垃圾識別分類系統研究與探索*
2021-03-11 03:10:04王小軍
電子器件 2021年6期
王 珂,和 莉,趙 慧,王小軍,郝 喆
(江蘇開放大學信息化建設處,江蘇 南京 210036)
全球的廢棄電器和電子設備(Waste Electrical and Electronic Equipment,WEEE)大約每年會產生3 000 萬噸到5 000 萬噸的電子垃圾,雖然電子垃圾具有很高的回收價值,但大多數電子垃圾也含有必須從城市垃圾流中分離出來的有害物質。垃圾回收機構提供了不同的收集方式,包括在超市和電器電子設備商店收集,市政收集中心、路邊收集,家庭收集等等。特別是在城市中心,按需收集電子垃圾可能更符合城市的垃圾回收策略。印度和中國已經對基于互聯網的垃圾回收服務進行了調查,新興技術和電子商務已成為電子廢棄物回收領域的新趨勢。在國內,Zhang 等[1]調查了居民選擇智能設備進行電子垃圾回收的關鍵驅動因素和障礙。他們發現,智能設備并沒有被居民普遍接受,并且態度、主觀規范,以及對智能設備便利性的感知與使用的意愿呈正相關。
智能手機和移動應用設備無處不在,在當前的“信息社會”中有著廣泛的應用,然而,支持垃圾回收的移動應用程序相對有限。其功能主要用于尋找廢物收集站的位置,或設置有關收集時間的提醒。一項使用基于物聯網的垃圾收集應用程序[5]的研究還包括了其他功能,比如車輛路線規劃等。在許多情況下,居民無法給垃圾回收公司提供精準的數據,在收集點,如果有過多的廢棄設備需要回收,或者該設備的尺寸過大,將會給回收公司增加回收難度。
如圖1 所示,從個人處理報廢設備的角度以及垃圾回公司的角度概述了WEEE 的優先處理次序。需要考慮所收集設備的類型、尺寸和數量,這些數據是整合垃圾回收策略的組成部分,該計劃中使用的車輛和人力資源,是回收成本和運輸費用的主要因素。按需回收垃圾主要針對中大型垃圾項目,要整合車輛資源和優化路徑。
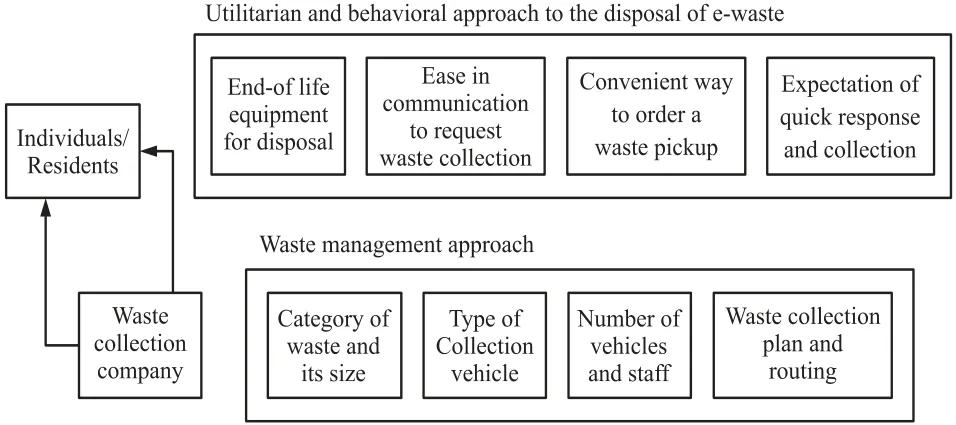
圖1 個人與垃圾回收公司優先處理策略
深度學習技術采用直接從圖片數據進行特征識別,在眾多圖片檢測和目標分類中取得了巨大的進步,目標檢測與識別已廣泛應用于機器人、電子產品、道路安全、自動駕駛、智能交通系統和文本識別等人工智能系統中,其主要技術手段是利用視覺識別算法來識別目標的類型和尺寸,基于圖片識別的目標檢測是識別圖片中是否出現了特定的目標,確定檢測目標之后,使用特殊的可調節框架確定其位置和大小。
