可重構(gòu)六維加速度傳感器的構(gòu)型奇異分析?
2021-03-13 07:17:16陳華鑫尤晶晶王林康史浩飛葉鵬達
傳感技術(shù)學(xué)報 2021年12期
關(guān)鍵詞:質(zhì)量
陳華鑫尤晶晶王林康史浩飛葉鵬達
(1.南京林業(yè)大學(xué)機械電子工程學(xué)院,江蘇 南京 210037;2.江蘇省精密與微細制造技術(shù)重點實驗室,江蘇 南京 210016)
六維加速度傳感器在汽車安全、機器人、航空航天等領(lǐng)域有著廣泛的應(yīng)用[1-3]。 隨著科學(xué)的進步與發(fā)展,為了獲取物體實時、精確的位姿信息,人們對六維加速度傳感器的靈敏度、精度要求越來越高。目前,六維加速度傳感器仍處于實驗室原理論證階段。 Vladimir Chapsky 等提出了一種彈簧光電型六維加速度傳感器[4],孫治博等提出了一種基于Gough-Stewart 機構(gòu)的六維加速度傳感器[5],他們的不足之處是在解耦過程中忽略了質(zhì)量塊與基座的相對運動而沒有考慮機構(gòu)的奇異位形。 然而,由于多維傳感器彈性體結(jié)構(gòu)的自由度數(shù)較高,傳感器在工作時可能處于奇異位形。 當彈性體結(jié)構(gòu)的位姿接近于奇異位形時,其靈活度大幅下降,甚至實際自由度不再與理論自由度相等,嚴重影響了傳感器的性能。因此,六維加速度傳感器彈性體結(jié)構(gòu)的奇異性是一個重要的性能指標。
本課題組已設(shè)計出四種構(gòu)型的六維加速度傳感器,包括9-3、9-4、12-4 和12-6 型。 前期研究結(jié)果表明,不同構(gòu)型傳感器的剛度、測量精度、效率等性能指標不同[6],同一構(gòu)型的多個性能指標之間也存在矛盾[7]。 為適應(yīng)不同的工作場合[8-11],我們提出了“可重構(gòu)六維加速度傳感器”的概念,即六維加速度傳感器的彈性體結(jié)構(gòu)能夠在多種構(gòu)型之間自由切換。
