與到微電網(wǎng)的二次調(diào)頻,以消除系統(tǒng)的穩(wěn)態(tài)誤差。
5 結(jié)論
針對分布式發(fā)電單元在微電網(wǎng)調(diào)頻中的參與問題,本文提出了一種雙時(shí)間尺度下風(fēng)電主導(dǎo)的微電網(wǎng)負(fù)荷頻率控制方法,通過理論分析與仿真驗(yàn)證,得出如下結(jié)論。
①采用風(fēng)電虛擬慣性與槳距角控制相結(jié)合的方法,即虛擬慣性參與電網(wǎng)一次調(diào)頻,槳距角控制參與電網(wǎng)二次調(diào)頻,能夠使風(fēng)電輸出控制特性在時(shí)間尺度上與電網(wǎng)一次、二次調(diào)頻特性相契合。
②當(dāng)風(fēng)、光的功率輸出滿足負(fù)荷需求,所提方法不僅能消除系統(tǒng)的穩(wěn)態(tài)頻率偏差,而且在短時(shí)間尺度內(nèi)加入虛擬慣性使微電網(wǎng)獲得更好地控制動(dòng)態(tài)頻率偏差。
③當(dāng)風(fēng)、光的功率輸出不能滿足負(fù)荷需求,須要柴油機(jī)參與時(shí),本文所提方法可以使風(fēng)機(jī)最大限度地參與調(diào)頻,并減少微電網(wǎng)動(dòng)態(tài)頻率偏差。