激光尋的空地導(dǎo)彈制導(dǎo)控制方法
2021-03-16 06:33:04鄒汝平陳士超陳韻張建靈
兵工學(xué)報(bào) 2021年1期
鄒汝平, 陳士超, 陳韻, 張建靈
(中國(guó)兵器工業(yè)第203研究所 第一總體部, 陜西 西安 710065)
0 引言
制導(dǎo)控制是導(dǎo)彈實(shí)現(xiàn)安全發(fā)射、穩(wěn)定飛行與目標(biāo)精確打擊的核心環(huán)節(jié),其導(dǎo)引和控制導(dǎo)彈按照預(yù)定彈道規(guī)律飛行,高精度命中與毀傷目標(biāo),制導(dǎo)控制性能直接決定了空地導(dǎo)彈的作戰(zhàn)使用效能[1-2]。導(dǎo)彈的制導(dǎo)控制系統(tǒng)包括尋的制導(dǎo)和遙控制導(dǎo)兩種基本類型[3]。遙控制導(dǎo)雖然彈上裝置較為簡(jiǎn)單,但當(dāng)導(dǎo)彈射程較遠(yuǎn)時(shí),制導(dǎo)精度將會(huì)變差。尋的制導(dǎo)的制導(dǎo)系統(tǒng)全部裝于彈上,具有較高的制導(dǎo)精度,已成為近年來(lái)最重要的制導(dǎo)體制。美國(guó)“捕食者”等察打一體無(wú)人機(jī)掛載的AGM-114系列空地導(dǎo)彈是典型的尋的制導(dǎo)空地導(dǎo)彈[4-5]。
不同制導(dǎo)體制的技術(shù)特點(diǎn)不盡相同,作戰(zhàn)使用方式各異,相互之間性能互補(bǔ)[6-8]。與其他制導(dǎo)體制相比,激光尋的制導(dǎo)精度高且成本相對(duì)低廉,作戰(zhàn)適應(yīng)性強(qiáng),使用載機(jī)本身的穩(wěn)定瞄準(zhǔn)指示系統(tǒng)或協(xié)同方的目標(biāo)定位激光照射系統(tǒng),空地導(dǎo)彈可靈活實(shí)現(xiàn)“指哪兒打哪兒”,實(shí)現(xiàn)坦克、車輛、工事、艦船等多種威脅目標(biāo)的高效毀傷。激光尋的制導(dǎo)武器日益成為直升機(jī)載和無(wú)人機(jī)載空面作戰(zhàn)的主戰(zhàn)武器,是機(jī)載對(duì)地精確打擊武器的上佳選擇[9-10]。
不同于被動(dòng)圖像尋的制導(dǎo)體制或者主動(dòng)毫米波尋的制導(dǎo)體制,激光尋的制導(dǎo)體制中導(dǎo)引頭的視場(chǎng)較大,不需要圖像制導(dǎo)與毫米波制導(dǎo)中較為復(fù)雜的導(dǎo)引頭掃描搜索設(shè)計(jì)以及目標(biāo)指向設(shè)計(jì)[11]。因此,對(duì)于激光尋的制導(dǎo)導(dǎo)彈,彈體上不需要安裝較為昂貴的慣性導(dǎo)航裝置,僅僅通過(guò)陀螺儀的安裝,即可實(shí)現(xiàn)導(dǎo)彈的平穩(wěn)控制,同時(shí)保證威脅目標(biāo)的高概率捕獲。
針對(duì)激光半主動(dòng)尋的空地導(dǎo)彈高精度制導(dǎo)與精確打擊需求,本文提出一種適用于激光半主動(dòng)尋的空地導(dǎo)彈的制導(dǎo)控制方法。詳細(xì)分析了激光尋的制導(dǎo)特性,通過(guò)對(duì)傾斜、俯仰和偏航3個(gè)通道的控制回路設(shè)計(jì),在高概率目標(biāo)捕獲的前提下,實(shí)現(xiàn)導(dǎo)彈彈體的穩(wěn)定控制,保證了高效毀傷威脅目標(biāo)所要求的彈目交匯狀態(tài)。
1 激光尋的目標(biāo)捕獲
1.1 制導(dǎo)控制系統(tǒng)組成
通常而言,制導(dǎo)控制系統(tǒng)包括目標(biāo)探測(cè)系統(tǒng)、飛行控制系統(tǒng)以及空地導(dǎo)彈本身[12]。目標(biāo)探測(cè)系統(tǒng)依托直升機(jī)載火控偵察設(shè)備提供待攻擊目標(biāo)的定位定向信息;飛行控制系統(tǒng)由飛行控制器、舵機(jī)、慣性導(dǎo)航裝置(或僅簡(jiǎn)單采用速率陀螺儀、姿態(tài)陀螺儀)、導(dǎo)引頭等組成。導(dǎo)引頭感知和測(cè)量目標(biāo)信息,慣性導(dǎo)航裝置(陀螺儀)實(shí)時(shí)測(cè)量導(dǎo)彈的運(yùn)動(dòng)狀態(tài),飛行控制器對(duì)目標(biāo)和導(dǎo)彈的信息進(jìn)行綜合處理,形成導(dǎo)彈的控制指令,驅(qū)動(dòng)舵面偏轉(zhuǎn),實(shí)現(xiàn)對(duì)導(dǎo)彈飛行狀態(tài)的控制。
1.2 激光尋的目標(biāo)捕獲
激光尋的制導(dǎo)空地導(dǎo)彈本機(jī)作戰(zhàn)的典型流程如下:在導(dǎo)彈發(fā)射后,由載機(jī)的激光指示器適時(shí)啟動(dòng)照射目標(biāo),激光導(dǎo)引頭接收漫反射的激光回波信息,制導(dǎo)控制系統(tǒng)根據(jù)導(dǎo)引頭輸出的視線角速度,綜合解算控制指令,控制空地導(dǎo)彈飛向目標(biāo)。激光尋的制導(dǎo)空地導(dǎo)彈的作戰(zhàn)過(guò)程示意圖如圖1所示。

圖1 激光尋的空地導(dǎo)彈的作戰(zhàn)過(guò)程示意圖Fig.1 Illustration of the combat process of AGM with a laser seeker
理想條件下,導(dǎo)彈經(jīng)過(guò)中制導(dǎo)段飛行后,當(dāng)導(dǎo)引頭開始工作時(shí),目標(biāo)應(yīng)位于激光導(dǎo)引頭的視場(chǎng)中心,即導(dǎo)引頭的光軸剛好指向目標(biāo)。導(dǎo)引頭視場(chǎng)投影的示意圖如圖2所示。
圖2 導(dǎo)引頭視場(chǎng)投影示意圖Fig.2 Projection of seeker’s FOV
圖2中,M表示導(dǎo)彈位置,h為導(dǎo)彈相對(duì)目標(biāo)的飛行高度,Ta表示目標(biāo)位置,Rs為激光導(dǎo)引頭的識(shí)別距離,?s、ψs分別為激光導(dǎo)引頭的俯仰瞬時(shí)視場(chǎng)角和偏航瞬時(shí)視場(chǎng)角,|BD|表示導(dǎo)引頭的瞬時(shí)視場(chǎng)縱深,|AC|表示導(dǎo)引頭的瞬時(shí)視場(chǎng)寬度。
然而,在導(dǎo)彈飛行過(guò)程中,導(dǎo)彈的飛行軌跡及目標(biāo)定位均會(huì)有一定的散布。對(duì)于圖像導(dǎo)引頭和毫米波導(dǎo)引頭而言,通常需要通過(guò)導(dǎo)引頭掃描或采用彈目指向設(shè)計(jì)來(lái)保證導(dǎo)引頭對(duì)目標(biāo)的準(zhǔn)確捕獲[13-14]。對(duì)激光導(dǎo)引頭而言,其視場(chǎng)范圍較大,基于武器系統(tǒng)對(duì)目標(biāo)的偵測(cè)性能指標(biāo),對(duì)于主要打擊非高速運(yùn)動(dòng)目標(biāo)的空地導(dǎo)彈而言,彈道的漂移不會(huì)使目標(biāo)落入激光導(dǎo)引頭視場(chǎng)之外。
假設(shè)激光導(dǎo)引頭對(duì)目標(biāo)截獲的事件X滿足正態(tài)分布,即X~N(μ,σ2),則截獲概率PX[15]可以表示為
PX=P{μ-kσ≤X≤μ+kσ}=
φ(k)-φ(-k)=2φ(k)-1,
(1)
式中:φ(·)為正態(tài)分布函數(shù);k為倍數(shù);μ為均值;σ為標(biāo)準(zhǔn)差。
根據(jù)(1)式可以分別求得導(dǎo)引頭在俯仰與偏航方向的截獲概率Pp、Py:
(2)
(3)
式中:Δp和Δy分別為中制導(dǎo)結(jié)束時(shí)俯仰方向和偏航方向的彈目綜合散布大小;Wp和Wy分別為俯仰方向和偏航方向的導(dǎo)引頭半視場(chǎng)寬度,可由?s、ψs以及Rs解算得到:
Wp=Rs·tan (?s/2),
(4)
Wy=Rs·tan (ψs/2).
