基于無人機航測的區域場景快速三維建模實現
2021-03-10 19:38:27鄧強張號
河南科技 2021年19期
鄧強 張號

摘 要:本文主要研究基于無人機航測的區域場景三維快速建模方法,利用主流數據處理軟件進行無人機航測數據處理,進而得到紋理清晰逼真、滿足快速三維建模要求的實景三維模型。
關鍵詞:無人機航測;區域場景;三維建模
中圖分類號:P231 文獻標識碼:A 文章編號:1003-5168(2021)19-0021-03
Abstract: This paper mainly studied the rapid 3D modeling method of regional scene based on UAV aerial survey, used the mainstream data processing software to process UAV aerial survey data, and then obtained the real scene 3D model with clear and realistic texture and meeting the requirements of rapid 3D modeling.
Keywords: UAV aerial survey;regional scene;fast 3D modeling
1 研究背景
目前,三維建模與仿真技術已逐漸應用于應急管理等公共安全領域。因為應急場景受周圍因素的影響較大,傳統的三維建模方法難以開展,而且計算效率低,難以滿足快速建模的需要[1]。無人機航測靈活性較高,短時間內可獲取大量應急場景內高分辨率圖像,使得快速獲取應急場景內的數據成為可能,因此利用無人機航測實現區域場景快速三維建模變得極有意義[2]。
三維實景建模軟件Context Capture集自動化、并行處理、多種影像兼容性、遠程管理等特點于一身[3],因此本文將該軟件用于圖像的批量導入。為了實現對未知密閉空間內部結構的探測,吳笛等人利用移動平臺搭載兩路激光測距傳感器采集數據,并將獲得的距離數據進行融合,實現三維建模[4];宋書芳利用激光掃描測距技術,大面積采集城市建筑物的三維數據信息,實現了建筑物的三維建模[5]。本文通過研究無人機航測技術,加強影像識別能力和提高圖像去噪效果,最終實現了區域場景快速三維建模。
2 快速三維建模數據要求
2.1 數據格式要求
為了便于對成果數據進行瀏覽與分析,快速三維建模數據成果為OSGB格式。