本文對一種可重構(gòu)六維加速度傳感器的四種構(gòu)型建立了正向動力學(xué)方程和正向運動學(xué)方程,推導(dǎo)出了由基座加速度分量表達的質(zhì)量塊相對于基座的位姿解。 進一步地,使用Gosselin 法分析了四種構(gòu)型的奇異位形。 最后,研究了傳感器四種構(gòu)型的奇異位形與基座加速度、質(zhì)量塊的質(zhì)量之間的關(guān)系,從理論上指導(dǎo)了傳感器構(gòu)型的選擇。
1 傳感器的結(jié)構(gòu)模型及工作原理
可重構(gòu)六維加速度傳感器由邊長為2n 的質(zhì)量塊、基座以及數(shù)條初始長度為L 的SPS 支鏈組成(S代表球面副,P 代表移動副)。 如圖1 所示,支鏈采用可改變工作狀態(tài)的拉動式結(jié)構(gòu)。 當傳感器重構(gòu)為某一構(gòu)型時,拉動該構(gòu)型對應(yīng)的所有支鏈,此時支鏈上的彈簧壓縮,彈簧剛度增大。
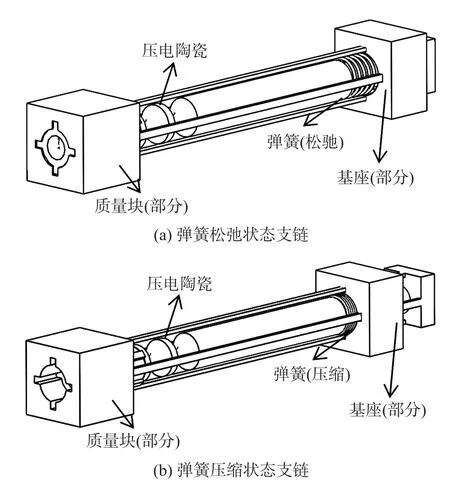
圖1 可重構(gòu)六維加速度傳感器的支鏈結(jié)構(gòu)
不同構(gòu)型的并聯(lián)式六維加速度傳感器原理相同,根據(jù)傳感器支鏈個數(shù)、復(fù)合球鉸鏈個數(shù),傳感器可分為9-3、9-4、12-4 及12-6 構(gòu)型等。 傳感器在實際工作時,外殼剛性固定在待測載體上一起做加速運動,質(zhì)量塊在慣性力的作用下壓縮或拉伸支鏈。各支鏈上壓電陶瓷受到軸向力的作用,由于正壓電效應(yīng),壓電陶瓷的兩端會產(chǎn)生電荷,且電荷量的多少與作用在外殼上六維加速度的大小有關(guān)。 實際解耦時,首先,測量出所有壓電陶瓷兩端的電荷量,并運用壓電理論將其換算成支鏈的變形量;然后,運用并聯(lián)機構(gòu)的運動學(xué)理論將支鏈的變形量換算成質(zhì)量塊相對于外殼的運動參量;最后,用外殼相對于慣性參考系以及質(zhì)量塊相對于外殼的運動參量來表示質(zhì)量塊相對于慣性參考系的運動參量,通過建立并求解系統(tǒng)的動力學(xué)方程得到待測加速度的6 個分量[12]。