(5)
Δp和Δy受彈體姿態(tài)測(cè)量與控制誤差導(dǎo)致的位置誤差、目標(biāo)定位誤差以及導(dǎo)引頭誤差的影響,可分別表示為
(6)
(7)
式中:Δpp和Δpy分別為俯仰方向和偏航方向的彈體姿態(tài)測(cè)量與控制誤差導(dǎo)致的位置誤差(簡(jiǎn)稱為導(dǎo)彈位置誤差),其受到陀螺儀測(cè)姿精度、導(dǎo)彈姿態(tài)控制等因素的影響;Δlp和Δly分別為俯仰方向和偏航方向的目標(biāo)定位誤差,其受到載機(jī)光電測(cè)量設(shè)備測(cè)距精度、測(cè)角精度、軸系校準(zhǔn)精度、照射精度、載機(jī)延時(shí)、數(shù)據(jù)傳輸延時(shí)等多種因素的影響;Δsp和Δsy分別為俯仰方向和偏航方向?qū)б^產(chǎn)生的位置誤差,主要受到導(dǎo)引頭框架角零位誤差的影響。
目標(biāo)定位誤差可通過(guò)(8)式計(jì)算獲得:
(8)
(9)
式中:Δd為載機(jī)光電測(cè)量設(shè)備的測(cè)距誤差;R0為載機(jī)與目標(biāo)之間的距離;Δφp為載機(jī)光電測(cè)量設(shè)備在俯仰方向的測(cè)角誤差;Δφy為載機(jī)光電測(cè)量設(shè)備在偏航方向的測(cè)角誤差;vT為目標(biāo)速度;T0為系統(tǒng)延遲時(shí)間總和。
導(dǎo)引頭產(chǎn)生的位置誤差可通過(guò)(10)式和(11)式計(jì)算獲得:
Δsp=Δφps·Rs,
(10)
Δsy=Δφys·Rs,
(11)
式中:Δφps為導(dǎo)引頭俯仰框架角零位誤差;Δφys為導(dǎo)引頭偏航框架角零位誤差。
導(dǎo)彈位置誤差受到彈體姿態(tài)測(cè)量與控制誤差的影響,陀螺儀是導(dǎo)彈角運(yùn)動(dòng)的測(cè)量器件,對(duì)導(dǎo)彈的姿態(tài)誤差產(chǎn)生直接影響。而彈體的姿態(tài)誤差將直接導(dǎo)致彈道傾角與期望彈道傾角的差異,使得導(dǎo)彈的速度矢量發(fā)生改變,繼而產(chǎn)生導(dǎo)彈位置誤差。導(dǎo)彈飛行時(shí)間越長(zhǎng),陀螺誤差漂移越大[16]。由于彈體姿態(tài)誤差導(dǎo)致的俯仰方向位置誤差Δpp和偏航方向位置誤差Δpy可分別表示為
(12)
(13)
式中:v(t)為導(dǎo)彈的飛行速度;Δ?(t)表示陀螺儀在俯仰方向的漂移角度;Δφ(t)表示陀螺儀在偏航方向的漂移角度。
以某典型參數(shù)的直升機(jī)載激光制導(dǎo)空地導(dǎo)彈為例,其識(shí)別距離Rs=3 000 m,導(dǎo)引頭俯仰方向和偏航方向的瞬時(shí)視場(chǎng)大小均為±15°,即圖2中的?s/2=ψs/2=15°,導(dǎo)彈射程為10 km,Δ?和Δφ的漂移角度為0.75°/40 s. 典型參數(shù)下各類誤差如表1所示。利用(6)式與(7)式計(jì)算可得,綜合誤差Δp=86.24 m,Δy=44.69 m.
表1 典型參數(shù)下激光尋的導(dǎo)彈系統(tǒng)誤差和捕獲概率
由表1可見(jiàn),由于激光導(dǎo)引頭視場(chǎng)較大,導(dǎo)引頭不進(jìn)行掃描處理的條件下,即可以獲得100%的目標(biāo)截獲概率。因而,激光制導(dǎo)空地導(dǎo)彈可在不安裝捷聯(lián)慣性導(dǎo)航裝置的條件下實(shí)現(xiàn)對(duì)目標(biāo)的高精度截獲,彈上僅僅通過(guò)獲取陀螺儀的信號(hào)就可實(shí)現(xiàn)對(duì)導(dǎo)彈的穩(wěn)定控制和目標(biāo)的高效毀傷。
導(dǎo)引頭對(duì)目標(biāo)的截獲概率Pc可以表示為
Pc=PpPy.
