智能管道定位系統設計
2021-03-10 01:51:38陳瑞東秦會斌
智能物聯技術 2021年3期
陳瑞東,秦會斌,葉 晨
(杭州電子科技大學 新型電子器件與應用研究所,浙江 杭州 310018)
0 引言
排水管網與市民的生活質量、城市的經濟發展和工業生產密切相關。地下排水管道的運行故障將會直接造成水資源的浪費以及城市內澇等問題。高精度的定位技術可以實時監控城市管道使用過程發生的位移情況, 提高城市排水管道搶修效率,為管道穩定運行提供保障。
20 世 紀 60 ~90 年 代 之 間 , 全 球 定 位 系 統(Global Positioning System,GPS) 被研制并逐漸走向成熟[1],其定位精度越來越高,這使得無線定位技術產生革命性的發展。 當前,已經有多種定位方法被開發并投入使用, 如全球導航衛星系統(Global Navigation Satellite System,GNSS)、 蜂窩網定位技術,以及以無線局域網(Wireless Fidelity,WiFi)、低功耗藍牙(Bluetooth Low Energy,BLE)技術、超寬帶(Ultra Wide Band,UWB)等為代表的室內或小范圍環境的定位系統[2]。 北斗衛星導航定位系統是我國自主研發并且獨立運行的衛星導航系統。 與目前的全球定位系統相比, 北斗衛星導航定位系統的信號強度和定位精度更高[3]。 根據《北斗衛星導航系統發展報告 (4.0 版)》, 北斗系統已完成全球覆蓋,且在亞太地區定位精度可達水平5 米、高程5米(95%)。
本文研究的智能管道定位系統基于北斗定位技術,結合信號處理電路,完成地下水管位置的確定,并通過NB-IoT 網絡將定位系統檢測到的管道定位信息打包發送至云平臺, 再通過Web 應用軟件實現前端和后端的解耦。該系統能夠提升城市管道的安裝與維護能力,使城市管道的維修變得更加便捷,形成工程化應用示范,并推動管道產業由中低檔單純排水管道產品向高端智能化管道產品的升級。
1 系統結構設計
1.1 總體結構
智能管道定位系統的總體結構如圖1 所示。本系統主要采用終端GNSS 傳感器實時采集管道的位置信息,依托中國電信NB-IoT 網絡,再通過IoT云平臺將系統檢測到的管道信息打包發送至Web應用軟件,在上位機上實時顯示采集的管道位置信息,實現管道監控。