六維加速度傳感器能夠在9-3、9-4、12-4 及12-6 這四種構(gòu)型之間實現(xiàn)重構(gòu),如圖2 所示。 分別在質(zhì)量塊和基座上固聯(lián)坐標系{O1}和{O2}。 初始狀態(tài)下兩坐標系重合,其坐標原點位于質(zhì)量塊的質(zhì)心處。 本文以12-4 構(gòu)型傳感器為例,對其建立正向動力學(xué)、運動學(xué)方程并計算其雅可比矩陣條件數(shù)。
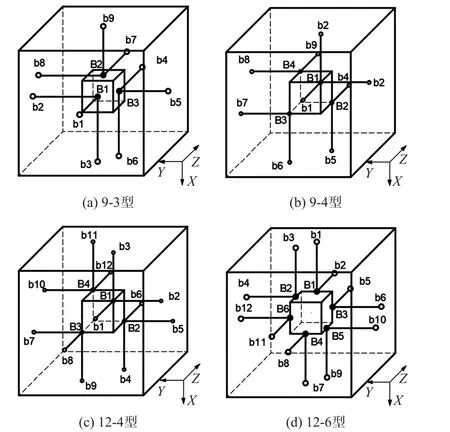
圖2 傳感器四種構(gòu)型的支鏈布局原理圖
2 正向動力學(xué)模型
六維加速度傳感器的輸入量為基座的六維加速度,輸出量為所有支鏈的軸向力。 每個輸入量均會引起所有輸出量的變化,因此,六維加速度傳感器屬于多輸入、多輸出的非線性、強耦合系統(tǒng)。 通過構(gòu)建系統(tǒng)的動力學(xué)方程,根據(jù)基座的六維加速度求解各個支鏈的軸向力,該過程稱為“正向動力學(xué)求解”。
2.1 正向動力學(xué)方程
由于傳感器質(zhì)量塊的質(zhì)量遠大于支鏈的質(zhì)量,且各個支鏈兩端均為球面副,因此各條支鏈均可看作二力桿。 記fi為傳感器中第i條支鏈輸出的軸向力。
定義前置矩陣和后置矩陣,其表達式分別為:
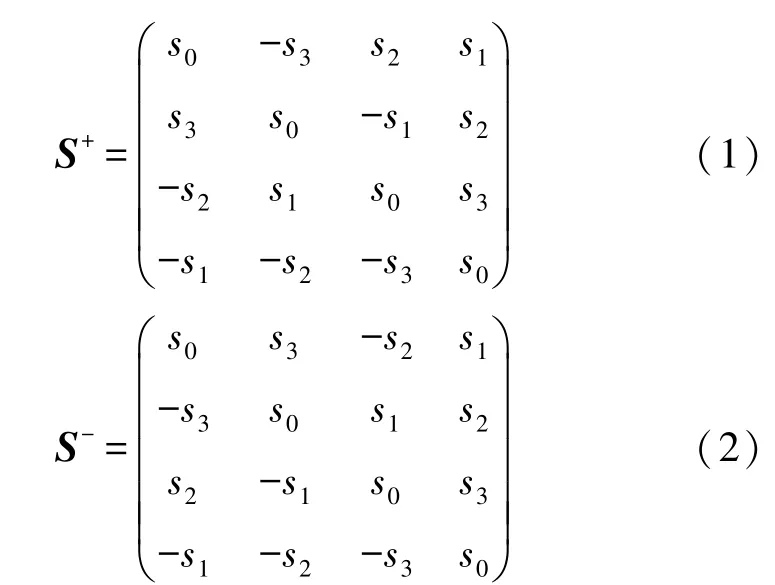
式中:子元素s1、s2、s3、s0均為實數(shù),由它們組成的列向量記作S;上標“+”、“-”分別表示對應(yīng)向量的前置矩陣和后置矩陣。 當子元素取四元數(shù)的虛部λ1、λ2、λ3和實部λ0時,對應(yīng)的矩陣稱為前置四元數(shù)矩陣和后置四元數(shù)矩陣。 由此,可用單位四元數(shù)(λ1,λ2,λ3,λ0)描述載體系{O2}和慣性系之間的四階旋轉(zhuǎn)矩陣R:

運用牛頓-歐拉法可分別對傳感器的四種構(gòu)型建立兩組動力學(xué)方程[13-14]。 12-4 構(gòu)型的兩組動力學(xué)方程為:
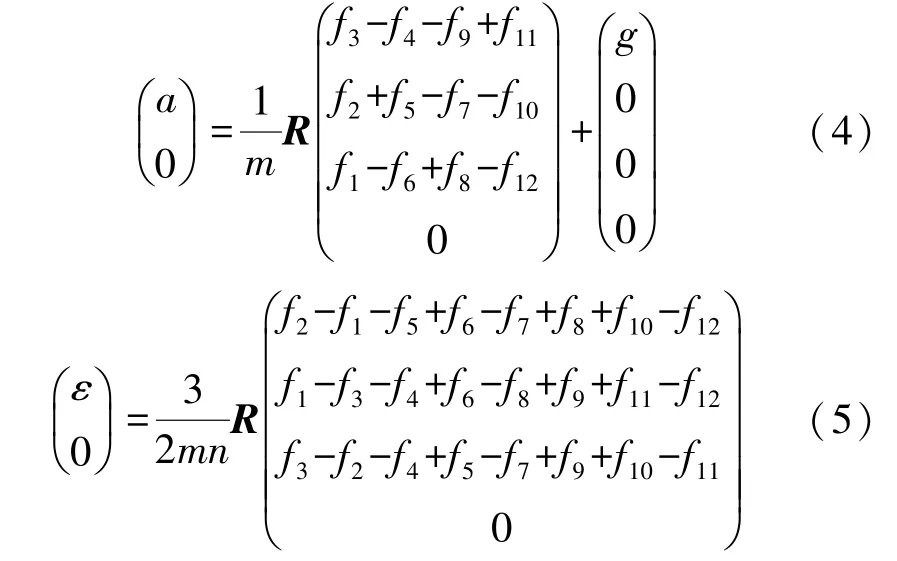
式中:a、ε分別表示三維線加速度矢量和三維角加速度矢量;m為質(zhì)量塊的質(zhì)量;g為重力加速度。