在本文研究中,探索了一種新的垃圾回收系統,主要是促進個人與垃圾回收公司之間數據的精準交流。提出了一種新穎的方法來識別和分類廢物設備[2]。該算法主要采用具有深度學習特性的神經網絡,基于區域的深度卷積神經網絡檢測圖片中廢物設備的類別和大小。
1 相關研究工作
1.1 電子垃圾圖片識別系統
一種新穎的WEEE 收集規劃系統方案包括廢物設備的識別和分類,如圖2 所示。首先把準備處置的廢物設備拍攝成單獨的照片,然后將照片上傳到后臺識別廢物設備的圖片識別服務器上。根據智能手機的性能,這個系統也可以作為一個移動應用程序的APP。然后在識別和分類電子廢物后,垃圾回收公司會根據廢物的大小和類別制定有效的回收計劃。其中規劃過程可以進一步應用人工智能算法,為垃圾回收車輛提供最優路徑[3]。
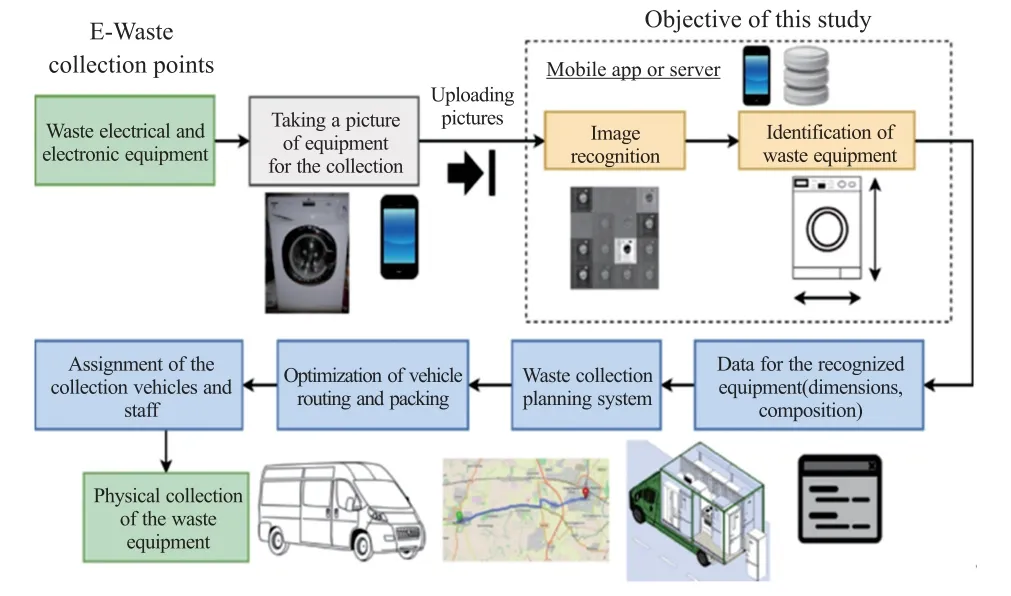
圖2 WEEE 收集規劃系統總體方案
1.2 基于深度學習的電子垃圾識別
深度學習是用于建立和模擬人腦進行分析學習的神經網絡,并模仿人腦的機制來解釋數據的一種機器學習技術,深度學習最大的意義就在于能夠提取對象的特征,機器學習直接從數據中“學習”信息,而不依賴預先確定的方程作為模型。本文提出的基于深度卷積神經網絡CNN 電子垃圾識別模型[4],如圖3 所示。

圖3 基于深度卷積神經網絡分類器模型
模型輸入包含選定類別的電子垃圾的圖片。在本文的研究中,選擇了家庭中常用的三種電器和電子設備:冰箱、洗衣機、監視器或電視機。每種設備都有自己獨特的特征,其中模型的輸出類別是三類。深度卷積神經網絡CNN 可以分為兩個主要的功能模塊:特征學習模塊、分類模塊。特征學習模塊主要由交替卷積層和池化層組成,卷積層對輸入的h×b×c(圖像高度h×圖像寬度b×通道數c)圖片x進行了2D 卷積,具有m個不同的濾波器。輸出是c個通道的特征圖y。
式中:bk是偏差;Wi,j,p,q是濾波器尺寸為kh×kb的第q層權重;i=1,2,…,h;j=1,2,…,b;p=1,2,…,c;q=1,2,…,m。
