2020年上汽通用雪佛蘭開拓者牽引力故障燈點亮
2021-03-11 02:48:10北京姜楠
汽車維修與保養 2021年11期
關鍵詞:故障
◆文/北京 姜楠
故障現象
一輛2020年生產的上汽通用雪佛蘭開拓者SUV,VIN碼為LSGNV83L9LS******,行駛里程為2313km,該車儀表臺上牽引力故障報警燈點亮。
故障診斷與排除
接車后首先確認故障現象,發現儀表臺上的牽引力故障燈常亮。連接診斷儀調取故障信息,發現故障車記錄有20多條故障碼,且全都是與網絡通訊故障相關的U類故障碼,故障碼狀態都顯示“歷史”或“通過/未運行”,但沒有當前的故障。清除故障記錄后在廠區內試車,儀表臺上的牽引力故障燈再次點亮,再次讀取故障信息,仍然記錄有10多條故障碼。與之前的故障記錄基本相同。嘗試在眾多故障碼中尋找突破點,發現在多個模塊中都記錄有故障碼U0077-控制模塊通信底盤擴展CAN總線斷開,于是決定將故障碼U0077作為突破口。查閱維修手冊,并調取與故障碼U0077有關的診斷信息和程序內容如圖1所示。
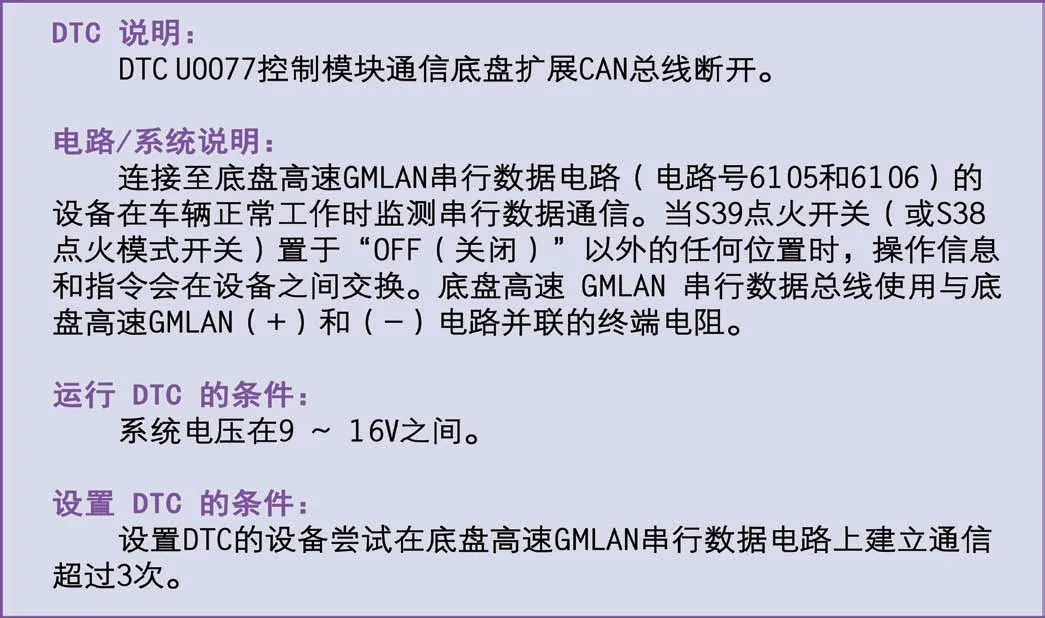
圖1 維修手冊上與故障碼U0077相關的診斷信息
查閱并分析維修手冊中關于底盤GMLAN網絡的電路圖(圖2),決定先并線測量CAN+和CAN-的對地電壓,CAN+電壓為2.7V、CAN-電壓為2.3V,都在正常范圍內。考慮到故障出現在車輛行駛過程中,原地測試無法使故障再現,需要進行動態波形捕捉,但店內沒有示波器。正在為沒有合適的診斷工具而發愁時,筆者從工具間找到了一塊帶有數據監測和捕捉功能的“福祿克87V”萬用表(圖3),利用萬用表的MAX/MIN(最大/最小)數據捕捉功能對線路進行監測。連接好萬用表在廠區內試車,當故障出現后停車查看MAX和MIN數值,CAN+的MAX電壓為3.5V、MIN電壓為2.5V,正常。CAN-的MAX電壓為2.5V,正常;MIN電壓為0.1V,異常。正常情況下CAN-的MIN電壓應不低于1.5V,這說明該車的故障原因是由于底盤高速GMLAN網絡的CAN-和負極存在短路而造成的。
根據故障車型底盤GMLAN 網絡電路圖(圖2)的線路走向對電路進行拆分,并逐段監測相關數據。為便于測量,先從K56模塊開始,斷開X2插頭后高速GMLAN和底盤GMLAN的網絡都將失去通訊。考慮到故障要在車輛行駛過程中才能再現,為了不影響車輛的正常行駛,在斷開K56模塊的X2插頭(圖4)后,跨接X2插頭的4號腳到14號腳、5號腳到15號腳(圖5),這樣斷開X2插頭后高速GMLAN網絡仍能正常通訊。連接好萬用表,在行駛過程中動態監測X2插頭的9號腳和19號腳的對接地電壓。19號腳的MIN電壓值為1.1V,正常;9號腳的MIN電壓值為0.1V,異常,正常值應為1.1V。
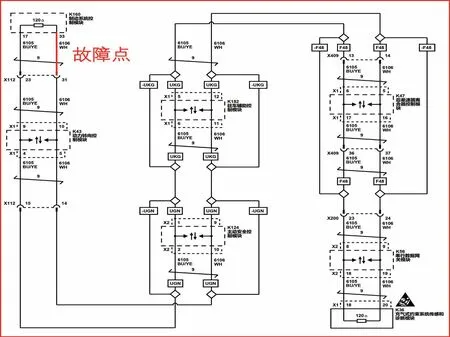
圖2 故障車型底盤GMLAN網絡電路圖
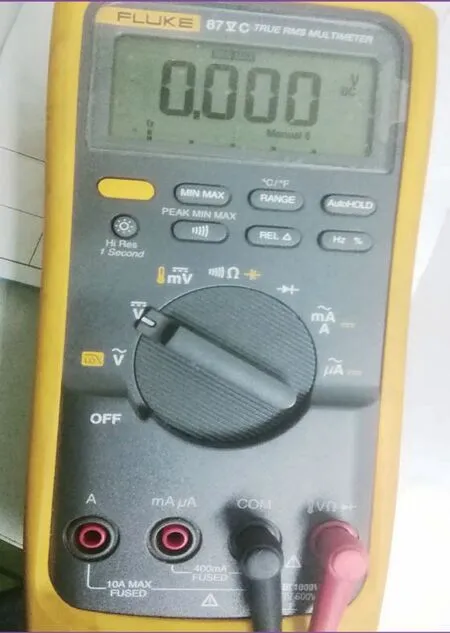
圖3 福祿克87V萬用表
根據故障車型底盤GMLAN網絡電路圖(圖2)的線路走向再次對電路進行拆分,首先恢復K56模塊的X2插頭及相關線路連接,然后斷開K124主動安全控制模塊的X2插頭(圖6),并連接好萬用表,在行駛過程中動態監測X2插頭的9號腳和10號腳的對接地電壓。9號腳的MIN電壓值為1.1V,正常;10號腳的MIN電壓值為0.1V,異常,正常值應為1.1V。這樣,故障范圍被進一步縮小了。
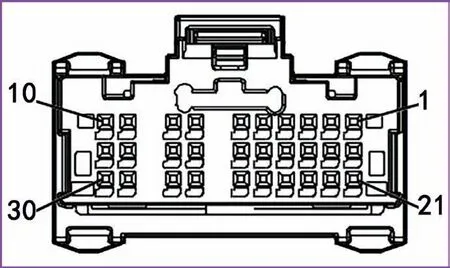
圖4 故障車K56模塊的X2插頭
接下來,準備斷開X112插頭后監測相關線路的數據。由于X112插頭位置比較隱蔽(圖7),需要拆卸蓄電池底座。在拆卸時發現相關的線束(圖8)有被擠壓的痕跡,將擠壓的線束剝離后發現導線的絕緣外層已經損壞,且該線束與車輛的縱梁有接觸的痕跡(圖9)。

