無人機傾斜攝影測量在海外公路勘測中的應用
2021-03-17 07:41:10王永杰
科學技術創(chuàng)新 2021年5期
王永杰
(中鐵十四局集團海外分公司,山東 濟南250014)
1 概述
近年來,我國無人機傾斜攝影測量技術發(fā)展迅猛,相比于傳統(tǒng)測量技術,無人機航測技術具有快速高效、機動靈活、分辨率高、處理速度快、運行成本低等特點,厄瓜多爾瓜蘭達公路項目參照我國無人機航測技術標準,采用無人機傾斜攝影測量技術進行航測公路地形圖,取得了良好的勘測成果。
2 工程概況及無人機系統(tǒng)簡介
2.1 厄瓜多爾瓜蘭達公路概況
瓜蘭達市繞城快速通道公路項目位于南美洲厄瓜多爾玻利瓦爾省瓜蘭達市,起點位于瓜努霍市,終點與通往欽博鎮(zhèn)的491 國道相連,線路全長13.29 千米,采用雙向兩車道,設計時速80 公里/小時,路基寬度17.3m,設計荷載為一級公路,計劃于2023 年建成通車。
2.2 無人機航測系統(tǒng)簡介
(1)無人機飛行平臺: 瓜蘭達公路地形航測采用的無人機型號為大疆PHANTOM 4PRO 無人機,機身采用四旋翼結構。(2)無人機的導航控制系統(tǒng):無人機的導航控制系統(tǒng)采用DJI Guidance 導航系統(tǒng),Guidance 具有視覺里程計、避障、RGBD 等多個功能。(3)無人機攝影及地面面站系統(tǒng):本項目采用的大疆PHANTOM 4PRO 攝影系統(tǒng)由一臺2000 萬像素單鏡頭相機和一個三軸云臺組成,地面站系統(tǒng)采用大疆PHANTOM 4PRO 一體遙控器,最大信號遙控距離為8km。
3 無人機傾斜攝影測量應用
3.1 無人機傾斜攝影測量外業(yè)流程圖
無人機傾斜攝影測量主要分為外業(yè)飛行拍攝及內(nèi)業(yè)數(shù)據(jù)處理兩個部分。其中外業(yè)拍攝流程圖如圖1。
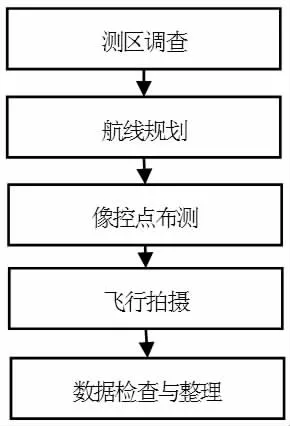
圖1 無人機航測外業(yè)拍攝流程圖
3.2 測區(qū)調(diào)查
瓜蘭達公路項目航測區(qū)域位于瓜蘭達市東南角,屬山地地貌,沿線路里程K5+900 至K6+900。該區(qū)域地勢較為復雜,線路左側有塊一山地,相對高度約為150m。由于測區(qū)位于當?shù)匾簧鐓^(qū)處,范圍內(nèi)存在多處農(nóng)田、民房及果園等。根據(jù)工程實際要求,需對測區(qū)內(nèi)地形地貌、民房建筑面積及鄉(xiāng)間公路位置等多個數(shù)據(jù)進行測量,測圖精度要求為1:2000。
3.3 測區(qū)航線規(guī)劃
(1)無人機航線規(guī)劃要滿足以下要求:①航線規(guī)劃須按照略高于地形圖所需的分辨率進行設計。②航線須完整覆蓋整個航拍區(qū)域,并適當進行外擴。③參照無人機續(xù)航速度、巡航時間及遙控信號是否存在遮擋等參數(shù)進行規(guī)劃飛行航線。④航線規(guī)劃前需對當?shù)亟w區(qū)及限飛區(qū)域進行查詢,如需在此區(qū)域內(nèi)航測,須提前向當?shù)卣暾堖M行解禁。(2)通過對瓜蘭達公路測區(qū)實地踏勘,決定將無人機起飛點設置于測區(qū)東北山坡之上,以確保整個測區(qū)遙控信號沒有遮擋,航線采用3D“井”字型航線。根據(jù)地形圖精度要求,地面分辨率為5cm,航高計算公式如下:

式中:
h- 飛行高度;
f- 鏡頭焦距(大疆精靈4pro 鏡頭焦距為8.8mm);
a- 像元尺寸(大疆精靈4pro 像元尺寸為2..41228μm);
GDS- 地面分辨率(5cm)。
按照上式計算,當?shù)孛娣直媛蕿?cm 時,無人機相對行高為182m,當相對行高120m 時,獲得的影像照片GDS 約為3.3cm。綜合考慮瓜蘭達公路無人機航測相對高度取150m。航向重疊率為80%,旁向重疊率為65%,飛行架次劃分為4 次。
3.4 像控點布測
3.4.1 像控點布設原則
(1)像控點布設要在整個測區(qū)均勻分布,選點要盡量選擇固定、平整、清晰易識別、無陰影、無遮擋的區(qū)域。(2)可以利用斑馬線直角點、地面直角點;設置后注意及時拍照標記。(3)像控點標志可做成“L”型或“十”,為提高精度,當布置成“十”字型時,應在“十”字中心噴涂直徑為5cm 的圓點,當布置成“L”字型時,應統(tǒng)一測內(nèi)角或者外角,如圖2 所示。(4)針對帶狀測區(qū),布點需要在帶狀的左右側布點,按照“S”字型路線布點。
3.4.2 像控點預設
為提高航測效率,可在外出作業(yè)之前,預設擬布像控點位置。首先對前期收集測區(qū)相關的現(xiàn)有地形圖、影像資料及測區(qū)范圍等資料進行核查,做出像控點布置計劃。在對現(xiàn)場實地踏勘時,了解測區(qū)地形情況,從而對像控點布設位置進行調(diào)整確認。同時可將像控點布置位置制成KLM文件,通過谷歌地圖或奧維地圖等,可快速找到像控點預設位置,從而提高布點工效。
3.4.3 布測像控點
瓜蘭達公路項目航測區(qū)位于山地區(qū)域,考慮地形圖精度要求,像控點布置間距為200m,形狀為“L”型標志,采用噴繪進行布置,布設完成后及時使用RTK 測量像控點地理信息,本項目測區(qū)像控點詳細布置位置如圖2 所示。