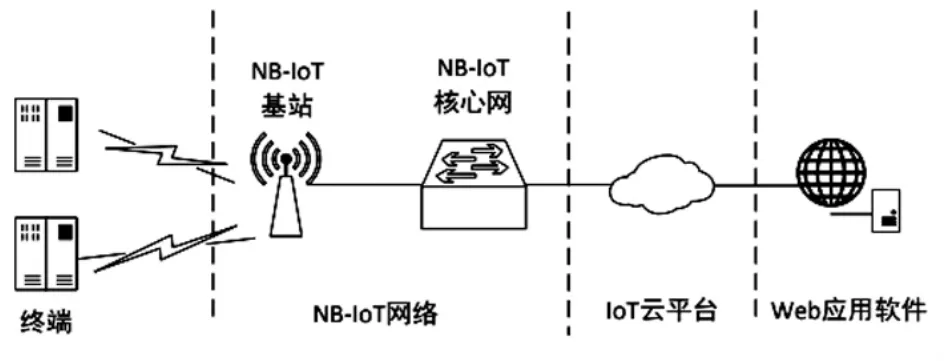
圖1 系統總體結構Figure 1 The overall structure of the system
1.2 北斗衛星定位
北斗衛星導航系統是中國著眼于國家安全和經濟社會發展需要,自主建設運行的全球衛星導航系統,是為全球用戶提供全天候、全天時、高精度的定位、導航和授時服務的國家重要時空基礎設施[5]。衛星定位技術基于測距交會原理,并通過空間分布的衛星以及衛星與地面間距離等數據交會出地面點位置,如圖 2 所示。
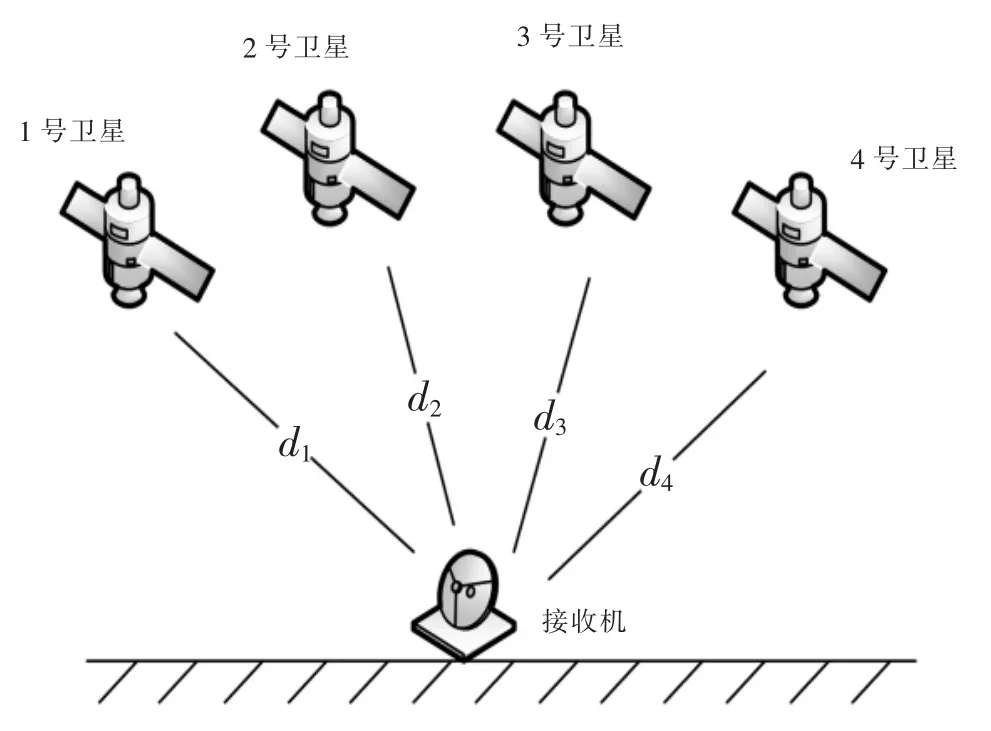
圖2 衛星定位示意圖Figure 2 Schematic diagram of satellite positioning
假定接收機周邊空間共分布著4 顆衛星,且位置已知。衛星在運行過程中每隔時間T 發出一個偽隨機測距碼信號,接收機接收到信號后,將其與自身的復制碼進行相關處理,得到信號相關系數:

式中:a(t-ΔTtrans)為接收到的衛星信號,a(t+ΔT-ΔTdelay)為接收機產生的復制碼,R(ΔTdelay)為信號自相關系數,T 為測距碼信號的周期,ΔTtrans為衛星信號的傳播時間,ΔT 為接收機時鐘與衛星時鐘的鐘差,ΔTdelay為復制碼的延時時間。
若信號間的自相關系數R(ΔTdelay)≠1,調節復制碼延時時間 ΔTdelay,直至相關系數 R(ΔTdelay)≈1。不考慮鐘差時間的情況下,信號對齊后,延時時間ΔTdelay可近似為衛星信號的傳播時間 ΔTtrans。 理想情況下,信號在空氣中的傳播速度近似于光速c,衛星與接收器間的測量距離,又稱為偽距,即為信號的傳播時間 ΔTdelay與光速 c 的乘積, 如式(2)所示。

根據測量學的測量交會原理,若空間中存在3個位置已知的控制點,且控制點與目標點的距離確定的情況下,分別以各控制點為圓心,距離為半徑劃圓,圓的交匯點即目標點位置,如圖 3 所示。