2.2 模型精度設計要求
2.2.1 平面精度。模型相對于最近控制點的點位中誤差不大于0.30 m,模型點與鄰近模型點間距中誤差不大于0.30 m。
2.2.2 高程精度。模型基準面高程相對于最近控制點的點位中誤差不大于0.20 m,模型高度中誤差不大于0.20 m。
2.3 質量設計要求
快速三維建模數據產品的空間精度要滿足技術設計精度指標的要求,模型紋理滿足合理的視覺感官觀察要求(距離觀察點約300 m)。
2.3.1 各類主要地物地形的模型視覺效果。各種主地面地形的模型視覺效果應符合下列要求:①大型標志性建筑外形應完整表示,不宜出現明顯殘缺;②住宅樓外形應完整,無明顯殘缺,樓宇之間無粘連;③道路應完整表達,在無干擾區域不宜出現嚴重變形;④地貌應保證無干擾區域。
2.3.2 模型允許的缺陷。利用無人航測技術的方法構建實景三維模型,實質是依靠同名點匹配構建不規則三角網,結合空間交會的方法獲取特征點位的空間位置。這種建模方法解決了三維造型的生產效率問題,它與經典手工建模的實質區別在于所有實景三維模型數據都由計算機按照程序算法構建,大量模型數據不需人工識別構建。該技術手段存在一定程度的視覺缺陷。
第一,影像分辨率影響。模型中會出現表示不完整、扭曲變形的圖像;圍墻、垣柵在不同地域會出現不同程度的破損、間斷,過薄地物(廣告牌、墻體、棚房邊緣等)沒有完整、連貫表示出來等情況。
第二,時間獨立性影響。由于車輛移動和行人相關區域(如道路、停車場、廣場等)受時間獨立性的影響,因此物體在運動過程中會產生變形的情況。
第三,強反光體隨機反射性影響。受強反光體(玻璃窗、玻璃墻、水面)隨機反射性影響,航攝影像中紋理細節缺失會造成模型失真。
第四,攝影角度局限性影響。傾斜攝影的斜視鏡頭一般有38°~45°的夾角,當物體距離較近時會產生照相死角,導致影像紋理缺失,造成模型粘連失真、密集建筑群內的建筑粘連、建筑與相鄰過近的樹木粘連等情況,紋理顯示不合理。
3 快速三維模型自動化生產流程方案
數據處理過程包括原始數據檢查、數據預處理、平差處理、三維模型構建與數據格式轉換等。數據處理用到的輸入數據包括原始航飛影像、影像的外方位元素、相機參數、控制點數據以及測區邊界等。
3.1 數據檢查
對提交的航攝成果進行整體檢查,檢查項及內容如表1所示。
3.2 數據預處理
數據預處理包括影像索引信息文件的制作和影像勻光處理。