圖2 像控點布置圖
3.5 無人機飛行拍攝
無人機航測宜選擇晴天,不宜在太陽猛烈的天氣拍攝,強烈的陽光會導致建筑墻面曝光過度,也不宜在陰天拍攝,陰天光線較弱,會導致曝光不足。在無風多云的天氣,天空較亮,光線漫反射,此時拍攝效果最佳。起飛場地宜選擇平坦的空地或者寬闊的道路,周圍無高壓線、高層建筑、及信號塔等。本工程無人機控制系統(tǒng)為大疆PHANTOM 4PRO 一體式遙控器,通過地面控制系統(tǒng),無人機按照規(guī)劃完成的航線進行作業(yè)。瓜蘭達公路測區(qū)共計拍攝照片4500 多張,航測完成后及時檢查整理拍攝照片、像控點測量成果、pos 數(shù)據(jù)及GNS 坐標等數(shù)據(jù)文件,經(jīng)過整理的外業(yè)數(shù)據(jù)分門別類進行統(tǒng)一存放,歸檔保存。
3.6 無人機傾斜攝影測量內(nèi)業(yè)數(shù)據(jù)處理

圖3 無人機航測內(nèi)業(yè)處理流程圖
(1)本工程采用ContextCapture 軟件對外業(yè)數(shù)據(jù)進行處理。將航拍照片及POS 數(shù)據(jù)導入ContextCapture 軟件進行空三加密,通過導入光學參數(shù)對鏡頭畸變進行修正,通過控制點進行刺點,每個相控點至少要刺兩張照片。采用DP-Modeler 進行三維測圖生成DLG 成果。基本流程如圖3 所示。(2)空三計算過程的注意事項。空三加密是三維建模的關鍵步驟,是重中之重的環(huán)節(jié),同樣也是最容易出問題的環(huán)節(jié)。在內(nèi)業(yè)處理過程中,經(jīng)常出現(xiàn)空三運算不通過以及出現(xiàn)卷曲或斷裂現(xiàn)象,為避免以上情形發(fā)生,須注意以下幾個事項:①空三計算之前,須導入相機出廠畸變參數(shù),從而對照片進行修正。②對于較大區(qū)域的三維建模,建議進行分區(qū)空三計算,可大大增加空三成果率。③如果ContextCapture 效果不佳,可考慮采用Photoscan 進行空三計算。
4 航測成果及誤差分析
4.1 無人機航測成果
通過內(nèi)業(yè)數(shù)據(jù)處理后,瓜蘭達公路航測區(qū)域快速獲得測量成果,包括TDOM(真正射影像圖)、實景三維模型及DLG(數(shù)字劃線圖)等。

圖4 瓜蘭達公路航測區(qū)域TDOM(真正射影像圖)
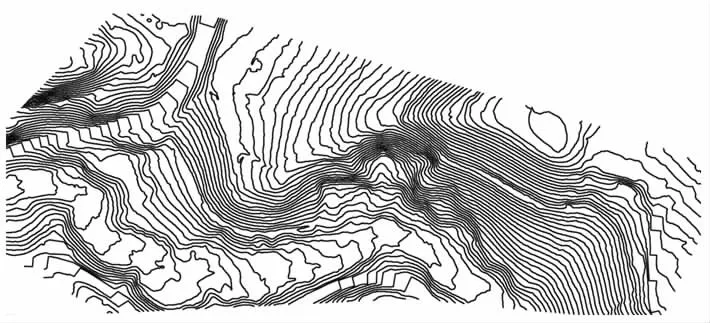
圖5 瓜蘭達公路航測區(qū)域DLG(部分)
4.2 航測成果精度分析
測區(qū)共布置30 個檢查點,經(jīng)過分析,80.6%的檢查點高程絕對誤差小于5.5cm,其中最大高程誤差為9.3cm,最小高程誤差為0.8cm,86.1%的檢查點平面位置誤差小于9.5cm,最大平面位置誤差為11.6cm,最小平面位置誤差為4.7cm。根據(jù)我國測繪行業(yè)標準化指導性技術文件《低空數(shù)字航空攝影測量內(nèi)業(yè)規(guī)范》要求,1:2000 地形圖平面位置誤差不大于1.2m,高程誤差不大于1.0m。瓜蘭達公路無人機航測檢查點平高誤差遠遠滿足國家規(guī)范的精度要求。
5 結論
厄瓜多爾瓜蘭達公路無人機航測的應用是在海外公路勘測方向的一次新探索,通過應用我國先進測量技術,極大節(jié)省了厄瓜多爾瓜蘭達公路勘測的人力物力,明顯提高了勘測效率,有力推動了我國技術標準走向海外,也為海外類似工程提供了有效參考。
猜你喜歡
商品與質(zhì)量(2021年43期)2022-01-18 05:31:32
石油瀝青(2021年4期)2021-10-14 08:50:40
人民交通(2019年16期)2019-12-20 07:04:10
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公路(2017年12期)2017-02-06 03:07:33
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