(14)
此外,導(dǎo)彈受到的干擾力矩和氣動(dòng)力誤差同樣會(huì)導(dǎo)致綜合誤差的增大,但對(duì)于大視場(chǎng)的激光導(dǎo)引頭而言,僅僅通過(guò)陀螺儀的姿態(tài)測(cè)量,就既可完全滿足目標(biāo)落入概率的要求,又能顯著降低空地導(dǎo)彈的成本。
2 激光尋的制導(dǎo)控制方法
激光尋的制導(dǎo)空地導(dǎo)彈的飛行控制過(guò)程主要包括3個(gè)階段,即初制導(dǎo)段、中制導(dǎo)段和末制導(dǎo)段。為實(shí)現(xiàn)對(duì)空地導(dǎo)彈的飛行控制,原理上可以通過(guò)對(duì)導(dǎo)彈俯仰、偏航、滾轉(zhuǎn)3個(gè)通道的姿態(tài)控制,實(shí)現(xiàn)對(duì)導(dǎo)彈質(zhì)心運(yùn)動(dòng)的控制。本文提出的激光尋的制導(dǎo)控制方法如圖3所示。
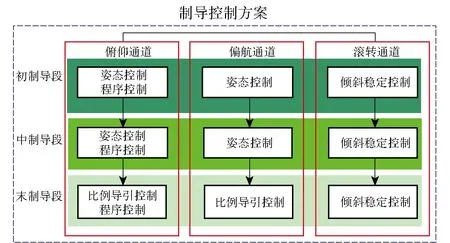
圖3 激光尋的制導(dǎo)控制方法Fig.3 Proposed guidance control method for AGM with laser seeker
2.1 傾斜穩(wěn)定控制
對(duì)于滾轉(zhuǎn)通道,采用全程(初制導(dǎo)段、中制導(dǎo)段和末制導(dǎo)段)傾斜穩(wěn)定控制,傾斜姿態(tài)穩(wěn)定回路的主要目的是為高低和方位控制提供基準(zhǔn),將重力補(bǔ)償信號(hào)正確地引入俯仰通道,并消除俯仰通道和偏航通道之間的交叉耦合。滾轉(zhuǎn)通道的傾斜穩(wěn)定是俯仰控制回路和偏航控制回路能夠正常工作的前提,此外,傾斜穩(wěn)定還可以消除因常值傾斜干擾力矩引起的傾斜角穩(wěn)態(tài)誤差,提高導(dǎo)彈的導(dǎo)引品質(zhì)和動(dòng)態(tài)品質(zhì),提升導(dǎo)引頭穩(wěn)定截獲目標(biāo)的概率。傾斜穩(wěn)定回路的原理框圖如圖4所示。
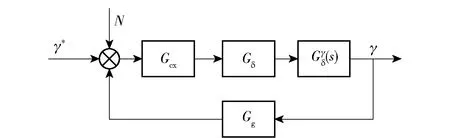
圖4 傾斜穩(wěn)定回路原理框圖Fig.4 Block diagram of tilt stability control loop
根據(jù)滾轉(zhuǎn)通道彈體模型,選擇比例+積分+微分(PID)控制器[16-17]作為傾斜穩(wěn)定回路的控制器設(shè)計(jì)方案,以保證系統(tǒng)具有良好的動(dòng)態(tài)品質(zhì),同時(shí)可以消除因常值傾斜干擾力矩引起的傾斜角穩(wěn)態(tài)誤差。
傾斜穩(wěn)定回路PID控制器的傳遞函數(shù)模型[17-18]為
(15)
式中:KP、KI、KD分別為PID控制器的比例項(xiàng)增益、積分項(xiàng)增益和微分項(xiàng)增益。
2.2 姿態(tài)穩(wěn)定控制