圖3 衛星定位測量交會Figure 3 Satellite positioning measurement rendezvous
考慮到接收機與衛星之間存在鐘差ΔT, 實際應用中,衛星配備精度極高的原子鐘。 如北斗三號的氫原子鐘,每百萬年偏差僅一秒;接收機上的石英鐘穩定性一般, 通常認為鐘差主要來自于接收機的時鐘。 為了修正鐘差對定位精度帶來的誤差,除測量交會原理的三組數據外, 還需提供一組數據才能得出準確的接收機位置。 假定衛星坐標分別為(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)和(x4,y4,z4),可得式:

由式計算可得出坐標數據,最終確定接收機的位置。
北斗衛星導航系統提供B1、B2 和B3 三頻信號服務[4],其中,B1 頻段的中心頻率為 1561.098MHz,B2 為 1207.14MHz,B3 為 1268.52MHz。 為保證信號能夠被正常接收, 接收機天線需滿足表 1 要求的規格。
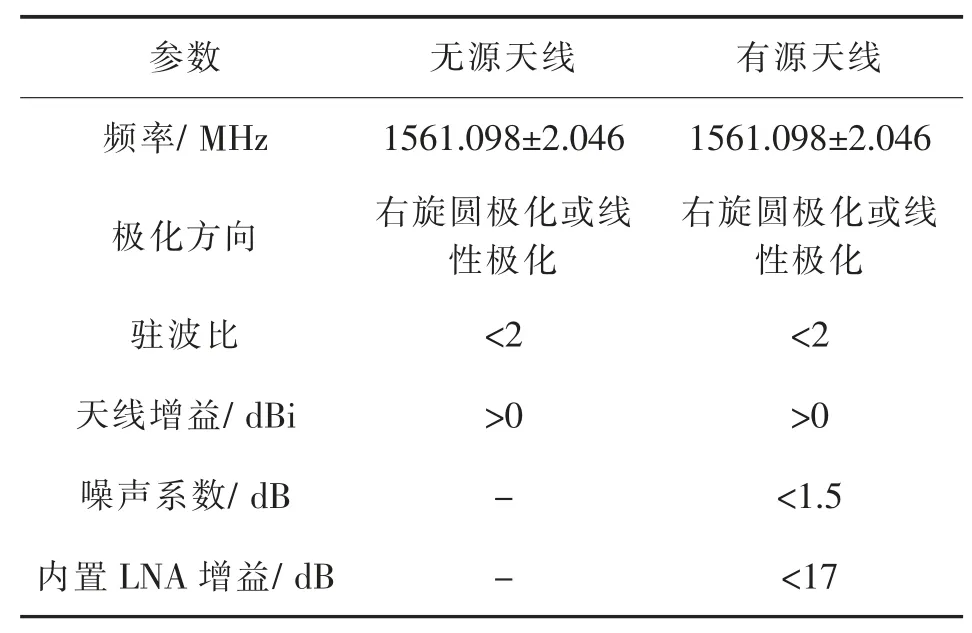
表1 天線規格Table 1 Antenna specifications
1.3 NB-IoT 網絡架構設計
城市管道數目眾多且分布于城市地下不同位置,無法通過人工進行監控。 因此需要管道定位系統將數據發送至Web 端, 從而反映管道的當前位置。 數據通信采用NB-IoT 技術,該技術具有廣覆蓋、低功耗、低成本、節點布置簡單等優勢,因此在城市管理中得到了廣泛應用。
NB-IoT 網絡傳輸系統采用了基于4G LTE 的核心網架構,并結合物聯網大連接、低速率、低功耗和廣覆蓋等要求進行了網絡架構和處理流程上的優化。具體網絡架構如圖4 所示。NB-IoT 終端通過空口連接到基站,然后通過S1 接口與核心網相連。網絡側與 LTE 網絡相同, 包含 S1、S5/S8、S6a、S11和Uu 接口,僅針對物聯網進行了優化;業務平臺接口中的T6 接口實現MME 和SCEF 之間非IP 數據的傳輸。為了提升小數據傳輸效率,NB-IoT 系統對現有LTE 處理流程進行了相關優化, 其中包括C-SGN 支持控制面優化傳輸方案和用戶面優化傳輸方案這兩種優化的小數據傳輸方案和僅為高效的小分組數據保留必要的安全流程等。