2.2 正向動力學(xué)求解
根據(jù)所建立的兩組動力學(xué)方程(4)、(5),可得到傳感器輸入、輸出量之間的映射關(guān)系:
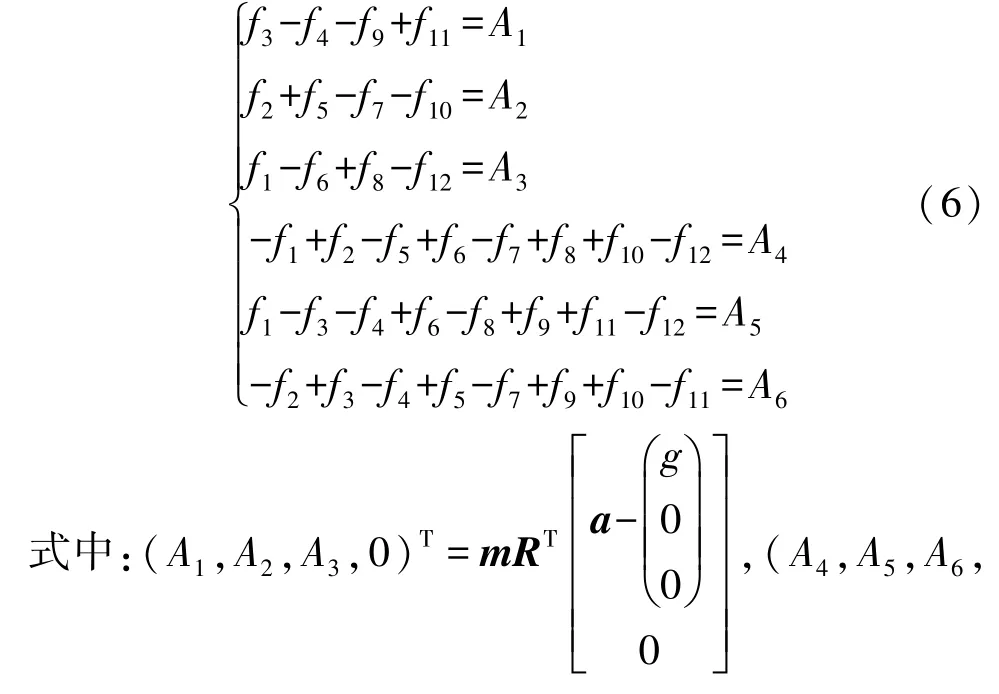

進一步分析后發(fā)現(xiàn),四種構(gòu)型的支鏈數(shù)均多于動力學(xué)方程的數(shù)目。 因此,僅利用式(6)還無法求解出支鏈的軸向力。 本文基于并聯(lián)機構(gòu)的正向運動學(xué)理論,挖掘傳感器在四種不同的構(gòu)型下,輸出量之間的固有約束關(guān)系,從而建立補充方程。
在坐標系{O2}中,傳感器支鏈的矢量可表示為
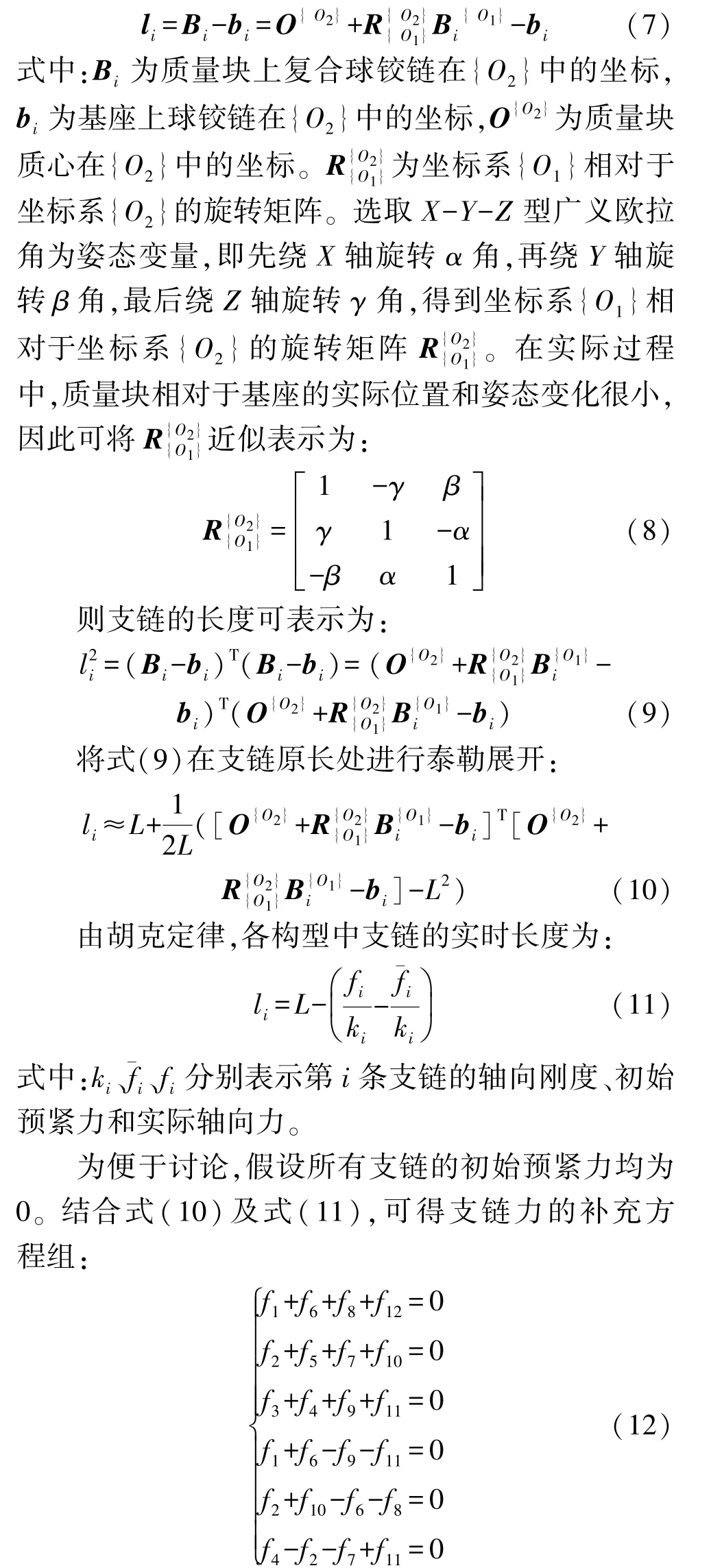
結(jié)合式(6),可得傳感器的支鏈的軸向力與輸入量之間的映射關(guān)系。 易證明,所建立的線性方程組系數(shù)矩陣的秩恒等于12,故fi具有唯一解。 同理可求得傳感器在9-4、9-3、12-6 構(gòu)型下支鏈軸向力的解。
3 正向運動學(xué)模型
并聯(lián)機構(gòu)的運動學(xué)正解指:在已知的支鏈長度的情況下,計算出質(zhì)量塊相對于基座的位姿正解。本節(jié)通過綜合運用四面體單元法和幾何約束法,計算傳感器四種構(gòu)型的運動學(xué)正解。
如圖3 所示,以9-3 構(gòu)型四面體B1b1b2b3為例,b1、b2、b3構(gòu)成四面體底面,li對應(yīng)于四面體側(cè)棱邊的長度,也是傳感器第i條支鏈的長度,且滿足關(guān)系式(13)。
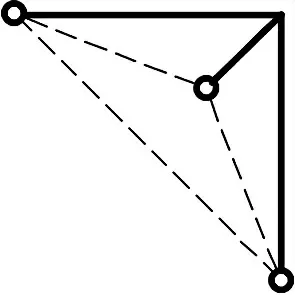
圖3 9-3 構(gòu)型四面體B1b1b2b3

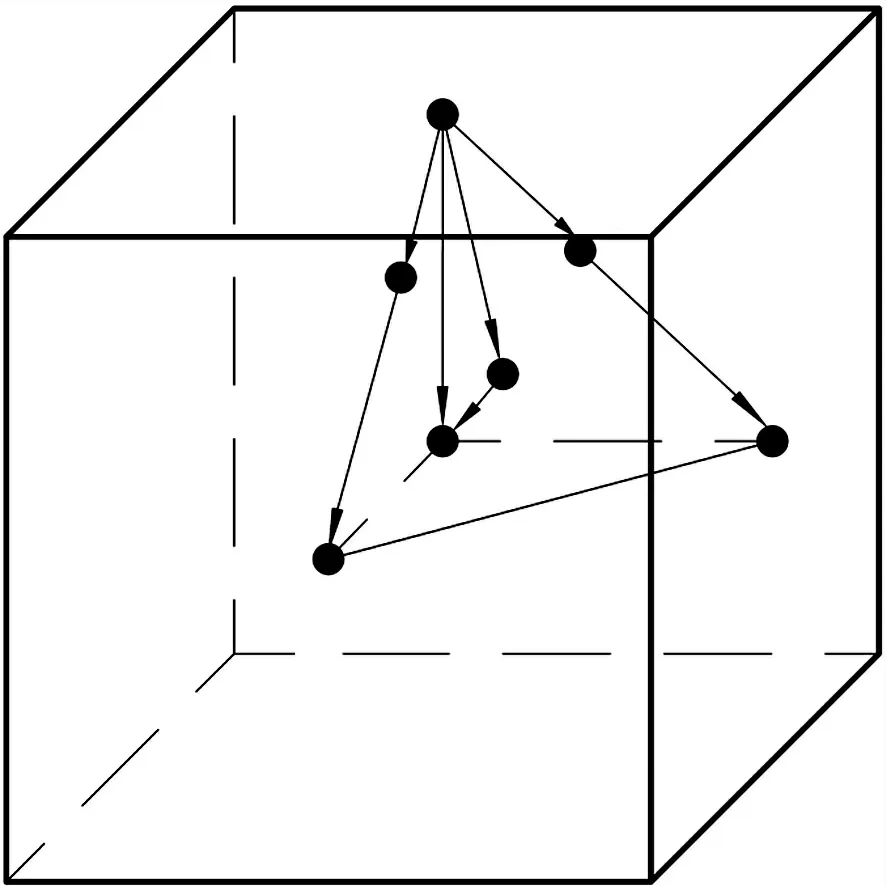
圖4 9-3 構(gòu)型位姿計算幾何模型
圖5 12-4、9-4 構(gòu)型位姿計算幾何模型
式中:
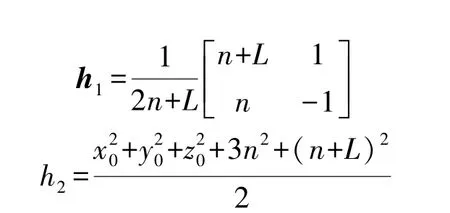