姿態(tài)控制回路的主要作用是抑制因?qū)楇x軌初始擾動(dòng)、初始安裝誤差、發(fā)動(dòng)機(jī)推力偏心等因素引起的飛行彈道的散布。姿態(tài)控制可抑制初制導(dǎo)段的初始擾動(dòng),實(shí)現(xiàn)中制導(dǎo)段期望的平飛彈道。對(duì)于具有較大靜穩(wěn)定度的空地導(dǎo)彈而言,其本身的短周期振蕩運(yùn)動(dòng)是嚴(yán)重欠阻尼的,阻尼系數(shù)很小時(shí),寬頻帶噪聲將導(dǎo)致攻角振蕩值增大,使得誘導(dǎo)阻力增加,射程減小。此外,較小的阻尼系數(shù)還會(huì)降低導(dǎo)彈的跟蹤精度,甚至導(dǎo)致導(dǎo)彈失控[19],因此,將阻尼回路作為姿態(tài)控制回路的內(nèi)回路,以有效增大導(dǎo)彈的等效阻尼系數(shù)。
2.2.1 阻尼控制回路
在俯仰、偏航通道控制系統(tǒng)采用角速率反饋,以改善彈體的阻尼特性。阻尼回路的結(jié)構(gòu)框圖如圖5所示。
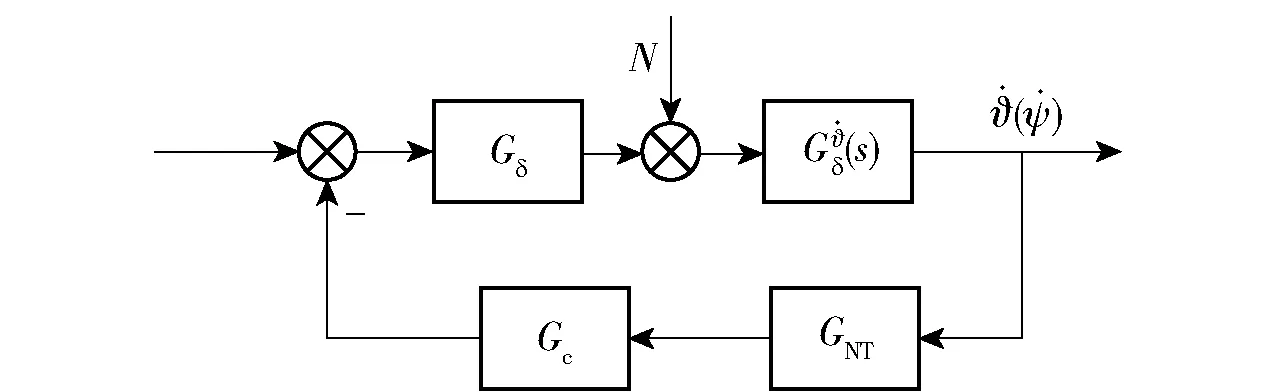
圖5 阻尼回路結(jié)構(gòu)框圖Fig.5 Block diagram of damping loop

根據(jù)俯仰(偏航)通道彈體阻尼特性,選擇合適的增益參數(shù)并增加1階濾波器作為阻尼回路的控制器,以保證增加阻尼控制后,導(dǎo)彈具有良好的阻尼性能。阻尼控制器的傳遞函數(shù)可以表示為
(16)
式中:Kc1表示阻尼控制器增益;T表示阻尼濾波器時(shí)間常數(shù)。將阻尼回路進(jìn)行簡(jiǎn)化,如圖6所示。
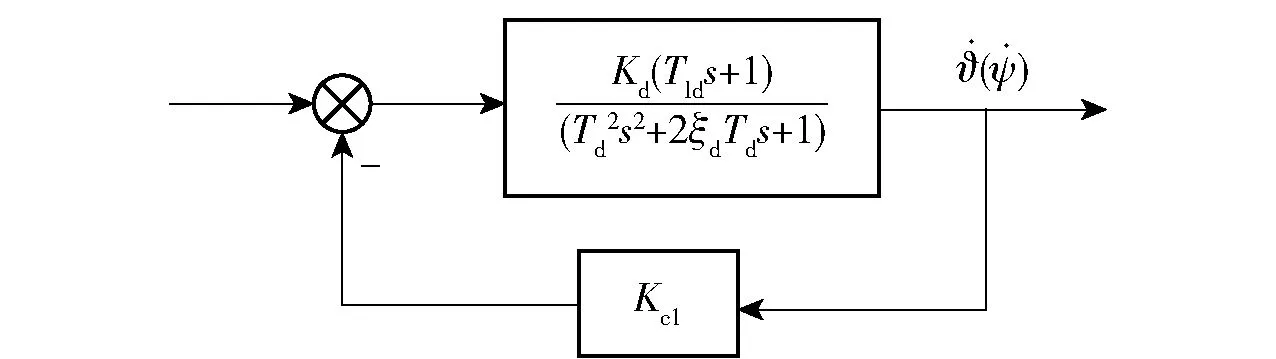
圖6 簡(jiǎn)化的阻尼回路結(jié)構(gòu)框圖Fig.6 Block diagram of simplified damping loop
根據(jù)圖6,經(jīng)簡(jiǎn)單的數(shù)學(xué)變換,可以推導(dǎo)得到阻尼回路的閉環(huán)傳遞函數(shù):
(17)
式中:
(18)
(19)
(20)

(21)
即
(22)
以某典型激光尋的空地導(dǎo)彈參數(shù)為例,利用文獻(xiàn)[20]方法進(jìn)行Td、T1d和Kd的參數(shù)計(jì)算,阻尼回路增益Kc1的結(jié)果如圖7所示,增加阻尼回路前后彈體阻尼對(duì)比結(jié)果如圖8所示。
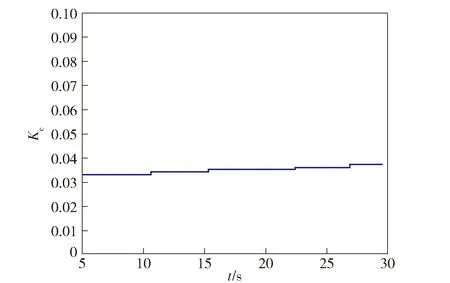
圖7 阻尼回路增益Kc1設(shè)計(jì)結(jié)果Fig.7 Designed gain coefficient Kc1 in damping loop
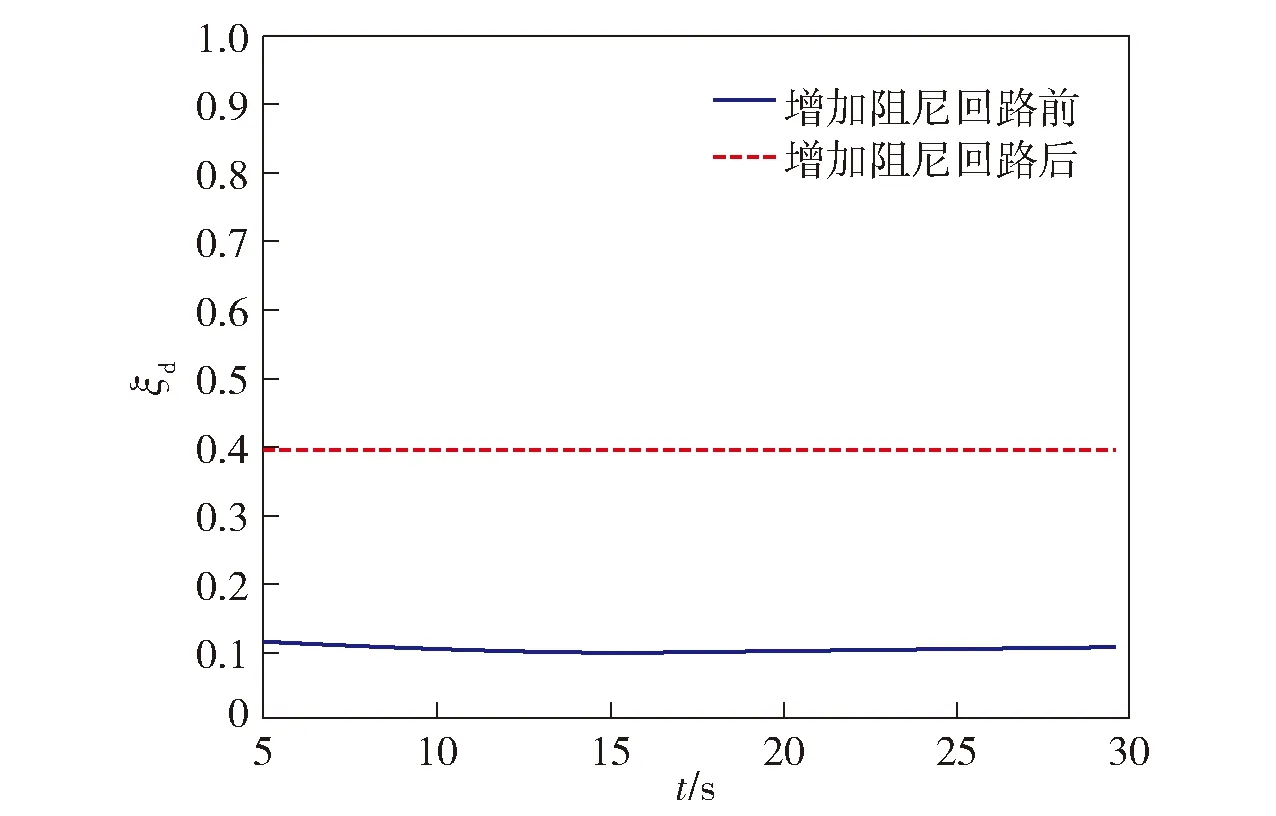
圖8 增加阻尼回路前后彈體阻尼對(duì)比Fig.8 Comparison of damping characteristics with/without damping loop
2.2.2 姿態(tài)控制回路
俯仰(偏航)姿態(tài)控制回路原理框圖如圖9所示。俯仰姿態(tài)控制回路的輸入?*為設(shè)計(jì)的導(dǎo)彈爬升規(guī)律,俯仰姿態(tài)角按照該規(guī)律變化,導(dǎo)彈在預(yù)定時(shí)間內(nèi)爬升到期望的飛行高度。偏航姿態(tài)控制回路的輸入ψ*為彈目線方位角,在初制導(dǎo)段和中制導(dǎo)段,導(dǎo)彈偏航姿態(tài)角追蹤彈目線方位角有利于提高導(dǎo)引頭對(duì)目標(biāo)的捕獲概率。