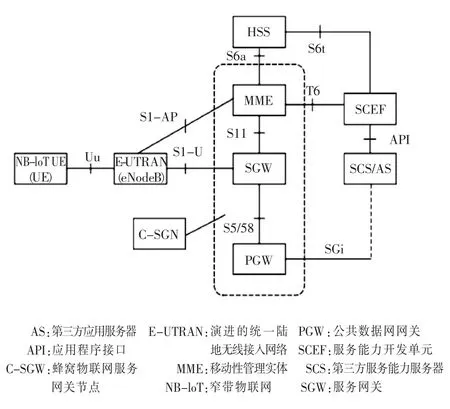
圖4 NB-IoT 網絡架構Figure 4 NB-IoT network architecture
1.4 系統管理軟件設計
Web 應用軟件,主要實現用戶管理、數據存儲和數據可視化等功能, 可以將GNSS 傳感器檢測到的信息通過可視化的形式在軟件中顯現出來, 以顯示管道當前的位置。Web 應用軟件采用瀏覽器/服務器(Browser/Server,B/S)架構開發,基于 Java 語言,采用模型—視圖—控制器 (Model View Controller,MVC)設計框架,設計模型、視圖組件和控制器。
2 系統搭建與測試分析
2.1 定位模塊
地下水管的定位模塊選用基于北斗定位技術的低功耗芯片,結合信號處理電路,完成定位。其定位模塊實物如圖5 所示。
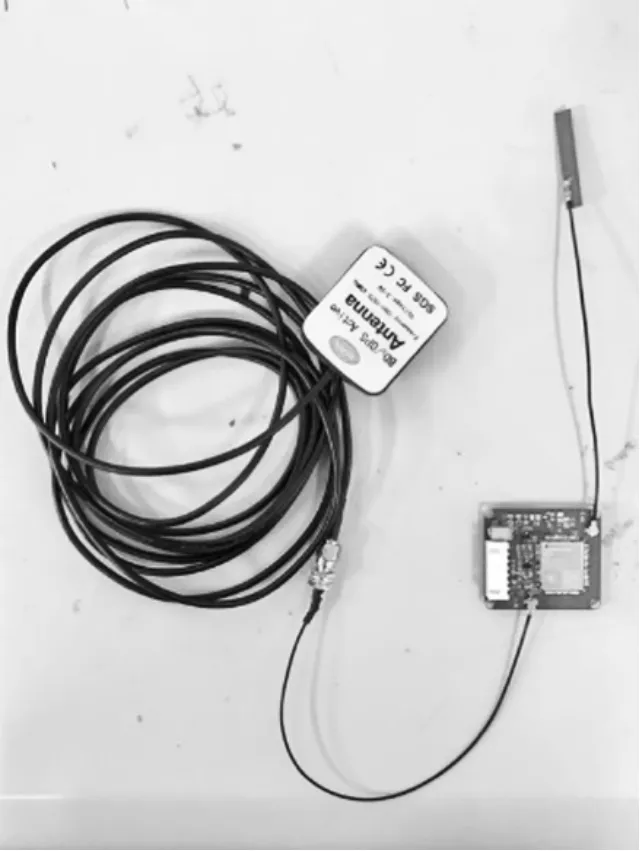
圖5 定位模塊實物圖Figure 5 Physical map of positioning module
衛星信號經過空氣傳播過程產生衰減,信號已不能被射頻芯片直接使用,故信號需進行放大。 另外,天線接收到的信號通常存在較強的噪聲,若將信號和噪聲一起放大非常不利于后續處理,因此需選用低噪聲放大器LNA(Low Noise Amplifier)對信號進行放大。 放大后的信號經過聲表面濾波器SAWF(Surface Acoustic Wave Filter)濾除干擾信號后,供GNSS 單元運算處理,獲得接收機位置信息后發送至微控制單元 MCU(Micro Control Unit),整個定位模塊的信號處理架構如圖6 所示。
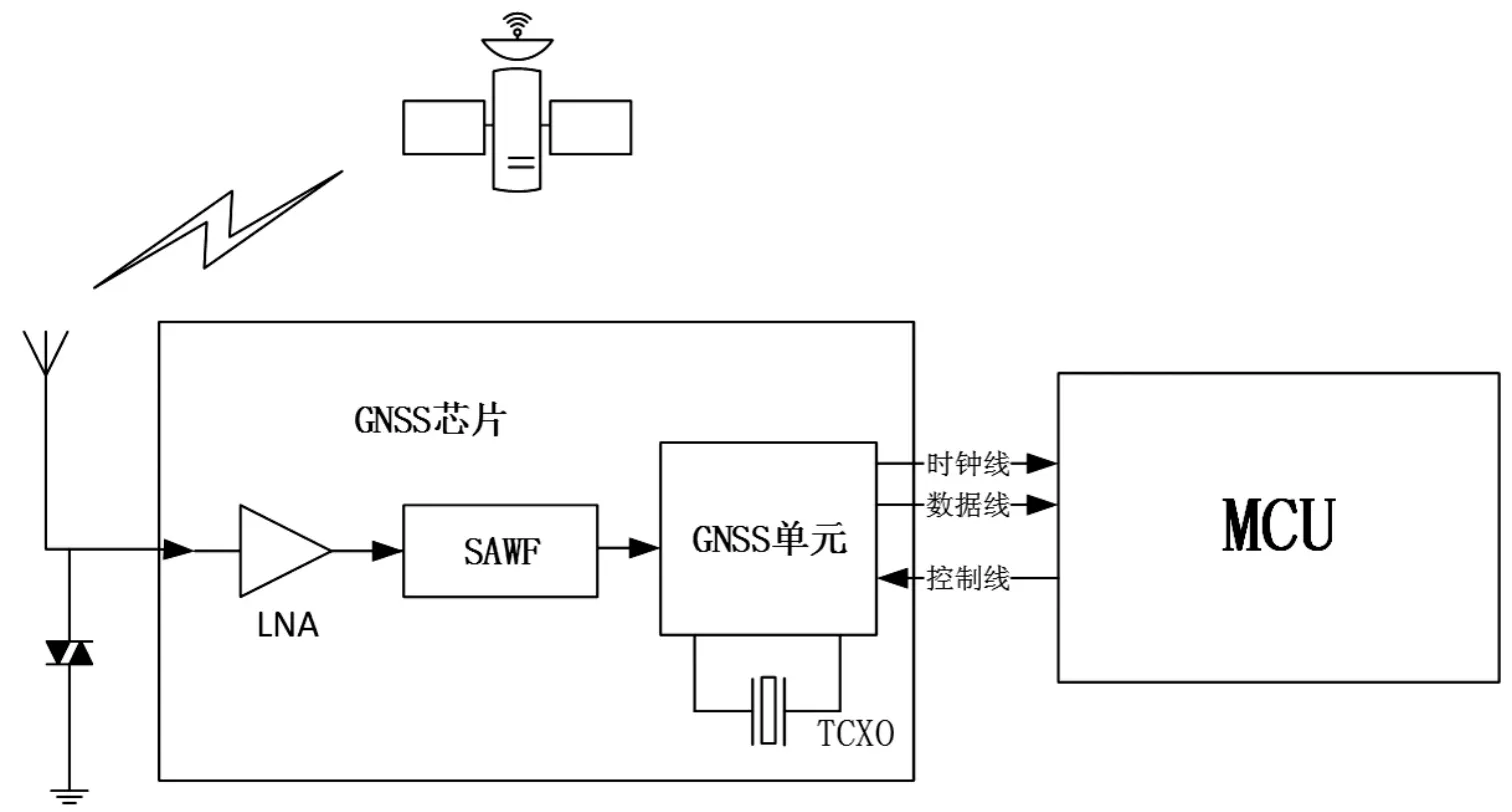
圖6 定位模塊的信號處理架構Figure 6 Signal processing architecture of positioning module
2.2 NB-IoT 通信網搭建