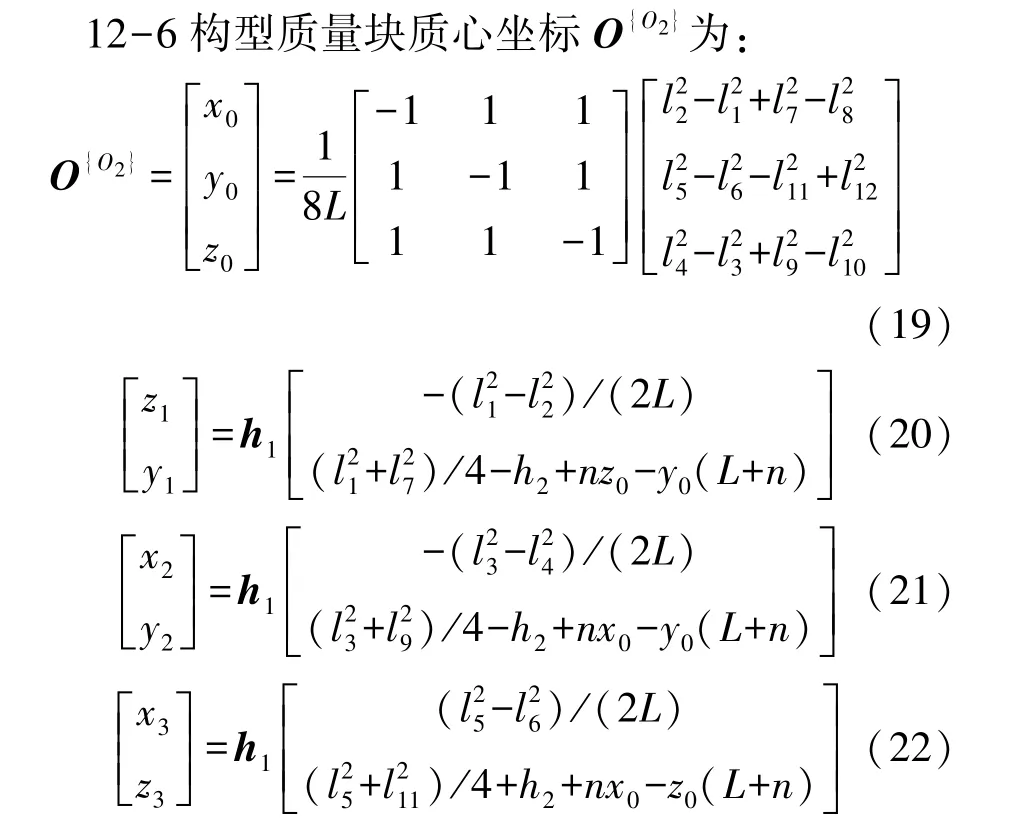
如圖6 所示,根據(jù)質(zhì)量塊上點O、B1、B2、B3的幾何位置關(guān)系有:
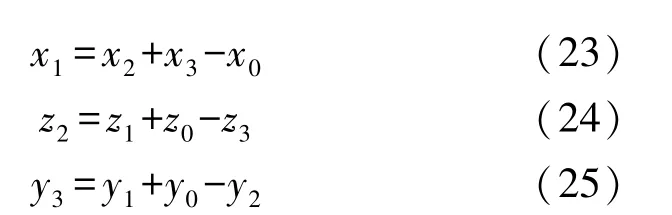
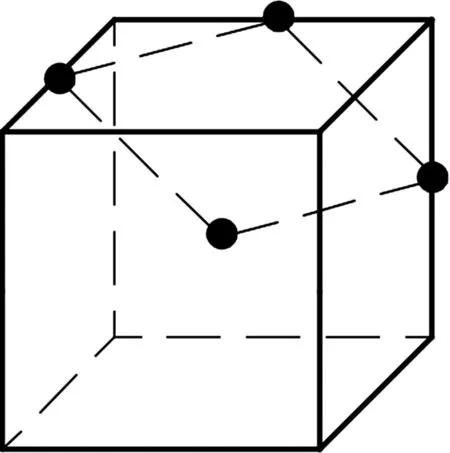
圖6 12-6 構(gòu)型位姿計算幾何模型


將傳感器各構(gòu)型由正向動力學(xué)求得的支鏈長度代入位置正解,即可得到由基座加速度表達的質(zhì)量塊相對于基座的位姿解析式。
4 奇異位形分析
4.1 雅可比矩陣的推導(dǎo)
采用Gosselin 奇異分析法分析傳感器的奇異位形。 在已知質(zhì)量塊在{O2}中的位置和姿態(tài)(x,y,z,α,β,γ)的情況下,求解各個支鏈長度li。 對支鏈長度表達式中的各變量x,y,z,α,β,γ求偏導(dǎo)數(shù)即可求得雅可比矩陣中的各個元素[15-16]。
由12-4 構(gòu)型桿長條件可以得到:
4.2 雅克比矩陣條件數(shù)的倒數(shù)的計算
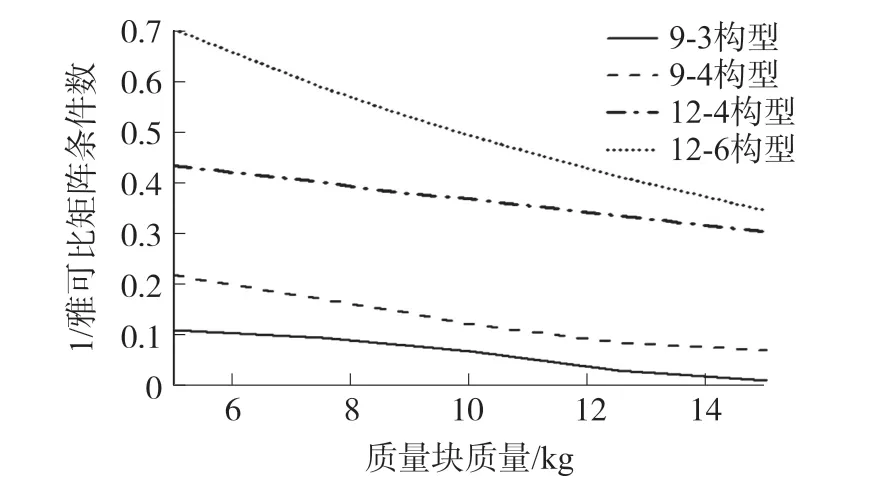
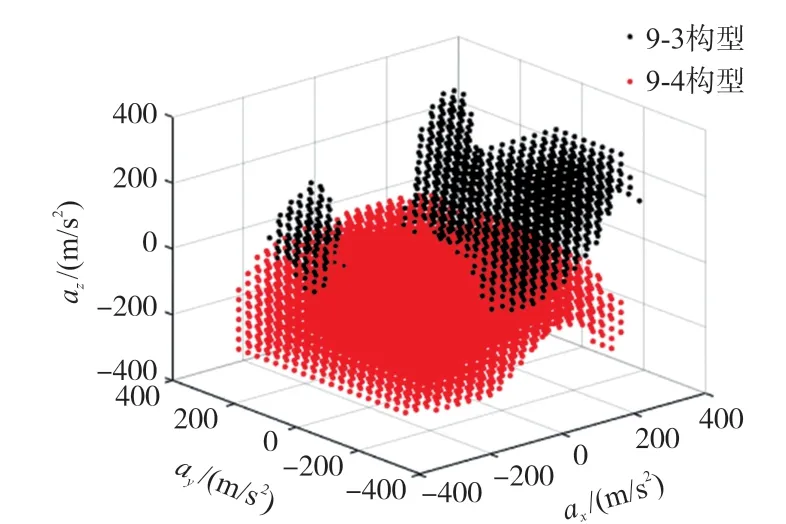
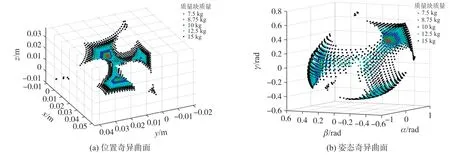
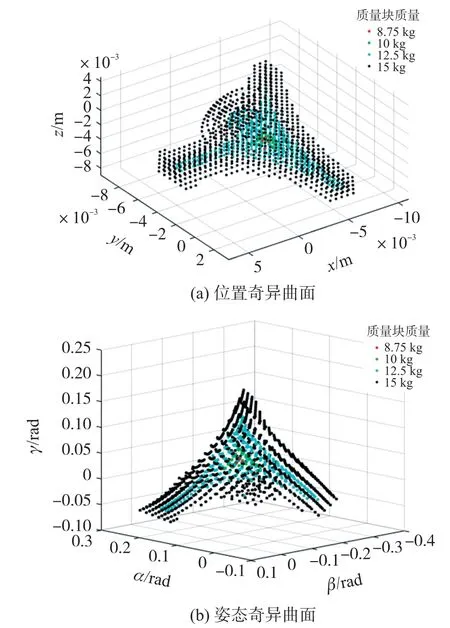
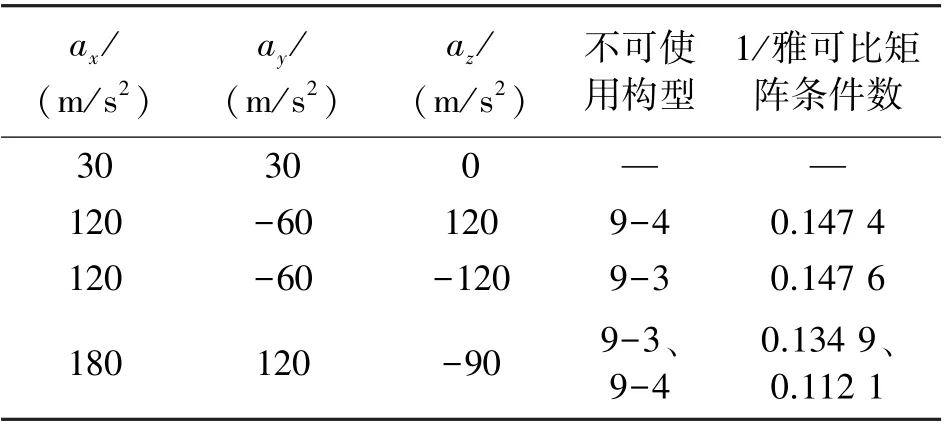
由矩陣理論可知,若雅克比矩陣J是一個m×n矩陣,其中m 雅可比矩陣條件數(shù)的倒數(shù)可用于評價機構(gòu)的控制精度、靈活性和各向同性[17]。 若該指標值越接近于1,則表明機構(gòu)中支鏈的分布越對稱,其受力越均衡。 此時,在對應(yīng)位姿下的并聯(lián)機構(gòu)也越靈活。 當雅可比矩陣條件數(shù)的倒數(shù)越接近于0,則此時彈性體結(jié)構(gòu)的位姿越接近于奇異位形。 