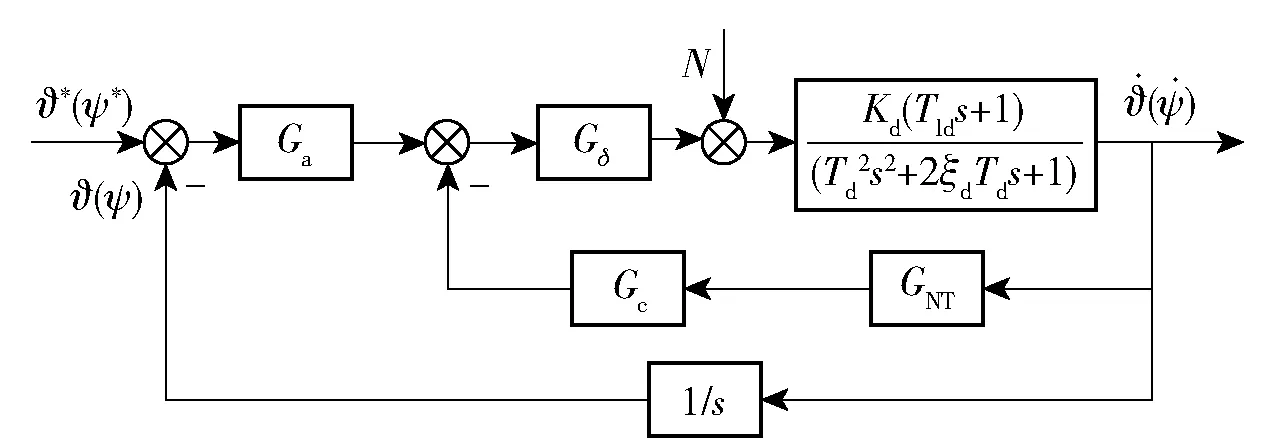
圖9 姿態(tài)控制回路結(jié)構(gòu)框圖Fig.9 Block diagram of attitude control loop
圖9中,?*、ψ*分別為俯仰姿態(tài)控制回路輸入、偏航姿態(tài)控制回路輸入,?、ψ分別為俯仰姿態(tài)角、偏航姿態(tài)角,Ga為姿態(tài)控制器。
選擇超前- 滯后校正網(wǎng)絡(luò)[20-21]為姿態(tài)控制回路的控制器設(shè)計(jì)方案,以保證系統(tǒng)具有良好的動(dòng)態(tài)品質(zhì)。姿態(tài)控制器的傳遞函數(shù)[21-22]可以表示為
(23)
式中:Kc3為姿態(tài)回路超前- 滯后控制器增益;T1、T2、T3、T4分別為姿態(tài)回路超前- 滯后控制器參數(shù)。
2.3 比例導(dǎo)引制導(dǎo)律
對(duì)于末段尋的制導(dǎo)方式,比例導(dǎo)引制導(dǎo)律[23-24]易于實(shí)現(xiàn)且具有較高的制導(dǎo)精度。激光導(dǎo)引頭可以輸出俯仰方向和偏航方向的視線角速度信號(hào),利用該信號(hào)可實(shí)現(xiàn)比例導(dǎo)引制導(dǎo)律,導(dǎo)引導(dǎo)彈命中目標(biāo)。比例導(dǎo)引制導(dǎo)律的原理是導(dǎo)彈在攻擊目標(biāo)的導(dǎo)引過(guò)程中,導(dǎo)彈速度矢量的旋轉(zhuǎn)角速度與目標(biāo)視線旋轉(zhuǎn)角速度呈比例,即滿足[23-24]:
(24)
(25)


圖10 比例導(dǎo)引控制系統(tǒng)結(jié)構(gòu)框圖Fig.10 Block diagram of proportional guidance control system
2.4 程序控制
設(shè)計(jì)程序控制指令,用以克服彈體受到的重力等外力擾動(dòng),保證導(dǎo)彈與目標(biāo)交會(huì)時(shí)的較優(yōu)落角值,實(shí)現(xiàn)對(duì)高威脅目標(biāo),尤其是裝甲類目標(biāo)的有效毀傷。程序控制指令的設(shè)計(jì)原理是實(shí)現(xiàn)力平衡與力矩平衡,導(dǎo)彈力平衡與力矩平衡的示意圖如圖11所示。
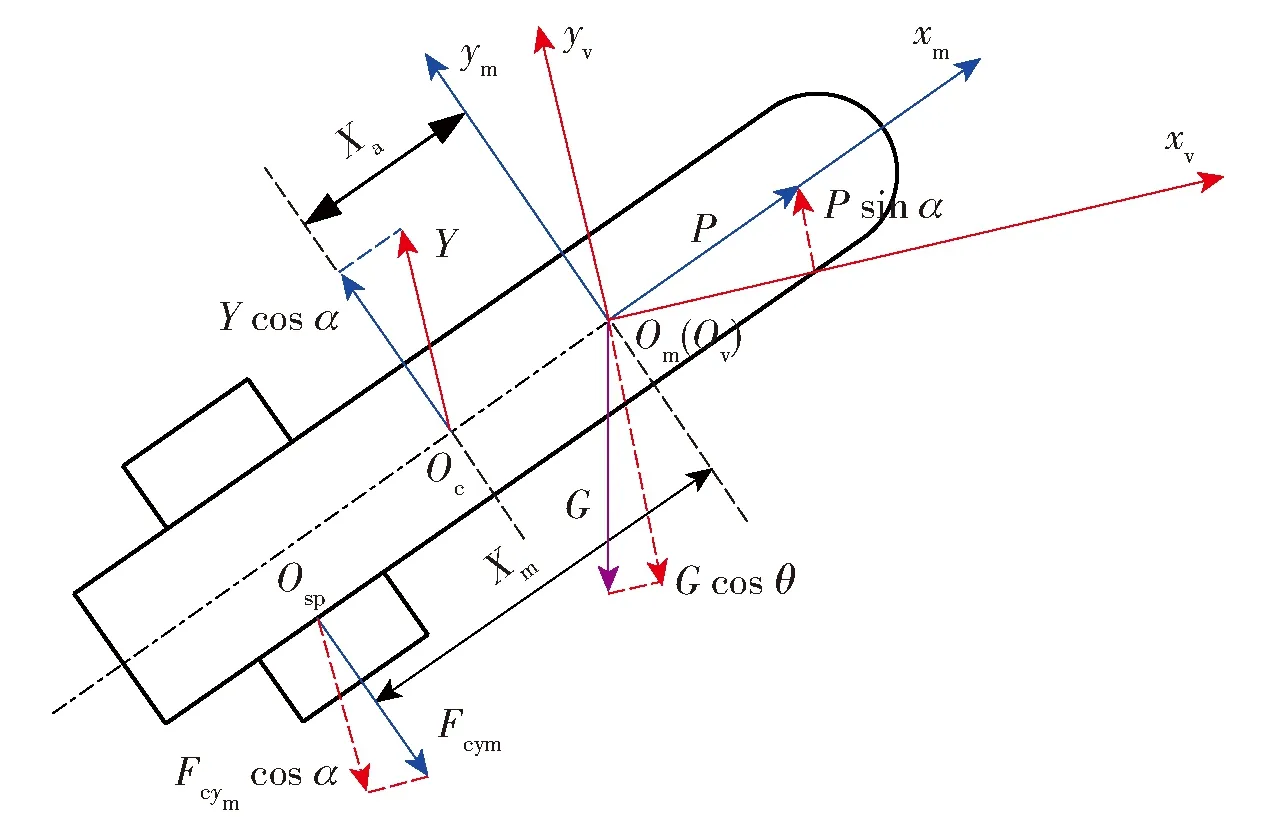
圖11 導(dǎo)彈力的平衡與力矩平衡示意圖Fig.11 Illustration of force balance and moment balance

在速度坐標(biāo)系Ovxvyvzv上受力平衡時(shí),滿足:
Y+Psinα=Fcymcosα+mgcosθ.
(26)
在彈體坐標(biāo)系Omxmymzm上力矩平衡時(shí),滿足:
Ycosα·Xa=FcymXm.