智能管道定位系統中, 每個節點設備都擁有一個獨一無二的第六版互聯網協議IPv6 地址。 節點上傳數據時,網絡地址存在于數據包頭部,隨管道信息發送至NB-IoT 云平臺。 云平臺選用中國電信NB-IoT 云平臺,具有擁塞控制、免心跳和命令緩存等優勢。 NB-IoT 云平臺是整個系統的通信橋梁, 基于受限應用協議 (Constrained Application Protocol,CoAP)與終端通信,并基于超文本傳輸安全協議HTTPS 與Web 應用軟件通信, 提供NBIoT 通信業務的連接管理、設備管理、數據管理和能力開發等基礎功能。
2.3 Web 應用軟件開發
智能管道定位系統Web 應用組成如圖7 所示。 智能管道定位系統的Web 程序接收到數據包后,解析獲得設備編號、位置等信息,通過SQL 語句將信息存儲至MySQL 數據庫。 程序調用地圖的應用程序編程接口API,集中顯示各節點的編號及位置信息, 有效提高智能管道定位系統的實時性、可靠性。 同時,程序可調用Java 信息推送API 通知用戶,用戶能夠及時獲取管道信息,有效提高智能管道檢測系統的實時性、可靠性。 為了提高智能管道定位系統的交互體驗,Web 應用包含以下功能:第一,節點篩選,在地圖上顯示節點編號及位置;第二,用戶接口的設計,實現節點設備的信息修正及遠程控制。
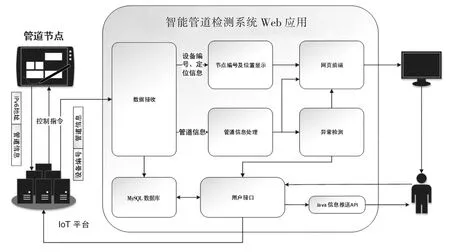
圖7 智能管道定位系統Web 應用組成Figure 7 Web application composition of intelligent pipeline positioning system
3 結語
本文針對城市地下排水管存在的問題,設計了智能管道定位系統:基于北斗定位技術,利用GNSS定位芯片和數據傳輸模塊,通過NB-IoT 網絡將信息傳輸至Web 端,實現雙向交互,可以實現管道的可視化、網絡化、智能化管理,使城市管道的監控和維修變得更加便捷。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:25:42
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中外會展(2014年4期)2014-11-27 07:46:46