觀察后發(fā)現(xiàn),雅克比矩陣的前三行是與支鏈方向有關(guān)的向量,是無量綱的;后三行元素與支鏈和質(zhì)量塊質(zhì)心間的距離有關(guān),具有長度量綱。 因此,矩陣JTJ的六個特征值無法從大到小排序。 為使雅克比矩陣的各行量綱統(tǒng)一,將雅可比矩陣的最后三行同除以特征長度,此時矩陣JTJ中各元素單位是無量綱的[18]。 本文將n視為特征長度。 計算當基座加速度在一定范圍內(nèi)時,四種構(gòu)型的雅可比矩陣條件數(shù)的倒數(shù)。 將由加速度信息表達的質(zhì)量塊質(zhì)心位置O{O2}及歐拉角α、β、γ代入支鏈長度表達式,即可求得用加速度表達的雅可比矩陣。本文將以質(zhì)心為參考點的反向雅可比矩陣視為標準雅可比矩陣,并將標準雅可比矩陣條件數(shù)的倒數(shù)小于0.15 的位形定義為奇異位形(奇異臨界值可根據(jù)實際計算結(jié)果作出調(diào)整)。 為計算傳感器在承受大幅值加速度情況下其雅可比矩陣條件數(shù)的倒數(shù),設(shè)定輸入加速度取值范圍如表1 所示。 表1 輸入加速度取值范圍 為研究傳感器奇異曲面與質(zhì)量塊的質(zhì)量之間的關(guān)系,本文計算了傳感器的質(zhì)量塊由5 kg 逐步增加至15 kg 時四種構(gòu)型的雅可比矩陣條件數(shù)的倒數(shù)。 傳感器結(jié)構(gòu)參數(shù)如表2 所示,重力加速度g取9.8 m/s2。 表2 傳感器結(jié)構(gòu)參數(shù) 在設(shè)定的輸入加速度范圍內(nèi),四種構(gòu)型雅可比矩陣條件數(shù)倒數(shù)的最小值隨質(zhì)量塊質(zhì)量的變化情況如圖7 所示。 當質(zhì)量塊的質(zhì)量越大,質(zhì)量塊與基座的相對運動越大,雅可比矩陣條件數(shù)的倒數(shù)的最小值越小,傳感器越有可能出現(xiàn)奇異位形。 對于12-6 與12-4構(gòu)型而言,在設(shè)定的輸入加速度范圍內(nèi),隨著質(zhì)量塊質(zhì)量逐漸增大,兩種構(gòu)型傳感器均未出現(xiàn)奇異位形。