(27)

(28)
(29)
由(29)式可得
(30)
(31)
以某射程為10 km的激光制導(dǎo)空地導(dǎo)彈為例,待攻擊目標(biāo)為裝甲類目標(biāo)。欲保證此裝甲目標(biāo)的高效毀傷,需要較大的攻擊落角。有無(wú)程序控制條件下的y向彈道對(duì)比曲線如圖12所示,俯仰角對(duì)比曲線如圖13所示,可見(jiàn),無(wú)程序控制條件下的末制導(dǎo)段導(dǎo)彈俯仰角較小,無(wú)法滿足裝甲類目標(biāo)(如主戰(zhàn)坦克等)的大落角攻擊需求。
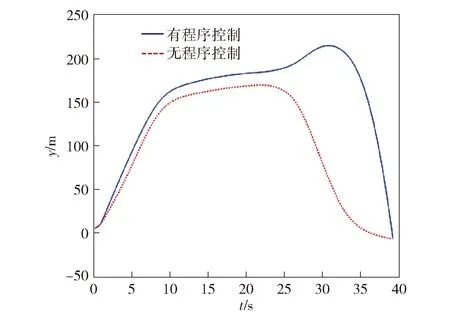
圖12 有無(wú)程序控制條件下y軸方向彈道對(duì)比曲線Fig.12 Curves of missile trajectory along y direction with/without programming control
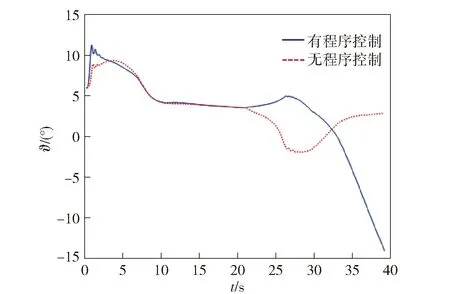
圖13 有無(wú)程序控制條件下俯仰角對(duì)比曲線Fig.13 Curves of pitching angle with/without programming control
3 激光啟動(dòng)照射時(shí)間設(shè)計(jì)
對(duì)于激光尋的空地導(dǎo)彈而言,激光啟照時(shí)間的確定關(guān)系到整個(gè)制導(dǎo)控制系統(tǒng)的設(shè)計(jì)。為了保證照射平臺(tái)的安全性,需要精確計(jì)算激光照射器的啟動(dòng)照射時(shí)間,減少不必要的激光指示時(shí)間,降低激光照射平臺(tái)暴露以及被實(shí)施激光干擾的風(fēng)險(xiǎn)。此外,激光照射器的工作時(shí)間越長(zhǎng),熱積累越多,將直接影響激光二極管的工作溫度,繼而影響激光能量。因此,激光照射時(shí)間越長(zhǎng),對(duì)照射器的重量和溫控電功率的需求越大[25]。而受限于空地導(dǎo)彈武器系統(tǒng)激光照射器的尺寸和重量,激光照射器無(wú)法長(zhǎng)時(shí)間進(jìn)行工作,準(zhǔn)確的激光照射時(shí)間計(jì)算可顯著降低激光照射器的照射時(shí)間。
空地導(dǎo)彈的射程和激光導(dǎo)引頭的有效作用距離直接決定了激光啟動(dòng)照射時(shí)間的設(shè)計(jì)。然而,空地導(dǎo)彈在實(shí)際應(yīng)用中,不同溫度、不同海拔高度、不同載機(jī)飛行速度等條件都會(huì)對(duì)空地導(dǎo)彈的飛行時(shí)間產(chǎn)生影響,僅僅考慮空地導(dǎo)彈的射程與激光導(dǎo)引頭的有效作用距離無(wú)法實(shí)現(xiàn)激光啟動(dòng)照射時(shí)間的精確計(jì)算。圖14給出了不同海拔、溫度以及載機(jī)飛行狀態(tài)條件下某空地導(dǎo)彈的速度曲線,可以看到明顯的速度特性差異。
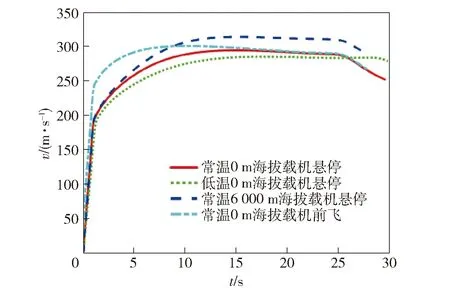