3.2.1 影像索引信息文件制作。在數據檢查的基礎上,對經緯度信息和照片文件無法逐一剔除對應的數據,同時制作影像索引信息文件。這些信息包括影像物理存儲地址、初始外方位元素信息及姿態信息。在Context Capture軟件中通過影像索引信息文件的導入即可實現影像的批量導入。
3.2.2 影像勻光處理。無人機航測進行快速三維建模通常使用傾斜攝影方法,拍攝的影像包括下視鏡頭影像和傾斜鏡頭影像。傾斜攝影中大氣對光的折射、吸收和散射直接影響影像的色差、反差、影調和清晰度,因此在大多數情況下,傾斜影像和下視影像會存在一定色調差異。為此,需要將影像根據不同類型分別制作對應色調模板進行批量勻光處理,以保證影像紋理細節信息不丟失,無過度曝光或破壞色彩平衡現象,同時較好地實現影像一致性。
經過批處理使影像清晰、亮度統一、色彩飽和度適中,可以滿足模型生產需要。
3.3 平差處理
平差處理的主要目的是實現所有影像數據的絕對定向,建立絕對位置關系,為三維建模提供絕對定向參數。首先不引入控制點數據,在外方位元素的支持下進行一次自由網平差,保證相鄰圖像、不同視角圖像之間建立較強的連接關系,然后引入控制點數據。通過平差處理,能保證整個測區數據的絕對位置精度。對于整測區平差處理無法直接通過的,先進行分測區處理,再進行平差結果合并,并對合并結果進行一次整體平差處理。
3.4 三維模型構建與數據格式轉化
經過空三加密后獲取了大量高密度的點云數據,對數據進行切塊分割,對分割區塊內的密集點云構建不規則三角網(Triangulated Irregular Network,TIN),并生成無紋理的三維模型。
基于Context Capture強大的紋理映射算法對每個模型的三角面自動賦予紋理。因為所有影像均具有精確的位置信息,所以Context Capture可在全部候選影像中自動快速地選取最清晰的紋理貼在對應位置的城市實景三維模型面上,最后輸出紋理清晰的實景三維模型。
為了適應計算機的處理能力,提高建模速度,將整個建模范圍按45 m×45 m的大小分塊切片,切片結果采用OSGB格式存儲。為了滿足后續生產數字線劃圖(Digital Line Graphic,DLG)的需要,將數據輸出為數字正射影像圖(Digital Orthophoto Map,DOM),采用TIFF格式存儲。
4 試驗分析
為驗證本文提出的無人機航測區域場景快速三維建模實現的有效性,擬定試驗平臺為MATLAB R2019b,采用Context Capture系統,選擇某城市的公園、大型商場及學校進行三維建模分析。
4.1 影像識別對比