對于9-3、9-4 構(gòu)型,在保證傳感器靈敏度的前提下,應(yīng)盡量減小質(zhì)量塊的質(zhì)量以避免傳感器發(fā)生奇異。 圖7 雅可比矩陣條件數(shù)的倒數(shù)最小值變化圖 由雅可比矩陣條件數(shù)的倒數(shù)的計算結(jié)果可知,隨著雅可比矩陣條件數(shù)的倒數(shù)的減小,對應(yīng)的線加速度幅值逐漸增大,而角加速度無明顯的變化規(guī)律。進一步地,分別計算六個加速度變量與雅可比矩陣條件數(shù)的倒數(shù)之間的spearman 相關(guān)系數(shù)[19]。 當相關(guān)系數(shù)越接近于1 或-1,表明兩變量間相關(guān)性越大,計算結(jié)果如表3 所示。 結(jié)果表明:線加速度對雅可比矩陣條件數(shù)的倒數(shù)計算結(jié)果影響較大,而角加速度影響較小。 表3 spearman 相關(guān)系數(shù)計算結(jié)果 當雅可比矩陣條件數(shù)的倒數(shù)大于0.15 時,在m=10 kg 情況下,對應(yīng)的9-3 與9-4 構(gòu)型的輸入線加速度散點圖如圖8 所示。 由于在設(shè)定的加速度范圍內(nèi),角加速度對計算結(jié)果影響較小,不再列出角加速度散點圖。 由計算結(jié)果可知,9-3 構(gòu)型與9-4 構(gòu)型適用的輸入加速度范圍存在明顯的差異。 在Z軸方向,9-3 構(gòu)型可承受較大的正向線加速度,9-4構(gòu)型則與之相反。 圖8 9-3、9-4 構(gòu)型適用線加速度范圍 根據(jù)雅可比矩陣條件數(shù)的倒數(shù)的計算結(jié)果,9-3 與9-4 構(gòu)型的位置奇異曲面與姿態(tài)奇異曲面隨質(zhì)量塊質(zhì)量的變化如圖9、圖10 所示。 當傳感器質(zhì)量塊質(zhì)量越大,傳感器奇異曲面范圍也越大。 圖9 9-3 構(gòu)型位置奇異曲面、姿態(tài)奇異曲面 圖10 9-4 構(gòu)型位置奇異曲面、姿態(tài)奇異曲面 可重構(gòu)六維加速度傳感器可根據(jù)不同的工作環(huán)境重構(gòu)為不同的構(gòu)型。 