二維卷積層將滑動卷積濾波器應用于輸入層,該層通過沿輸入方向的垂直和水平方位移動濾波器對輸入進行卷積,計算權重和輸入的點積,然后加上一個偏置項[5]。池化層主要負責空間子采樣,它進行一個特殊的二維卷積,步長大于1,通常等于濾波器的大小。該網絡中的最大池化層如下式所示:

式中:h是輸入圖像的高度;b是輸入圖像的寬度;y是尺寸為hp×bp的池化結果;i=1,2,…,hp;j=1,2,…,bp;q=1,2,…,m。
特征學習模塊的每一層都將前一層的輸出作為輸入,從而形成一個分層特征映射,將原始像素數據轉換為多層特征向量。分類模塊由全連接層組成,該方法利用最高層次的特征向量作為單隱藏層前饋神經網絡分類器。對于分類任務,輸入大小通常是訓練圖片的大小[6]。使用的圖片為RGB 格式,大小為128 pixel×128 pixel。
1.3 基于深度卷積神經網絡分類結果
采集了一組廢棄電器設備的照片進行分類。這組數據包括不同型號的冰箱、洗衣機和電視機,如圖4 所示為相關數據圖片。

圖4 訓練數據部分樣圖
該網絡使用1 800 張圖片進行訓練,分為3 類,每類600 張,然后選取300 張測試圖片,每類100 張進行測試。其中,數據集的制作采用網絡爬蟲和人工拍攝的方式,為了保證圖片類別的準確性,所有圖片都經過人工預處理。測試圖片不是訓練集的一部分,為提高訓練和測試的準確率[7],對圖片進行方形裁剪。每個圖片包含一個廢物物品(冰箱、洗衣機、電視機、顯示器),圖片縮放到128 pixel ×128 pixel。采用不同的卷積神經網絡結構,測試了卷積神經網絡包含的3 個卷積層。在3 個方面對深度卷積層結構進行了修改:濾波器的數目,濾波器的大小,以及圖片輸入的大小。使用系統的方法來確定濾波器的大小,卷積層c1 濾波器的大小為7×7,9×9,和11×11,卷積層c2 濾波器的大小為7×7,5×5,和3×3,卷積層c3 濾波器的大小為3×3。逐步改變濾波器的大小和數量,訓練步長范圍是1 到4,進行訓練得到新的參數,重復訓練5 次,對訓練結果進行評估,選擇性能最好的一組濾波器。
2 實驗分析
2.1 選定類別電子垃圾分類結果