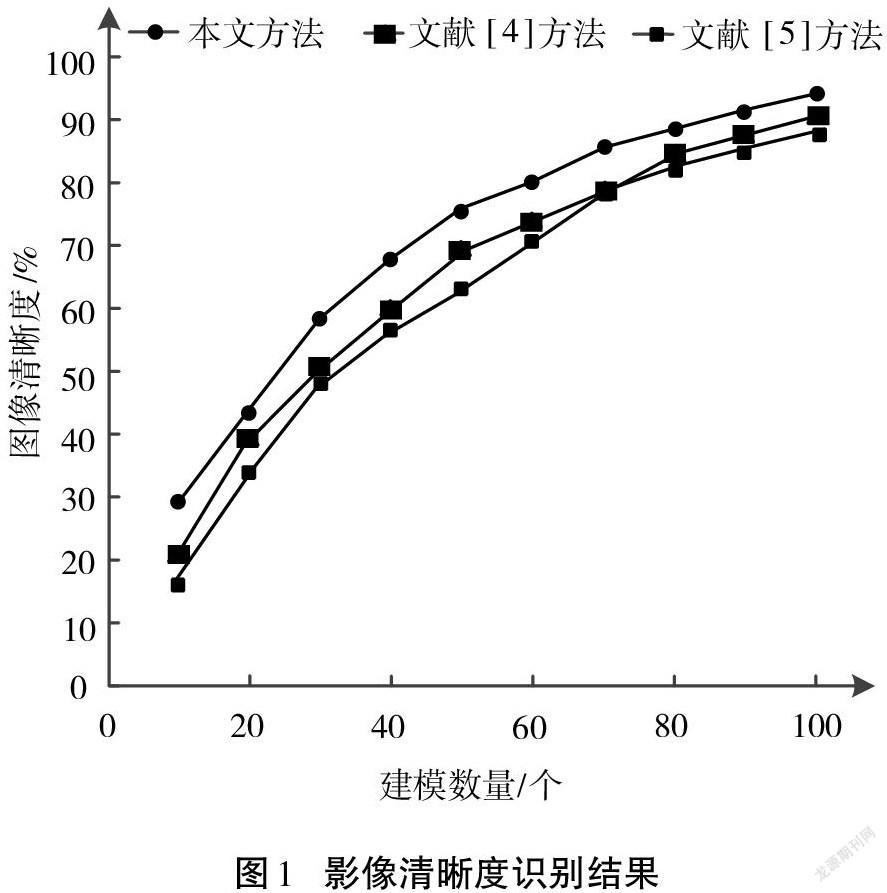
設置網速為200 Mb/s,圖像運維分量為11.379,測試本文方法與文獻[4]方法、文獻[5]方法的影像識別能力,具體仿真結果如圖1所示。
從圖1可知,本文提出的方法可以準確地識別影像信息,并且圖像清晰分類偏差處于相對穩定的狀態,可以達到97%,由此證明無人機航測具有優越性。
4.2 峰值信噪比
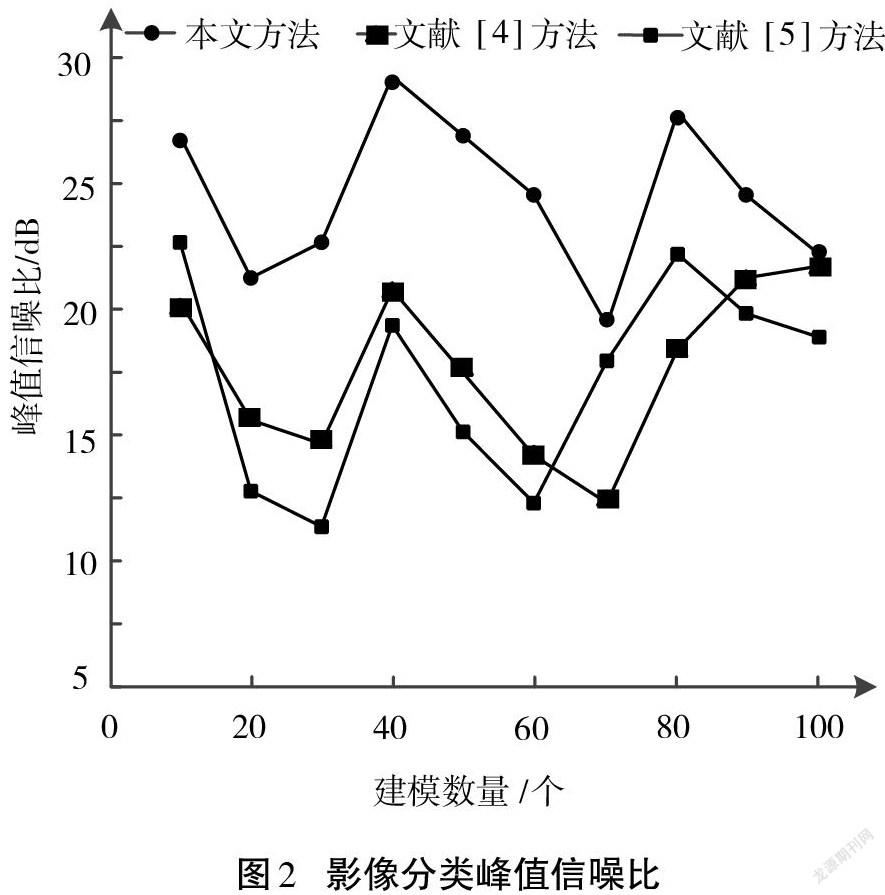
在區域場景三維建模過程中,由于各個方法的操作過程不同,導致影像數據定向效果不同,峰值信噪比有所差異。影像分類峰值信噪比的具體仿真結果如圖2所示。
從圖2可知,與另外兩種方法相比,本文提出的方法的圖像分類復雜度較低,峰值信噪比保持在25 dB以上,說明利用本文方法進行圖像去噪具有突出的優勢。
4.3 三維建模時間對比
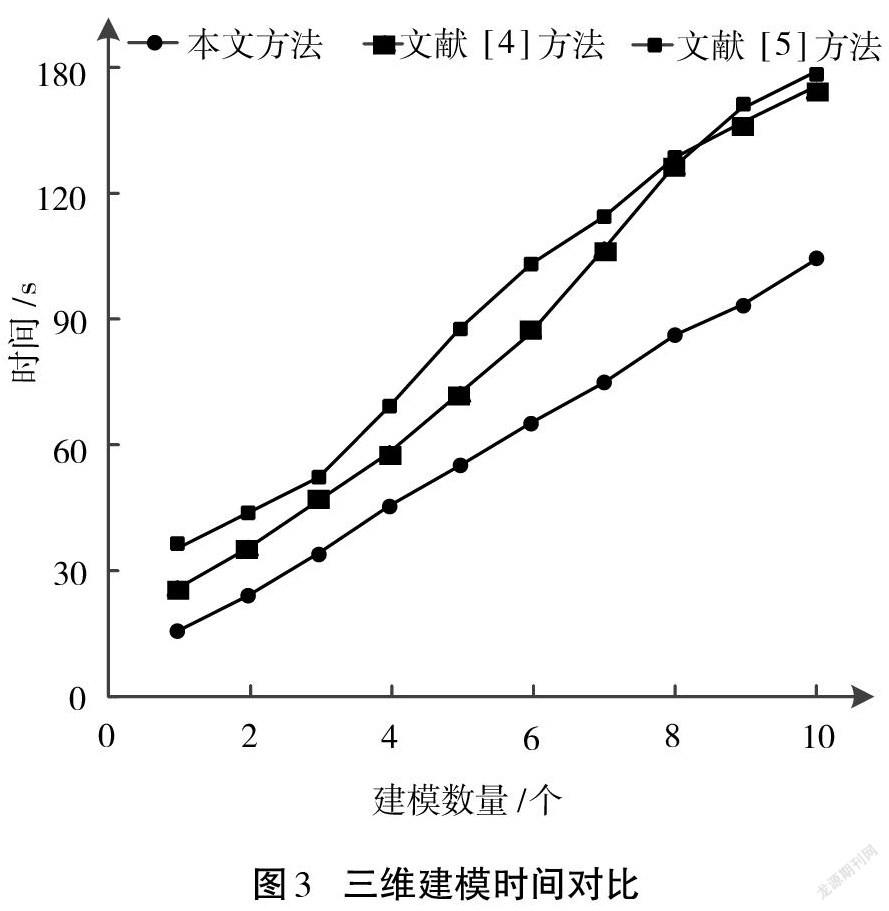
為了更加全面地驗證無人機航測的區域場景三維建模的優越性,重點對比3種方法的三維建模時間,具體仿真結果如圖3所示。
從圖3可知,由于無人機航測利用數據平差的方式對識別影像逐層進行分解重構,因此可以有效地對區域場景影像進行去噪處理,促使無人機航測的區域場景實現快速三維建模,效率明顯高于另外兩種方法。
5 結語
在對區域場景三維快速建模的方法進行研究后可以發現,無人機航測技術在區域場景三維建模中具有獨特的優勢。工作人員可以利用無人機靈活且效率高的優勢,用三鏡頭或五鏡頭以及點云等數據收集系統進行場景區域數據收集,通過軟件生成三維模型。由于無人機航測所獲得的數據會受到地形高低差而產生一定的形變,因此需要進一步完善和采用空中三角測量等技術,以確保區域場景的三維建模精度得到進一步提升。
參考文獻:
[1]黃文鋒,余振強.基于無人機航測的區域場景快速三維建模實現[J].河南科技,2017(17):24-26.
[2]傅毓.基于無人機航測的區域場景快速三維建模實現[J].科技經濟導刊,2020(2):33.
[3]趙子昂.基于Context Capture的小型物件傾斜攝影3D建模的研究[J].數字技術與應用,2020(6):29-31.
[4]吳笛,倪晉平,陳丁,等.360°激光測距的可移動三維建模方法[J].測試技術學報,2019(1):14-18.
[5]宋書芳.基于機載LIDAR技術的建筑物三維模型快速構建方法探討[J].山東工業技術,2019(2):146-147.
3478500338297