圖14 不同條件下導(dǎo)彈速度特性對(duì)比Fig.14 Missile velocities under different conditions
因而,空地導(dǎo)彈的激光啟動(dòng)照射時(shí)間,同樣受到上述各因素的影響。為了解決多種因素對(duì)激光啟動(dòng)照射時(shí)間的影響問(wèn)題,可采取多維插值的方式進(jìn)行處理。首先,根據(jù)空地導(dǎo)彈的使用范圍和攻擊包絡(luò),選取溫度特征點(diǎn)、海拔高度特征點(diǎn)和載機(jī)飛行速度特征點(diǎn);然后,將導(dǎo)彈的最大射程和最小射程進(jìn)行均勻分段處理,獲得導(dǎo)彈飛行距離區(qū)間段;再基于導(dǎo)彈的6自由度模型,分別計(jì)算不同溫度、不同海拔高度、不同載機(jī)飛行速度條件下的導(dǎo)彈飛行時(shí)間,建立溫度、海拔高度和載機(jī)飛行速度的導(dǎo)彈飛行時(shí)間三維數(shù)表。具體應(yīng)用時(shí),根據(jù)導(dǎo)彈所處環(huán)境信息進(jìn)行三維插值,獲得激光啟動(dòng)照射時(shí)間。
4 試驗(yàn)結(jié)果
通過(guò)某激光尋的空地導(dǎo)彈驗(yàn)證本文所提制導(dǎo)控制方法的有效性(見(jiàn)圖15)。此激光導(dǎo)引頭俯仰和偏航方向的瞬時(shí)動(dòng)態(tài)視場(chǎng)均為±15°,激光導(dǎo)引頭的有效識(shí)別距離為3 km,空地導(dǎo)彈的射程為10 km,攻擊目標(biāo)為裝甲類靜止目標(biāo)。采用本文所述制導(dǎo)控制方法,進(jìn)行導(dǎo)彈6自由度仿真。通過(guò)理論計(jì)算結(jié)果和實(shí)際飛行試驗(yàn)結(jié)果對(duì)比的方式,驗(yàn)證本文所述方法的有效性。導(dǎo)彈的y軸方向和z軸方向位置曲線分別如圖16和圖17所示。俯仰、偏航和滾轉(zhuǎn)姿態(tài)角分別如圖18~圖20所示。由試驗(yàn)結(jié)果可見(jiàn),采用本文所述方法進(jìn)行激光尋的空地導(dǎo)彈的制導(dǎo)控制,導(dǎo)彈的位置和姿態(tài)飛行結(jié)果符合期望,可以取得滿意的試驗(yàn)結(jié)果,該導(dǎo)彈實(shí)現(xiàn)了威脅目標(biāo)的精確打擊,命中精度滿足導(dǎo)彈武器系統(tǒng)的總體要求,實(shí)現(xiàn)了該裝甲類目標(biāo)的高效毀傷。

圖15 某激光尋的空地導(dǎo)彈發(fā)射瞬間Fig.15 A moment of launching a laser guided AGM
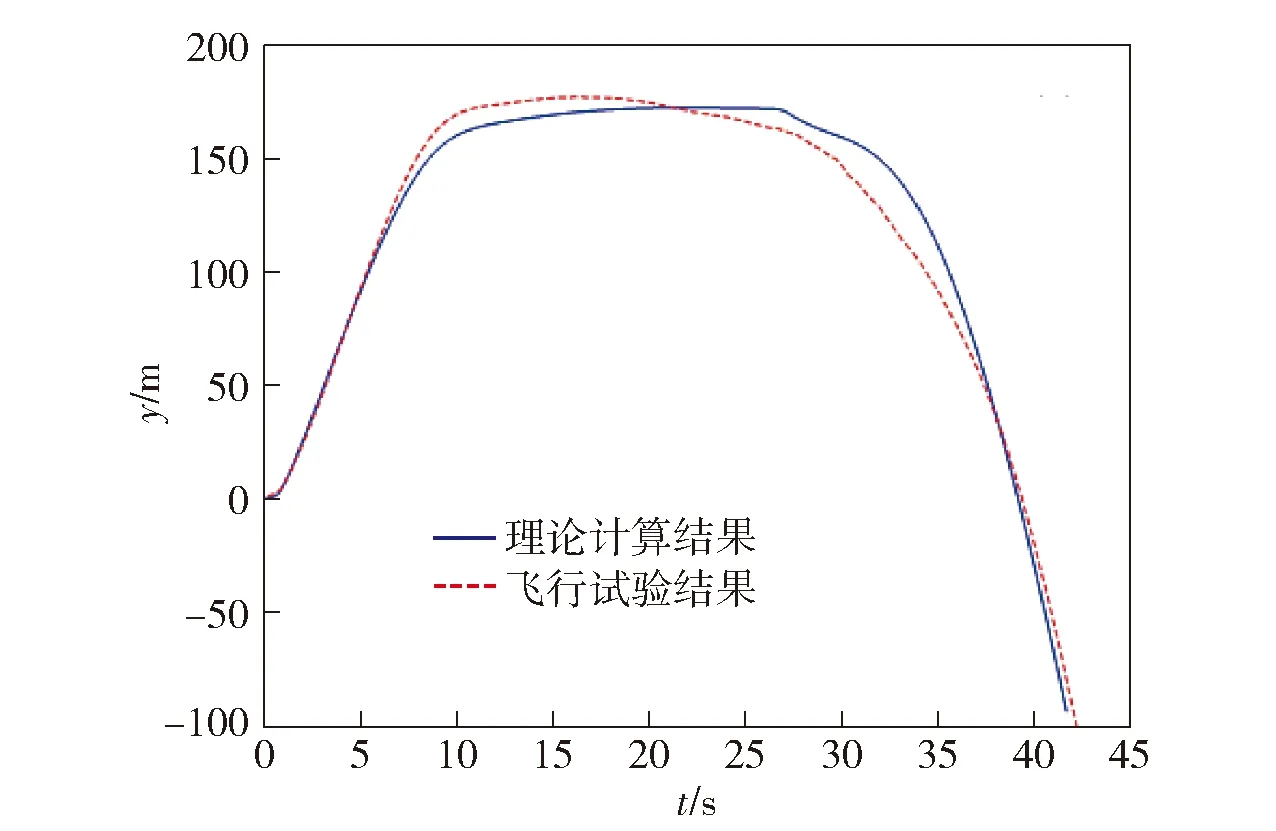
圖16 y軸方向彈道曲線Fig.16 Curves of missile trajectory along y direction
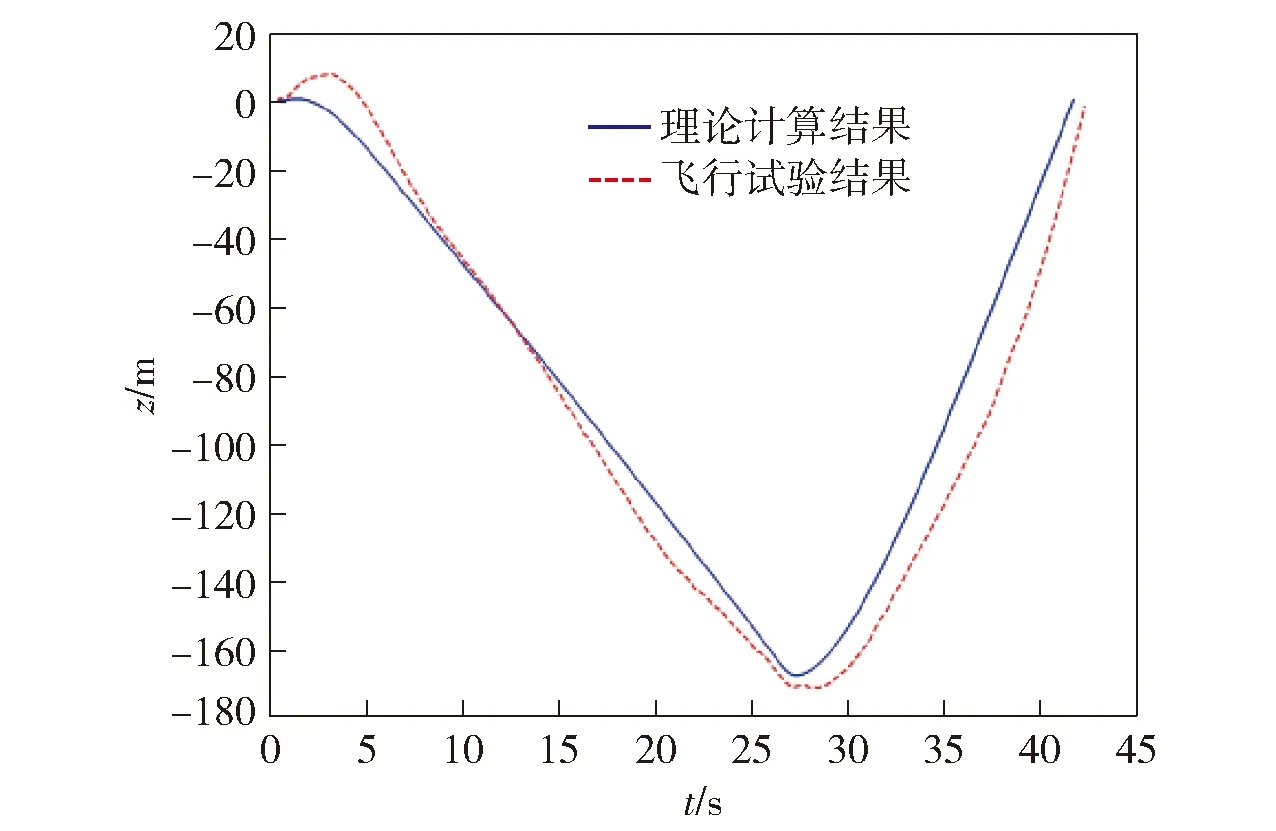