表1 中給出了2 種深度卷積神經網絡的詳細配置參數,網絡的Padding 卷積層分別為0、1、1,FS 是濾波器的大小,FM 是特征圖,MS 是特征圖的尺寸,最大池化層是3×3 的濾波器,并且在測試的過程中對洗衣機、冰箱和顯示器使用C1、C2 和C3 卷積層特征可視化,如圖5 所示。利用該方法對3 類電子垃圾設備進行了檢測和分類,平均準確率為90%到96.7%,其準確率的波動取決于參數的配置和訓練數據量的大小,分類結果的混淆矩陣如圖6 所示。
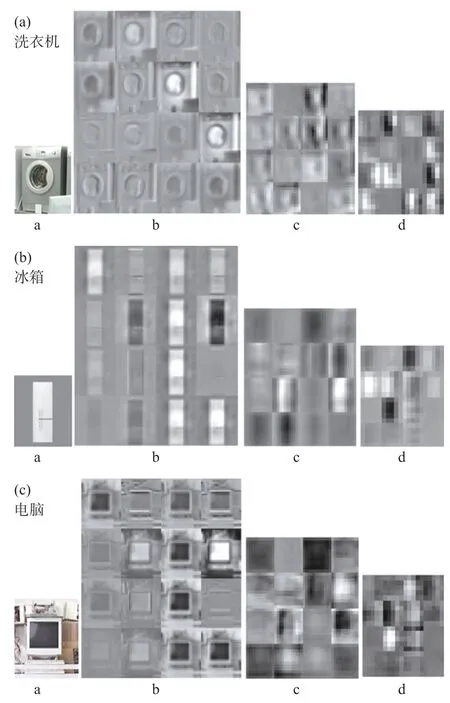
圖5 CNN2 卷積神經網絡輸出特征可視化
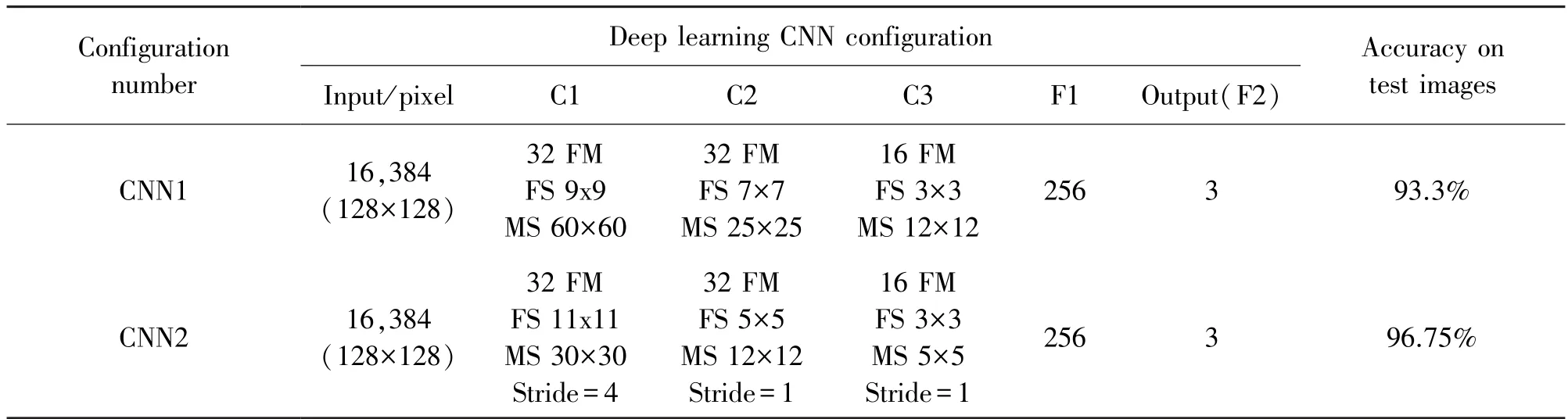
表1 兩種深度卷積神經網絡結構的分類結果
在混淆矩陣圖6 中,行對應于預測的輸出類,列對應于真實的目標類。對角線單元對應于已正確分類的預測值,非對角線單元對應于未正確分類的預測值。圖6 最右邊的一列顯示了預測每個類中所有已測試圖片中正確和不正確的分類百分比[8-10]。圖6 底部的一行顯示了屬于每個類的所有圖片的正確分類和不正確分類的百分比,圖6 右下角的單元格顯示了總體準確率。該方法只允許識別圖片中的一個對象,并對圖片尺寸大小有要求。
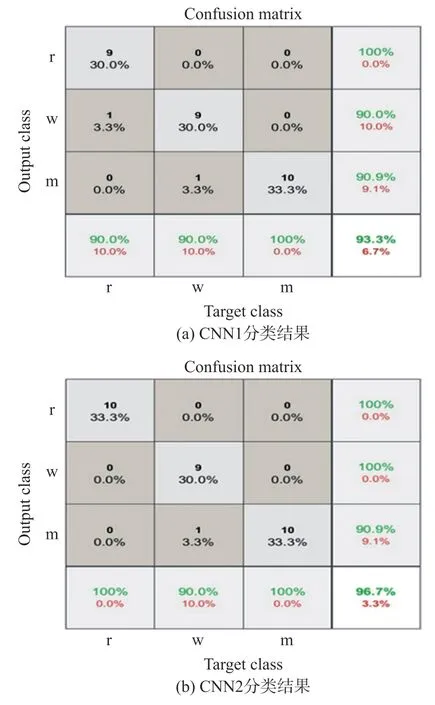
圖6 卷積網絡CNN1 和CNN2 對三類垃圾進行分類的結果
2.2 多目標分類識別
Faster R-CNN 算法利用了卷積神經網絡來提取輸入的垃圾圖像特征圖,然后再通過共享卷積層將該特征圖分別送入Faster R-CNN 網絡和區域提議網絡中,算法框架如圖7 所示。采用Faster R-CNN網絡在一幅圖片中同時識別多個物體,Faster RCNN 網絡可以選擇要處理的區域并確定如何對這些區域進行分類,并且在識別多個目標的同時還可以識別物體的尺寸[11-12]。使用CNN 作為基礎網絡的Faster R-CNN 目標檢測網絡包含3 個卷積層,濾波器大小為5×5,3×3 和3×3,并對其他的網絡參數進行調整(濾波器數量、層數、完全連接層中的神經元個數、最大循環數),網絡訓練有多個階段,每個階段學習完成的條件為10 個epoch,以達到最佳效果。
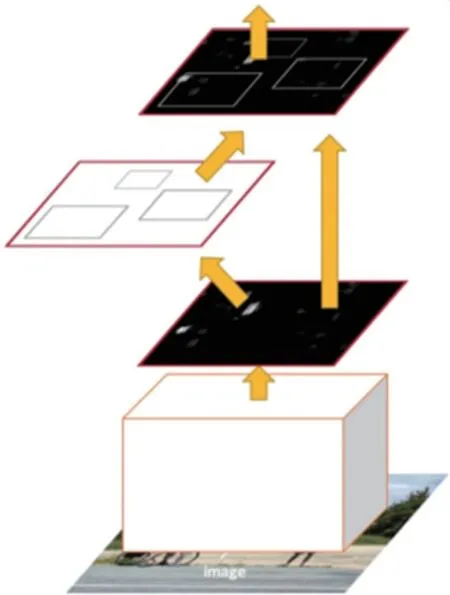
圖7 Faster R-CNN 算法框架