若僅考慮避免使傳感器發(fā)生奇異,根據(jù)第4 節(jié)所得到的線加速度對雅可比矩陣條件數(shù)的倒數(shù)影響較大的結(jié)論,角加速度不予考慮。當m=10 kg 時,表4 列出幾組傳感器在輸入不同的線加速度情況下應(yīng)避免使用的構(gòu)型。 表4 可重構(gòu)六維加速度傳感器構(gòu)型選擇 本文對可重構(gòu)并聯(lián)式加速度傳感器的四種構(gòu)型建立了正向動力學(xué)方程、正向運動學(xué)方程,求出了由輸入加速度信息表達的質(zhì)量塊相對于基座的位姿解。 進一步地,使用Gosselin 法分析了四種構(gòu)型的奇異位形。 結(jié)果表明,傳感器12-4、12-6 構(gòu)型可承受較大的輸入加速度。 9-3、9-4 構(gòu)型為避免發(fā)生奇異,其適用的加速度范圍相對較小且范圍存在差異,即在Z 軸方向,9-3 構(gòu)型可承受較大的正向線加速度,9-4 構(gòu)型則與之相反。 此外,當質(zhì)量塊的質(zhì)量越大,構(gòu)型奇異曲面范圍也越大。 如若傳感器承受較大的輸入加速度,在保證傳感器靈敏度的前提下,應(yīng)盡量減小質(zhì)量塊的質(zhì)量。




5 應(yīng)用實例
6 結(jié)論
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年10期)2022-11-10 09:37:42
中學(xué)生數(shù)理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學(xué)生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(shè)(2018年6期)2018-04-22 03:16:54
產(chǎn)品可靠性報告(2017年7期)2017-09-05 09:49:12
中學(xué)生數(shù)理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54