圖5 對故障車K56模塊的X2插頭進行跨接
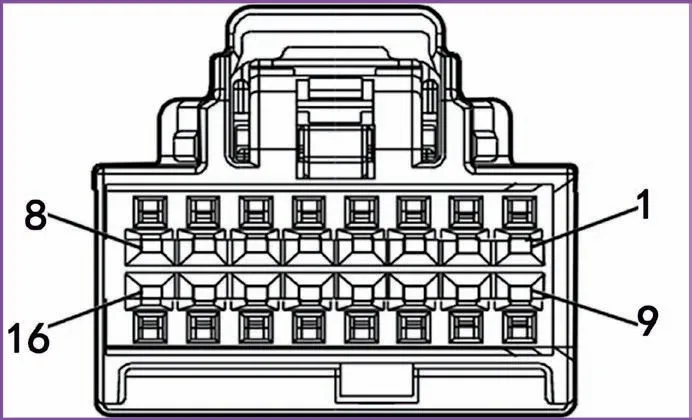
圖6 故障車型K124主動安全控制模塊的X2插頭
通過檢查發現,故障車上破損的線束為K160制動系統控制模塊33號腳到X112插頭31號腳之間的電路(圖1中線號6106,白色)。
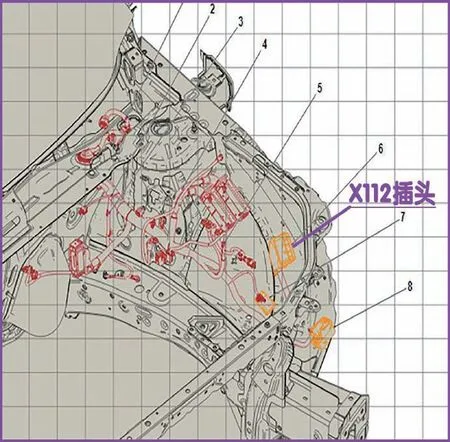
圖7 故障車型X112插頭的安裝位置

圖8 故障車上被擠壓的線束
由于故障車還在質保期內,按照《家用汽車產品修理更換退貨責任規定》的要求,對發動機艙的線束總成進行更換后試車,故障現象沒有再現,該車恢復正常,故障被徹底排除。

圖9 故障車上破損線束與縱梁接觸
維修小結
本案例中,故障車的故障原因是由于車輛的線束與周邊部件之間存在干涉,經過長時間的接觸摩擦,線路的絕緣外皮出現破損,車輛在行駛過程中,相關線路與負極出現短時間短路導致的。
該車故障診斷的難點在于,這種動態偶發性故障給數據監測造成了很大的困難。好在筆者合理且充分地挖掘了手上現有診斷工具的功能,同時結合電路圖逐步縮小故障范圍,最終鎖定故障點,并解決問題。
本案例為動態偶發性故障提供了新的數據監測手段。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