圖17 z軸方向彈道曲線Fig.17 Curves of missile trajectory along z direction
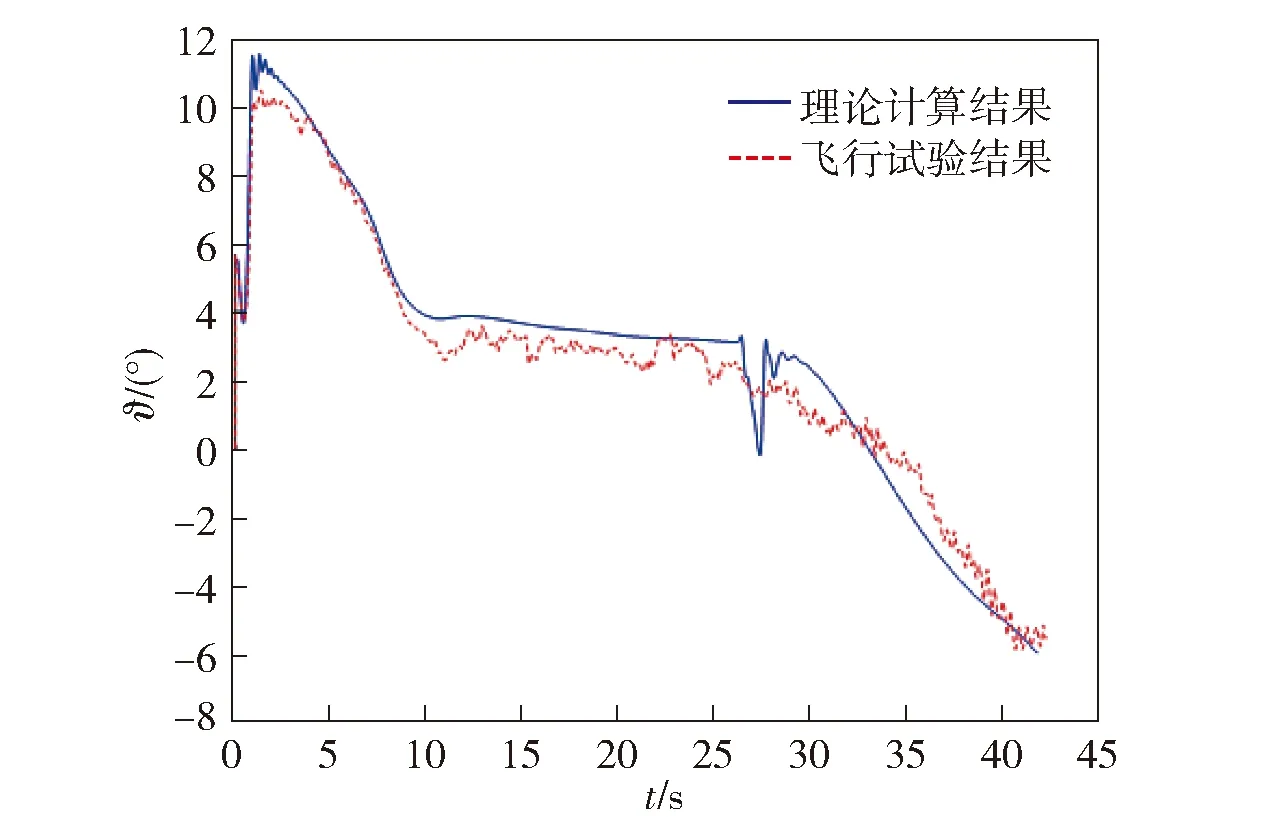
圖18 俯仰角曲線Fig.18 Curves of pitching angle
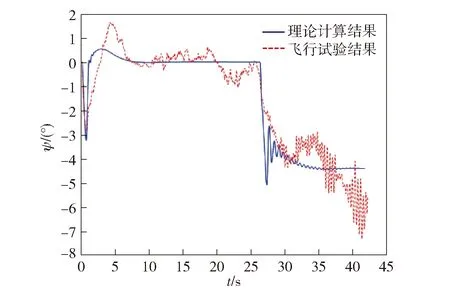
圖19 偏航角曲線Fig.19 Curves of yawing angle
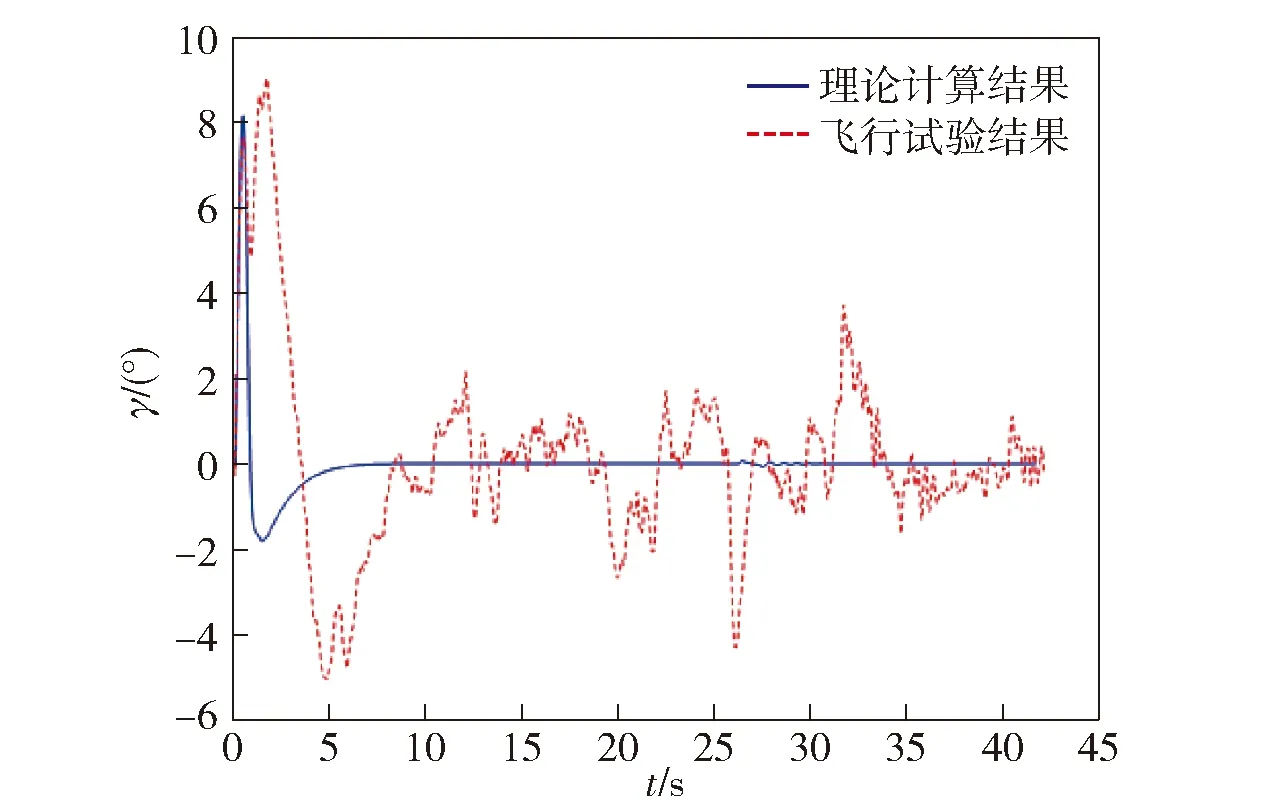
圖20 滾轉(zhuǎn)角曲線Fig.20 Curves of rolling angle
需要說(shuō)明的是,由圖16~圖20可見(jiàn),雖然理論設(shè)計(jì)的導(dǎo)彈位置和姿態(tài)結(jié)果與飛行試驗(yàn)取得的結(jié)果相吻合,但是仍然有部分較為明顯的差異。這是由于導(dǎo)彈在飛行過(guò)程中的某些誤差難以精確估計(jì),如導(dǎo)彈初始離軌擾動(dòng)的大小、舵機(jī)安裝角度誤差等原因?qū)е聦?dǎo)彈受到的干擾力矩以及氣動(dòng)力誤差等。這些誤差的精確估計(jì)與補(bǔ)償非常困難,誤差的存在將導(dǎo)致理論設(shè)計(jì)結(jié)果與飛行試驗(yàn)結(jié)果的偏差。
此外,導(dǎo)彈在飛行過(guò)程中還不可避免地受到環(huán)境因素的影響,例如導(dǎo)彈飛行過(guò)程中的風(fēng)速大小、海拔高度以及載機(jī)平臺(tái)的飛行速度等。對(duì)于制導(dǎo)控制系統(tǒng)而言,這些參數(shù)同樣難以精確描述與補(bǔ)償,環(huán)境因素的存在也會(huì)對(duì)理論設(shè)計(jì)與實(shí)際飛行試驗(yàn)結(jié)果的差異產(chǎn)生影響。
5 結(jié)論
本文提出了一種適用于激光尋的空地導(dǎo)彈的制導(dǎo)控制方法,通過(guò)傾斜穩(wěn)定控制、姿態(tài)控制、比例導(dǎo)引控制以及程序控制的設(shè)計(jì)與有機(jī)結(jié)合,實(shí)現(xiàn)了導(dǎo)彈彈體的穩(wěn)定控制以及高概率目標(biāo)捕獲。
激光尋的空地導(dǎo)彈的飛行試驗(yàn)結(jié)果表明,采用本文所述方法,通過(guò)對(duì)俯仰、偏航和滾轉(zhuǎn)3個(gè)通道的控制,在彈上僅安裝陀螺儀的條件下,即可實(shí)現(xiàn)對(duì)導(dǎo)彈俯仰、偏航、滾轉(zhuǎn)3個(gè)通道的姿態(tài)控制。理論設(shè)計(jì)的彈道和姿態(tài)角與導(dǎo)彈的實(shí)際飛行結(jié)果相吻合,程序控制可保證目標(biāo)高效毀傷的落角需求。本文所述制導(dǎo)控制方法可實(shí)現(xiàn)激光尋的空地導(dǎo)彈的彈體穩(wěn)定控制,可為威脅目標(biāo)的精確打擊和高效毀傷提供堅(jiān)實(shí)的技術(shù)支撐。