廢物設備的圖片可以包含一種、兩種或三種類型的廢物,以及幾件相同的設備,或相同類別的設備。設備類型的識別是電子垃圾收集規劃的第一步,確定對象的大小是關鍵,WEEE 收集計劃要求指定一輛能夠裝載客戶要求處理的所有廢物設備的車輛,電子垃圾報告的自動化系統既方便客戶拍照并發送照片,也方便收集公司服務器的后臺處理,上傳的所有照片都可以被識別并按類別和大小進行分類,圖8 是多目標識別對象的示例。該方法的準確率平均為90%,洗衣機圖片識別為100%,冰箱圖片識別為80%。CNN 網絡比R-CNN 網絡更能準確地識別物體。Faster R-CNN 的優點是能準確識別目標的大小[13-14],圖9 為網絡采用四折交叉驗證算法進行驗證,經過了400 個epoch 評估測試。從圖中可以看出,當訓練模型在200 個epoch 時曲線趨于平穩,性能最優。圖10 是訓練過程的Loss 曲線,可以看出網絡能夠迅速收斂,沒有出現大幅度震蕩和過擬合,說明網絡結構設計較為合理。

圖8 Faster R-CNN 多目標檢測結果
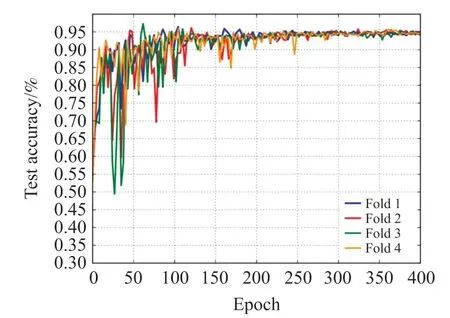
圖9 卷積神經網絡四折交叉驗證準確率測試
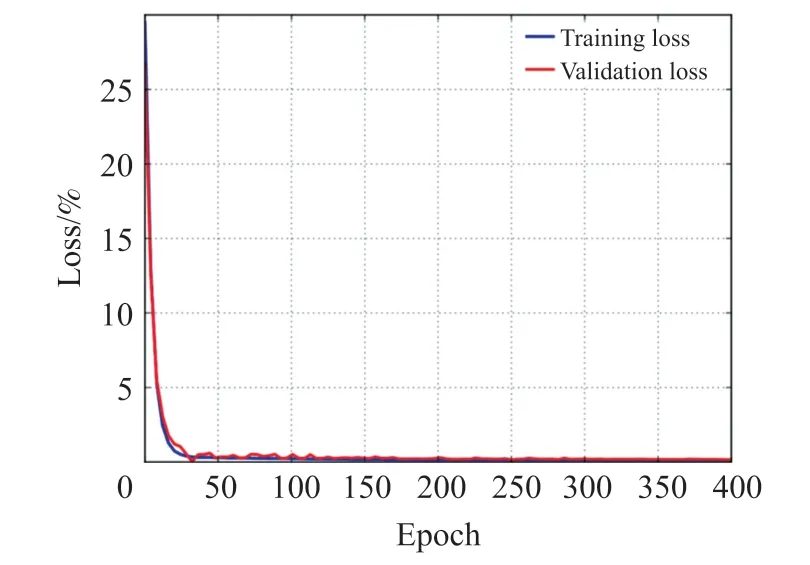
圖10 訓練過程的Loss 曲線
深度學習的研究需要很高的硬件配置環境,尤其是對實驗機器的顯卡性能和內存要求極高,所以本實驗使用1080Ti 顯卡和64 Gbyte 的DDR4 內存,該配置具有極強的處理性能。
3 結論
本文提出了一種新的電子垃圾圖片識別和分類方法,利用CNN 對電子垃圾類型進行分類,并利用Faster R-CNN 對圖片中垃圾設備的類別和大小進行檢測,采用的分類識別算法具有較高的識別率。由于數據量不充足,可通過對數據量進行擴充,進一步提高模型的準確率和魯棒性。基于深度學習CNN和Faster R-CNN 網絡識別廢物設備的準確性為90%到96.7%。相比之下Faster R-CNN 網絡的準確性較低(90%),但可以進行識別并確定圖片中目標的大小。這種用于識別廢物的新方法為數字化的解決方案提供思路,利用智能手機的拍照上傳功能,從而可以根據客戶圖片識別報告選擇收集的設備。后續的研究會考慮識別和分類多種廢物設備,并改進網絡模型提高系統的整體性能。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
